
Abstract
Shortcomings are found based on the research on existing analysis methods of degree of freedom of mechanism. Based on the relativity and consistency characters of mechanism motion, It is concluded that the dynamic and static platform as well as each branch chain of mechanism must own consistent moving elements. In view of the structure features of common parallel mechanism, the idea is proposed that RPR branch chain need be regarded as the basic branch chain of parallel mechanism configuration, the rotational motion element R is defined as three types, and three kinds of basic forms of basic branch chain
Introduction
Mechanism innovation is an important part of mechanical innovation, the degree of freedom should be the most basic understanding if you are to know any new structures, degree of freedom is also known as mobility. According to IFToMM standard, degree of freedom is defined as the number of independent parameters that is needed to define determine the types of mechanism or the kinematic chain, that also means degree of freedom is the number of independent parameters that required to define the position of all members of the mechanism or kinematic chain under a certain position. G-K formula [1, 2] is the traditional formula of the degree of freedom with a history of hundreds of years, the G-K formula has been used to recognize the degrees of freedom of almost all planar mechanisms and some spatial mechanisms, and it is only based on the most basic arithmetic operations. However, there are counter examples in history, in 1978 the United States Professor Suh et al. [3], in 1980 Shigley et al. [4], in 1984 Sandor [5], in 1987, Mabie et al. [6], in 1998 Eckhardt [7], in 1999, University of Maryland Professor Tsai [8], in 2000 Professor of