
Abstract
We propose a 6-phase 12/10 switched reluctance motor (SRM) with a polygon connection. The transformation between star and polygon connections is not equivalent to that between star and delta connections of a conventional 3-phase motor. In this paper, the transformation between star and polygon connections is theoretically described. In addition, the current condition that maximizes torque is described. Finally, the torque of both connections is compared in terms of the AC-DC current ratio.
Introduction
The number of applications of a switched reluctance motor (SRM) is lower than that of a conventional permanent magnet synchronous motor. One of the reasons is a large torque ripple and large vibration. In order to solve this problem, 6-phase SRMs have been developed [1–10]. These references mainly focus on the inverter and control configuration. In addition, reference [5] describes a new coil connection that forms a hexagon. However, the effectiveness of the hexagon connection is not mathematically compared with conventional coil connections. We propose a 6-phase SRM that is driven by a 3-phase asymmetric inverter, where 6-phase coils are connected in a neutral point [11–14]. On the other hand, in order to increase the torque density of the 6-phase SRM with a neutral point, we propose a polygon connection for a 6-phase SRM that 6-phase coils are connected with each other without neutral points [15,16]. The polygon connection is based on the hexagon connection described in [5]. There is an equivalent transformation between star and delta connections in a 3-phase motor. However, there is not an equivalent transformation between star and polygon connections in a 6-phase SRM, and this generates a variety of characteristic differences [15]. However, the mechanism of the characteristics differences between the star and polygon connections is not theoretically shown. In addition, there is not a comparison under the same conditions.
In this paper, inequivalent transformation between star and polygon connections is mathematically described. The influence of the inequivalent transformation is investigated by finite element analysis (FEA), and the cause of the characteristic difference is discussed. Finally, the star and polygon connections are compared under the same condition.
Star and polygon connections
Inequivalent transformation
A 6-phase SRM in this study has 10 salient poles and 12 slots as shown in Fig. 1 [15]. The SRM has 6 phases A through F, and 12 coils are wound in each tooth. The connection of these coils is a star connection as shown in Fig. 2(a) or a polygon connection as shown in Fig. 2(b). In this section, the inequivalent transformation between the star and polygon connections is mathematically described.

6-phase SRM.
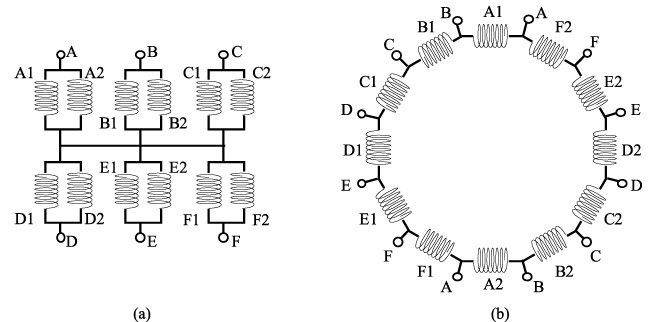
Star connection (a), and polygon connection (b).
The coil current of the A-, B-, C-, D-, E-, and F-phase coils is defined as i a , i b , i c , i d , i e , and i f , respectively, as shown in Fig. 3, where each coil consists of 2 parallel coils (e.g. A1 and A2). The line current between the inverter and SRM is also defined as I a , I b , I c , I d , I e , and I f , where I a , I b , I c , I d , I e , and I f are equal to the coil current of the star connection.

