
Abstract
In geomagnetic navigation, the estimation of vehicle’s location is only reliable when the matching method is used in some magnetic areas and directions. In order to evaluate the applicable directions, effective direction matching features (DMFs) play an important role. Aiming at this problem, a novel feature extraction method based on the slice lines of the magnetic surface is proposed. Firstly, the demerits of current feature extraction methods are analyzed. Secondly, principle of the proposed method is illustrated and a description system of the DMFs is established based on the slice features. Then in the view of pattern recognition, a BP neural network is trained to evaluate the direction navigability of a magnetic area. Finally, geomagnetic matching experiments are conducted to prove the validity of the slice features. Compared with the features obtained from the Gray Level Co-occurrence Matrix (GLCM), the proposed method is able to extract the features in any direction of the magnetic area and has a higher stability in classification as well.
Keywords
Introduction
Geomagnetic navigation is based on geographic information. It is passive and has no radiation. Most importantly, its location error doesn’t accumulate over time. As a result, geomagnetic navigation is considered an important supplement for inertial system (INS) [1, 2]. On the one hand, the INS provides a rough scale for geomagnetic navigation to confirm its search range of the matching algorithm. On the other hand, the matching results of the geomagnetic navigation can limit the drift of the INS which accumulates along with time. It has been proved that an accurate and real-time geomagnetic matching can be obtained in the magnetic fields with obvious features, rich magnetic information and good navigability [3]. Therefore, it is of great importance and significance to study the magnetic fields’ navigability.
In the view of pattern recognition, the problem of navigability analysis can be divided into two sub-problems: feature extraction and navigability evaluation. Scholars have discussed from different angles and some achievements have been made centered on the two problems. In 2006, Goldernberg [4] pointed out the availability of the magnetic field is different from one place to another and successfully estimated the navigability with several statistical parameters, such as the deviation and correlation radius of the magnetic field. Similarly, Lee and Kwon [5] noticed the importance of choosing an appropriate area for terrain aided navigation. Wang et al. [6] used variance and energy as the features to select a proper area for gravity aided navigation. As only one feature is not enough to evaluate the navigability of a magnetic field, Zhu et al. [7] proposed a comprehensive evaluation method with multiple features. These methods give the principles to find some suitable areas for geomagnetic navigation.
However, with the development of navigability analysis theory, the direction navigability problem is put forward [8]. As geomagnetic navigation is accomplished by matching the magnetic values measured by the magnetic sensor in a vehicle with the stored magnetic map, it is a one-dimensional matching. When the vehicle enters an area in different directions, the matching accuracy is different. It is closely related to the information of the magnetic area in that direction. Meanwhile, it is noted that the problem of direction navigability analysis also exists in other one-dimensional matching circumstances, such as terrain and gravity navigation. Currently, studies on this issue are scant and existed works still have some shortcomings to overcome.
The direction navigability is a property of the magnetic field itself, and it is determined by the magnetic features in that direction. Aiming at extracting effective DMFs for direction navigability analysis (DNA), a novel method is proposed in this paper. By generating a cluster of planes in a given direction and calculating the slice lines between these planes and the magnetic surface, the statistical features in the given direction can be obtained. The paper is organized as follows. The related work is reviewed in Section 2. After that, principle of the proposed method is detailed in Section 3. In Section 4, the DNA model is established. The results of confirmatory and comparative experiments are presented in Section 5. Finally, important conclusions are drawn in Section 6.
Related works
Strictly speaking, navigability of a magnetic area presents the “mean” matching suitability in all directions for geomagnetic navigation, while the direction navigability describes the matching suitability in different directions.
At present, methods to extract features to analyze the direction navigability are usually based on statistics or direction filter. For example, with the DMFs extracted from the GLCM of the magnetic field, Zhao et al. [9] preliminarily builds the rules to choose a suitable direction. Wang et al. [10, 11] established a layered decision-making model with the GLCM features and the DMFs extracted by the Gabor filters in four given directions.
GLCM is first proposed by Haralick and Shapiro in the 1970s [12], and it is a statistical method that describes the grayscale’s correlation from a scaled version of the image. GLCM calculats how often a pixel (
where
GLCM is not directly used to describe the original image. Usually, some statistical features extracted from the GLCM are taken as the DMFs. Table 1 concluded several common features based on GLCM [13, 14].
