
Abstract
The traditional compressive imaging method for a moving object has the problem of repeated compressive sampling when the object stops moving or remains stationary. To solve this problem, this paper presents an improved method for compressive imaging in this situation. In contrast to traditional methods, the image is preprocessed before reconstruction. First, the Euclidean distance between the current measurement vector and the previous one is calculated, and then a threshold is used to determine whether the new measurement vector is valid. If the distance is below the threshold, the measurement vector is a repetition of the previous one and is discarded; otherwise, the measurement vector is valid and the measurement value is retained and used for image reconstruction. Theoretical analysis and simulation results show that the proposed method can eliminate the repeated sampling problem caused by a pause in the movement of an object, enabling effective reconstruction of the moving object image.
Introduction
As an important research topic in compressive sensing theory [1, 2, 3], compressive imaging reconstructs an original image using a small number of measurements, most typically using a single-pixel camera [4, 5, 6]. The camera makes use of a single pixel and a spatial light modulator to compressively sample the scene, but this method requires that the scene is static or changes only slightly before the compressive sampling is completed; otherwise, the original image cannot be reconstructed. For compressive sampling of moving objects, a method based on linear array sensors was proposed in [7]. The method can perform compressive sampling for continuously moving objects, and the objects in the image can be effectively reconstructed. However, when the object shifts from a moving state to a stationary state in the sensing area, the problem of repeated sampling occurs, which affects the image reconstruction. To solve this problem, we propose an improved compressive imaging method for moving objects. Simulation results show the validity of the proposed method.
This paper consists of the following parts. Section 2 introduces the basic principle of compressive sensing theory. Section 3 describes the related work and improved compressive imaging method. The experimental results are analyzed in detail in Section 4. Section 5 presents our conclusions.
