
Abstract
Most of global navigation satellite systems (GNSS) are transmitting three or even more frequency signals. Narrow lane combinations of these multi-frequency observations are characterized by short wave length, high precision and have been widely used in positioning and orientating. In this work, the optimal narrow lane combinations were theoretically investigated to improve the solution precision. To this end, the basic multi-frequency linear combination model was introduced and two key factors (i.e. noise factor and lane number) were defined. On this basis, two parameters SPI (Solution Precision Indicator) and SPI
Introduction
Most of global navigation satellite systems (GNSS) are transmitting three or even more frequency signals. BeiDou Navigation Satellite System (BDS) developed by China started its regional services in 2012 and provides signals centered at B1 (1561.09 MHz), B2 (1207.14 MHz) and B3 (1268.52 MHz). Besides the previous L1 (1575.42 MHz) and L2 (1227.6 MHz) frequency, GPS now provides a third frequency L5 (1176.45 MHz). And Galileo system can provide five frequency signals centered at E1 (1575.42 MHz), E2 (1561.1 MHz), E5A (1176.45 MHz), E5B (1207.14 Mhz) and E6 (1278.75 MHz) respectively.
Linear combinations of these multi-frequency observations have been used for various purposes. According to Cocard et al. [1], three groups of combinations can be distinguished: wide lane region, intermediate lane region and narrow lane region. Wide lane and intermediate lane combinations are usually used in ambiguity resolution. Narrow lane combinations are always used to increase positioning or orientating precision after ambiguity parameters have been fixed. Lots of investigations have been conducted on linear combinations of multi-frequency observation in the near decade. Most of them focused on combinations in wide lane region. For example, Neumann et al. [2] showed that dual-frequency narrow lane combinations are capable of mitigating multipath and noise. Cocard and Geiger [3] and Collins [4] described an approach which could be used to search optimal dual-frequency wide lane carrier phase combinations. Han and Rizos [5] developed long wave lengths but low noise linear combinations which were suitable for ambiguity resolution. Teunissen and Odijk [6] and Odijk [7] mainly focused on the ionosphere-free combinations that three frequency can provide and have shown that three frequency observations can lead to much more possible combinations. Feng [8] developed three frequency optimal combinations under three criteria: long wavelength, reduced ionosphere delay, and low combination noise. The combinations were used in geometry-based ambiguity resolution. In order to satisfy the demands of bootstrapping method, Cocard [1] derived rigorous mathematical equations for gaining optimal combinations of three frequency observations. The triple frequency optimal combinations of GLONASS was investigated by Xu et al. [9]. And they were investigated based on principles such as long wavelength, less ionosphere delay and low observation noise. Zhang and He [10] investigated the models and characteristics of BDS triple-frequency carrier phase linear combinations, and developed three categories of combinations: ionosphere free, troposphere free and minimum noise. Li et al. [11] conducted an analytical study on three carrier phase combinations, and presented a general analytical method for solving the optimal integer linear combinations which were used in cycle slip detection and ambiguity resolution.