France Merlet [9], in 2004 international famous scholar Waldron [10] pointed out that the G-K formula cannot be applied to all examples and cases in their books, so that this formula cannot be regarded as a general formula. In 1983, Professor Hunt pointed out in his paper that the parallel mechanism of 5 degrees of freedom which can work normally does not exist [11]. In 2000, Merlet also mentioned in his monograph [12], it is impossible to construct a symmetrical parallel mechanism with the degree of freedom as 4 and 5. In 2011, Professor Huang of Yanshan University published a monograph named General formula for the degree of freedom of mechanism which have been explored for 150 years [13], general revised formula presented in the book. The aforementioned methods had been adopted based on part of following parameters which include the physical elements of mechanism and the characteristics of the motion elements and the relationship of the whole motion elements and the relationship of the local motion elements. Because these factors are explicit or implicit, either structural factors or motion elements, once if the structure is complex and special, the structural elements and other dominant parameters are easy to determine, but for the implicit parameters, such as local or whole characteristics of the motion elements, it is not easy to determine, it will bring inconvenience for the analysis process.
The known theory and method didn’t distinguish the degree of freedom of input motion and degree of freedom of output motion, the relativity and consistency principle of fixed terminal and execution terminal of the mechanism was not considered, according to the relative principle of motion, the fixed terminal and the execution terminal exchanged, according to