
Abstract
Recently, demand for thin steel plates has increased. In the manufacturing of thin steel plates, surface quality deterioration due to contact between the rollers and steel plate involved is problematic. We are investigating magnetic levitation conveyance to propose a noncontact conveyance system using electromagnets. However, the magnetic levitation of thin steel plates is unstable because of the deflection in the range where the electromagnetic force is not affected. Therefore, to improve the levitation stability, we are investigating a bending magnetic levitation system in which a thin steel plate is bent during magnetic levitation but not deformed plastically. In this study, a dynamic analysis using the finite difference method is performed to understand the behavior of a thin steel plate during magnetic levitation. In the dynamic analysis, vibration is evaluated based on the displacement standard deviation. The dynamic simulation visualizes the dynamic behavior of a levitated flexible steel plate.
Introduction
In recent years, techniques that use electromagnetics and the application of electromagnetics have been investigated extensively [1]. Magnetic levitation technology is maintenance-free and can result in environmental problems because it enables objects to be shifted in a noncontact manner [2]. Thin steel plates are typically transported via friction with the steel plate. However, contact with an object deteriorates the surface quality. From an environmental perspective, steel materials used for electric appliances should not require significant resources, and the demand for thin steel plates is increasing. However, surface quality deterioration during the manufacture of thin steel plates is a significant problem. Hence, magnetic levitation technology has been investigated [3,4]. When a thin steel plate is magnetically levitated by a limited electromagnet, the thin steel plate becomes flexible; thus, it bends at a location distant from the electromagnet, where the magnetic field is absent. Previously, we proposed bending magnetic levitation as a method for stably performing magnetic levitation on a thin steel plate [5]. We successfully manufactured a bending magnetic levitation system and improved the levitation stability of thin steel plates. However, we discovered that levitation stability deteriorated under disturbance conditions. To improve the levitation stability, two methods can be considered. One is improvement of hardware, and another is established of a control model for robust against disturbance. Although we have previously produced a robust control model to improve levitation stability, it is not sufficient [6]. Therefore, we focused on improvement of hardware. Electromagnets, which can vary its attractive force, are used for magnetic levitation to control the levitation of a steel plate. It is expected to improve the levitation performance by changing the parameters of electromagnets, but there is a trade-off relationship between the attractive force exerted by the electromagnet and its responsiveness. To solve the vibration problem of the steel plate, we thought that it might be possible to improve the levitation performance by changing the characteristics of the electromagnet. It is necessary to consider electromagnet specifications that are different from the electromagnets that have been used in conventional magnetic levitation devices.
Therefore, an electromagnet with a different wire diameter was fabricated and an experiment was conducted on the characteristics of the electromagnet. However, it is not realistic to experimentally verify the performance of all electromagnets with various specifications. Though it is expected to investigate the levitation performance of each electromagnet using analytical method, magnetic levitation needs to include electrical, magnetic, mechanical, and control analysis. Therefore, we previously constructed magnetic levitation simulations using the finite difference method, which can comprehensively analysis in these views, and were able to examine the vibration characteristics of the steel plate [7]. In this study, we made an electromagnet and measured its characteristics. We performed the levitation simulation with change of electromagnet parameters and evaluated the vibration of the steel plate due to the change in the characteristics of the electromagnet.
Bending levitation system
Figure 1 shows a photograph of the bending magnetic levitation system. Figure 2 shows a schematic illustration of the electromagnetic levitation control system. A previously reported bending magnetic levitation system successfully generated the required attractive force for levitation in five electromagnet units installed directly above the steel plate. The object for electromagnetic levitation was a rectangular zinc-coated steel plate (SS400) with length a = 800 mm, width b = 600 mm, and thickness h = 0.18 mm. The electromagnet used in the bending magnetic levitation system was an E-type ferrite core, in which an enamel wire with a diameter of 0.5 mm was wound 1005 times. The electric circuits of the paired electromagnets were connected in series, whereas an eddy-current gap sensor was positioned between the two magnets of each pair. The eddy-current-type displacement sensor was used to measure the displacement of the steel plate under the electromagnet unit. The detected displacement was input to the Digital signal processor (DSP) via an A/D converter and converted to velocity through digital differentiation in the DSP. The electromagnet coil current was measured from the external resistance, and the control voltage was calculated based on three observed values: displacement, velocity, and current. A control voltage was output from the D/A converter into a current-supply amplifier to control the attractive force of the five pairs of electromagnets such that the steel plate is levitated below the surface of the electromagnets by 5 mm. Figure 3 shows the electromagnet angle (θ = 13°). Among the five pairs of electromagnets, four pairs at the corners can be inclined. In addition, the central electromagnet can be shifted in the vertical direction. Thus, by moving the five electromagnets, bending magnetic levitation was achieved on the steel plate. Figure 4 shows the arrangement of the electromagnet units.
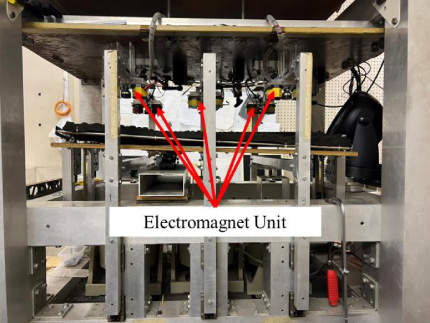
Photograph of bending magnetic levitation system.

Schematic diagram electromagnetic levitation control system.