Through the introduction above, we see that most of the investigations concentrate on the optimal combinations that have long wave length, less ionosphere delay, less troposphere delay and low noise. These combinations are mainly developed for resolving ambiguities and are studied based on their characteristics not on the solution precision. Investigations of optimal narrow lane combinations suitable for positioning and orientating are few and not systematic. In this contribution, we presented a systematic investigation of the optimal narrow lane combinations after ambiguity parameters have been fixed. The basic multi-frequency linear combination model was first introduced and the definitions of noise factor and lane number were defined. Then SPI and SPI
The optimal narrow lane combinations
The basic linear combination model
The following observation equation of carrier phase will be used
Where
The linear combination of carrier phase is given by
Where
After combination, the Eq. (2) has the same form as Eq. (1). Taking
After combination the wavelength can be written as
Where
The combined frequency is
The combined ambiguity parameter is
The combined noise is
In this paper, the noise on all frequencies expressed in cycles is assumed the same and all frequencies are statistically independent. Then variance propagation of combined observations leads to
Where
Solution precision indicators and optimal combinations
The double differential mode of Eq. (1) will be used
Where
Where
The linearized Eq. (8) is expressed as
Where
Where
Combining Eqs (2) and (11), the linear combination model of double differenced carrier phase observation can be gained
With
Then the least square solution of Eq. (12) is
Where
It is obvious that
Transforming
Where
Defining
Where
Substituting Eq. (15) into Eq. (2.2.1) the variance of the azimuth can be written as
Where
So
SPI is inversely proportional to the diagonal elements of
In order to make comparison more intuitively, define SPI
Where