Here energy measures the texture’s uniformity and roughness of an image. If the gray levels are uniformly distributed, that is all elements of a GLCM are close to each other, then the energy is nearly 0. Contrast is the inertia moment of the GLCM near its leading diagonal, measuring the sharpness of an image; correlation measures the similarity in row or column of an image; and homogeneity describes the closeness between the elements of a GLCM and its diagonal elements. In the formulas,
Several DMFs extracted from GLCM
For an image, the GLCM can measure its correlation in space, but when it is used in geomagnetic navigation, there are some shortcomings to overcome. First, the GLCM is based on statistic theory and some local features can’t be completely reflected. Second, the magnetic matching is within a small magnetic field, in which the available data is limited. The parameter
Gabor filter is capable of direction selection and has good resolution both in space and frequency domain [16, 17]. If proper parameters are chosen, the filter response in arbitrary direction is obtained. And on basis of it, the DMFs for geomagnetic navigation can be extracted. However, versatile parameters of the Gabor filter make it very complicated to design the filter [18]. Currently, there are no general ways to solve the problem and specific issues should be analyzed in practice.
In order to overcome the shortcomings mentioned above, a novel DMF extraction method based on the slice lines of a magnetic field’s surface is proposed, which can be used to extract the features in any direction of the magnetic field. Meanwhile, the method hasn’t so many parameters to adjust and is easy to realize.
A local magnetic anomaly field.
Establishment of local magnetic model with high accuracy
Local magnetic model with high accuracy is the foundation to analyze the direction navigability. NGDC-720 is a world’s magnetic anomaly field model released by the USA’s National Oceanic and Atmospheric Administration (NOAA) [19]. Resolution of the model is about several kilometers, which is not applicable for geomagnetic navigation. In this case, some interpolation methods are usually taken to establish an accurate local magnetic model. Among these interpolation methods, the Kriging method is a local spatial interpolation method and has been widely used to establish a magnetic model.
We choose an area from the Y component of the NGDC-720 model, which is within the longitude of [34
Basic principle to extract the DMFs
In order to overcome the shortcomings of GLCM and make it easier to realize, a novel method to extract the DMFs for DNA is proposed. The main idea is shown in Fig. 2.
Suppose the magnetic field of a small area is:
where (
As is shown, note
where
Schematic diagram of DMF extraction method.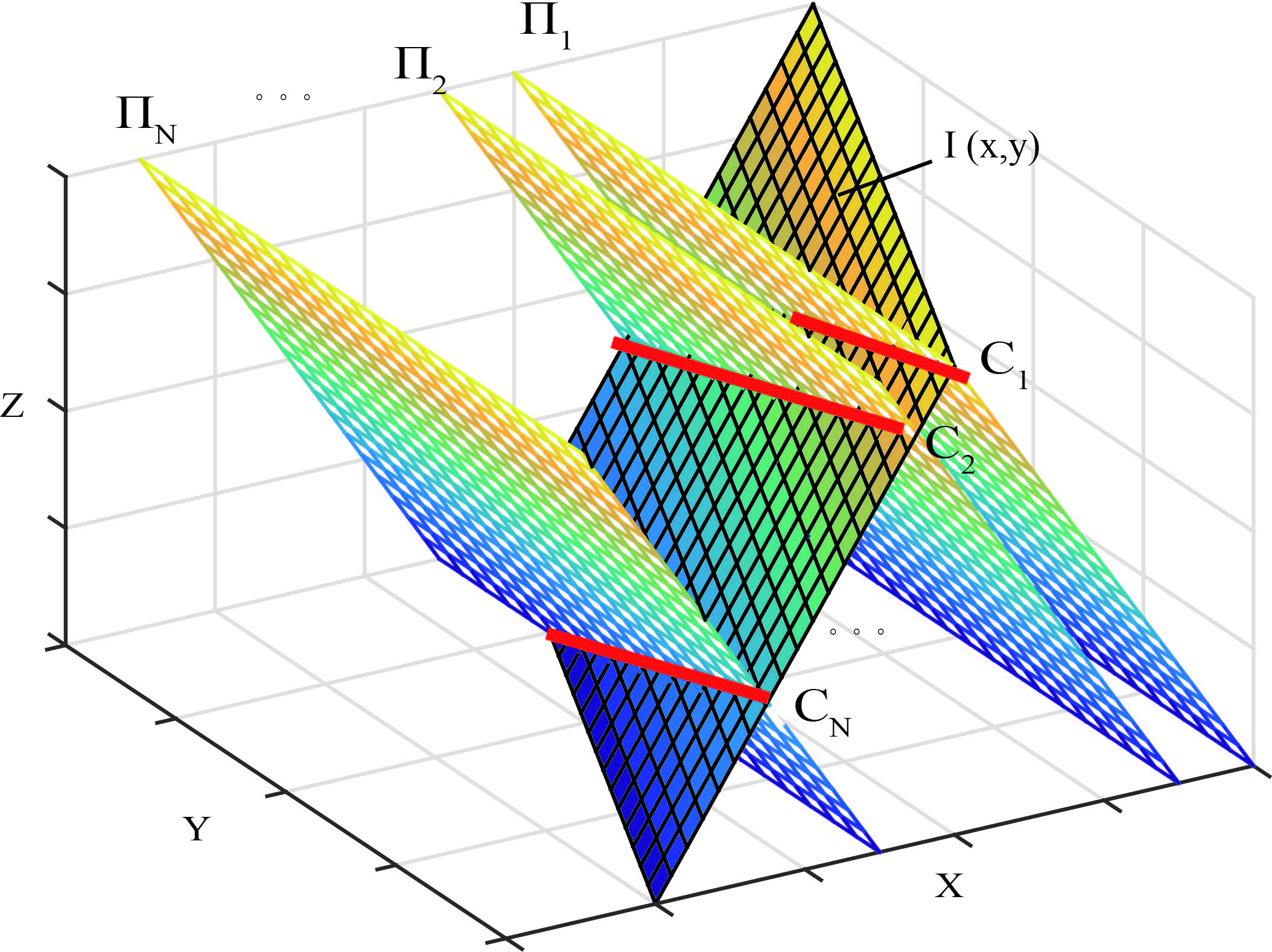
Use plane
However, it should be noted that only one slice line is not enough to represent the whole information of the magnetic field in a direction, a number of slice lines are needed to give a complete expression of the direction information. So consider the vehicle enters the area from other positions, noting as
In this section, a slice line in direction
Mean value
where Ratio of variance and mean value
Kurtosis coefficient
Skewness coefficient
Information entropy
where
. Variation entropy of magnetic field
where
Features of other slice lines can be obtained following the same steps. And they together make up the slice features in direction
Evaluation criteria of the direction navigability
Generally, the matching probability is taken as the index to evaluate the navigability of an area [20]. It reflects the matching result’s reliability when the vehicle is located in that area. The matching probability can be calculated by simulation experiments. In this paper, we use the idea that computes the matching probability of an area to calculate the matching probability in different directions: fix a direction
where
In practice, evaluating whether a given direction is suitable to match, i.e. whether the given direction can provide reliable location for the vehicle, is more meaningful than giving the precise correct matching probability. In this sense, the DNA for geomagnetic navigation can be regarded as a classification problem. In the paper, the directions are divided into two categories according to their matching probabilities: if
In this section, a BP network with good generalization ability is used to build the direction navigability evaluation model. First, we divide the local magnetic anomaly field in Section 3 into numbers of rectangular areas with the size of 20
Extract the DMFs. Randomly select a number of candidates and choose Appoint category labels for each direction of all candidates according to their direction matching probabilities. Select proper structure for the BP neural network (BPNN). According to the dimension of the slice features and the category labels, the input and output nodes of BPNN are set to 133 and 1. A two-hidden-layer of 50 Select samples to train and test the BPNN. By times of supervised learning, a DNA model for geomagnetic navigation is established.
Once the DNA model is built and the extracted DMFs are input, the model will predict whether a direction of a magnetic area is suitable to provide a reliable matching result for the vehicle. In Section 5.1, geomagnetic matching experiments will prove the validity of the proposed method.
