
Abstract
A hybrid optimization method that combines parameter optimization (PO) with topology optimization (TO) is proposed for the design of a permanent magnet (PM) motor. The PM shape, configuration, and flux barrier topology were simultaneously optimized using the proposed method. The conventional hybrid method that deals with a single PM is effectively extended to deal with multiple PMs parameterized by several geometrical parameters. The use of this extension makes it possible to search for the optimal rotor structure of the multiple-PM motor, which is widely used in electric vehicles. The results obtained by the proposed method are shown superior over those obtained by conventional method. The rotor structure with double-U shaped PMs with small flux barriers near the airgap was obtained by the optimization.
Keywords
Introduction
Permanent magnet (PM) motors have high efficiency and high power density and are used in various electric devices, including motors for electric vehicles. A lot of research has been carried out to develop PM motors to improve those characteristics [1–3]. Parameter optimization (PO) and topology optimization (TO) have been shown to be effective for improving the efficiency of PM motors [4–7]. In particular, the shape and arrangement of the flux barrier and permanent magnet in the rotor are crucial to improve the performance of PM motors. In [4–6], it has been shown that TO applied to the magnetic structure of the rotor leads to excellent torque characteristics. Because TO can generate arbitrary shapes, it would be suitable for the optimization of flux barriers. On the other hand, the magnet shape of PM is generally limited to rectangular or fan shape due to the production method and cost. For this reason, the PO method would be suitable for the design of PMs. An optimization method that hybridizes PO with TO methods was proposed in [8], which represented the PM shape and position by geometrical parameters for PO, whereas the flux barriers are represented by the shape function, which is a linear combination of the Gaussian basis functions for TO. The optimization variables for this TO are the weighting coefficients of the Gaussian functions. For the optimization, a stochastic algorithm, such as the genetic algorithm (GA) or covariance matrix adaptation evolution strategy (CMA-ES) [9], is adopted owing to the difficulty in evaluating the sensitivity of the objective function with respect to the geometrical parameters and weighting coefficients. Moreover, the stochastic algorithm can perform a global search, whereas gradient-based methods would lead to local minima. A large problem has remained in [8]; that is, a single PM is only considered and cannot move freely in the design region, although multiple PMs are widely employed for PM motors in electric vehicles.
In this study, the PO-TO hybrid method is extended to address multiple PMs. The proposed hybrid optimization method was applied to design the rotor shape of an internal PM (IPM) motor to maximize the average torque and minimize the torque ripple. The proposed method allows us to deal with multiple-PM motors that are integral for both electric vehicles and various electric systems. In the optimization process, individuals with overlapping PMs were eliminated. The proposed method is compared with the conventional method and a sequential optimization method that sequentially performs PO and TO. Furthermore, on the basis of the proposed method, the performance of the optimal IPM motors that contain single, double and triple magnets are compered.
Proposed method
Parameter optimization
In the design of IPM motors, there are constraints on the PM shape owing to limitations in volume, manufacturing process, and cost. The parameter representation of the PMs enables us to easily consider these constraints in the optimization process. Therefore, PO would be more beneficial for the optimization of PMs than TO. In [8], the curvature 𝜅 and distance d
c
to the rotor axis were chosen as the optimization variables, as shown in Fig. 1(a). In this study, to consider more diverse PM configurations, the shape parameter
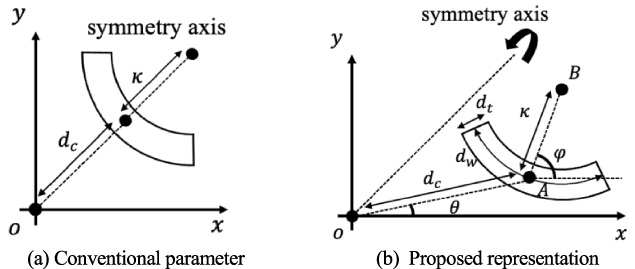
Parameterization of PM.