the consistence principle of motion, the common trajectory of the execution terminal in two cases must be the same. In view of the structure features of general parallel mechanism, the idea of using branch chain RPR as the basic chain form of parallel mechanism is proposed, the rotational motion element R is defined into three types, as well as three types of Hooke joint T/U defined by the same way. According to the principle of relativity and consistency of the dynamic platform and the static platform of parallel mechanism, the input and output degree of freedom of parallel mechanism constructed by at least three branch chains of RPR/TPR/TPT/ SPR/SPT/SPS based on the basic branch chain RPR is acquired, the scientificity and effectiveness of the method is verified by example.
Relativity and consistency of mechanism motion
It can be learned from the relativity of motion that the space motion of the same object has relativity, that is fixed terminal and execution terminal of mechanism can be exchanged without affecting the motion performance of output execution terminal in space.
From the perspective of consistency of motion, the dynamic and static platform of parallel mechanism connected by branch chains to form a new object, the relative motion of two platforms is consistent, the consistency of motion is generated by all consistent motion elements of branch chains, inconsistent motion elements of each branch chain have no influence on the common trajectory of output terminal.
The output terminal trajectory of parallel mechanism can be viewed as the intersection of trajectory set of output terminal of each composed branch chain, it is common to make use of computer software to analyze the working space of mechanism by the adoption of envelope method. According to the different installation position and direction in the fixed coordinate system of mechanism, corresponding definitions and approach presented after in-depth analysis begin with the single joint.
