
Abstract
In order to reduce the redundancy of the analysis process of UAV communication cyclostationary signal, a modeling and analysis method of UAV communication cyclostationary signal based on virtual reality technology is proposed. Using the VR technology, the 3D scene of UAV flight is reconstructed, and the mutual information and correlation dimension are obtained. Using the maximum negative entropy FastICA algorithm and non-cyclic stationary signal processing algorithm, the anti-jamming model of cyclic stationary signal processing is established by analyzing the signal compression performance and time delay of pseudo-random sequence. The experimental results show that there is no obvious signal fluctuation in the time domain of the oscillation signal and the reconstruction results of the oscillation signal, and the amplitude fluctuation is not large.
Introduction
Unmanned aerial vehicles (UAVs) are unmanned aircraft operated by self-contained programmed devices and wireless remote control equipment. They evolved from early models of aircraft and were originally used as targets for ground weapon systems during military training. Due to the relatively low cost, small size, flexibility, ease of use and other factors, UAVs can be widely used in special environments [1]. In communication, almost all communication signals and many interfering signals have cyclic stationarity. The communication between the UAV and the ground base station will be seriously affected by the multipath effect and Doppler frequency shift due to the interference of the surrounding environment and the rapid movement of the UAV itself. Compared with the general aeronautical channel, some ground base stations for UAV communication may be built in a relatively hidden place, which needs higher data rate, stricter power limit and higher communication reliability.
A kind of UAV-aided relay communication system is studied by Bao et al. [2]. In the presence of passive ground eavesdroppers, the ground base station uses the UAV relay to transmit information to legitimate ground users, and under an operating environment, the closed-form approximation degree of interception probability and ergodic secrecy rate is analyzed and derived, and the influence of different system parameters on the security performance is studied. The system has high interception success rate and traversal security rate, but it is difficult to resist signal interference. Hu et al. [3] study a new kind of wireless information monitoring scene, in which the legitimate monitors eavesdrop on the communication of several suspicious links with the help of the cooperative UAV, and accurately control the transmission rate of the suspicious links. This scene has certain effectiveness and can effectively eliminate the influence of interference signals, but the overall accuracy is low. A trajectory design problem of UAV based on actual communication link constraints is studied by Zhang et al. [4]. Under the link quality constraints of GBS-UAV link, the UAV trajectory is optimized to minimize the mission completion time and solve this challenging non-convex optimization problem. This method can achieve a flexible balance between complexity and performance, and can achieve the optimal solution in polynomial time, but ignores the signal interference problem in the process, and the results can be more accurate. Ernest et al. [5] proposed a non-orthogonal multiple access communication scheme to solve the problem of UAV communication spectrum scarcity. In the dual-variable Rician shadow fading channel, the performance analysis of UAV dual-diversity receiver NOMA assisted UAV communication system was conducted. The interrupt probability and finite SNR set gain of NOMA assisted UCS are studied by using the closed expression of joint probability density function and joint cumulative distribution function. The proposed method can support more DRONES in the related Rician Shadowed fading channel and achieve the diversity gain of effective signal-to-noise ratio. However, the proposed method has signal interference problems in practical application, which affects its accuracy.
In order to improve the anti-jamming ability of periodic stationary signal of UAV communication, the virtual reality technology is introduced into the field of UAV communication to model and analyze the anti-jamming ability of UAV communication cycle stationary signal. Virtual reality is the product of combining computer technology and thinking science to a certain extent. Its most important feature is that users can interact with virtual environment in a natural way, and can transform abstract and complex concepts and scenes in reality into intuitive content that can be accepted by people. To apply virtual reality technology in communication field, can greatly improve the operating mechanism in the process of communication, such as the application of virtual reality in the field of border troops of communication technology, can increase work efficiency of army information technology, strengthen the forces of the information technology management ability, fundamentally improve the border troops of the security and reliability of the communication technology. Virtual reality technology is applied to the interference model of UAV communication cyclic stationary signal in order to improve its anti-interference ability.
UAV communication cyclostationary signal acquisition method based on virtual reality technology
Visual reconstruction of UAV flight 3D scene
Before collecting the closed-loop synchronization signal of UAV communication, it is necessary to reconstruct the 3D visual model of UAV flight scene. Let the intelligent learning objective function of UAV flight 3D scene visualization reconstruction be:
In the formula,
After the objective function of intelligent learning is determined, the process of enhancing the virtual scene of UAV flight is realized. To perform virtual scene enhancement for UAV flight, the iterative method of enhancement process is:
In the formula,
Under the control of the visual image fusion algorithm, the virtual reality technology is used to perform the fusion processing of the UAV flight scene information. In the fusion Eq. (1), the 3D scene visualization reconstruction feature points of the UAV flight are set as
The 3D distribution attribute value of the UAV flight environment
Then there are:
Let
In the formula,
In the formula,
Firstly, to construct the m-sequence of broadband wireless communication information, such as flight altitude, flight speed, measurement and control frequency band, data transmission rate and measurement and control action range, we must first construct the linear shift register that generates the m-sequence, and first determine its primitive polynomial. The logical structure of the register is shown in Fig. 1.
