
Abstract
The behavior prediction of non-linear dynamic system is a challenging problem, especially when the system includes many independent subsystems. The observations from the complex dynamic system are the result of the interaction of multiple dynamic subsystems, which results in a loss of predictability. In this paper, signal separation technique is adopted to separate the observations of complex non-linear dynamic system in order to improve its predictability. And then local support vector regression technique is used to model the separated observations and make prediction. Finally, the prediction results are remixed as the original observation prediction or the behavior prediction of the complex non-linear dynamic system. The experimental results show that the proposed method improves the prediction accuracy substantially, which proves that signal separation can improve the predictability of complex non-linear dynamic system.
Introduction
A time series is a series of observations from some dynamic system. In many situations, people always want to know the mechanism of the under-observed dynamic system and try to predict the system evolution in the future. The equivalent dynamic system needs to be reconstructed from the observed time series. Nevertheless, the observed time series are always noisy, non-stationary or even non-linear, which makes the equivalent dynamic system modeling quite difficultly. So, time series forecasting is a challenging statistical signal processing problem and has been applied in many fields such as network traffic demand prediction, medical diagnosis, air pollution forecasting, machine condition monitoring, financial investments, production planning, sales forecasting, channel prediction and so on [1, 2, 3, 4, 5].
Nowadays, many methods have been proposed to deal with the modeling and prediction of the time series. Box and Jenkins proposed the widely used ARMA model to model the time series and make prediction. Unfortunately, the ARMA model can work well only for stationary time series. Non-linear modeling methods have been proposed to model the non-stationary or non-linear time series and make prediction. Lee et al. proposed RBF neural network as a global model for prediction [6]. Wu et al. proposed support vector regression (SVR) as a global model for time series forecasting [7]. The global prediction model works well only when the non-linear time series varies slowly. Non-linear time series in the real world varies complicatedly and has strong self-similarity. Many local modeling techniques have been proposed for non-linear time series prediction, such as local wavelet neural network, FIR neural network, mixture expert models, support vector machine experts and so on [8, 9, 10, 11]. However, the prediction performance of local modeling is still not good enough when the observed time series is mixed with many non-linear time series generated by independent non-linear dynamic sub-systems.
In this paper, the signal separation technique and local prediction modeling are combined to do behavior prediction of complex non-linear dynamic system with many independent subsystems. Firstly, signal separation algorithm such as FastICA [12] is used to improve the predictability of observations. Secondly, the local support vector regression is trained with every separated independent series. Finally, the prediction results of every separated series with its local support vector regression are merged with mixed matrix obtained in the separation stage in order to predict the original observations.
Technical background
Support vector regression
The SVR [11, 13] is a linear regression in a feature space. The feature space is introduced by a function which maps the input space to the high dimensional feature space, i.e.