When using dual frequency, SPI is
Solving the partial derivative of Eq. (21) yields
For
When integer combination coefficients
The maximum value of SPI is
According to Eq. (23),
Figure 1 shows the relationship between a
Relationship between a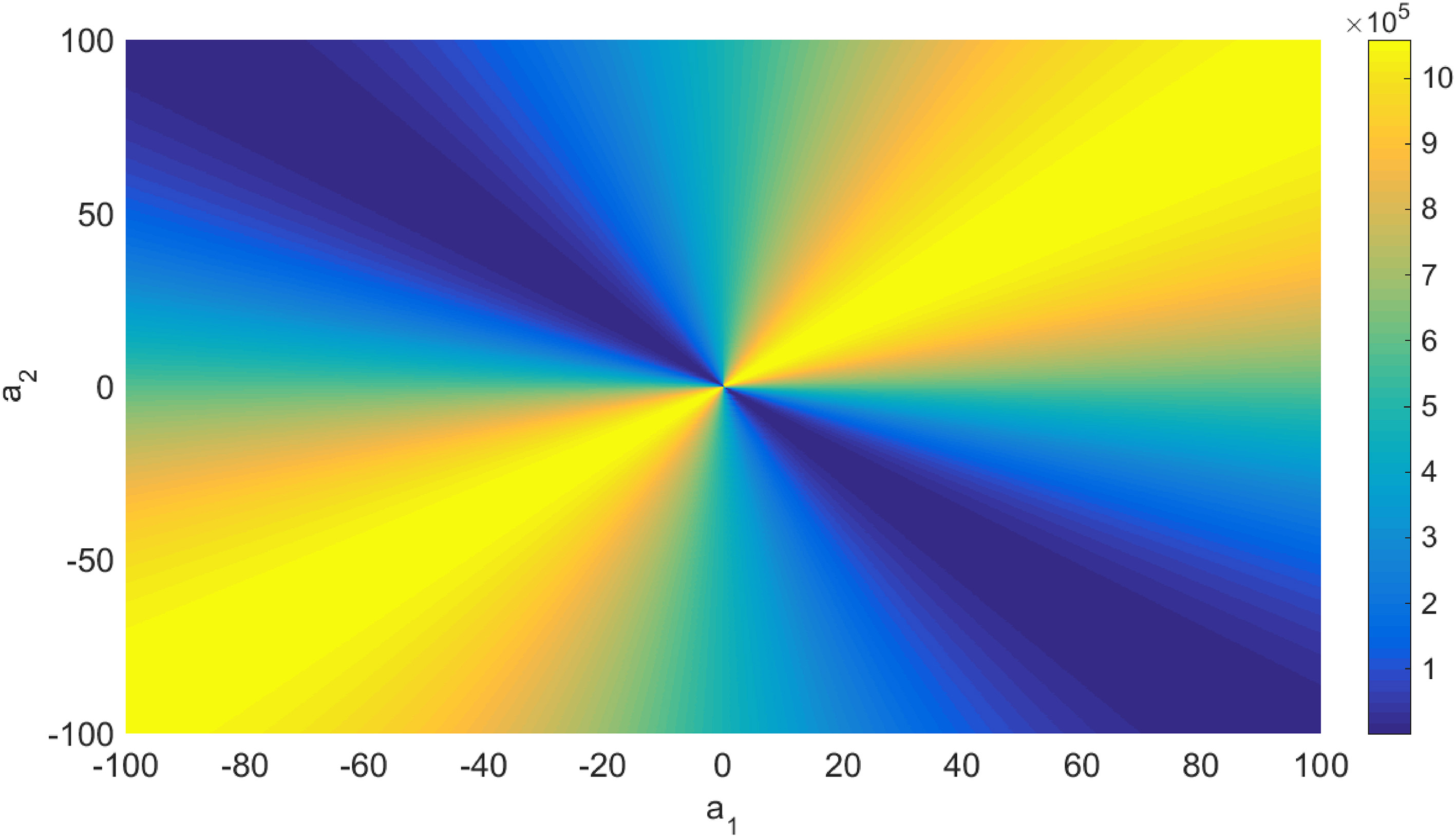
When using three frequencies, SPI is
Solving the partial derivative of Eq. (25) yields
Where
For equation
Then, when
In this case,
Optimal narrow lane combinations of GPS and BDS
Table 2 lists several common used combinations and their SPI values. In dual-frequency case, the SPI and SPI
The SPI and SPI
When using single frequency, the concept of combination will be meaningless, but Eq. (19) is still suitable, the SPI value of single frequency is
Where the value of SPI is a constant defined by its frequency. Table 3 shows the SPI and SPI
SPI and SPI
In Eq. (2.2.1)
Where
In case of dual-frequency,
Where
In case of triple frequency,
Where
According to Eqs (33) and (34),
The value of
In dual-frequency case