M sequence generator.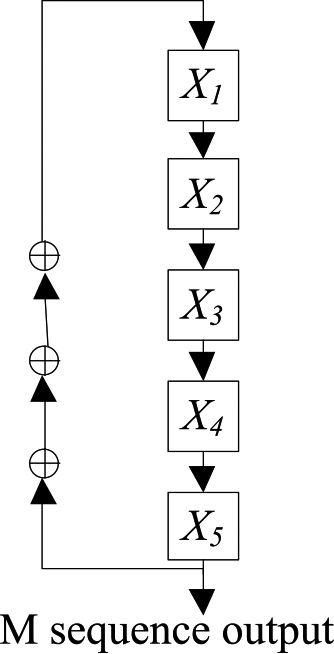
The m-sequence of broadband wireless communication signal data is generated by the m-sequence generator in Fig. 1.
The maximum possible period of the sequence generated by the sequence generator composed of N-level shift registers is 21 nl. Under a certain n, the sequence with the largest period is called the maximum length sequence, also known as m sequence [7, 8]. The autocorrelation characteristic curve of m sequence is a periodic triangular curve with sharp correlation peak, as shown in Fig. 2.
Normalized autocorrelation curve of M series.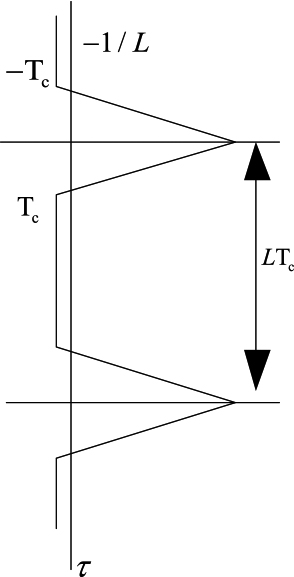
In Fig. 2, TC is the symbol duration;
In the formula, the autocorrelation function of m sequence only has a peak when the phase difference between the two sequences is in the range of positive and negative symbols, showing sharp autocorrelation characteristics. Therefore, it is possible to judge whether the relative positions of the two sequences in the three-dimensional UAV flight scene are within a positive and negative symbol according to whether the correlation output has a peak value [9, 10], so as to calculate the power spectral density between multiple symbols
In the formula,
Its discrete spectrum can be rewritten as:
In the formula,
Through the above series of formulas, the characteristics of m-sequence of broadband wireless communication data can be obtained, and the best m-sequence can be determined according to its characteristics.
In the process of data processing, multi-objective particle swarm optimization algorithm is applied, which can efficiently process and plan the information of the interference factors in the three-dimensional scene of UAV flight. It is assumed that the UAV communication signal interference factor group in the three-dimensional scene of UAV flight has n interference factors. In the process of UAV exploring the interference factor space, each interference factor in the interference group can be considered as the interference factor in the UAV exploration space [12, 13]. If one of the interference factors is I, the interference factor marked by UAV can be expressed as:
According to the algorithm of multi-objective particle swarm optimization, it is necessary to calculate the local position of the interference factor in the off-site environment according to the corresponding objective function , and constantly update the optimal position of the interference group in the process of UAV’s identification of the interference factor X. The best position of the interference group can be expressed as:
In the multi-objective particle swarm optimization algorithm, particles have certain mobility, substitution can be generated between particles, and off-site factors can also have substitution relationship. The new interference factors replace the original interference factors, and the new interference factors have certain genetic characteristics. The basis of interference factors will be replaced with the transmission of other factors. The substitution of interference factors can be defined as:
In the formula,
In the UAV communication channel, due to the complexity of the wireless channel, especially the large Doppler frequency spread caused by relative motion and multipath, resulting in inter symbol interference, it is necessary to expand the transmission signal with pseudo-random sequence, compress the signal when receiving, and spread the power of the interference signal, so as to improve the anti-interference ability of the system, control the time and duration of pulse transmission. Therefore, the performance of pseudo-random sequence is directly related to the performance of the whole broadband wireless communication system.
