
Abstract
This research aims to introduce a novel radial basis functional link net (RBFLN)-based QSPR (quantitative structure-property relationship) model to predict the solubility parameters of the polymers with the structure – (C
Keywords
Introduction
Until today, a few researchers have used QSPR (quantitative structure-property relationship) modelling [1] for the prediction of the solubility parameters of polymers: Yu et al. [2] constructed a QSPR model correlating the solubility parameters of polymers with their molecular structures by using common multiple linear regression. Goudarzi et al. [3] and Koç and Koç [4] demonstrated the applicability of different artificial intelligence tools (i.e., genetic programming and least square support vector machine) on the same problem but with different data sets of training and testing, and they consequently reported that their predictive performances were better than the traditional multiple linear regressions. However, this research subject is still in its preliminary stages and needs further investigation to know the relative merits of many other different ways of artificial intelligence-based modelling. This has motivated the present study exploring the radial basis functional link net or network (RBFLN) as an alternate artificial intelligence-based model for the solubility prediction of polymers. It is a hybrid model [5] combining the functional link net [6] with the radial basis functions [7], which achieves faster convergence and more accuracy than the widely-used multilayer feed forward network [5]. Both networks have formally same structure where Levenberg-Marquardt algorithm is widely used as one of the most efficient training methods due to its fast convergence and high accuracy [8, 9, 10, 11, 12, 13]. On the other hand, this type of iterative local optimization strongly requires a “good” initialization close to the global optimum to avoid falling into a local optimum, and many empirical findings have suggested that a global search method (e.g., cuckoo search) is able to easily find a good initial estimate of the optimum solution which is then refined by the Levenberg-Marquardt algorithm [14, 15, 16]. Cuckoo search is a relatively new meta-heuristic