First type of rotation joint 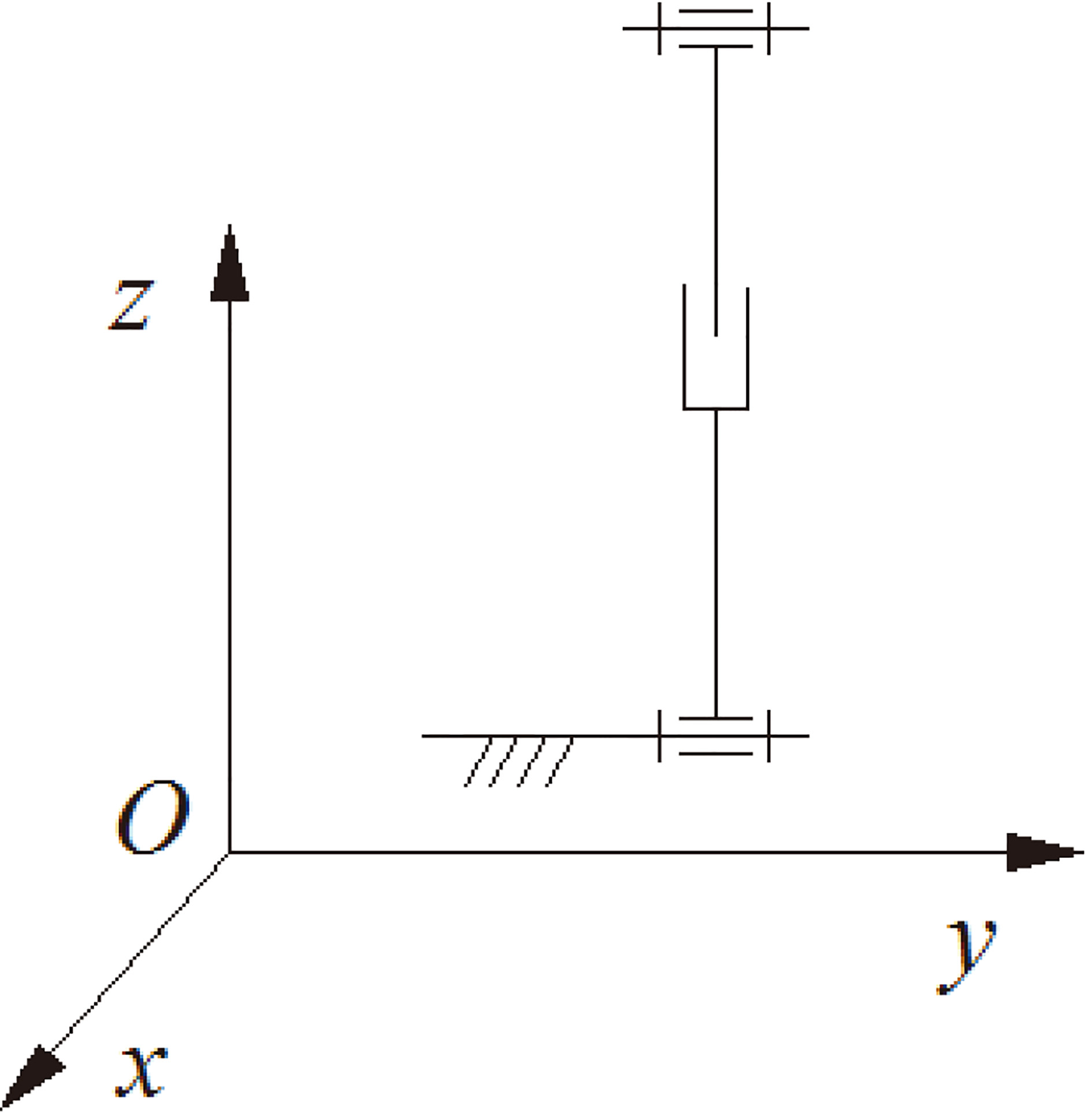
Second type of rotation joint 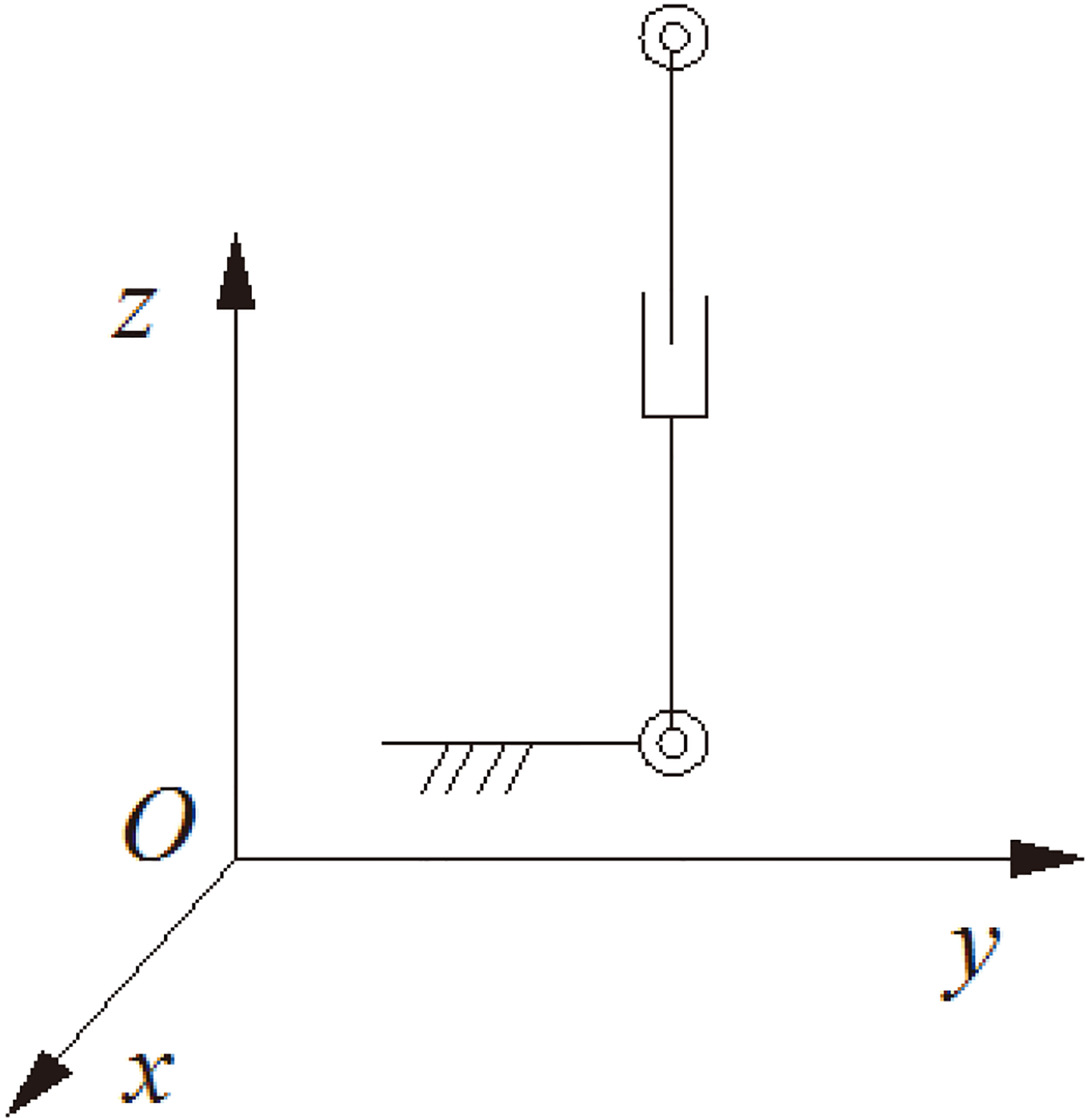
The rotation joint can move around the axis of fixed level to do upward or downward rotation, as shown in Fig. 1, this type of rotation is defined as the first type of rotation
Third type of rotation joint 
Based on the characteristics of three types of rotational joints
The first type of basic branch chain
As for other forms of branch chain, such as
Parallel mechanism is composed by M (M
The output terminal trajectory set may be line or circle(arc) or plane or curved surface or solid, species number of mathematical representation (line and circle) contained in trajectory collection is output degrees of freedom, output degree of freedom corresponding to line, circle(arc), plane, spherical, solid, is 1, 1, 3, 3, 6 respectively.
By adding rotation motion element to the rotation joint of the basic branch chain, the rotation joint R is changed into T joint, in the same way, the T joint is changed into S joint, this process is defined as method of motion elements added to basic branch chain. By means of this method, which combined with the output motion consistency of parallel mechanism constituted by motion chain, we can get the formula shown in Table 1. In all parallel mechanisms, we select the translation joint in each branch as its input motion element,
Degree of freedom of parallel mechanism based on method of motion elements added to basic branch chain
Degree of freedom of parallel mechanism based on method of motion elements added to basic branch chain