It allows errors to occur within the interval
where
The cost function penalizes the large values of w by using
The cost function of SVR is
This constrained optimization problem can be solved by applying the Lagrange technique [14]. Therefore, we have
where
Equation (2.1) represents a standard constrained quadratic programming problem, which can be solved by using optimization toolbox in our simulation study. The solution of the dual objective function is equal to the solution of the primary objective function. For non-linear cases, the dot product
where
where
Independent component analysis (ICA) of observed n-dimensional random vectors
Using the natural gradient method under the constraint
where
Improving the behavior prediction performance of complex non-linear dynamic system is a challenging problem. The behavior prediction performance of complex non-linear dynamic system with several independent subsystems is worse than the prediction performance of non-linear dynamic systems with single subsystem. The observations of complex dynamic system are the mixtures of several observations from different non-linear dynamic subsystems. Some useful information for prediction is lost when mixing happens. Two main problems should be resolved to improve the prediction performance of the complex non-linear dynamic system. One problem is whether signal separation can improve prediction performance or not. The other problem is how much linear or non-linear mixing affects the prediction performance. This paper focuses on the first problem and linear instantaneous mixing is assumed for simplicity. The second problem will be considered in the future work. Linear instantaneous mixing assumption means that the channels between the state variables of dynamic subsystems and the observing sensors are linear and non-memory. Let
In this paper, a novel behavior prediction method for complex non-linear dynamic system is proposed. Let a complex non-linear dynamic system be composed of several independent subsystems. Several sensors are used to investigate the state of the complex system. The output of every sensor contains the information of all subsystems. As mentioned earlier, it is assumed that the output of every sensor is linear instantaneous combination of the states of all subsystems. Let