Basic theory of compressive sensing
Consider a signal
If there are
If we obtain the coefficient vector
In practice, considering the influence of various errors, Eq. (3) can be rewritten as
Employing the characteristics of a linear array sensor and moving object, the compressive imaging of a moving object is realized using a higher sampling frequency and column-by-column process [7]. However, this method requires that the object is in a state of continuous forward movement. If the object pauses after entering the field of view, the measurements obtained at this time are repeated compressive samples of the original image, so the reconstructed image is incorrect.
Figure 1 presents the improved compressive imaging scheme for moving objects. In contrast to the traditional method based on a linear array sensor, the proposed scheme first processes the measurement vectors and then reconstructs the object image. In the preprocessing stage, the Euclidean distance between the current measurement vector and the previous one is calculated and then the distance is compared with a threshold. If the distance is larger than the threshold, the current measurement vector is valid and is retained; otherwise, the current measurement vector is a result of repeated sampling and is discarded. The flow of this process is shown in Fig. 2.
Improved compressive imaging scheme.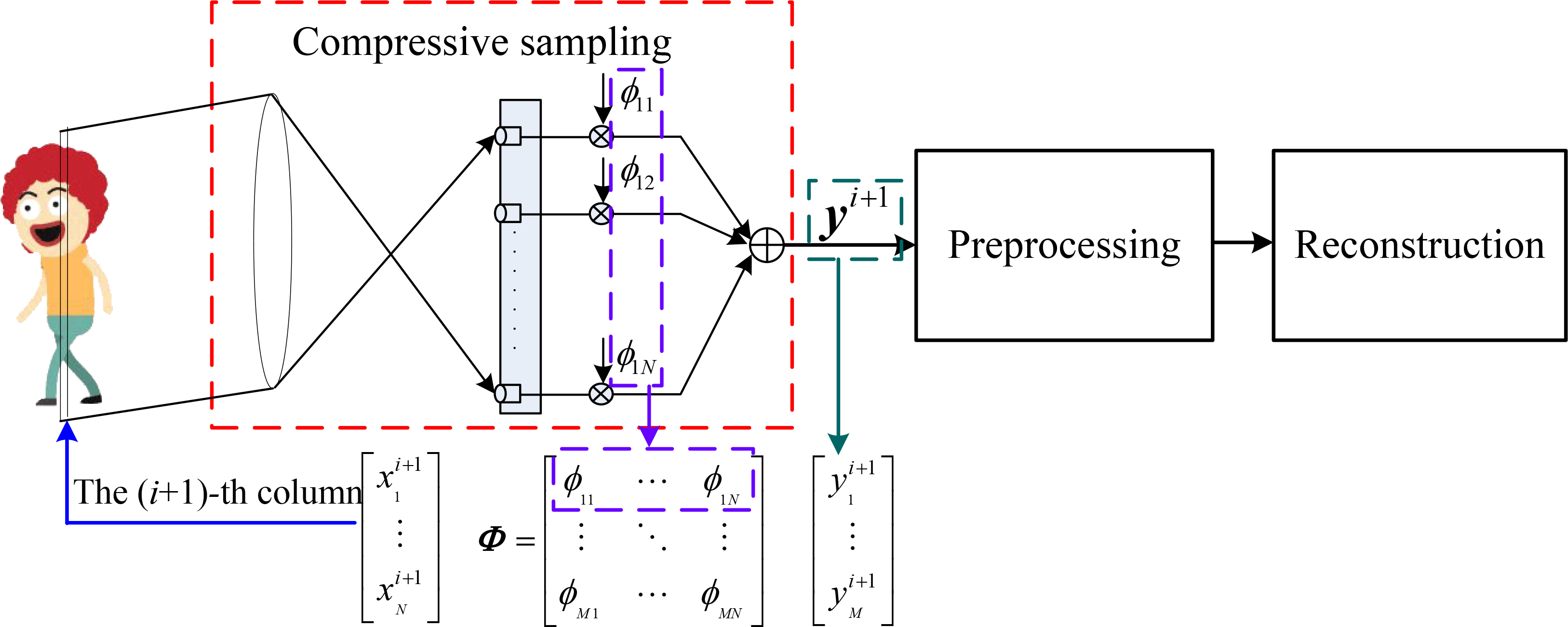
Compressive imaging flow.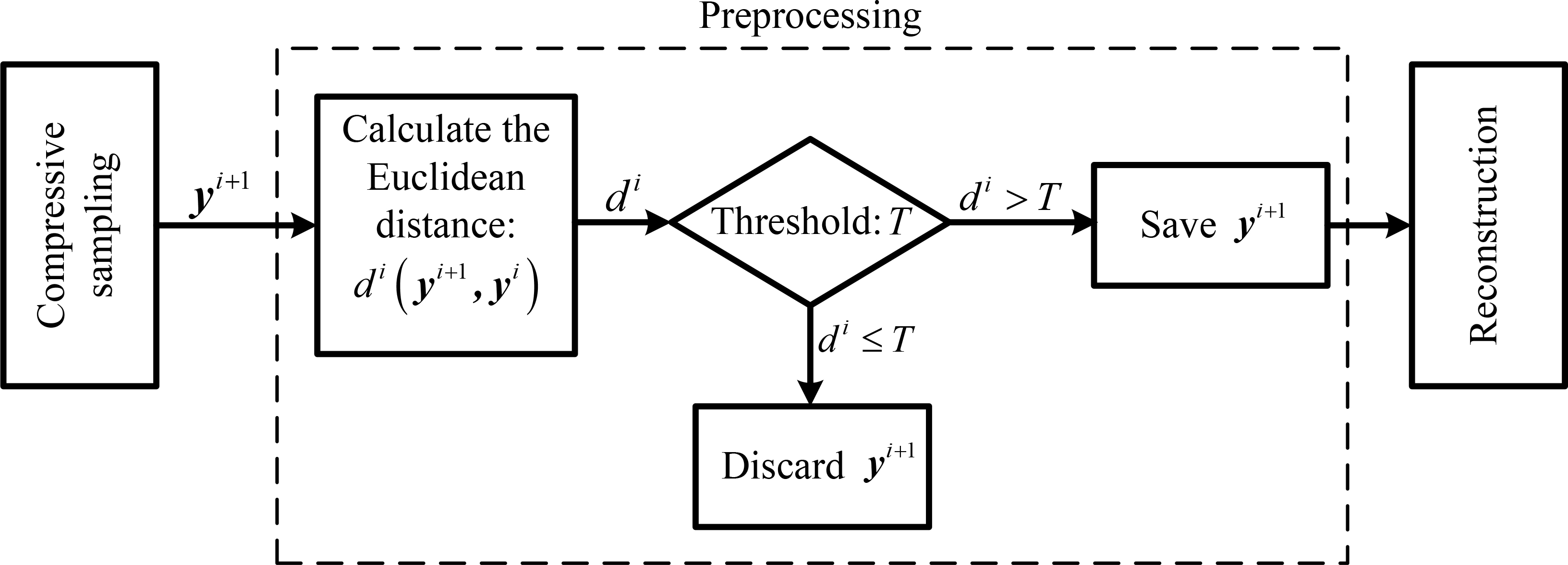
For clarity, the moving object image is
If the moving object stops moving or remains stationary in the sensor’s field of view, measurement vector
Otherwise, there is a non-negligible difference between the vectors. We use Euclidean distance
Taking into account the error, we determine whether the measurement vector is a duplicate using threshold
The value of the selected threshold directly affects the results of the reconstructed image. In this paper, the threshold is determined mainly by presampling and adjusted coefficient
Threshold selection algorithm
After preprocessing, the object image can be reconstructed using a traditional method such as orthogonal matching pursuit [17, 18, 19, 20].