In triple frequency case
So when using different optimal narrow lane combinations the
In Eq. (32),
Where
Combining Eqs (32), (33) and (35) yields
Therefore, when using different optimal narrow lane combinations, the impact of systematic errors on solution will theoretically remain the same.
The theoretical derivation of optimal narrow lane combinations is verified with real BDS data. The experiment was carried out in 11
Experiment equipment.
Recorded data was processed by GNSS Multiple Frequency ToolBox, a self-developed software. Figure 3 illustrates the elevation variation of all observed satellites. There is no significant change in their elevation in an hour. Then the influence of satellite distributing variation can be disregard and the influence of combination coefficients were mainly focused on.
Azimuth and elevation variation of observed satellites.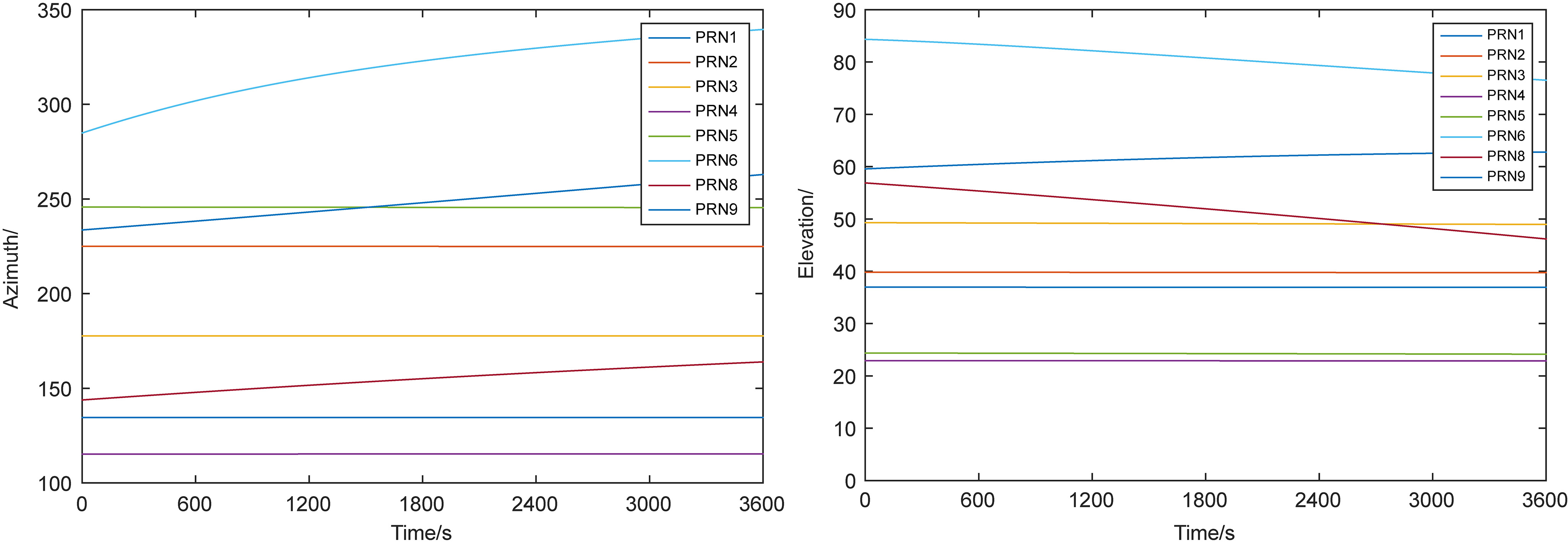
Solutions of optimal combination (763,620) are first compared to several common used combinations such as (1,1), (4,