The design of the rotor flux barrier is crucial for improving the torque performance and efficiency. In contrast to the optimization of PMs, it is difficult to preliminarily define design variables for flux barriers with flexible shapes. Therefore, topology optimization, which allows the generation and annihilation of holes and the free deformation of material boundaries, is effective for the optimization of flux barriers. Numerous methods are used for topology optimization, including sensitivity-based approaches, such as the level set method [10,11] and density method [12], as well as stochastic approaches based on the normalized gaussian network (NGnet) applied to the ON/OFF method [13,14]. In this study, the NGnet method was employed owing to its high searchability and lack of necessity for sensitivity computations. In this method, Gaussian basis functions are uniformly placed in the design region, and the material distribution is determined from the shape function defined by
In a previous study on NGnet-based TO [14], a fixed finite element mesh was employed to determine the material of each element; this method, called the ON/OFF method, tends to produce a jagged shape, which causes difficulties in the manufacturing process. Although the resolution of the shape representation can be increased by making the fixed finite element mesh finer, this increases the computation time for finite element analysis (FEA). To avoid this problem, the FE meshes were adaptively generated as follows: We used open-source software (https://github.com/MmgTools/mmg) to generate a mesh that performs “implicit meshing” as proposed in [16]. As illustrated in Fig. 2, the values of the “level set” function are assigned to the vertices of a highly subdivided base mesh to generate a new mesh in which the material boundaries correspond to the 0-valued contours of the input level set function. The values of the shape function φ(

Flow of implicit-domain meshing.
As shown in Fig. 3, the rotor shape of the motor is determined by the PM parameters
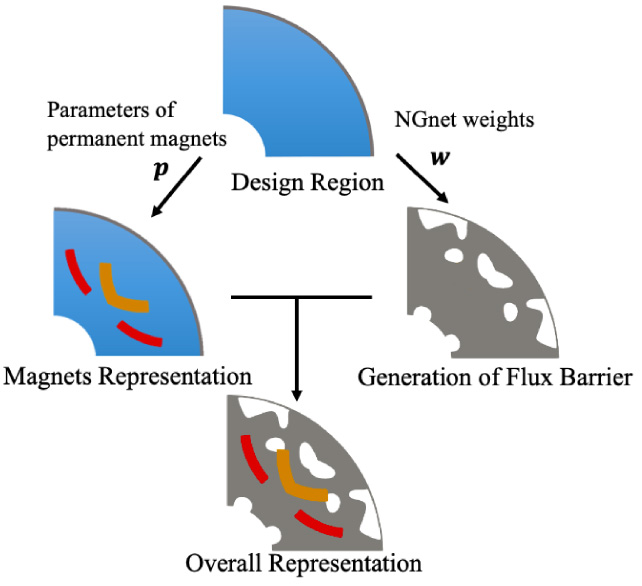
Representation of rotor shape.
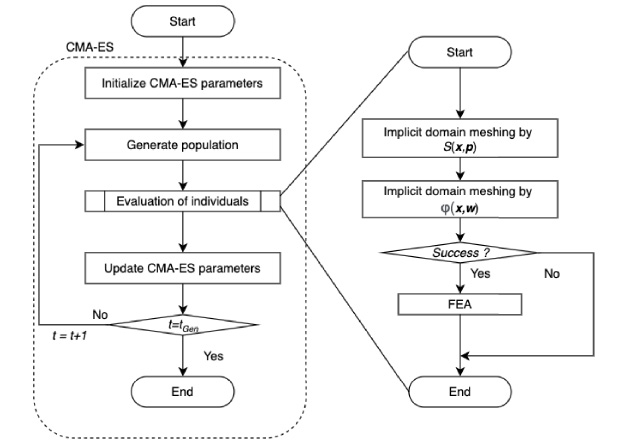
Flow diagram of the optimization using CMA-ES.
Effect of multiple PMs
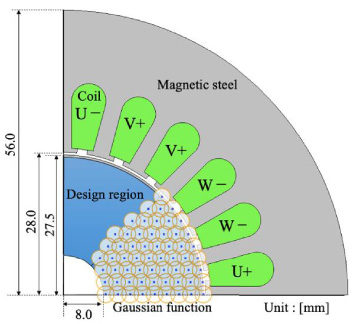
Analysis motor. Circles represent the Gaussian functions.