algorithm [17, 18] based on the brood parasitism of some cuckoo species, which is potentially more powerful than many other optimization techniques [14, 19, 20]. Considering the points mentioned above, this study primarily proposes a novel QSPR modelling method based on the radial basis functional link network (i.e. called RBFLN-QSPR) which uses a hybrid learning scheme combining the cuckoo search and Levenberg-Marquardt algorithm, and then applies it to predict the solubility of polymers. One recent literature survey showed that the RBFLN received little attention [21, 22, 23, 24, 25] but there was no any research about QSPR modelling using the RBFLN.
The RBFLN-QSPR is implemented using five steps for better clarity and ease of use, and its predictive performance is compared to that of multilayer feed forward network (MLFFN)-based QSPR model (MLFFN-QSPR) in order to evaluate its predictive capability. The results of internal (goodness of fit) and external validation (testing) of these models are also compared to the results of previously-developed models that are known as the genetic programming-based QSPR model (GP-QSPR) and the multiple linear regression-based QSPR model (MLR-QSPR) [4]. It must be noted here that these QSPR models received the same training and testing data sets [4] including the experimental solubility parameters and molecular descriptors of 97 polymers with the structure – (C
The remainder of the paper is organized as follows: Section 2 is devoted to the theoretical description of the neural network models (RBFLN and MLFNN). Section 3 presents the details of the implementations with the results and discussion heading. Finally, concluding remarks are given in Section 4.
Theory and calculation
RBFLN (Fig. 1) is formally similar to three-layered MLFFN (Fig. 2) but has extra connectivity from the input to the output layer [21, 24]. Thus, each of
RBFLN model.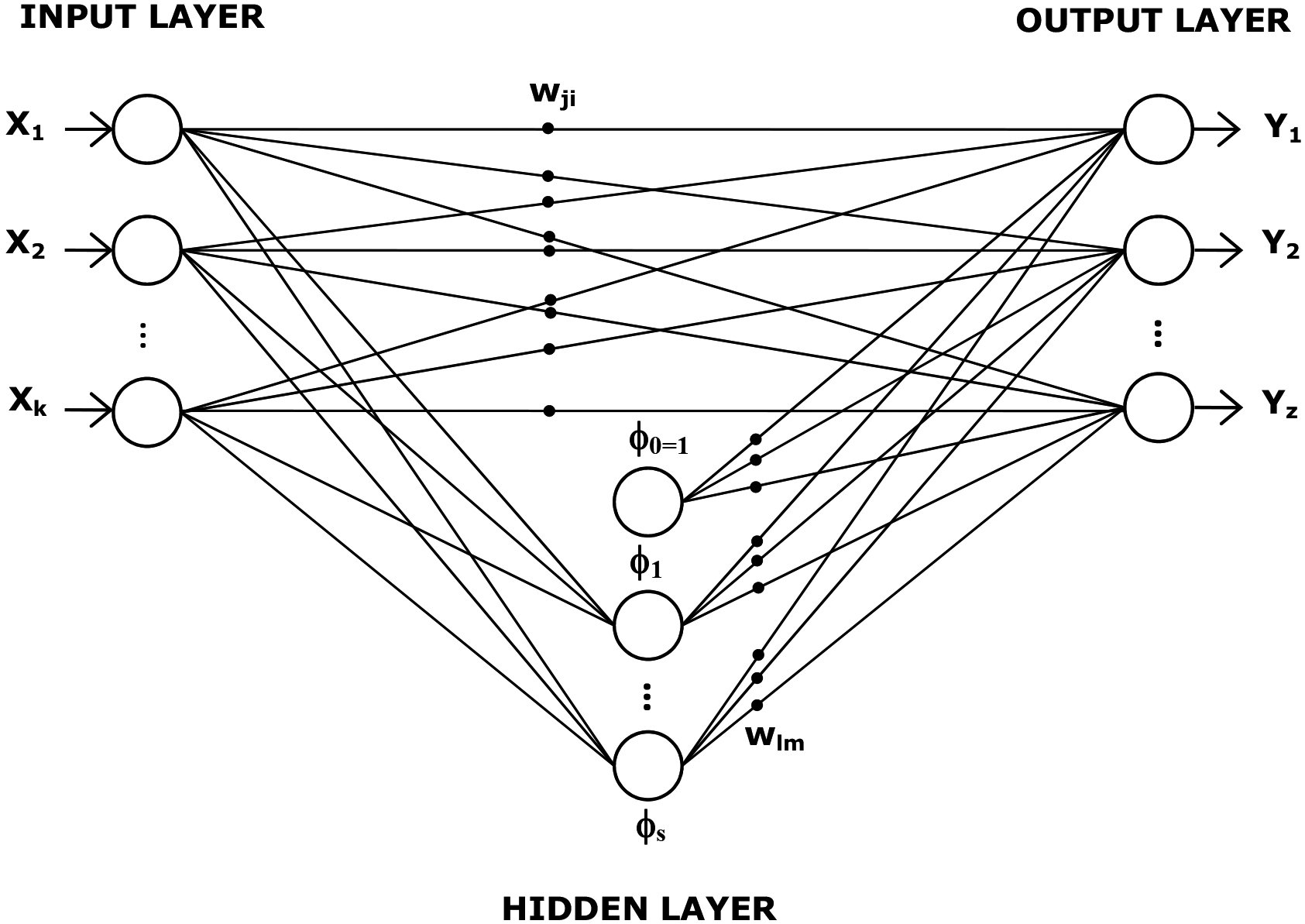
MLFFN model.
where
MLFFN model [7, 8, 26], unlike RBFLN, has different non-linear transfer functions (e.g., sigmoid, hyperbolic tangent) which can be used for hidden and output layers:
where
Using the Levenberg-Marquardt (LM) training algorithm based on the minimization of objective function
where