The results of combination (763,620) and (1,1).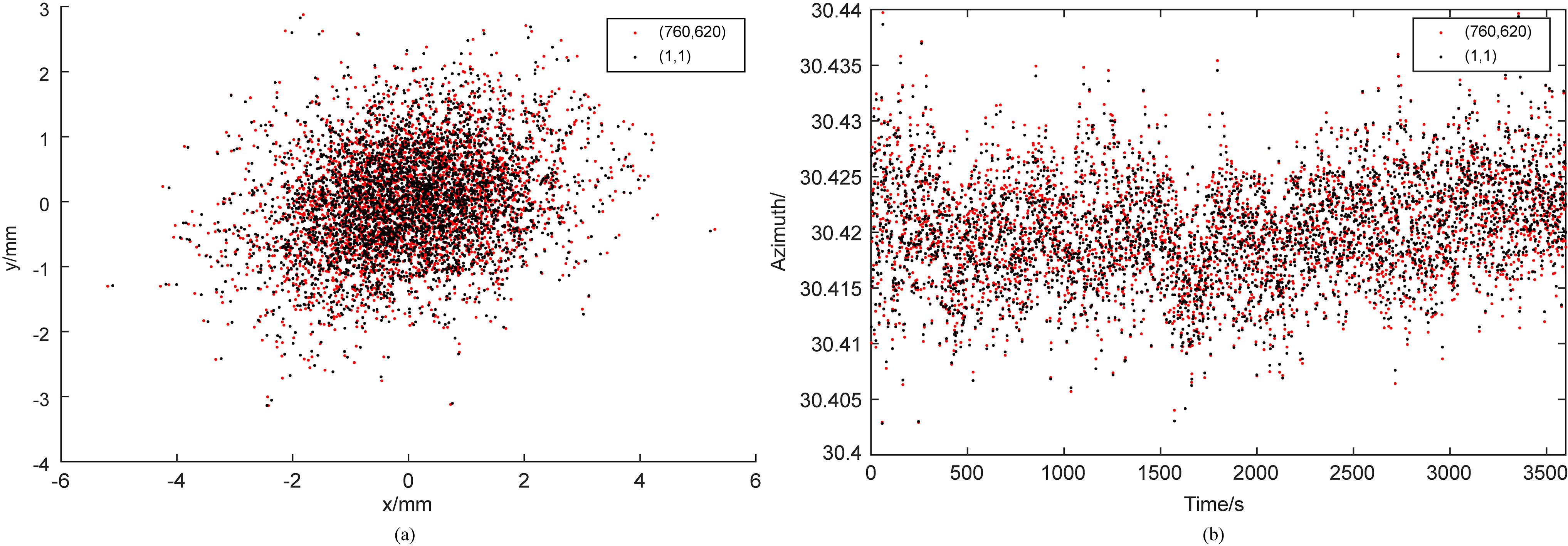
Table 4 summarized the solution precision of all combinations mentioned above. The azimuth standard deviation (STD) of combination (763,620) and (1,1) is corresponding to 16. 84
The orientating results of different combinations
Value of a
The results of combination (763,620) and (4, 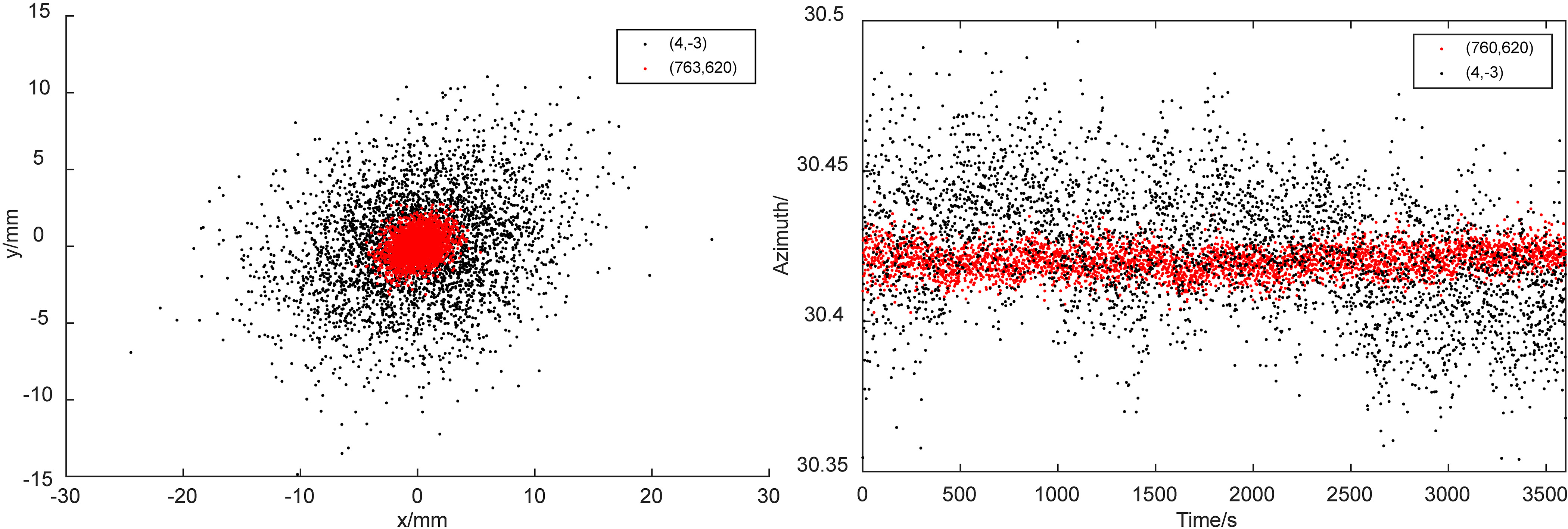
To further prove previous theoretical developments, Table 5 lists 19 categories of combinations which are distinguished by the value of a
Figure 7 shows the variation of SPI vs. a
a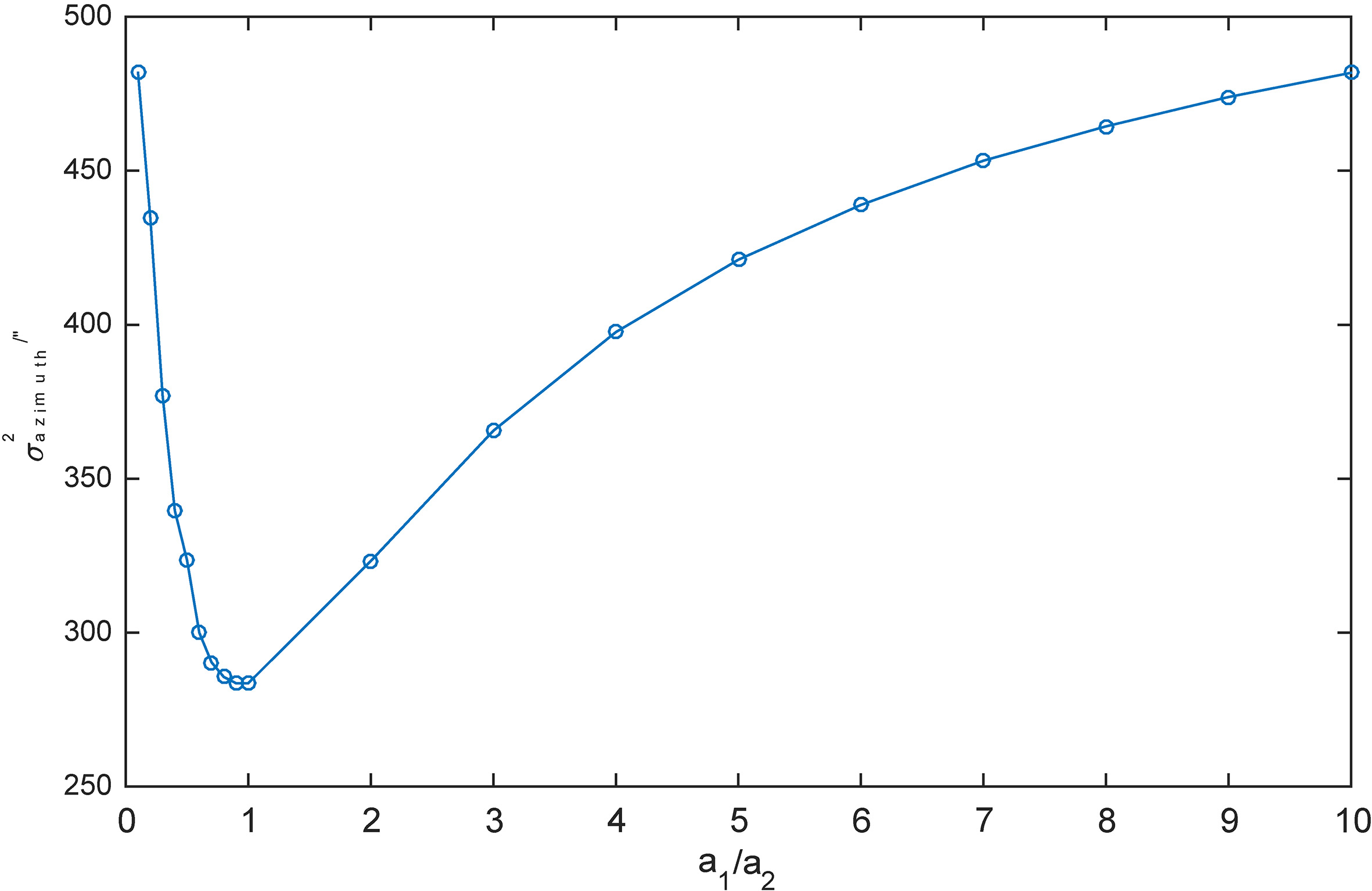
a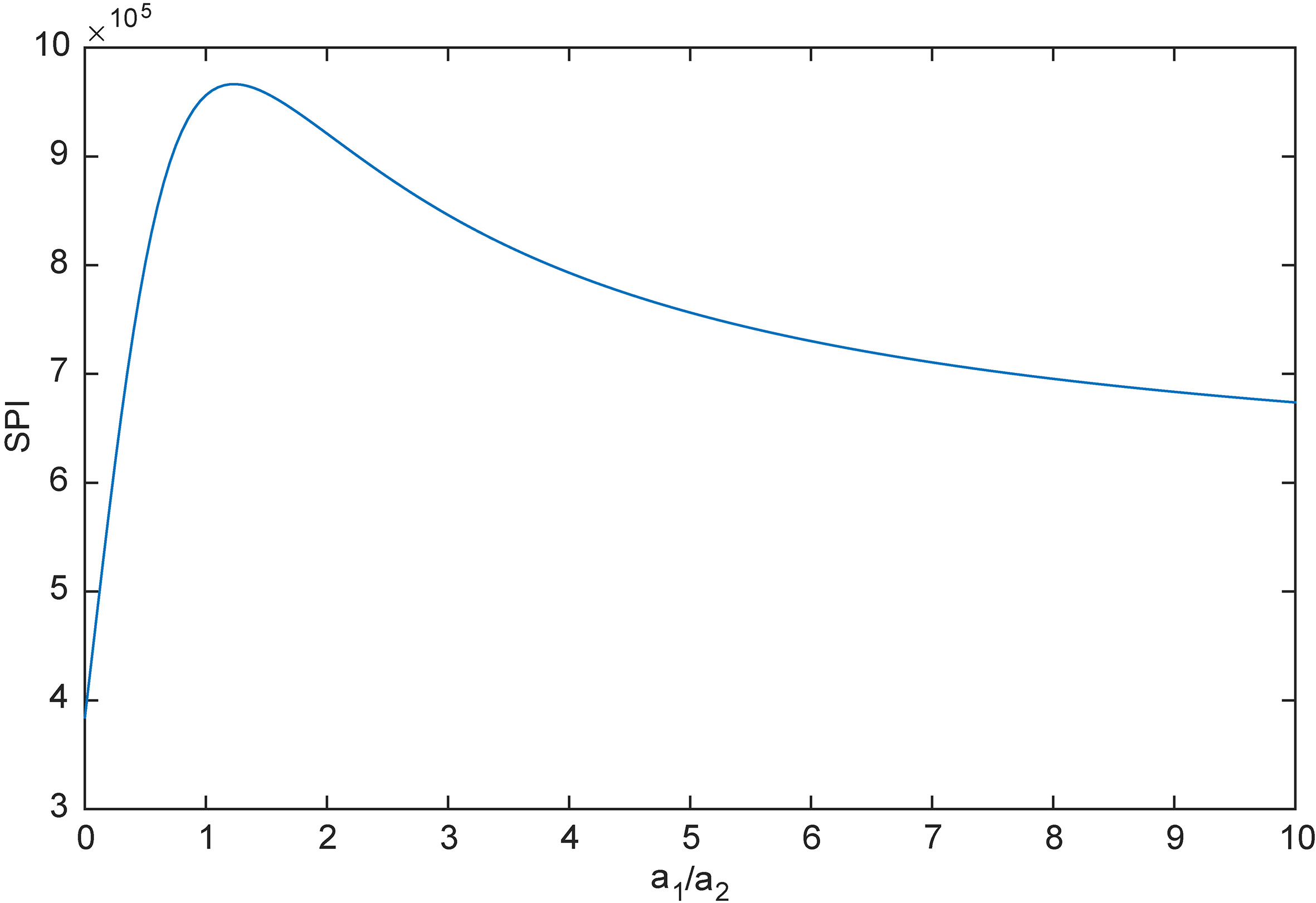
SPI and solution precision.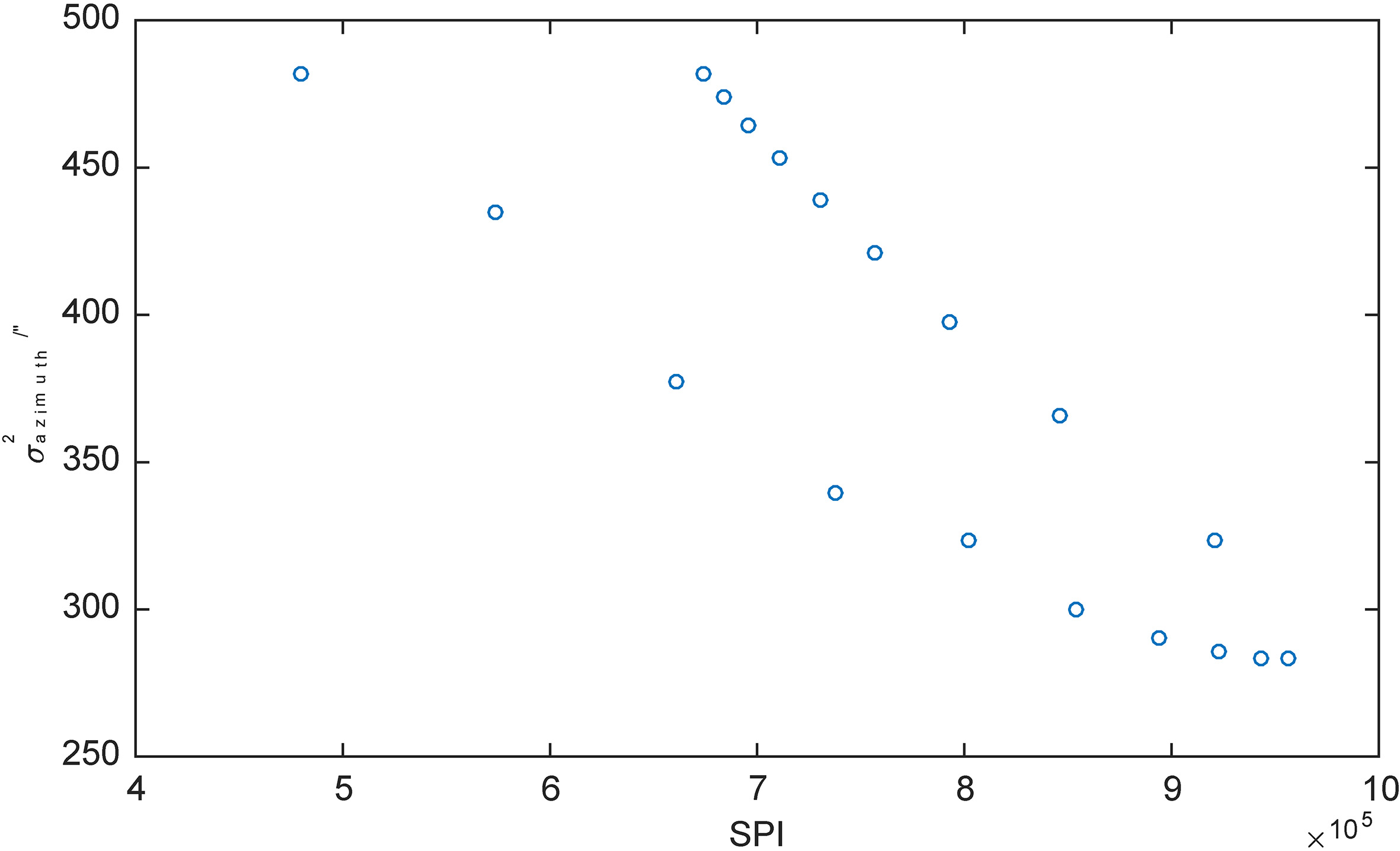
Figure 9 demonstrates the azimuth STD variation of 8 combinations in 24 hours during which the azimuth was calculated once every two hours, and each time lasts for an hour. The azimuth STD is the statistical result of