At time Every separated signal Feature extraction is done on the segmented samples with wavelet and PCA in order to avoid over-fitting and to improve efficiency of training. An Do prediction with the well trained Get the prediction of observations by After the observations are obtained at time
Three real-world datasets are used as the outputs of three independent non-linear dynamic subsystems. The datasets are Darwin Sea Level Pressure (DSLP), Santa Fe Laser (SFL) and Electricity demand (ED) [18]. These time series are non-linear and non-stationary. Five mixed signals are used to do experiments with different mixing matrix to verify the performance of the proposed method. The first mixed signals are
The second mixed signals are
The third mixed signals are
The fourth mixed signals are
The fifth mixed signals are
In the experiments, the last 190 data points of each time series in the mixed signals are used for doing prediction and others are used for training. Figure 1 shows us the performance comparison of the SVR prediction with separation or without separation of the second component in the second mixed signals. From Fig. 1, it can be found that the predicted series with the proposed method is closer to the real series than the predicted series without separation. That is to say, the SVR prediction with separation can get higher prediction accuracy and improve the predictability of the complex time series mixed by several series. Figure 2 shows us the prediction error evolution of the time series prediction with separation or without separation of the second component in the second mixed signals. From Fig. 2, it can be found that the prediction error with signal separation is significantly lower than the prediction error without signal separation. This also proves that the proposed prediction method can get much higher prediction accuracy and improve the predictability of the complex time series. The reason why the prediction performance of the proposed method is better is that the separated time series are much simpler and easier to be modeled than the original series. Higher prediction accuracy can be obtained for every separated time series. Higher prediction accuracy of original series can be expected with signal separation. In other words, some useful information for prediction is improved by signal separation.