Generate initial population of
where the Lévy flight is a type of random walk which is characterized by a series of consecutive jump steps drawn from the Lévy distribution [17]. When exploring new solutions, the scale of flight is controlled by a step size factor
RBFLN-QSPR and MLFFN-QSPR models were implemented step by step (Fig. 3) as follows.
In step i, the input
In step ii, the input and output data were normalized within the range of
Ranges of inputs and output (
) variables in the training data set [4]
Ranges of inputs and output (
The flowchart of the RBFLN- and MLFFN-based QSPR modelling steps.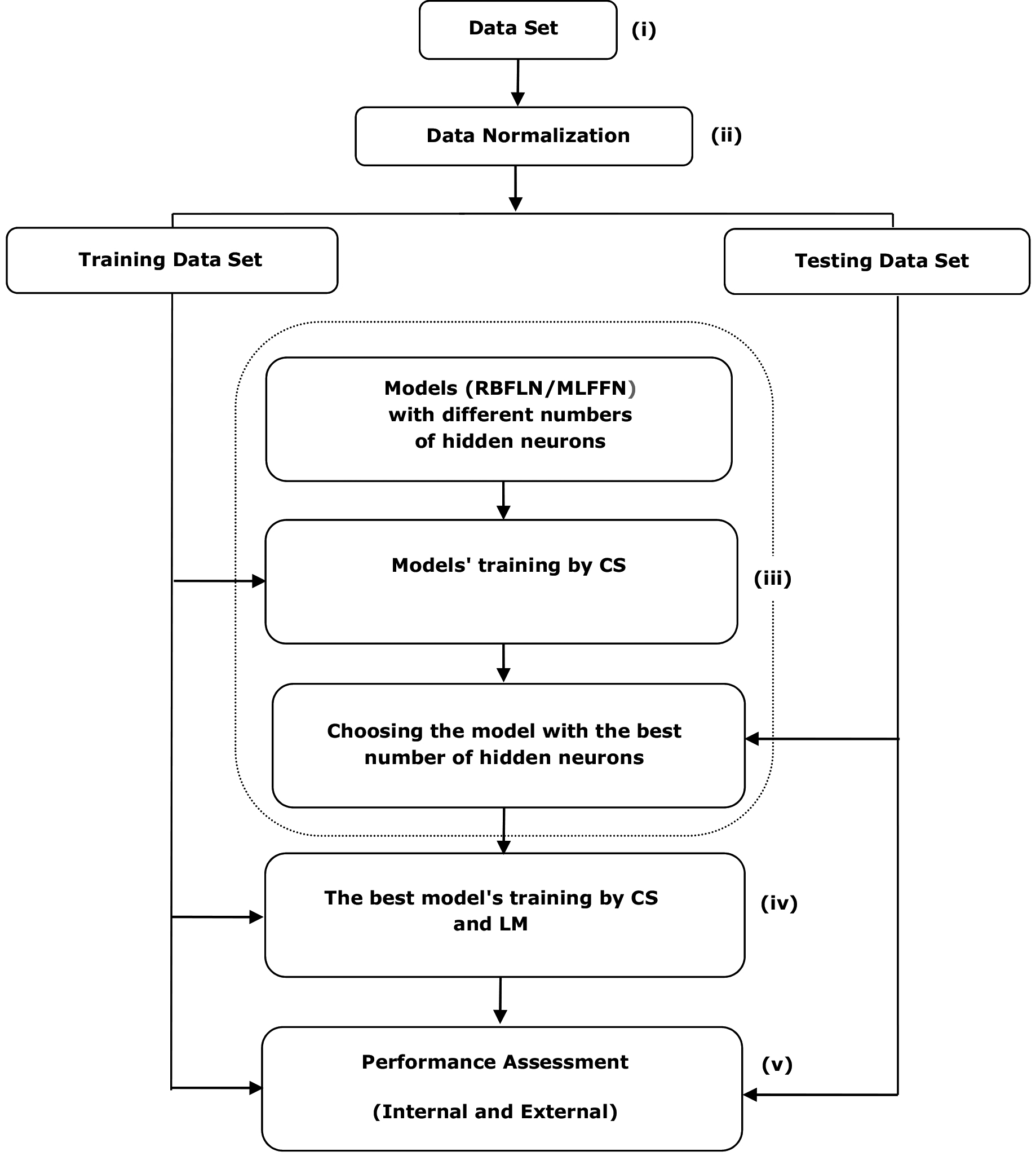
Ranges of inputs and output (
The result of experiments for RBFLN-based QSPR model
The result of experiments for MLFFN-based QSPR model
In step iii, first, a series of the two types of networks were generated with the increasing number of hidden layer neurons, and then each of them was trained separately by the CS algorithm. The results were summarized by computing
where
Where
In step iv, the CS algorithm initialized the networks’ parameters which were then used as the input by the LM training algorithm, and when taking both networks with their best numbers of neurons in the hidden layers, the convergences of the CS and LM algorithms to the optimized (best) parameters of RBFLN-QSPR and MLFFN-QSPR models were given in the Figs 4 and 5, respectively.
Convergence of the normalized objective function value for the CS training of RBFLN and MLFFN based QSPR models.
Convergence of the objective function value for LM training of RBFLN- and MLFFN-based QSPR models.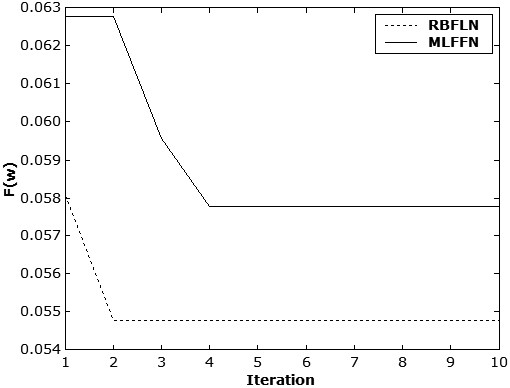
In step v, the goodness of fit of the models for the training data set was assessed (Table 7) by examining the mean absolute percentage error (MAPE), correlation coefficient (
Internal validation results for the models
The results of Y-randomization tests for the models
External validation results for the models
Comparison between experimental and predicted solubility parameters by the RBFLN-QSPR model at the testing stage.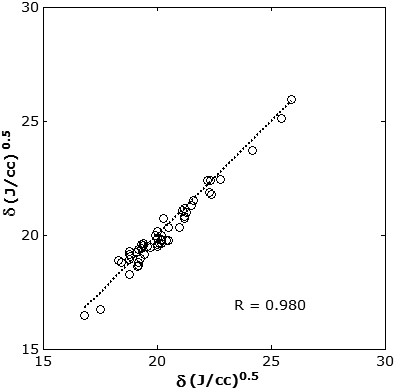
Comparison between experimental and predicted solubility parameters by the MLFFN-QSPR model at the testing stage.
