
Abstract
The narrow lane carrier phase combinations, especially in the case of short baseline, are commonly used to obtain high orientating accuracy using the multi-frequency GNSS (Global Navigation Satellite System) due to their ability to mitigate measurement noise and multipath. However, after reviewing the errors in solutions of NL (narrow lane) combinations and the original combination (combine carrier phase data independently), it is found that the original combination always has a better performance than all NL combinations with positive coefficients regardless of which navigation system is used and how many frequencies are used. To achieve this, the observation equations of linear combination and original combination are first considered with emphasis on the relevant errors and the measurement noise mitigating ability. Then this paper derives the solutions of those combinations and focuses on their performance comparison in aspects of solution accuracy and systematic errors. Finally, the theoretical developments are verified with BDS data and the advantages of the original combination are summarized and discussed.
Keywords
Introduction
Most of global navigation satellite systems (GNSS) are transmitting three or even more frequency signals. Beidou navigation system (BDS) developed by China started its regional services in 2012 and provides signals centered at B1, B2 and B3. In addition to the previous L1 and L2 frequency, GPS now provides a third frequency L5. Galileo system can provide five frequency signals respectively centered at E1, E5, E5A, E5B and E6. Linear combinations of these multi-frequency observations have different characteristics. Wide lane combinations are often used to solve ambiguities because of their long wavelength. However, narrow lane combinations are always used to calculate high accuracy position for they are capable of mitigating noise.
Lots of investigations have been conducted on linear combinations of multi-frequency observation in the last decades. Neumann et al. [2] showed that dual-frequency narrow lane combination was capable of mitigating multipath and noise. Dual-frequency linear combinations was systematically investigated by Cocard and Geiger [3] and Collins [4]. Han and Rizos [5] developed long wavelengths but low noise linear combinations which were suitable for ambiguity resolution. Odijk [6] mainly focused on the ionosphere combinations that three frequency can provide. Teunissen and Odijk [7] showed that three frequency observations can lead to much more possible combinations. Petovello [8] mathematically compared the solution precision of narrow lane combination L1
Through the introduction above, it is easy to find out that most of the investigations mainly concentrated on wide lane combinations with long wavelength, low ionosphere delay and low tropospheric error. However, the investigations on narrow lane combinations and the original combination are not systematic. Though Petovello [8] mathematically compared the performance of narrow lane combination L1
The models and their solutions
Carrier phase observation
In GNSS orientating, the double differential carrier phase model is commonly used in order to remove receiver and satellite clock errors and mitigate other spatially correlated errors. The model is written as
Where,
Where TEC is the total electron content along the propagation path in units of
The linear combination of DD carrier phase observations is given by
where,
where
In general, three groups of linear combinations can be distinguished, including wide lane region, intermediate region and narrow lane region. The motivation for selecting linear combinations is that combinations from different groups have different characteristics. Combinations from the first two groups are often used to solve ambiguities because of their long wavelength. However, combinations from narrow lane region are always used to calculate high accuracy position for their low noise.
In very short baseline situation, the ionosphere delay and geometric errors are often considered negligible which means that the noise is considered as the main factor affecting orientating accuracy. Therefore, to obtain the highest orientating accuracy, the objective is to mitigate the effect of the noise. The noise amplification factor relative to L1 (or B1) can be written as
It is obvious that some NL combinations can make
The original carrier phase combination model is given by
Taking the assumption made earlier, the covariance matrix of
where,
Define
where,
where
Based on Eq. (3), the linear combination of measurement vector
where
The covariance matrix of
Then the least square solution of Eq. (10) can be derived
where
The original combination of DD carrier phase vector
The covariance matrix of
Then, the least square solution of Eq. (13) is obtained
where
Two approaches are required to compare those solutions; one for stochastic errors and one for systematic errors.