We can know from the formula in Table 1.
If Parallel mechanism or structure is formed by M (M If Parallel mechanism is formed by M (M If Parallel mechanism is formed by M (M If Parallel mechanism is formed by M (M
The following will take 3-RPR parallel mechanism as an example, by means of the basic branched chain motion element addition method, providing schematic diagram of parallel mechanism and its corresponding shape of common trajectory set of output terminal presented, the correctness of the formulas and conclusions given in Table 1 can be verified intuitively.
Figure 5 shows the common trajectory of output terminal of
Diagram of 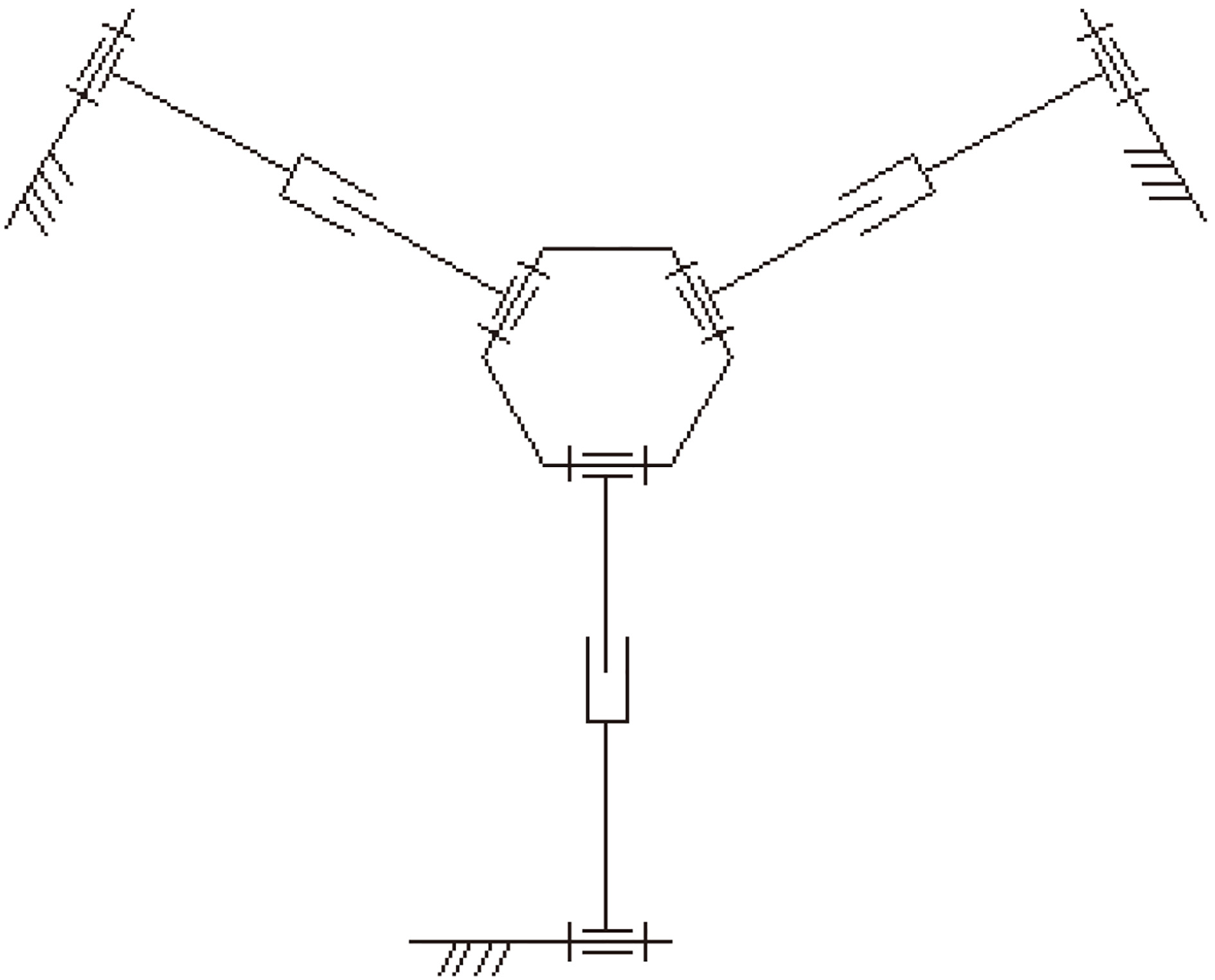
Planform of output terminal trajectory synthesis of 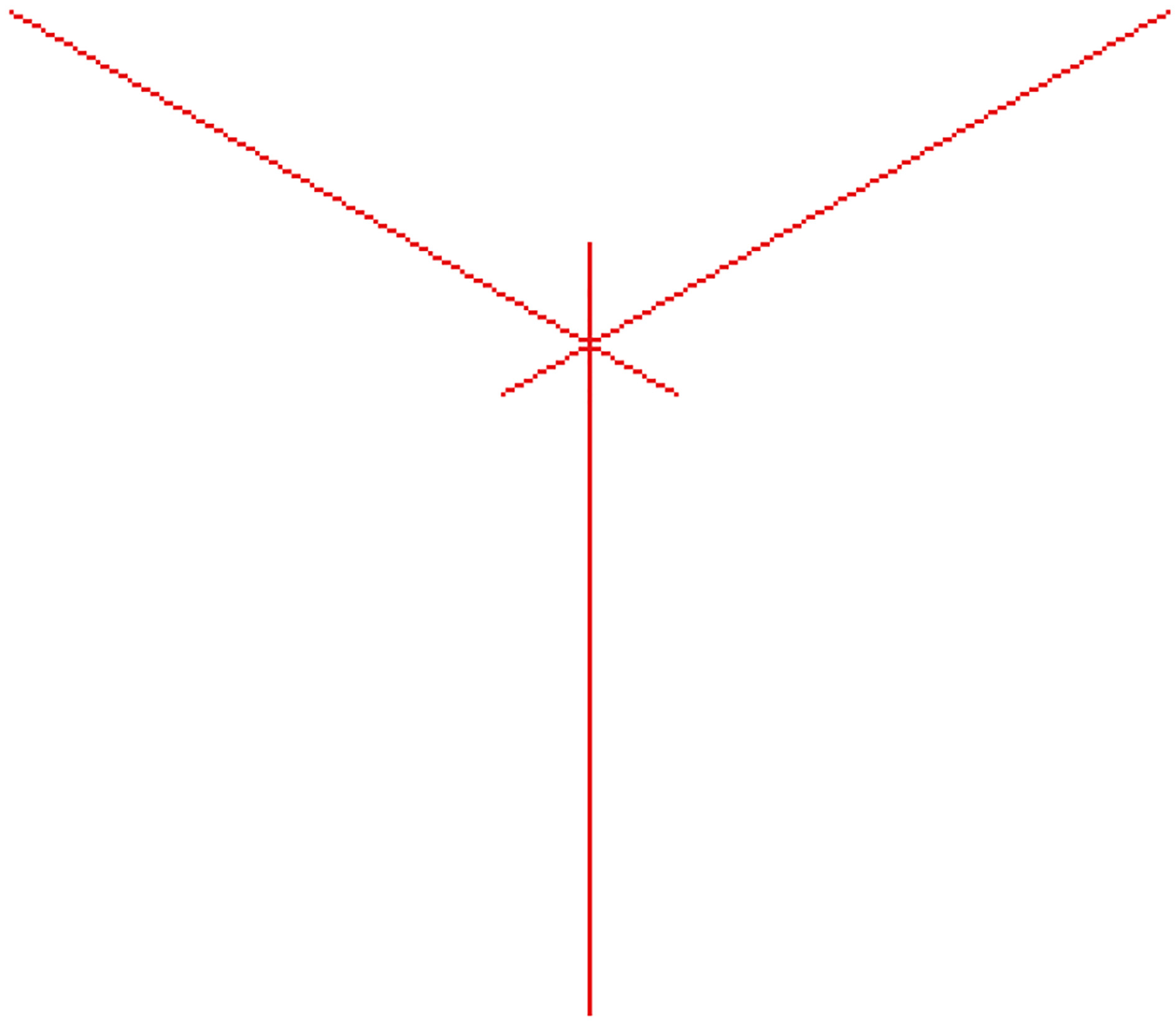
Figure 7 shows the common trajectory of output terminal of
In addition, according to the consistency of motion between the dynamic and the static platform, if there are no consistent motion elements between the branch chains connected them,
Diagram of 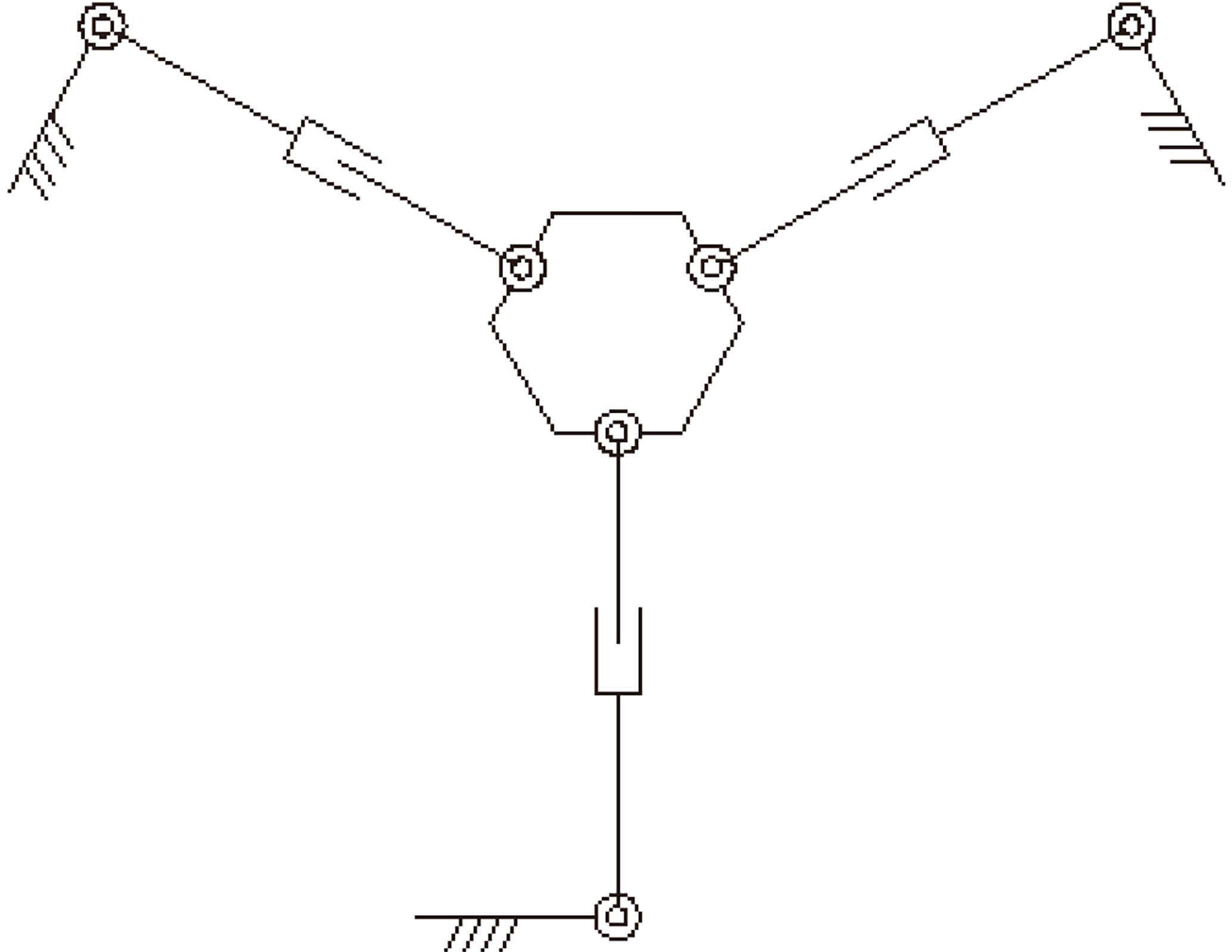
Planform of output terminal trajectory synthesis of 
Figure 8 shows the diagram of
Diagram of mechanism 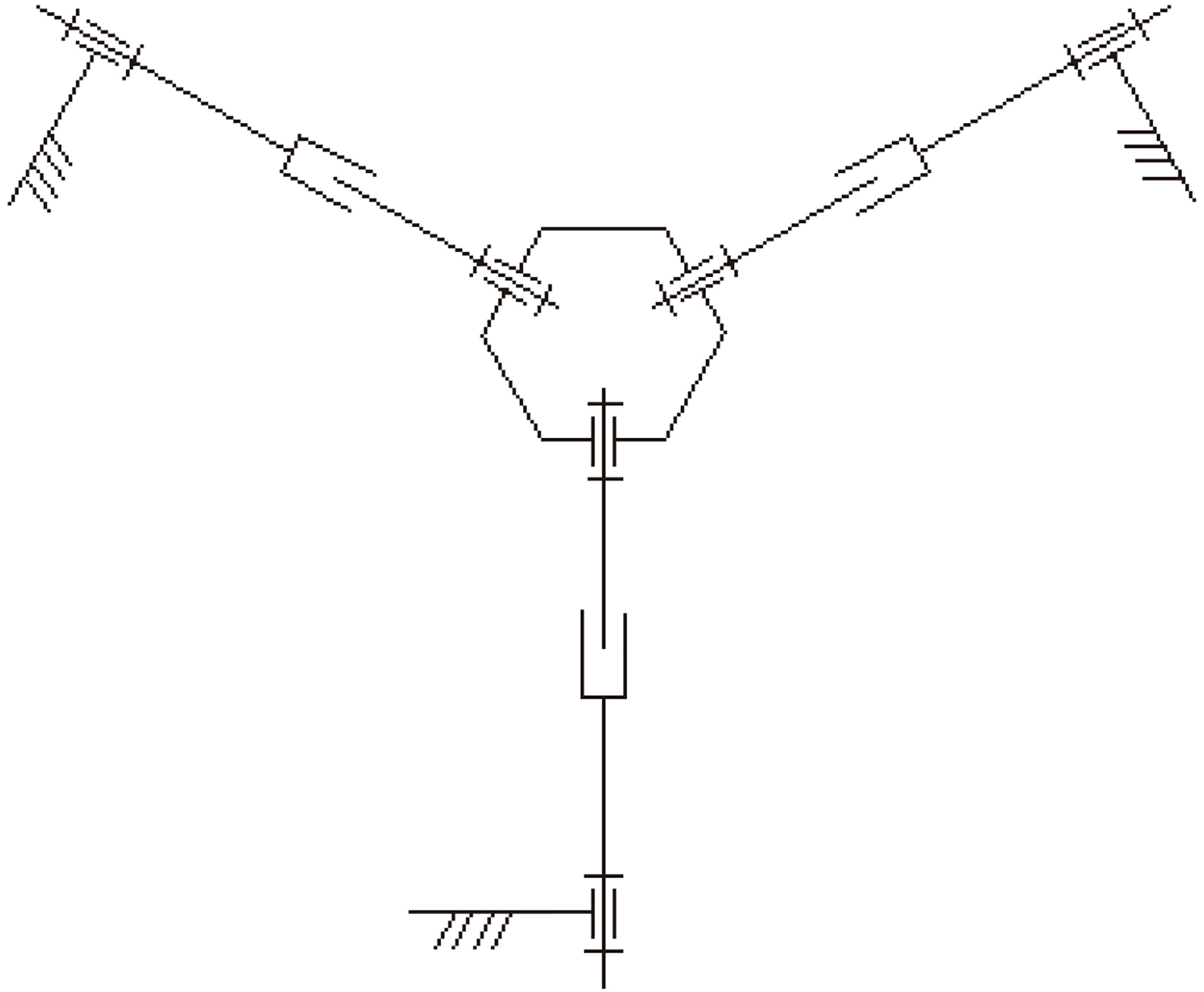
Planform of output terminal trajectory synthesis of 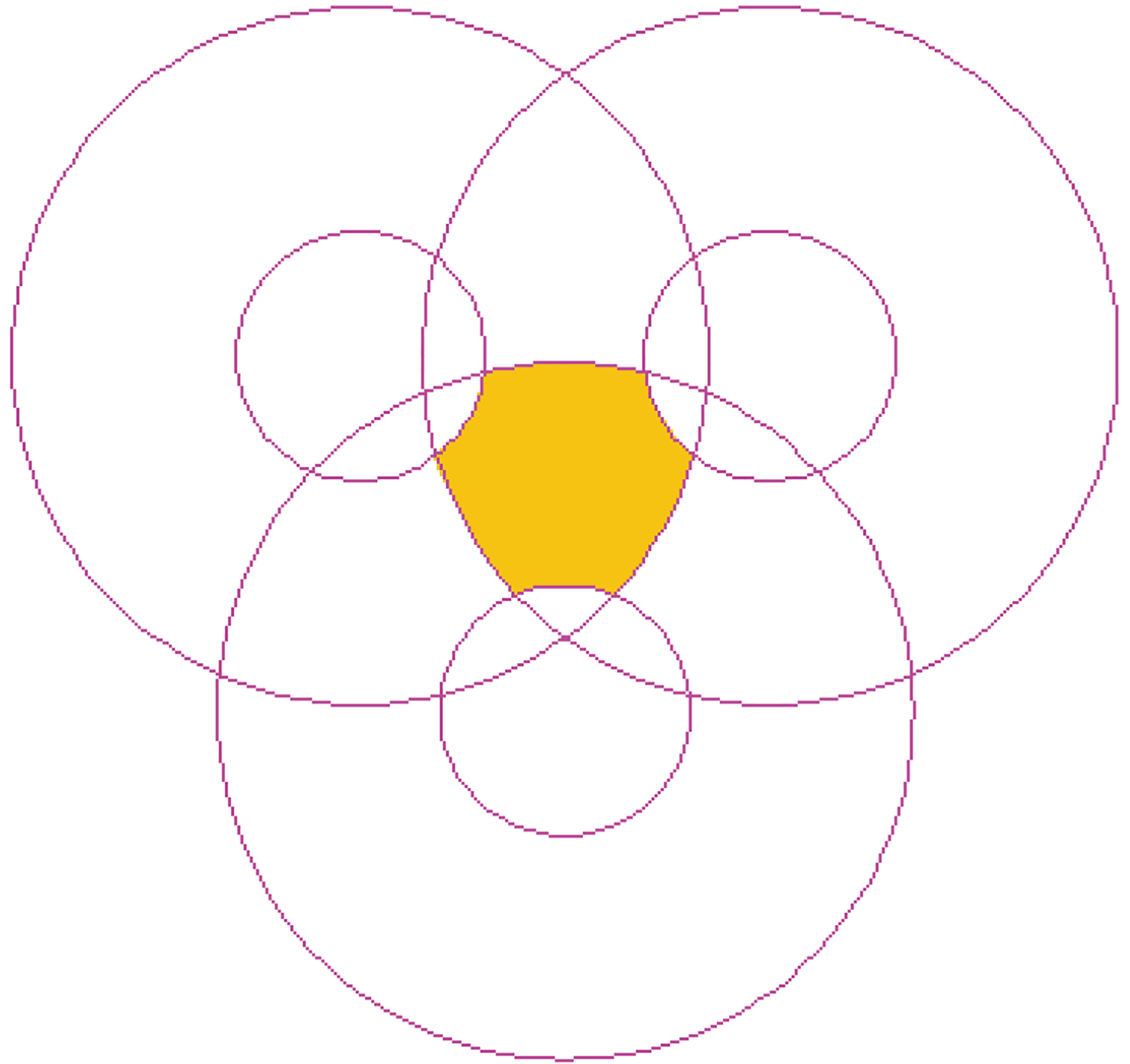
3-RPR, 3-TPR, 3-TPT, 3-SPT, 3-SPS mechanism represented with traditional method as shown in Figs 9 to 13, which failed to reflect the specific characteristics of branch chains, according to the method and conclusion in Table 1, it can be known that Fig. 9 shows the
Diagram of 3-RPR mechanism.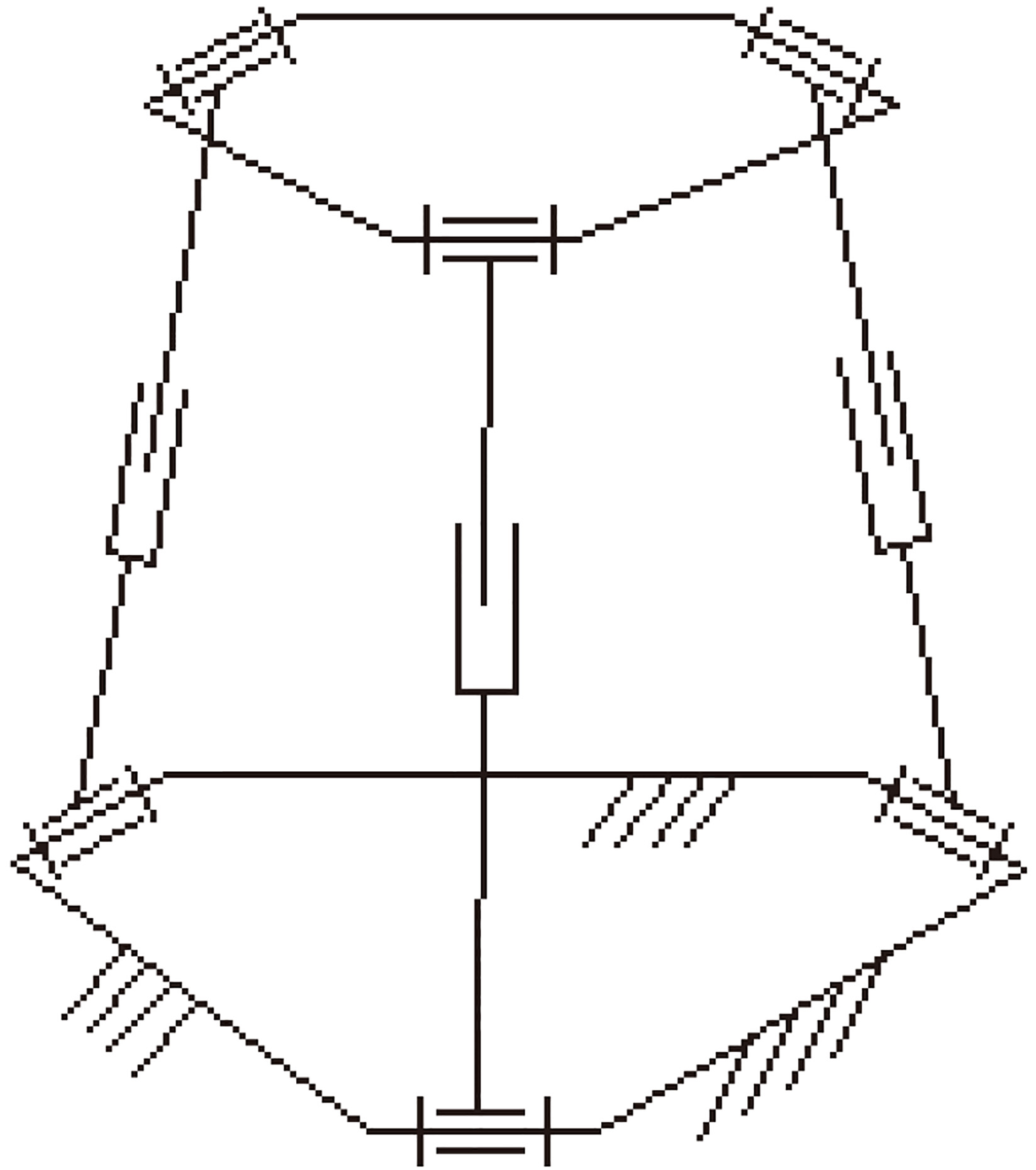
Diagram of 3-TPR mechanism.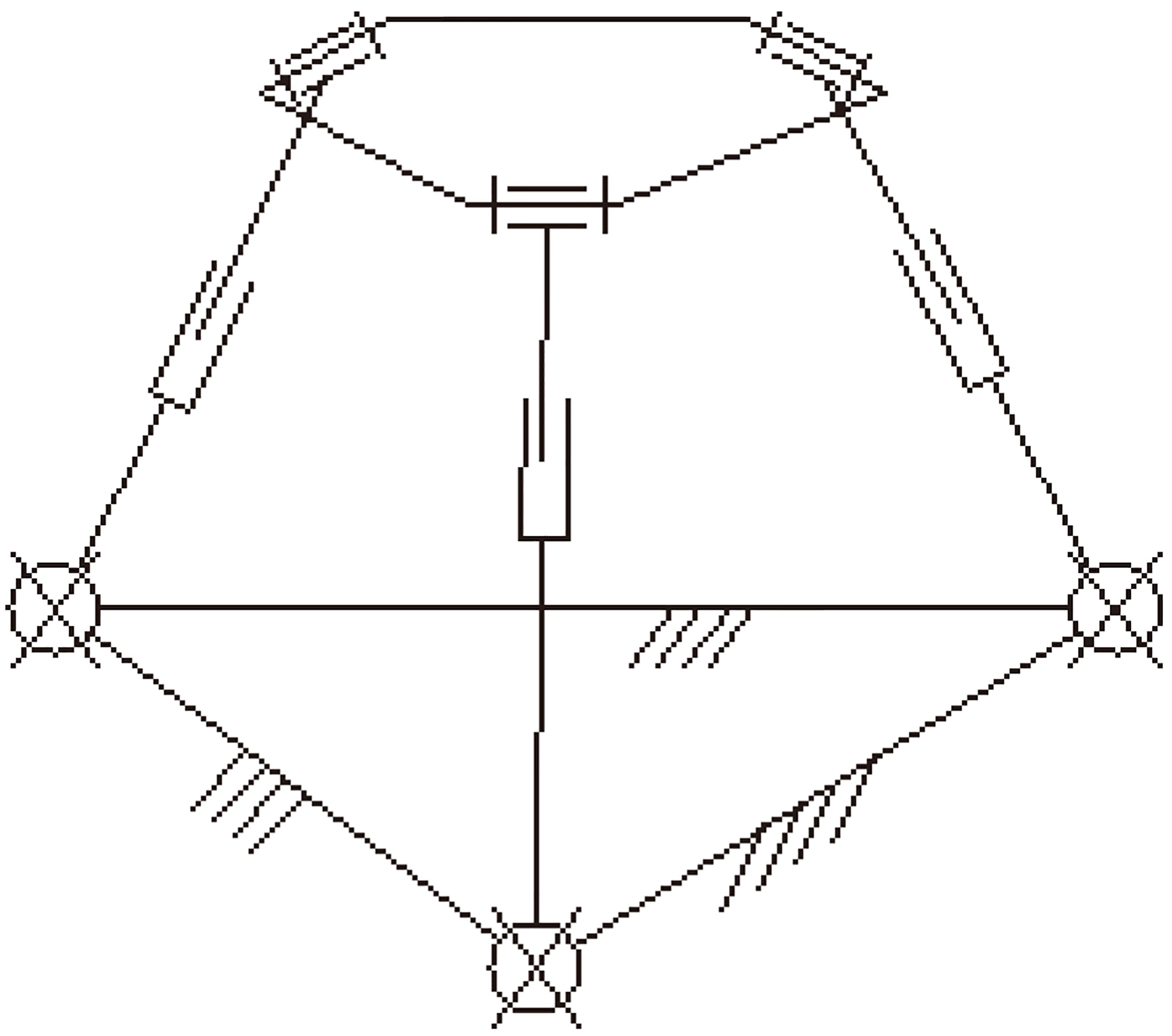
Diagram of 3-UPU mechanism.