As the initial weights of the BPNN are randomly set, we train and test the BPNN for 50 times and select the network with the best performance as the final model for DNA. Meanwhile, the classification accuracy of each time is recorded to evaluate the stability of the slice features. In the paper, three kinds of classification accuracies, namely one category accuracy (CA), the average accuracy (AA) and the overall accuracy (OA) are introduced, as is in Eqs (18)–(20):
where
Geomagnetic matching experiments
In order to prove the validity of the slice features, we randomly select 400 candidates from the local magnetic anomaly model in 3.1 and choose six representative directions, namely 0
In Table 2, output “1” means the corresponding direction is suitable for geomagnetic navigation and “0” is unsuitable. In order to test the predicted results, simulated matching experiments are conducted in six directions of the four candidates. The matching algorithm is the Terrain Contour Matching (TERCOM). Figure 4 and Table 3 show the matching results and location errors. Due to space limitations, the matching results of Candidate 1 in 30
Predicted direction navigability of four candidates
Predicted direction navigability of four candidates
Location errors of the four candidates (Unit: m)
3-D views of four candidates.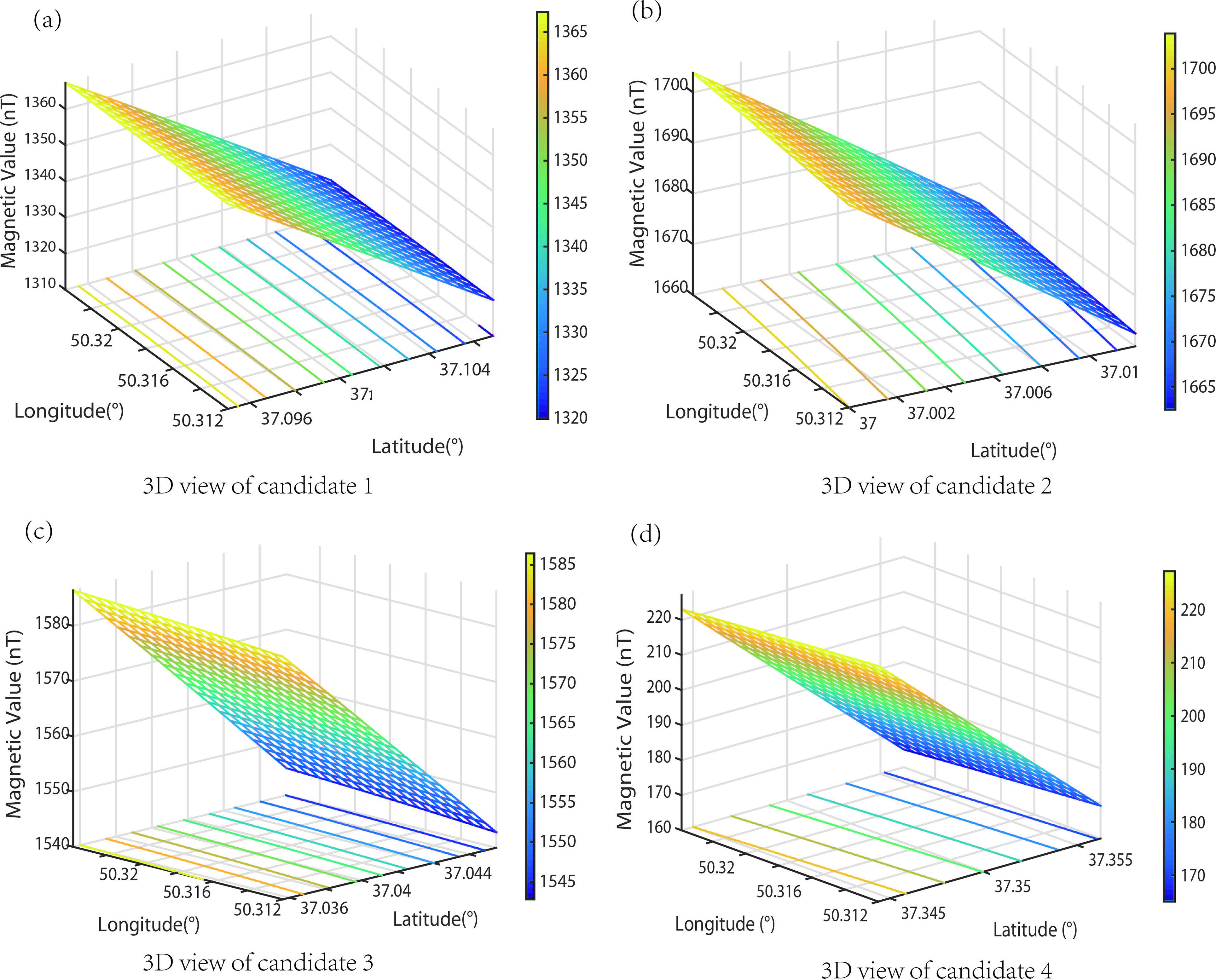
Matching results of four candidates in six directions.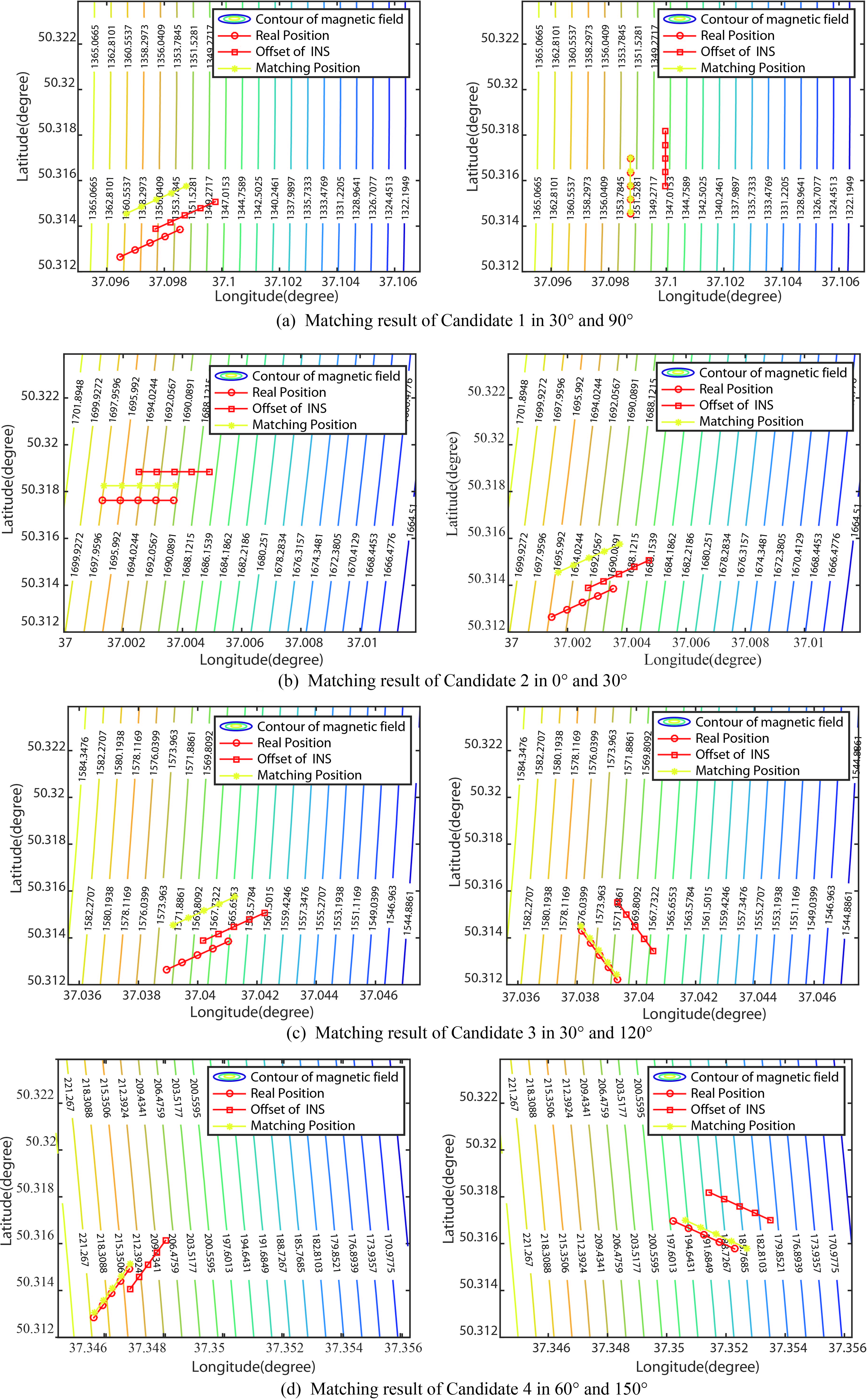
In Table 3, the location errors of Candidate 1 in 90
As is mentioned, the GLCM features cannot extract the features in arbitrary angle, and 0
It should be noted, as the dimensions of the slice features and GLCM features differ, the input nodes of BPNN are different. According to Table 1, the GLCM features in a direction contain 4 statistic parameters, so the input nodes of GLCM model are 4. Structure of the slice model and other parameters of the GLCM model are the same as it is in Section 4.2. Figures 5 and 6 show test samples’ prediction navigability categories and their real navigability categories.