Current definition.
When a 6-phase SRM is driven by pulse voltages, the current is one-way, and is divided into DC and AC components. Assuming that the AC component of the line current consists of only a fundamental component, the 6-phase current waveform is defined as (1).
Next, the ratio of the DC and AC current components in the 6-phase SRM is focused. When the inductance and AC component of the current consist of only a fundamental component, the torque T of the 6-phase SRM can be approximated as shown in (4) [8].
The coil current of the 6-phase SRM consists of a DC component I
dc
and AC component I
ac
, and the effective value of the coil current I is shown in (5).
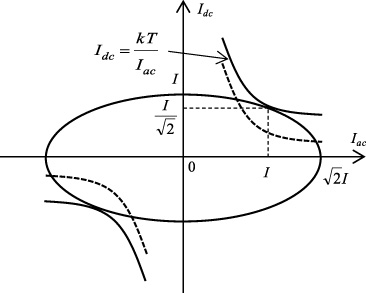
Constant current ellipse and inverse proportion curves.
Next, assuming that Lac1, Mac1, and Mac2 in (4) are constant, Eq. (4) is transformed, and the DC component of the current I
dc
is shown in (6) using a proportional constant k.
Input current
The torque when 4 patterns of currents are applied to a 6-phase SRM with a star connection is compared by 2-D FEA (Software: JMAG-Designer 22.0).
Firstly, the DC and AC components of the coil current are equal to each other, and they are defined as I
ac
. The effective value of the coil current is shown in (9).
Next, a polygon connection that the number of coil turns is
Similarly, a polygon connection that the number of coil turns is twice as large as that of the star connection is considered. This corresponds to that the DC component of the magnetomotive force is equal between the star and polygon connections, and the AC component of the magnetomotive force of the polygon connection is
Finally, the ratio when the torque is maximum is considered. In this time, the DC component of the current is
The effective value of the current shown in (9), (10), (11), and (12) is equal to each other because the constant current circle shown in Fig. 4 is considered. Therefore, 4 patterns of the input currents are shown in Table 1. From Table 1, it is observed that the input current of the pattern 2 is equal to that of the pattern 3. This means that the same torque is obtained in 2 patterns under the same effective value of the input current.
The current shown in the previous section is applied to the model shown in Fig. 1, where the stator size is 𝜙180 × 55 mm, number of coil turns is 20, phase resistance is 0.025Ω, and the material of the rotor and stator is laminated silicon steel sheets 35JN300, where the rotor and stator will be punched out and annealed after stacking. The mesh model is shown in Fig. 5. The torque waveforms under I dc = I ac = 30 A at 2000 rpm are shown in Fig. 6.
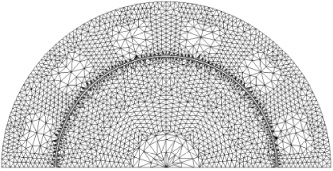
Mesh model.
Applied phase current

Torque waveforms of 4 patterns when line currents shown in Table 1 are applied.
From Fig. 6, the torque of the Pattern 4 is maximum, and the ratio of the DC and AC current components that the torque is maximum is verified, where the 6th order torque ripple are observed in all torque waveforms. This is due to the 2nd component of the inductance. In addition, the efficiency is shown in Table 2, where only copper losses are considered in the calculation of the efficiency. The efficiency of the Pattern 4 is 0.5% lower than the other patterns. This is because the input voltage is increased due to the high EMF. Therefore, the ratio of the DC and AC current components that the torque is maximum is the Pattern 4, and that of the polygon connection is close to the Pattern 4 than that of the star connection.
Motor efficiency of 4 patterns
In the model shown in Fig. 1, 3 coil connections shown in Table 3 are compared. In this comparison, the AC component of the magnetomotive force of the Model 2 is equal to that of the Model 1, and the DC component of the magnetomotive force of the Model 3 is equal to that of the Model 1. The input current of 3 models is shown in Table 4, and the effective value of the magnetomotive force in the coil of 3 models is equal to each other. This means the coil current density of 3 models is the same with each other.
Specification of 3 models
Specification of 3 models
The torque waveform, and coil current waveform under I dc = I ac = 30 A at 2000 rpm are shown in Figs 7, and 8, respectively, and the computed characteristics are shown in Tables 4, and 5. From Fig. 6, and Table 4, the torque of the Model 2 is maximum. However, the effective value of the coil current is the same with each other. In addition, the torque ripple of the Model 1 is smallest. However, the difference of the torque ripple among 3 models is small. From Fig. 8, it is observed that the coil current of the Model 2 and Model 3 is an alternating current although these are SRMs. This is due to the polygon connection. The ratio of the DC and AC coil current components is close to the theoretical value. The small difference between the theoretical and computed current values is due to the current harmonics.
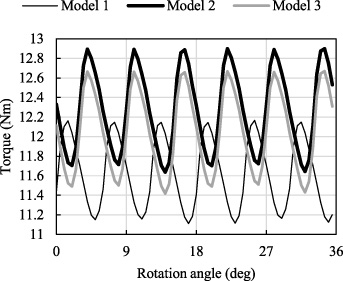
Torque waveforms of 3 models when line currents shown in Table 4 are applied.

Coil current waveforms of 3 models.
Applied phase current of 3 models
Analysis result of 3 models
The reason why the torque of the Model 2 and Model 3 is higher than that of the Model 1 is that the ratio of the DC and AC current components is near to 1:
A 6-phase SRM with a polygon connection was compared with that with s star connection. The inequivalent transformation between the star and polygon connections was described. In addition, the ratio of the DC and AC current components that maximizes torque was described, and that with a polygon connection was close to the theoretical value that maximizes torque. Finally, the torque with star and polygon connections were compared by finite element analysis. The torque of the polygon connection was higher than that of the star connection under the same magnetomotive force. This paper clearly indicated that a 6-phase SRM with a polygon connection has a higher torque density than that with a star connection. In future works, measurements on prototypes with star and polygon connections will be carried out.
Footnotes
Acknowledgements
The authors have no acknowledgments.