To verify the proposed method, a simulation experiment was carried out. The scenario of the experimental scene is as follows: the moving object enters the field of view of the sensor, pauses for a period of time, and then continues. Some frames of the real video with different backgrounds are shown in Fig. 3. In this experiment, we used one column of pixels of the industrial camera to capture the moving object signal. The camera’s frame rate was 150 fps.
Moving objects with different backgrounds.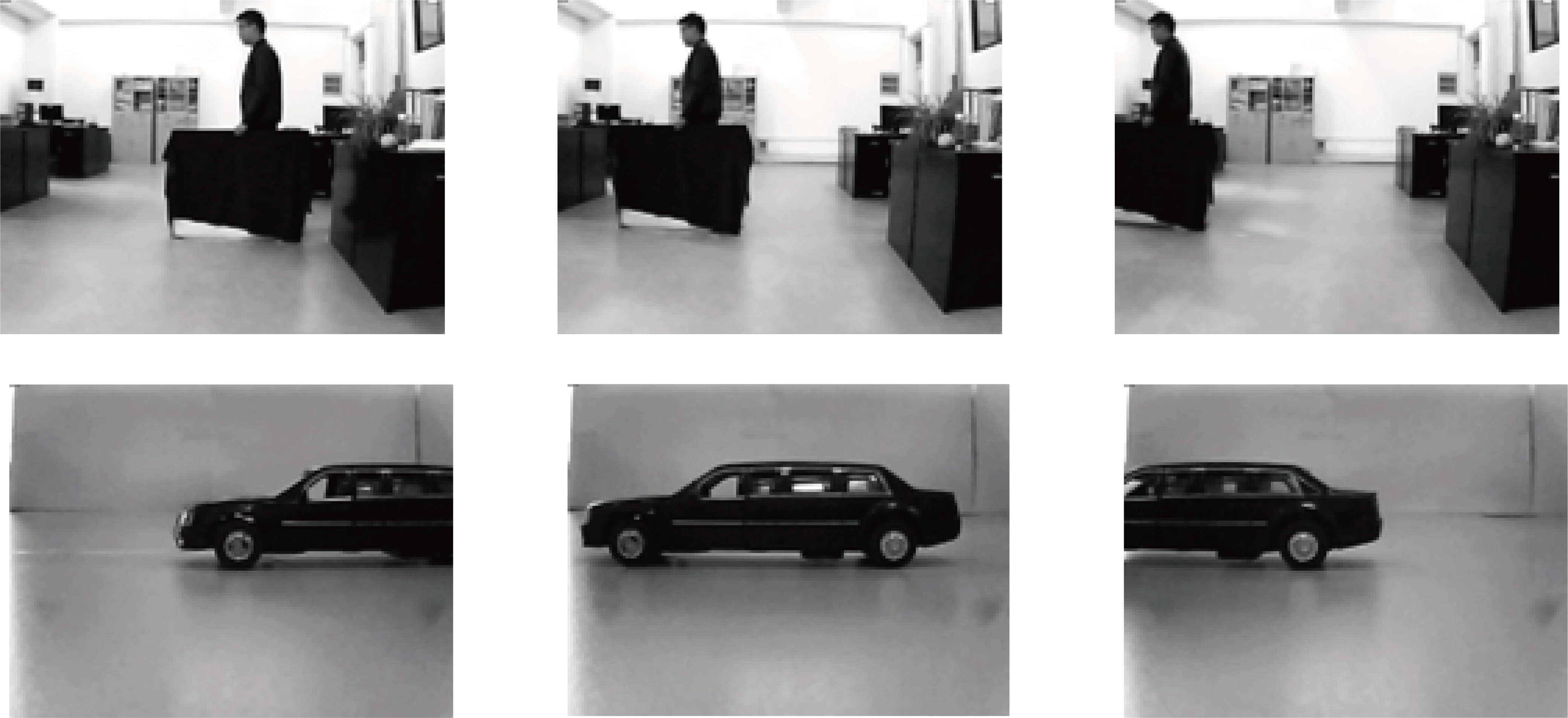
After obtaining the measurement vectors of the moving target, we calculated the Euclidean distance between the adjacent vectors, as shown in Fig. 4a, which shows that the Euclidean distance between repeated measurement vectors is small, while the Euclidean distance between nonrepeated measurement vectors is large. Therefore, we can eliminate these repeated measurement vectors using the threshold, as shown in Fig. 4b.