Diagram of 3-SPU mechanism.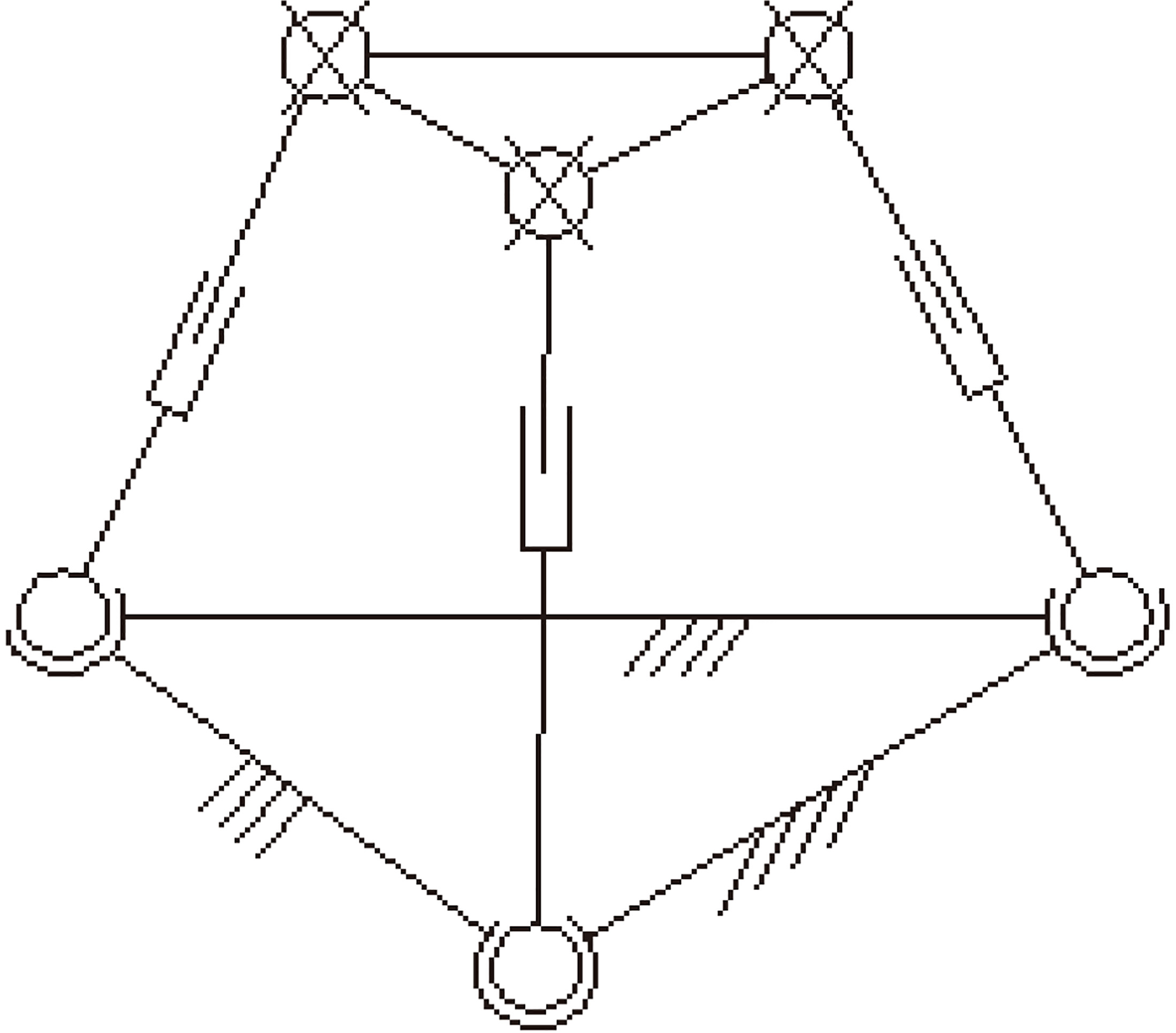
Diagram of 3-SPS mechanism.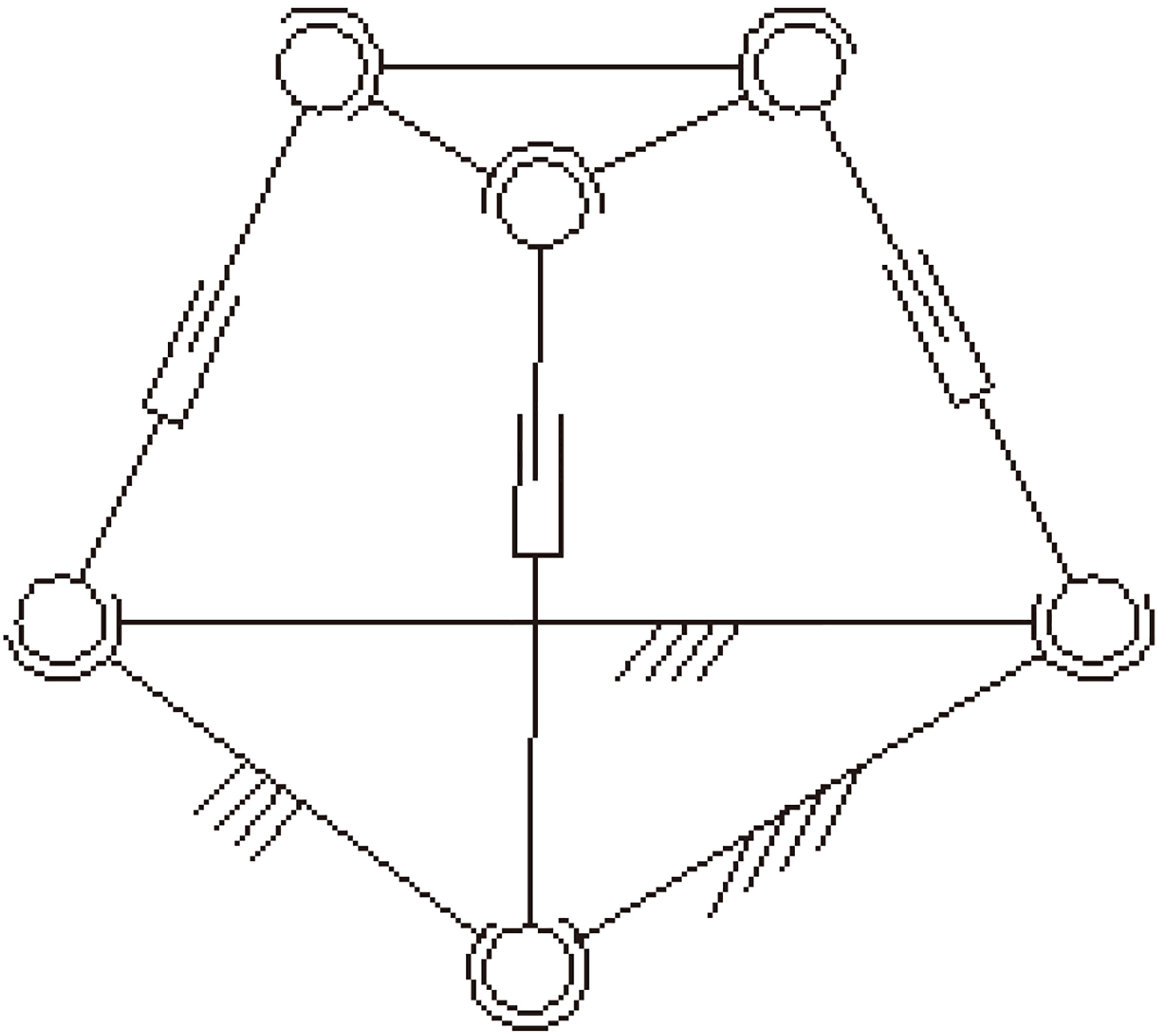
We can know from the above, accurate answer for degree of freedom can not always be found relying on the traditional diagram of mechanism and G-K formula or revised formula.
Except for Figs 10 and 14, other diagrams of mechanism shown in Figs 11–13 may express specific parallel mechanism with various forms of branch chain structure, the only exact answer can not be obtained then.
This method can be extended to 4-RPR parallel mechanism as shown in Fig. 15 and its stretched forms 4-TPR, 4-TPT, 4-SPR, 4-SPT, 4-SPS parallel mechanism, as well as 5-RPR parallel mechanism as shown in Fig. 16 and its stretched forms 5-TPR, 5-TPT, 5-SPR, 5-SPT, 5-SPS parallel mechanism, still 6-RPR parallel mechanism as shown in Fig. 17 and its stretched forms 6-TPR, 6-TPT, 6-SPR, 6-SPT, 6-SPS parallel mechanism.
Diagram of 4-RPR mechanism.
Diagram of 5-RPR mechanism.
Diagram of 6-RPR mechanism.
Professor Huang wrote in his book [13] that a company designed a 6-DOF motion simulator in 2007, it has been manufactured and installed in the workshop, as shown in Fig. 18, which has been running for a period of time in the laboratory. When my students observed it, they pointed out that the design of the freedom is not right immediately. It did not have six degree of freedom. The given conclusion is that the structure of the original 6-SPU is designed to 6-UPU structure. Here, the correctness of the conclusion is verified with the aforementioned method in this work.