Prediction performance comparison of the time series prediction with separation and without separation.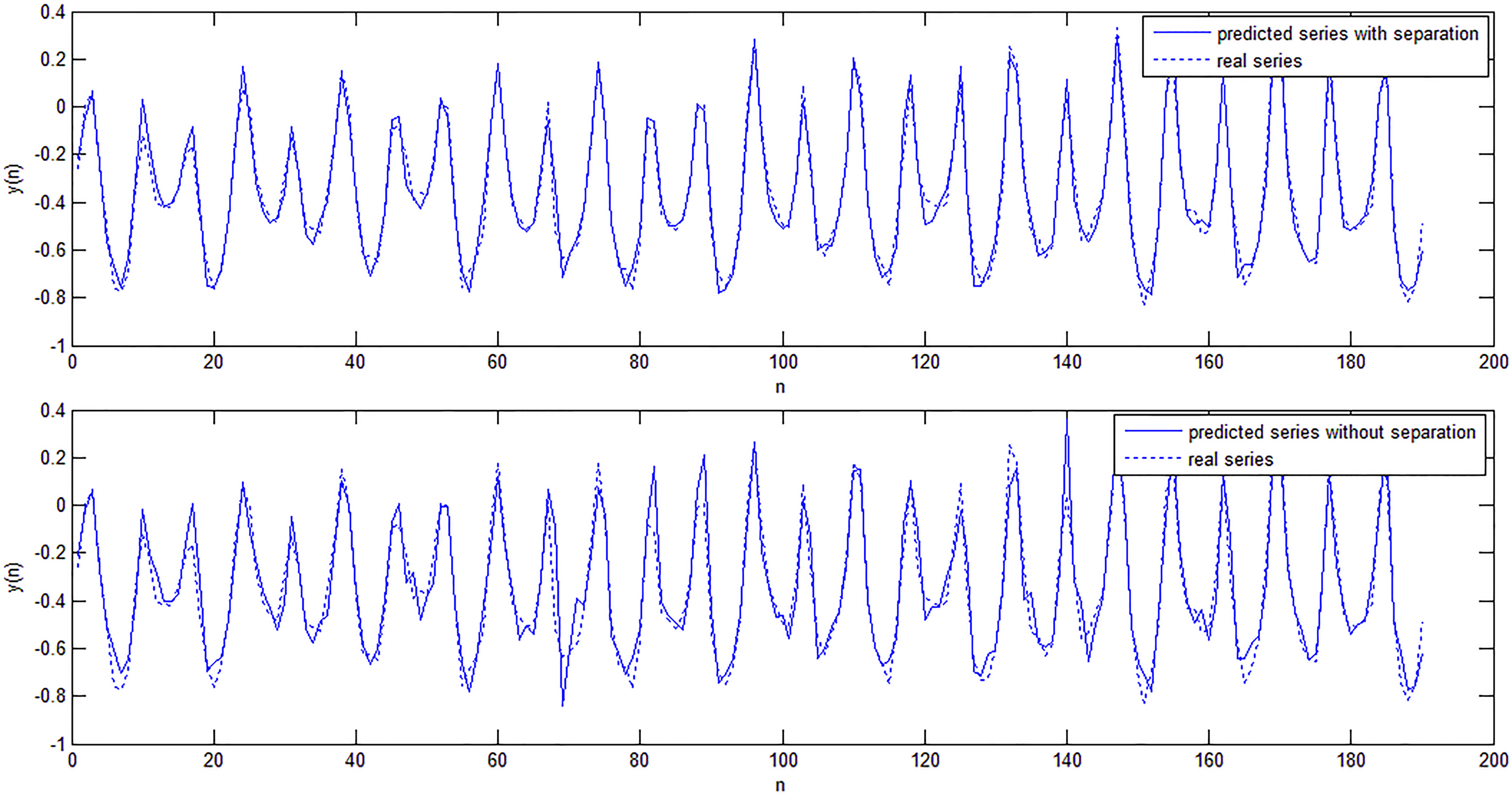
Error evolutions of the time series prediction with separation and without separation.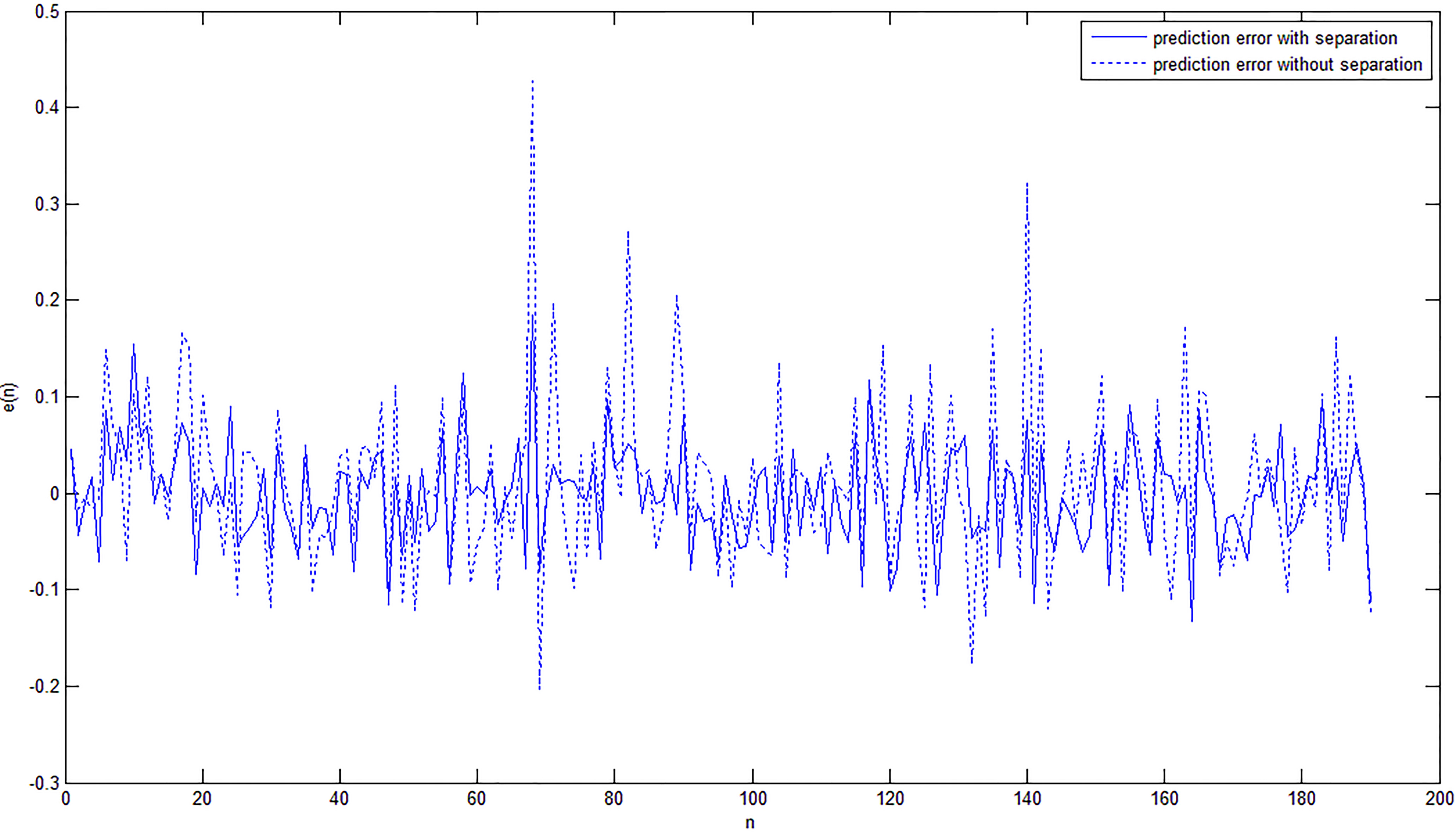
The prediction performance can be quantified by the Normalized Root Mean Square Error (NRMSE) and Mean Absolute Error (MAE) [17]. Table 1 shows us the MAE and NMRSE comparison of SVR prediction with or without separation. From Table 1, it can be found that both the MAE and NMRSE of the prediction with signal separation are lower than those of the prediction without signal separation. That is to say, the prediction accuracy with signal separation is much higher than the prediction accuracy without signal separation. These results verify that signal separation can improve the predictability of complex time series mixed with several time series substantially.
The prediction performance comparison of SVR prediction with or without signal separation
The prediction of the complex time series from complicated dynamic system is a challenging problem and still not resolved well, especially when the observed dynamic system includes several non-linear dynamic subsystems. In this paper, the signal separation technique and local prediction modeling are combined to do behavior prediction of complex non-linear dynamic system with multiple non-linear dynamic sub-systems. Firstly, signal separation algorithm is used to separate the observations in order to improve the predictability. Secondly, local support vector regression is trained with each separated independent component series. Finally, the prediction of the original observations is obtained by merging the prediction results of the separated independent component series with its local support vector regression. Experimental results show that prediction performance of the proposed method is much better than that of the prediction method without signal separation. So the proposed method is more qualified for behavior prediction of complex non-linear dynamic system.
Footnotes
Acknowledgments
This work is supported by the NSFC Breeding Program in Shantou University.