The residuals versus predicted values for RBFLN-QSPR model.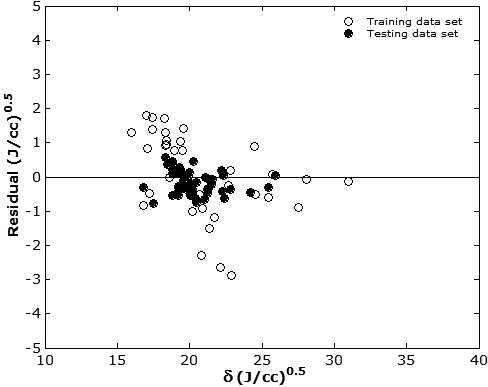
The residuals versus predicted values for MLFFN-QSPR model.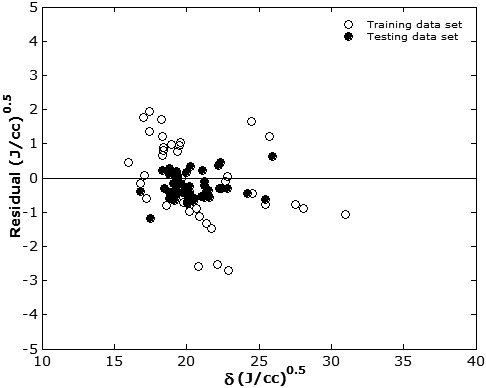
William plot describing the applicability domain of RBFLN-QSPR model.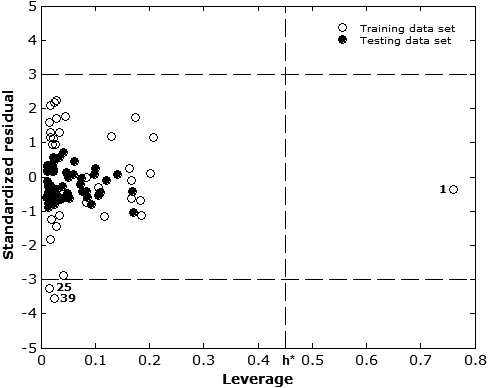
William plot describing the applicability domain of MLFFN-QSPR model.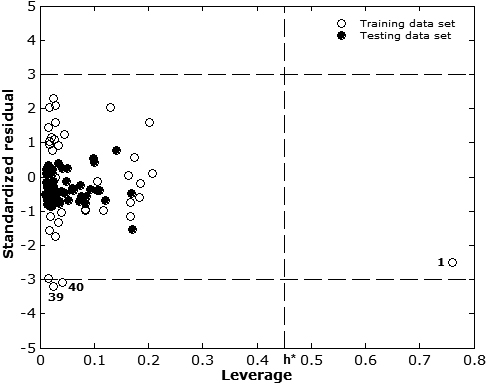
An analysis of the results is as follows:
In general, the good quality of the models can be indicated by small RMSE, MAPE and AIC values,
An analysis of Figs 8–11 show that i) the propagation of the residuals on both sides of zero line is random (meaning that the errors are normally distributed) and thus it can be concluded that no systematic error exists in the development of the RBFLN- and MLFFN-based QSPR models (Figs 8 and 9) ii) Both models perform well in terms of AD (Figs 10 and 11): The entire testing set compounds lie within the applicability domain (i.e., the squared area between
In this study, the implementations were performed using computer programs that were written in MATLAB run on an Intel Core i7 based PC.
This study investigates the development of RBFLN-based QSPR model to predict the solubility parameters of polymers. The results show that it outperforms MLFFN- as well as GP- and MLR-based QSPR models in terms of the external validation metrics and it includes the following advantages: i) RBFLN uses a global-and-local way of a general non-linear modelling to extract more information, while GP, MLR and MLFFN are globally tuned (i.e. linear or non-linear), ii) RBFLNN which produces much simpler structures than MLFFN can be implemented easily in practice. On the other hand, GP with the lowest AIC score can be preferred as a more practicable one to capture data structures with the least number of parameters. However, we noticed that GP differs from neural networks in that it constructs a mapping by optimizing its structure and parameters simultaneously and it has own limitations (e.g., difficulties in finding constants). This study also indicates that the hybridization of CS and LM algorithms effectively combines the local and global optimisation for the learning of neural networks
Footnotes
Conflict of interest
The authors declare that there is no conflict of interests.