Distribution of the Euclidean distance between adjacent vectors.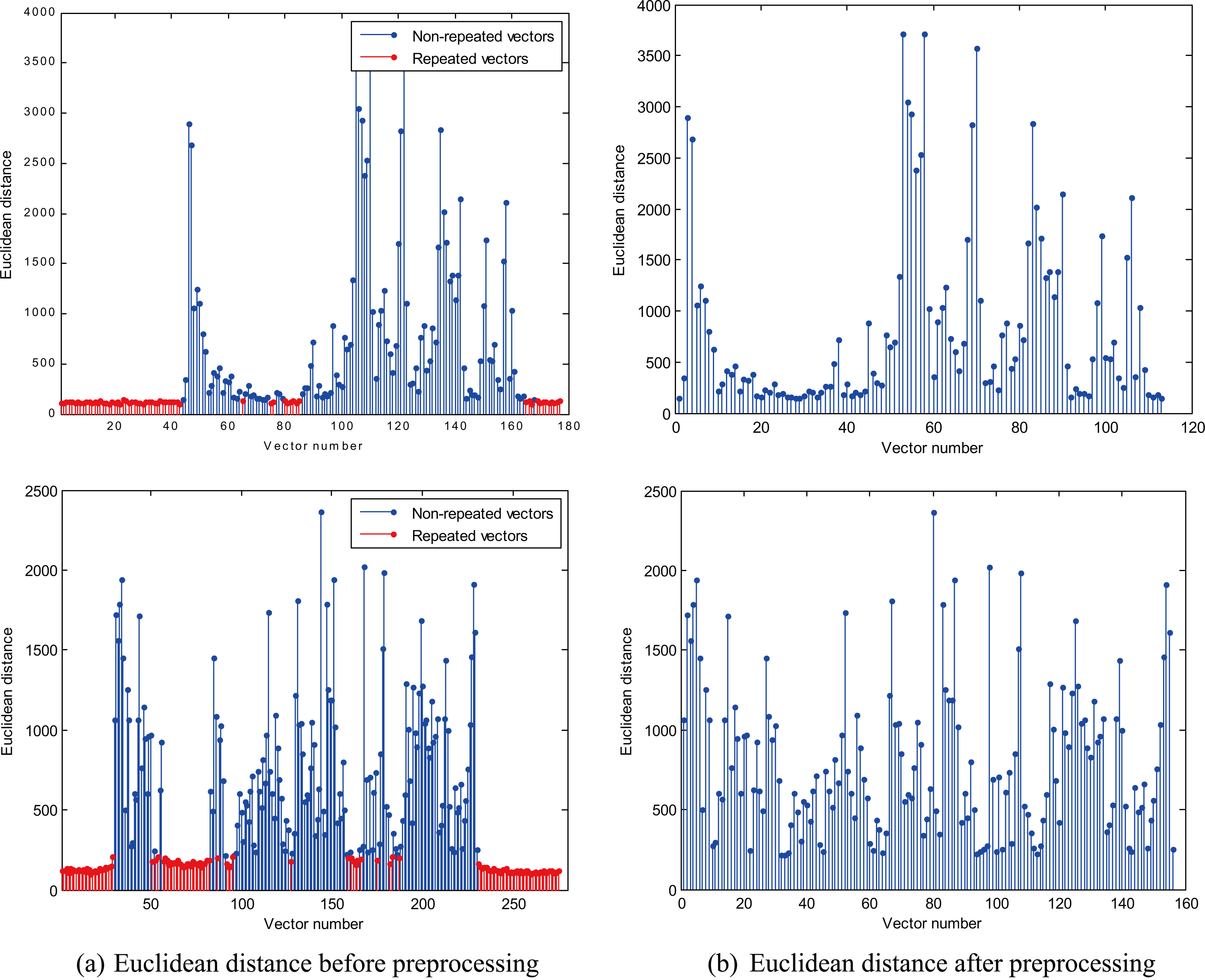
Comparison of reconstructed images.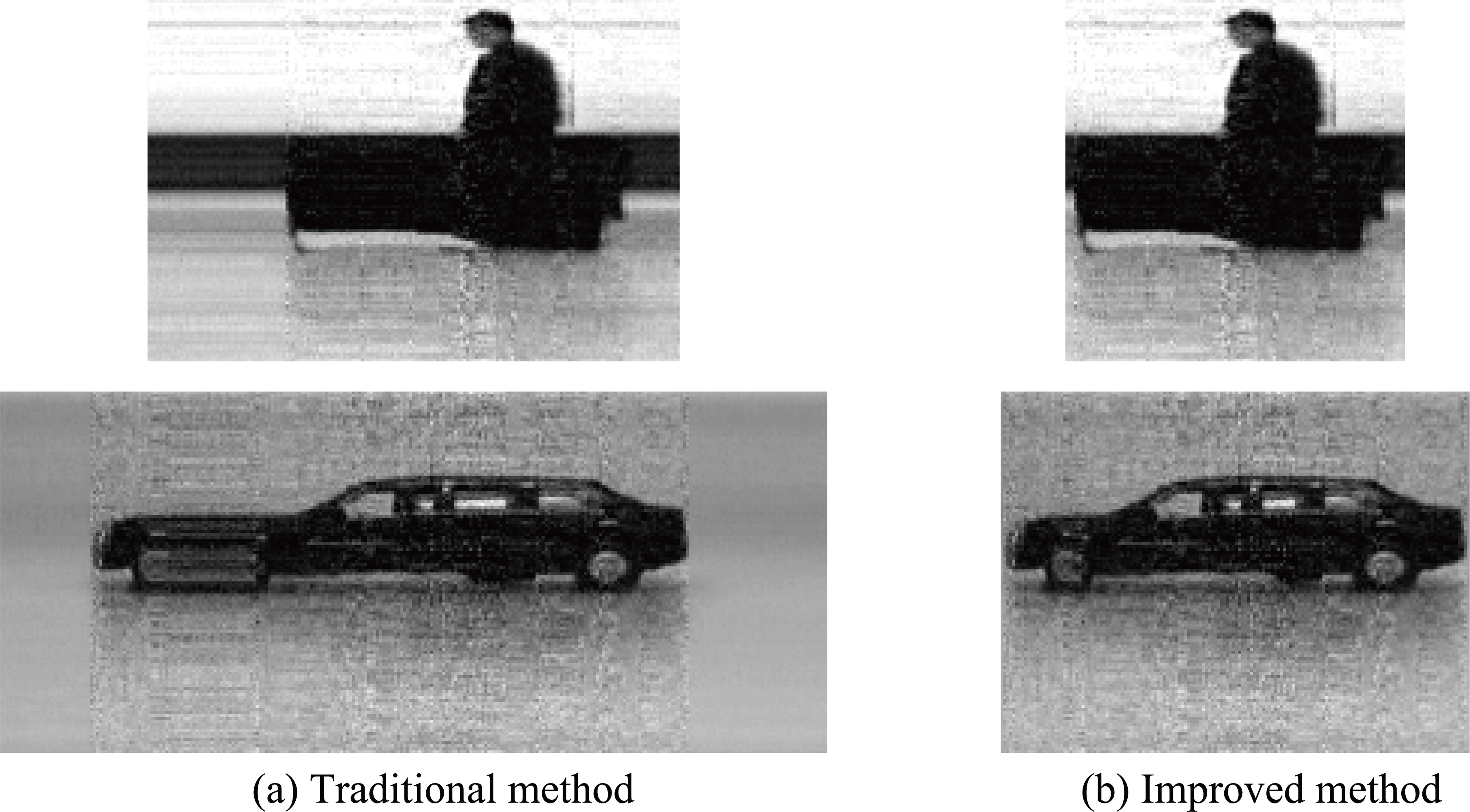
The original images have 120 pixels per column. In the reconstruction, we assume that the sparsity of each column is
To address the repeated sampling problem of traditional compressive imaging methods caused by pauses in an object’s motion, this paper proposed an improved compressive imaging method that eliminates repeated sampling by preprocessing. A theoretical analysis and simulation results show that the compressive imaging method can not only effectively solve the problem of repeated sampling caused by motion pauses, but also can eliminate redundant static background and effectively reconstruct the object image.
Footnotes
Acknowledgments
This work is supported by the Anhui Provincial Natural Science Foundation (no. 1508085QF118), Key Projects of Natural Science Research in Universities in Anhui (no. KJ2017A531), the Opening Foundation of Key Laboratory of Intelligent Computing and Signal Processing (Anhui University), Ministry of Education, National Undergraduate Training Program for Innovation and Entrepreneurship (no. 201611059003), Scientific Research Fund Project of Hefei University (no. 17ZR02ZDB), Anhui Province Teaching and Research Project (no. 2016jyxm0874), and Outstanding Youth Foundation of Hefei University (no. 2016YQ09RC).