Classification accuracies of two features
Classification accuracies of two features
Classification results of GCLM features.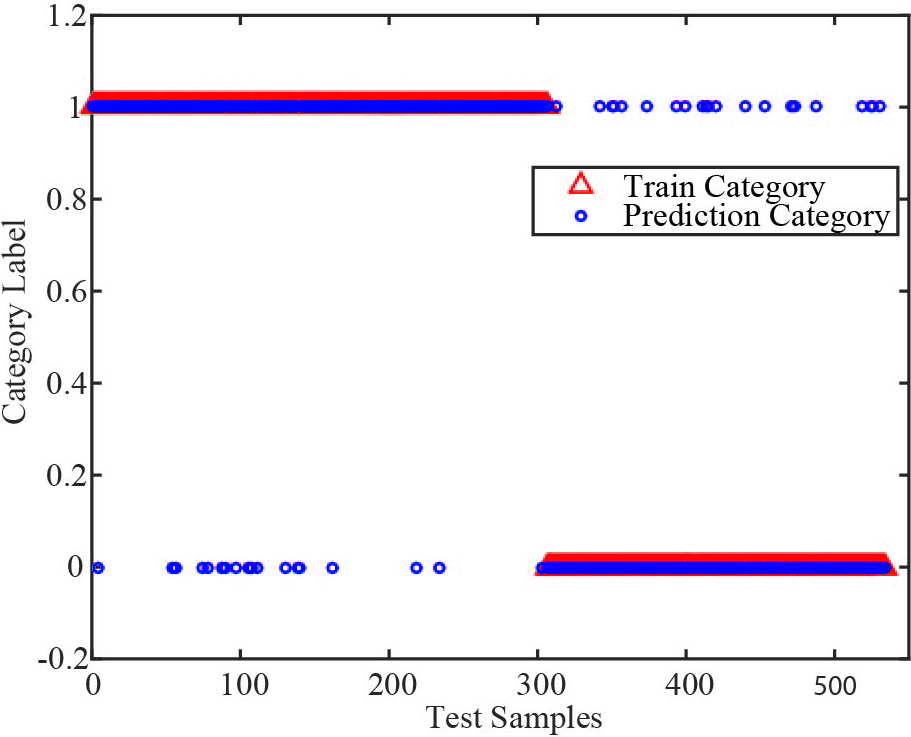
Classification results of slice features.
Obviously, though a few exceptions exist, most test samples are correctly classified, their prediction results are consistent with their matching experiments’ results. In Table 4, the classification accuracies of the slice features and the GLCM features are calculated according to their definitions in Section 4.2.
As is shown, the overall classification accuracies (OA) of the slice features and GLCM features respectively are 85.77% and 85.30%, proving they are both effective to predict the direction navigability. On the other hand, the classification accuracy within category “1” (CA
Divide the OA of 50 times of BPNN’s training into three scales: [0, 70%), [70%, 80%) and [80%, 90%], and record the times they appear in each scale. Results show there are 23 times that the GLCM features’ OAs are below 80% and 12 times below 70%. While there are only 2 times that the slice features’ OAs are below 80%, other OAs are all above 80%. It means the slice features have better stability than the GLCM features when they are used to analyze the direction navigability for geomagnetic navigation.
To sum up, the following conclusions can be drawn: (1) The feature extraction method based on the slice lines is feasible and effective. (2) The slice features have better stability than the GLCM features for direction navigability analysis. (3) The GLCM method cannot extract features in any direction of the magnetic area, while the proposed method can. (4) The proposed method has less parameters to be adjusted than the Gabor filter, which simplifies the procedures to extract DMFs. In further study, the proposed DMF extraction method can be combined with the Gabor filter to improve the model’s prediction accuracy and lay the foundation for geomagnetic navigation.