Comparison of stochastic errors
According to Eqs (2.2.1) and (2.2.2),
It can be proved that
In dual-frequency case, the variation of
where

In triple-frequency case,
where
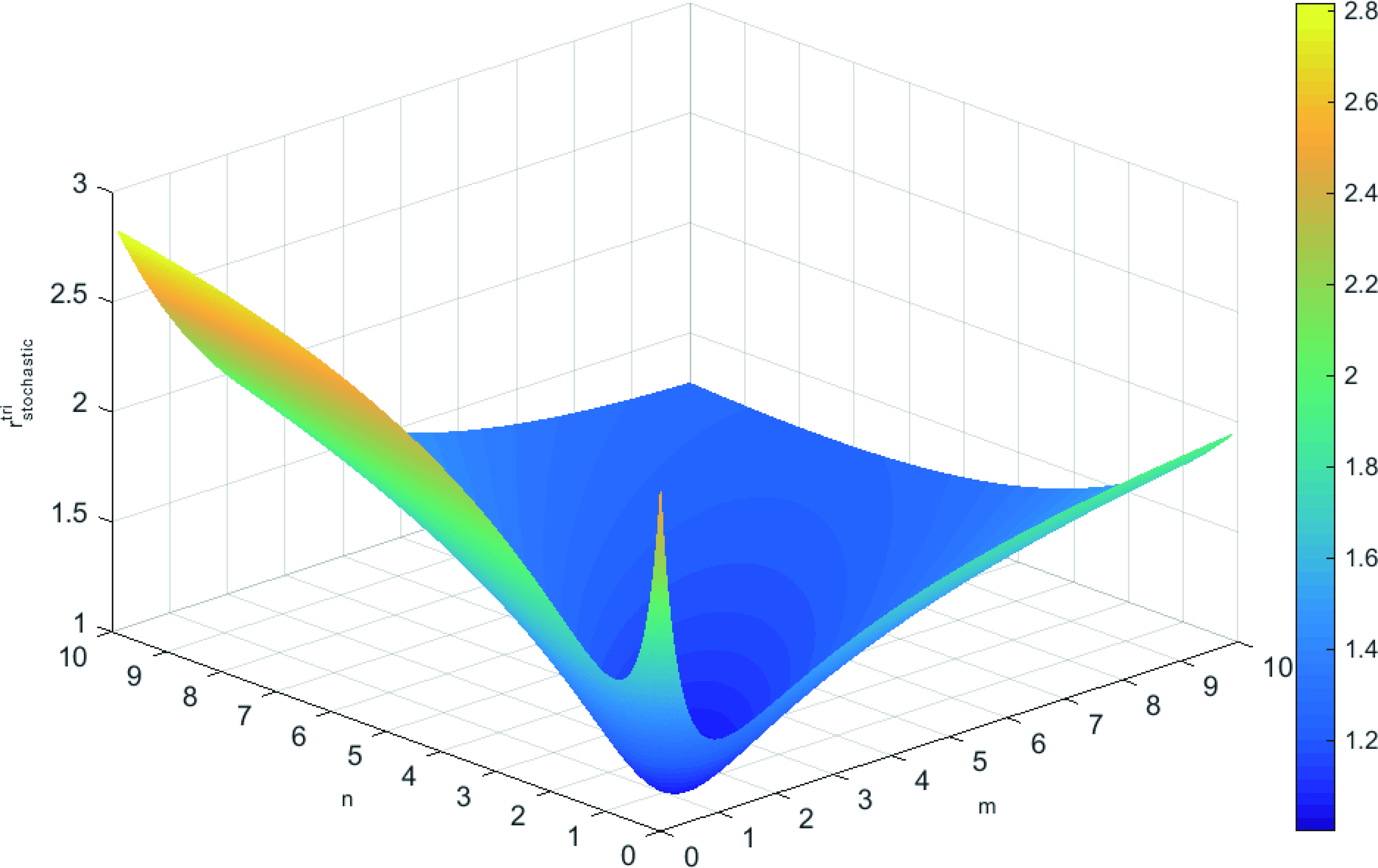
From above analysis, the original solution is more accurate in terms of standard deviations when the problem is considered in the position domain. But for commonly used combination (1, 1) and (1, 1, 1), the difference is very small.