6-DOF motion simulator.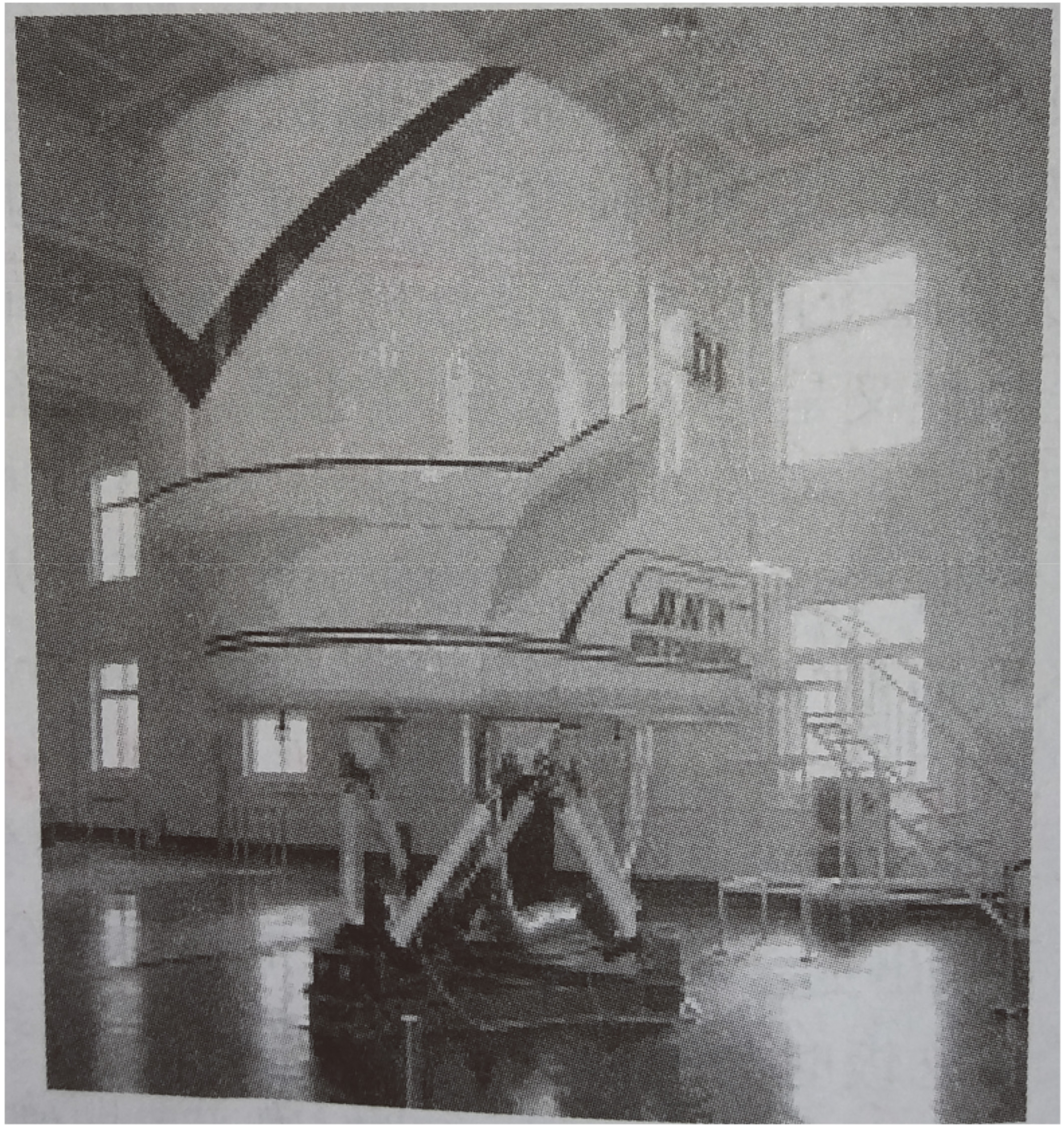
First of all, according to the formulas and conclusions shown in Table 1, combined with the above analysis of 3-RPR, 3-TPR, 3-TPT, 3-SPT, 3-SPS parallel mechanisms, we can get the planform of output terminal trajectory synthesis of 6-UPU (6-TPT), 6-SPU (6-SPT) parallel mechanism.
Planform of output terminal trajectory synthesis of 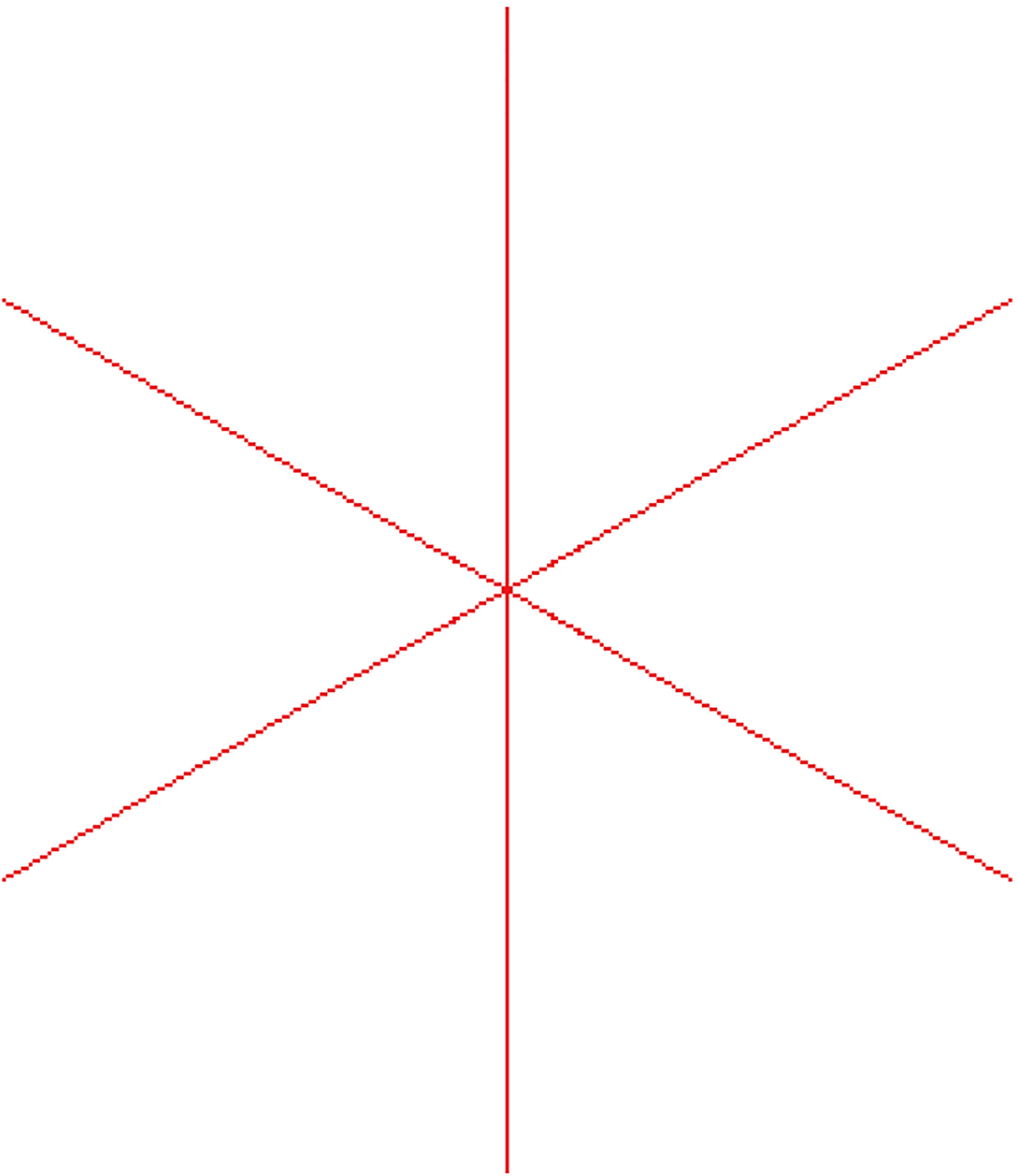
Planform of output terminal trajectory synthesis of 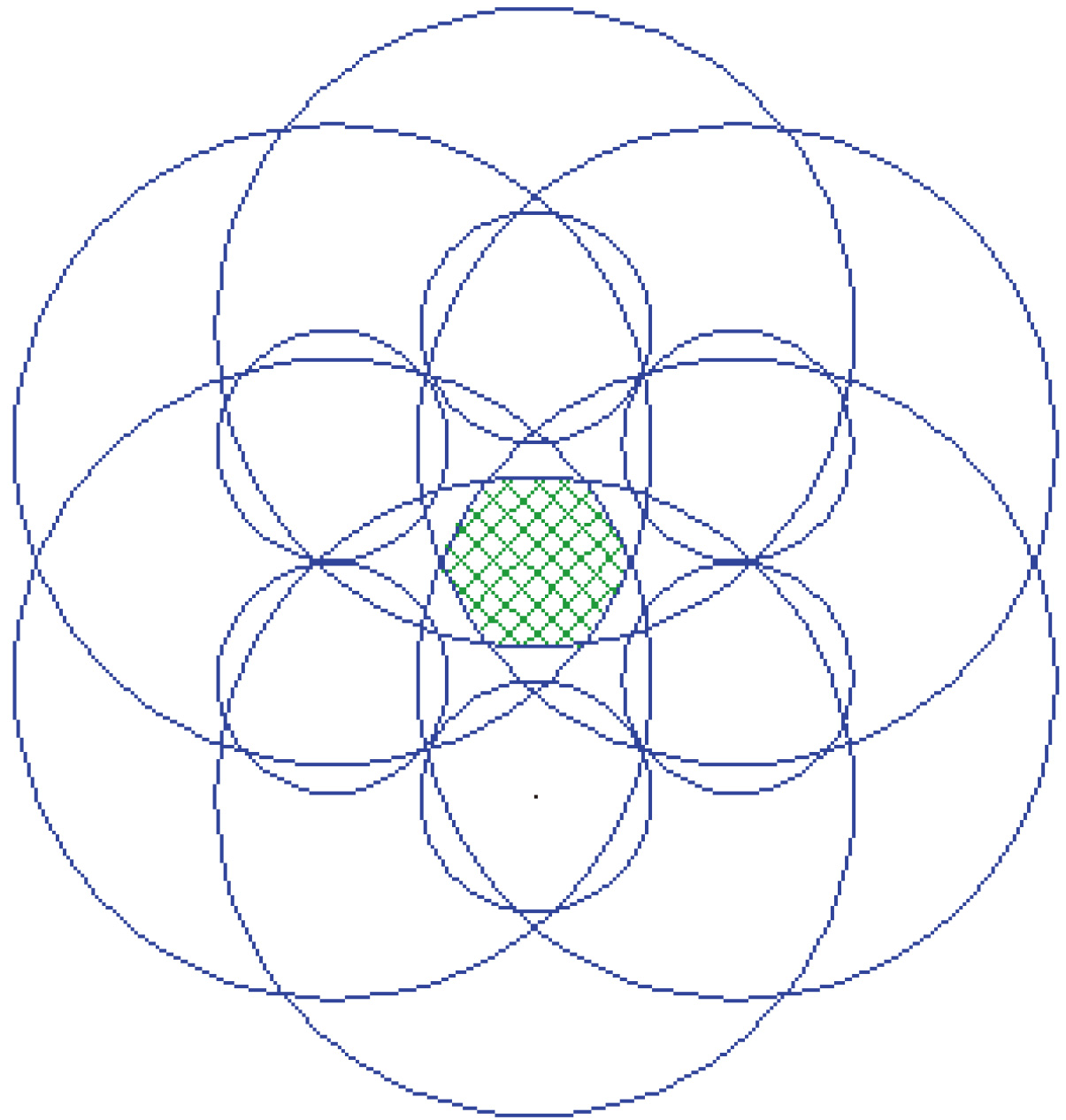
Planform of output terminal trajectory synthesis of 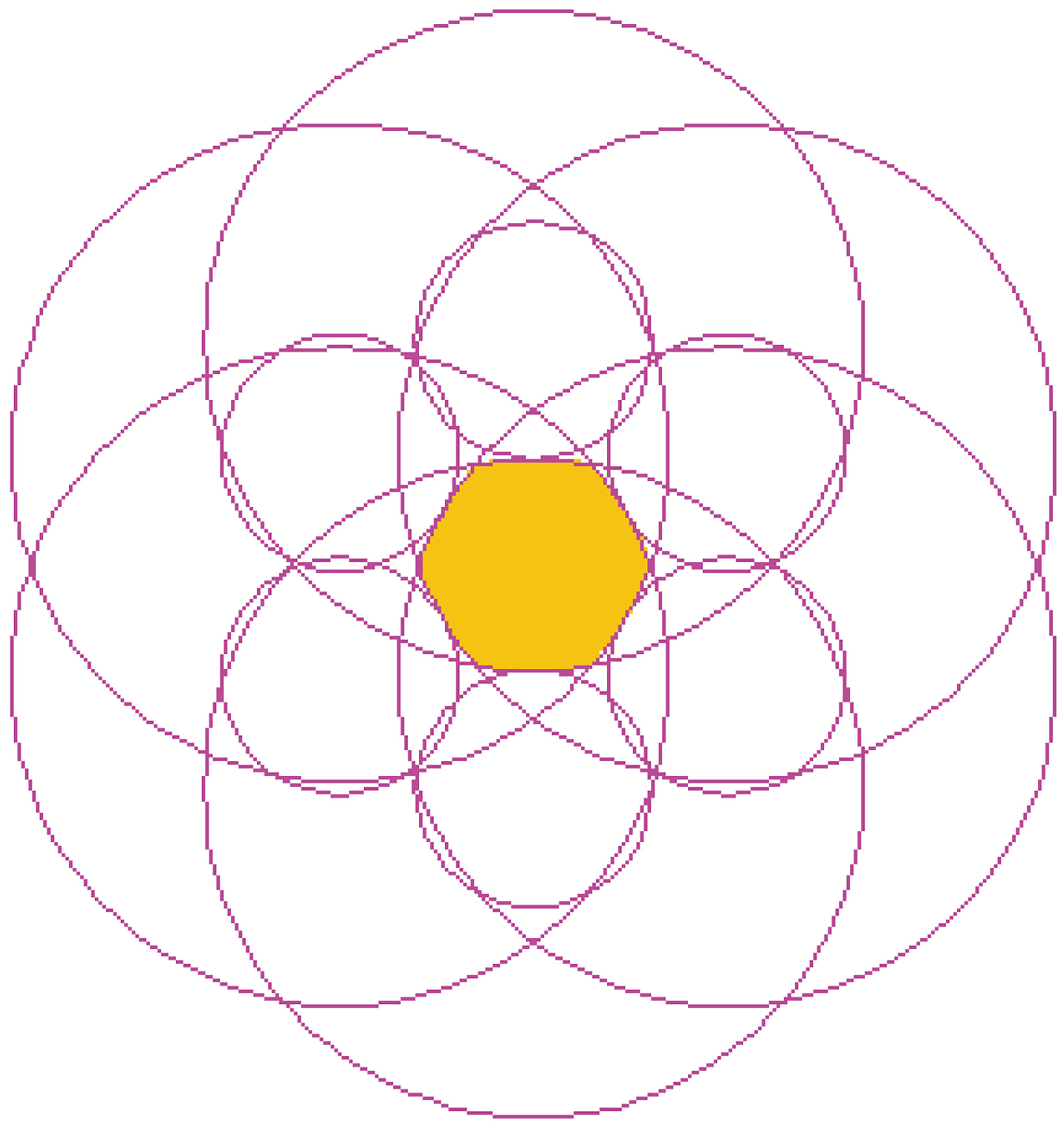
Secondly, planform of output terminal trajectory set of 6-TPT and 6-SPT parallel mechanism with different forms of branch chain structure obtained through in-deep analysis of Figs 19–21. Dimensionality of mathematical representation of output terminal motion elements in space found then,
Output degree of freedom of
From the above, the parallel mechanism with 6 output degree of freedom can be constructed into the form of
Shortcomings are found based on the research on existing analysis methods of degree of freedom of mechanism. According to the relativity and consistency of mechanism motion, new approach proposed by using RPR as the basic branch chain form of parallel mechanisms, and the R joint motion elements added method adopted, conclusions can be drawn as follows.
The existing calculation methods about the degree of freedom of parallel mechanism are based on parameters, which include the physical elements of mechanism and the characteristics of the motion elements and the relationship of the whole motion elements and the relationship of the local motion elements. Because these factors are explicit or implicit, either structural factors or motion elements, once if the structure is complex and special, the structural elements and other dominant parameters are easy to determine, but for the implicit parameters, such as local or whole characteristics of the motion elements, it is not easy to determine, it will bring inconvenience for the analysis process. The mechanism has the characteristic of motion relativity and consistency, the consistency of motion is generated by all consistent motion elements of branch chains, inconsistent motion elements of each branch chain have no influence on the common trajectory of output terminal. Based on definition of three types of rotation motion element R, three types of basic branch chain forms Input degree of freedom and output degree of freedom of parallel mechanism with at least three branch chains of the forms RPR/TPR/TPT/SPR/SPT/SPS obtained by using the equivalent formula. The scientificity and effectiveness of the method is verified by example.
Footnotes
Acknowledgments
This research was financially supported by the Hebei Province Science and Technology Foundation (QN2017410) and NCIST Foundation (No. 3142015023) .