azimuth values calculated in an hour. In Fig. 9, optimal combination solutions are marked by triangle, single frequency solutions are marked by asterisk and circles marks other ordinary combinations. It can be easily find out that optimal combinations can lead to more stable and more precise solutions than other combinations. The variation of STD may caused by the variation of satellite geometry and the influence of external errors.
The azimuth STD in a day of different combinations.
The optimal condition for narrow lane combination is suitable for any global navigation systems. For BDS, GPS and Galileo, the basic carrier phase observation equations are the same, so the derivation of optimal condition will be suitable for any systems. The optimal condition will lead to a great deal of combinations. When using BDS, combinations such as (763,620), (5,4), (9,8) etc. will lead to similar precision. For double frequency the optimal condition is a The optimal condition will be tenable in four frequency case or in the case of even more frequencies, where the condition can be written as: a From our previous analysis, SPI and orientating precision have a linear relationship, so SPI can be used as indicators of orientating precision. In addition, the factor is easy to calculate. The more frequencies are used, the higher orientating precision will be. SPI is closely related to the number of frequencies used. At present, some satellites of BDS are broadcasting a fourth frequency centered at 2492.028 MHz. If use all these four frequency, SPI value will reach 2798193 which is nearly two times higher than using three frequency. This will theoretically lead to a higher orientating precision.
In this work, we conducted a systematic investigation on optimal narrow lane combination and presented the optimal condition and two precision indicators. The general multi-frequency linear combination models are used, where the noise factor and lane number are defined. Then SPI and SPI