Frequency independent errors and ionosphere delay in solution are assessed according to Eq. (2.2.1) and Eq. (2.2.2). In those two equations,
Then, the frequency independent errors for original combination is
The frequency independent errors for NL combination is
Equations (19) and (20) indicate that the frequency independent errors in both solutions are equivalent. Therefore, the following part mainly focuses on ionosphere delay. The ionosphere delay can be given as
Then, the ratio of them can be obtained
It is difficult to judge the relationship between Eq. (23) and (1) in this general form. Thus, Eq. (23) is discussed in two specified cases as following.
In this case,
Let
This implies that when
For NL combinations satisfying
Though there is a point where
In general, combining the analysis in Section 3.1 the conclusion that in dual frequency case the original combination is characterized by best solution precision, lower ionosphere delay and longer wavelength comparing to the NL combinations with positive coefficients can be obtained.
Taking the partial derivative with respect to
If the extreme point
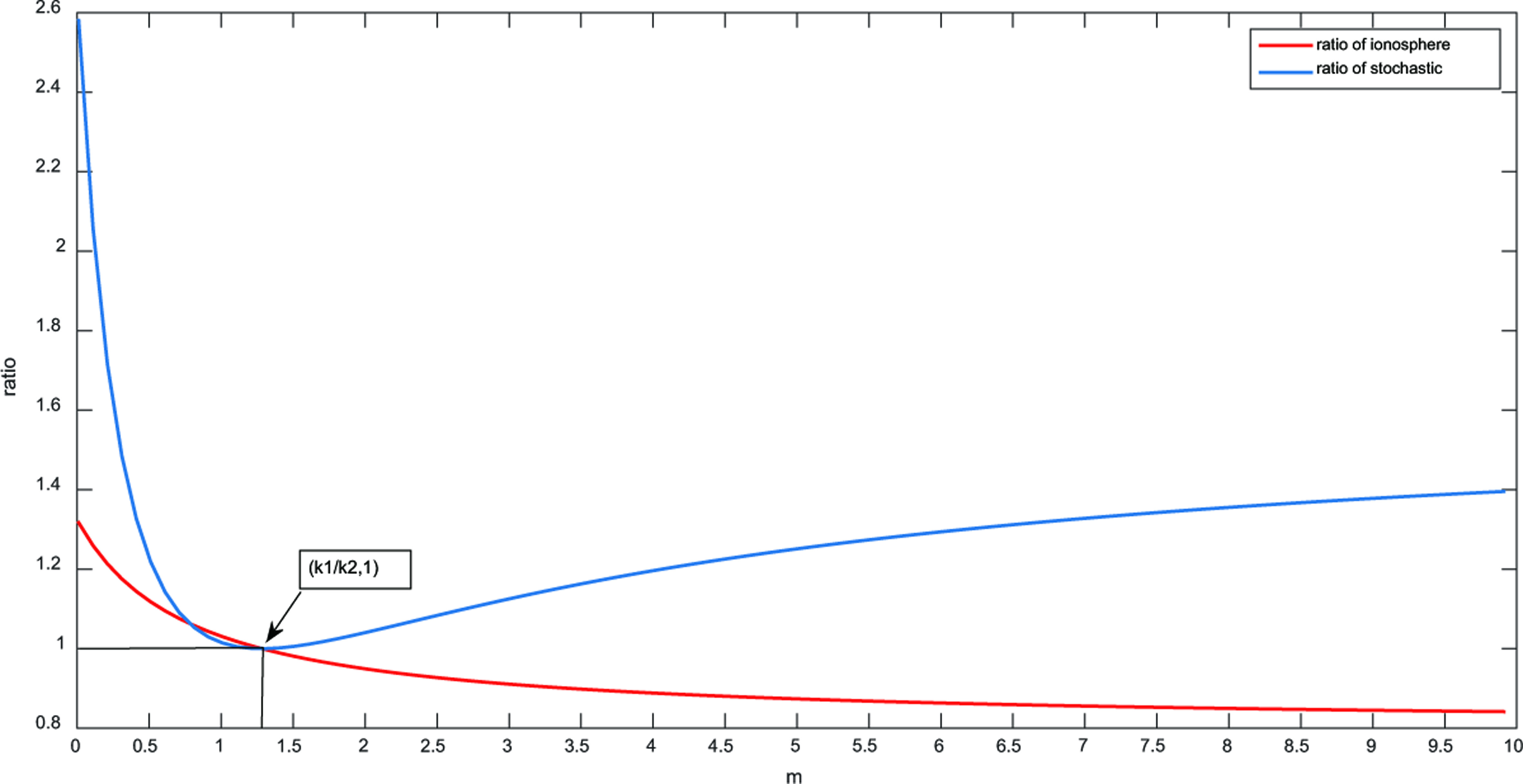
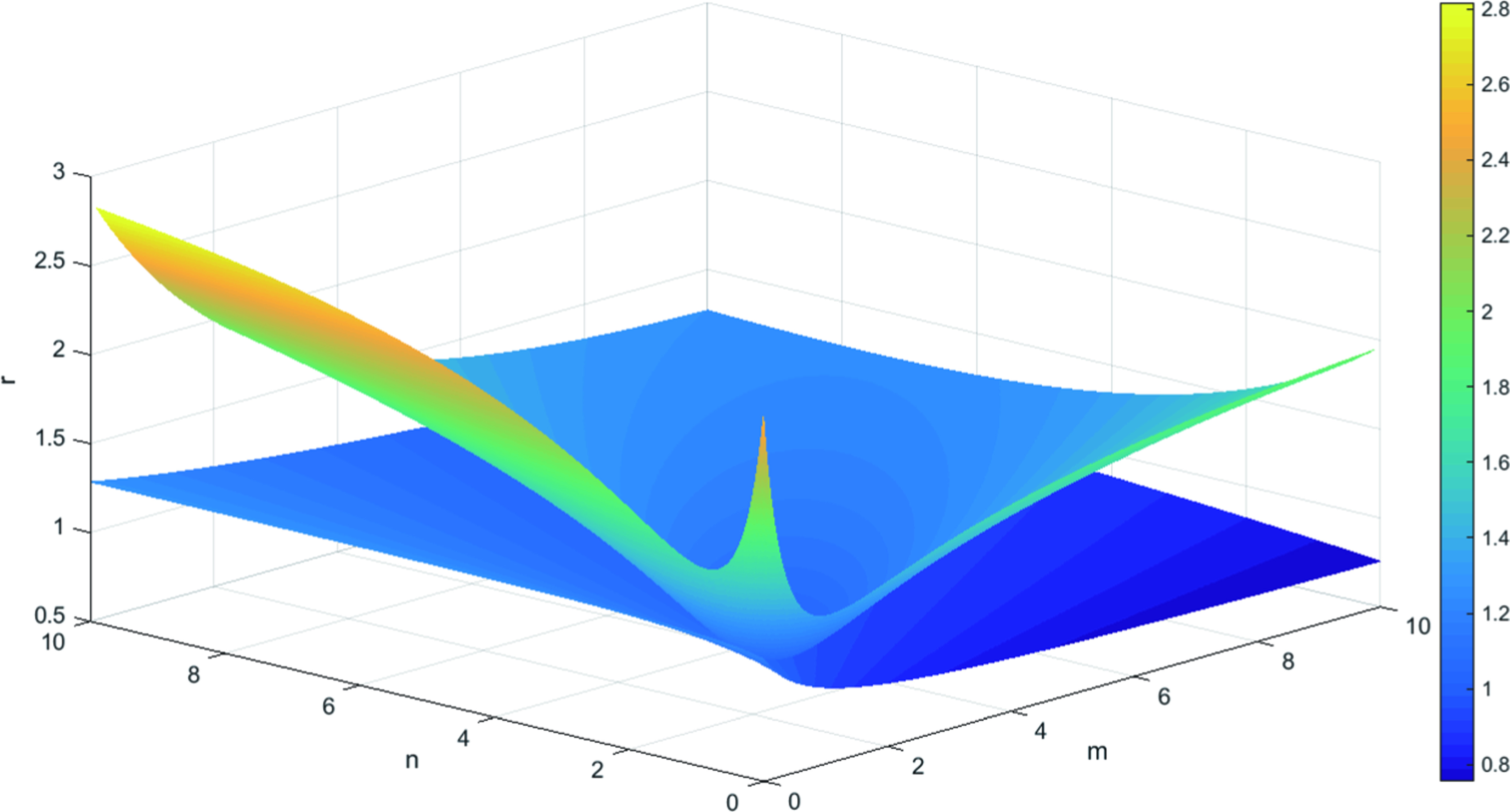
It should be noticed that there are combinations satisfying