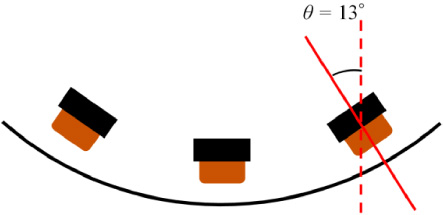
Illustration of electromagnet angle (θ = 13°).
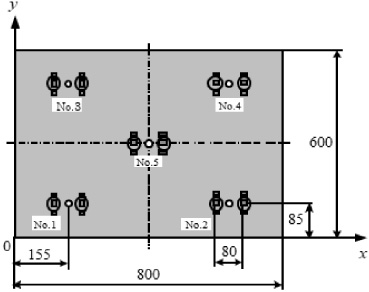
Arrangement of electromagnet units.
Three electromagnets with different sizes were manufactured, and the inductance was measured. Figure 5 shows a photograph of the electromagnets manufactured. For the three electromagnets, the core and bobbin were unified, and enamel wires with conductor diameters of 0.3, 0.5, and 0.7 mm were used. Because wires with different diameters were wound around the same bobbin, the number of turns of the coil varied based on the wire diameter used. The number of turns of the coil was set to the maximum number that can be wound. Table 1 lists the specifications of the electromagnets. In the RL circuit, the relational expression holds for the time constant τ and inductance L.
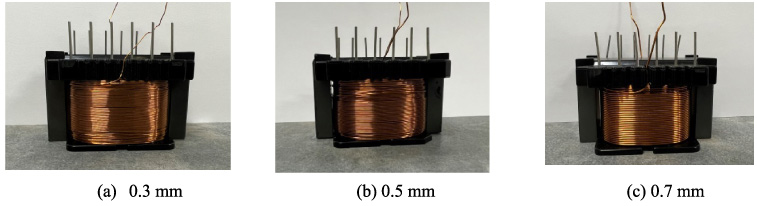
Photograph of the created electromagnet.
Three types of wire electromagnets investigated in current study
The inductance of the electromagnet includes an effective inductance that can contribute to the attractive force (the proportional constant of the electromagnet) and leakage inductance, which does not become an attractive force. The relationship between the attractive force of the electromagnet and the effective inductance (the proportional constant of the electromagnet) is expressed as follows:
An analysis program was designed using the finite difference method to simulate magnetic levitation. The finite difference method was used for this analysis program because it is easy to design and has a low computational load.
Static shape analysis of levitation steel plate
To obtain the initial conditions for the dynamic analysis of the bending magnetic levitation, a static shape analysis of the magnetic levitation steel plate was performed. The equations associated with the deflection of the steel plate in the stationary state during magnetic levitation are as follows:

Result of static shape analysis. (Electromagnet angle θ = 13°).
The equation of motion of the magnetic levitation steel plate in the dynamic state can be expressed as follows by adding the inertial and attenuation terms to Eq. (4):
Values used for analysis in current study
Feedback gain
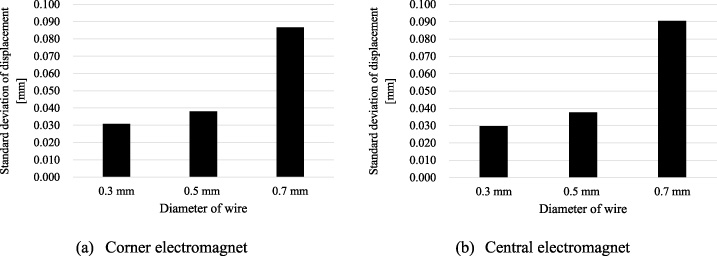
Standard deviation of analytical displacement for each conductor diameter.
To examine the vibration of the steel plate when the electromagnet characteristics change, we set three electromagnet parameters and performed a magnetic levitation simulation. To evaluate the vibration of the steel plate when the velocity gain is changed, the initial displacement of the steel plate is controlled such that the displacement converges to the control point from a position 1 mm from the initial shape. The calculation grid measured 10 mm × 10 mm, and the displacement of the steel plate for 5 s at 4941 analysis points was calculated. The electromagnet angle was 13°. This electromagnet angle has been reported to be the ideal value for achieving the best levitation performance when magnetically levitating a steel plate with a plate thickness of 0.18 mm.
Analyzed dynamic behavior of levitated steel plate
We investigated the effects of electromagnet characteristics on the vibrations of a steel plate in a bending magnetic levitation system. Figure 7 shows the standard deviation of displacement for the conductor diameter of a (a) corner electromagnet and (b) central electromagnet. For the corner electromagnet, the standard deviation of the displacement was lower, and the vibration was smaller in the electromagnet with a smaller conductor diameter and a larger inductance. The same behavior was demonstrated by the central electromagnet.
Conclusions
In order to investigate the effect of changes in electromagnet characteristics on levitation performance, electromagnets with different wire diameters were created and the electromagnet characteristics were investigated. In addition, the steel plate vibration of the magnetic levitation steel plate when applying the electromagnet created by performing the magnetic levitation simulation using the finite difference method considering the obtained electromagnet characteristics was investigated. As a result, it was confirmed that changing the wire diameter of the electromagnet affected the vibration of the steel plate. In the scope of this study, it was found that high levitation performance can be expected by using an electromagnet with a small wire diameter. In the future, we will conduct magnetic levitation experiments with new electromagnets and examine the effects on steel plate vibration. In addition, we will investigate the effect on steel plate vibration due to changes in plate thickness and electromagnet angle.
Footnotes
Acknowledgment
This work was supported by JSPS KAKENHI Grant-in-Aid for JSPS Research Fellow 22J14069.