We applied hybrid optimization to the model motor shown in Fig. 5. Considering the symmetry, the design region was set to half of the rotor region. Specifically, we assumed 60 Gaussian functions,σ = 0.0015, the centers of which were uniformly placed in the design region. In this problem, the position and shape of the two PMs and the flux barrier distribution were optimized. The optimization problem is defined as follows:
Reference model.
Parameters for FEA and CMA-ES
Table 2 summarizes the characteristics of the reference and optimized motors. Figures 7 and 8 illustrate the rotor shapes and their torque waveforms optimized using the proposed, conventional, and sequential methods, respectively. It is concluded from Table 2 that the motor obtained by the proposed method has the the highest value for T ave and the lowest value for T rip . In sequential optimization, the spacing between the PM and rotor surface is extremely narrow as a result of the PO. Therefore, flux barriers were not generated. The result suggests that the proposed hybrid method is superior to the sequential approach.
Characteristics of reference and optimized models
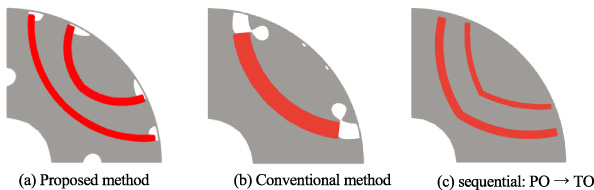
Optimization results.
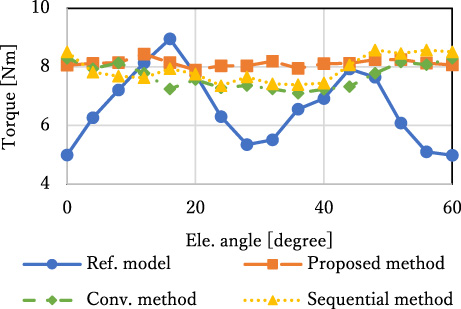
Torque waveforms.
To consider the torques in detail, they are decomposed into magnet torque T
mag
and reluctance torque T
rel
. In this work, T
mag
and T
rel
were obtained from the magnet flux Φ
m
and d- and q-axis self-inductance L
d
, L
q
, as follows:
Characteristics of reference and optimized models
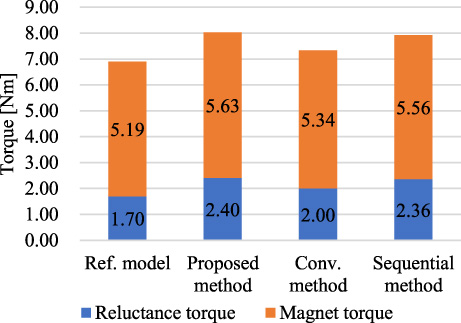
Reluctance and magnet torque.
To compare the results of the proposed method with different numbers of magnets, optimization was performed by assuming single, double, and triple PMs. The design variables were 66 and 78 for single and triple magnets, respectively, and the other settings remained unchanged.
The characteristics of the optimization results are listed in Table 4. The resulting rotor shapes are illustrated in Fig. 10. We found that the performance of the single-PM motor was worse than that of the double- and triple-PM motors. Remarkably, triple-PM optimization results in double U-shaped PMs. The objective function is also almost the same as that of the double U-shaped PMs. The result suggests that a motor with double U-shaped PMs is the best under this optimization condition.
Characteristics of hybrid optimized models for different number of magnets
Characteristics of hybrid optimized models for different number of magnets

Optimization results for different number of magnets.
In this study, we successfully extended the conventional method by enriching the magnet parameters and increasing the possible number of PMs. The optimized results of the proposed method exhibited a better performance than those of the conventional method. Based on the results, it can be concluded that the IPM motor with double-U-shaped magnets provides the best torque performance among the classes that the proposed method can represent.
Footnotes
Acknowledgement
This work was supported in part by JSPS KAKENHI (Grant Number 21H01301).