Though the cross point
For the narrow lane combination (1, 1, 1), the
In general, we can derive the conclusion that in triple frequency case the original combination is also superior to NL combinations in higher solution precision, lower ionosphere delay and longer wavelength.
The theoretical development of previous section is verified with real BDS data collected during an experiment. The experiment is carried out in 22
Recorded data was processed by self-developed GNSS Multiple Frequency ToolBox. Ambiguity parameters can be resolved in tens of seconds and the detection for cycle slip is conducted all the time to make sure the correction of ambiguities.
and
with four NL combinations
Experiment equipment.
Four NL combinations are selected to compare with the original combination: (1, 1), (763, 620), (11, 10) and (3, 1). Table 5 lists the values of
Figure 7 illustrates the solution errors (solutions subtract their mean values) of those combinations. The true values of
Solution precision of NL combinations and the original combination.
Solutions error of NL combinations and the original combination.
To further prove the derivation, a 24–hour experiment was conducted. Figure 8 illustrates the solution standard deviations of three narrow lane combinations and the original combination. As can be seen, though it is very small, we still able to confirm that the original combination still generally has higher solution precision than narrow lane combinations.
Solution precision of NL combinations and the original combination in 24 h.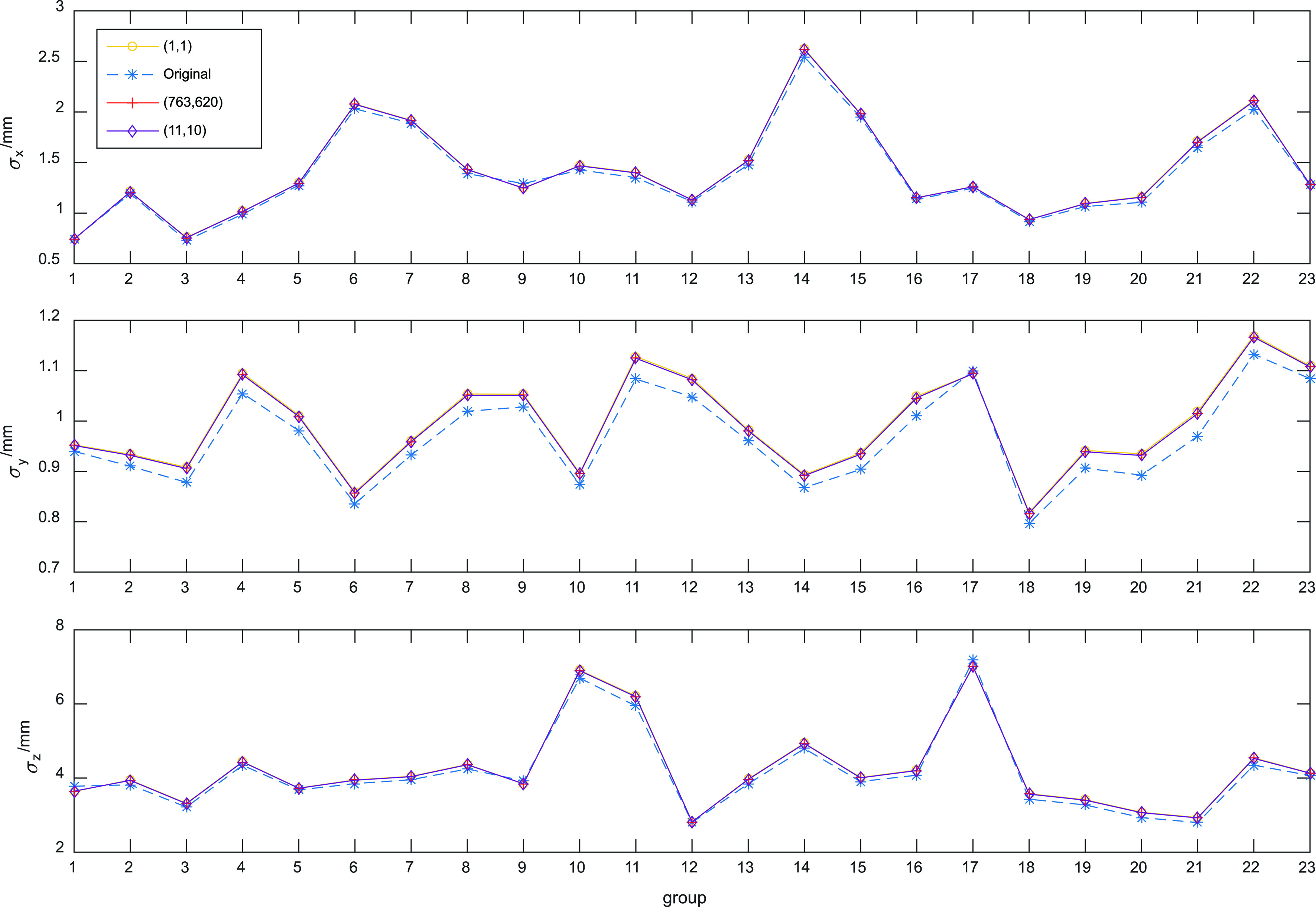
In this paper, we compared the performance of NL combinations and original combination in dual and triple frequency case under different navigation systems. Through the above theoretical development, it follows that the original combination is superior to the commonly used narrow lane combination no matter which navigation system is used and how many frequencies are used. Though the improvement is small, the original combination preserves some advantages over the NL combinations which is summarized as following:
Longer wavelength. The virtual wavelength of narrow lane combinations is always shorter than the original. Since the original combination uses carrier phase measurements independently, its shortest wavelength is longer than that of the narrow lane combination. In other words, it is easier to resolve the ambiguities of original combination, than it is to resolve the ambiguities of narrow lane combinations directly. Besides, using the original combination will be more convenient for there is no need to transit other ambiguities to narrow lane ambiguities. More robust. To use narrow lane combinations, it is needed to make sure that carrier phase measurements from all the frequencies are usable. Otherwise, we will unable to form the narrow lane equation. However, the original combinations uses the carrier phase independently which means that if there are observations from a satellite or a frequency are not available the original combination equation can still be formed and computed. Higher solution accuracy. Though the improvement is slight, it still can be noticed that the original combination has the highest solution precision.
The main disadvantage of the original combination is that the measurement number of the original combination is at least two times higher than narrow lane combinations, especially in the multi-frequency and multi-system case. This will lead to a high dimension of coefficient matrix and thus affect the computational efficiency. Nevertheless considering the powerful processing ability of hardware nowadays, performing such a computation is not a big problem.
Footnotes
Acknowledgments
This work is supported by Aeronautic Science Foundation of China (grant nos. 201551U8008).