Signal compression performance analysis of pseudo-random sequence
The cyclostationary signal data extracted from the three-dimensional flight scene of UAV is represented by a quad, and the specific expression is as follows:
In the formula,
In the formula,
In order to adapt to the improvement of UAV data transmission capability, the measurement and control frequency band of UAV is also improved. The TT & C frequency band gradually transits from the previously commonly used low-frequency band such as l and s to high-frequency band such as C band. By substituting the frequency band signal attribute parameters into the quad, the estimated value of communication protocol attribute of pseudo-random sequence can be obtained [16, 17]. During the operation of UAV Communication Network, the protocol processing process is mainly completed by computer processor. Therefore, the signal compression performance is subjective and uncertain, and
In the formula,
In the formula,
In the formula,
According to Eq. (12), several components in
The UAV communication channel is a multipath channel, and the channel characteristics are time-varying. If the traditional adaptive equalization technology is adopted, the training sequence should be sent periodically to track the changes of the channel. Although this can improve the reliability of data transmission, it will reduce the communication efficiency [18, 19]. Therefore,
If the UAV Communication sending node is set as up-send, its upper layer protocol processing and queuing delay is expressed as
In the formula, the accurate value of network delay
In the formula,
In the formula,
Let the correlation coefficient at the anti-interference of the
In the formula, variables
By substituting the calculation result in Eq. (16) into Eq. (17), the specific value of the correlation degree between any two attributes can be obtained, and the transmission node queue model with multi service level and packet network requirements is introduced, as shown in Fig. 3.
Adaptive multi-level queuing model.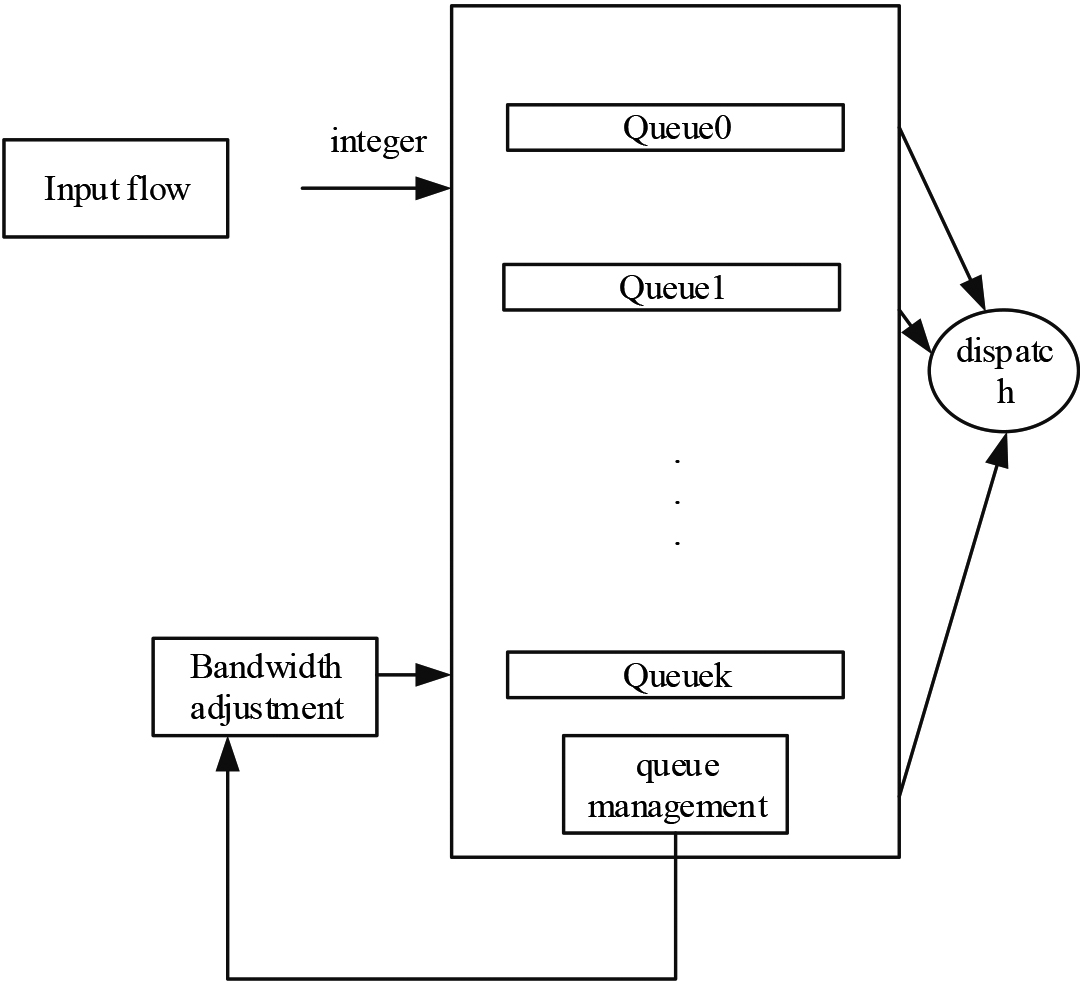
In Fig. 3, the bandwidth is adjusted through multi sequence transmission node queue management and scheduling. However, if only different queues are prioritized, the key services can be processed first. However, when the packet rate of high priority is always higher than that of the interface, the packet of low priority will not be sent [20]. In order to solve this problem, MPLS VPN structure is used to connect the priority of queue with the available bandwidth. The working process of MPLS VPN is as follows:
MPLS VPN working process.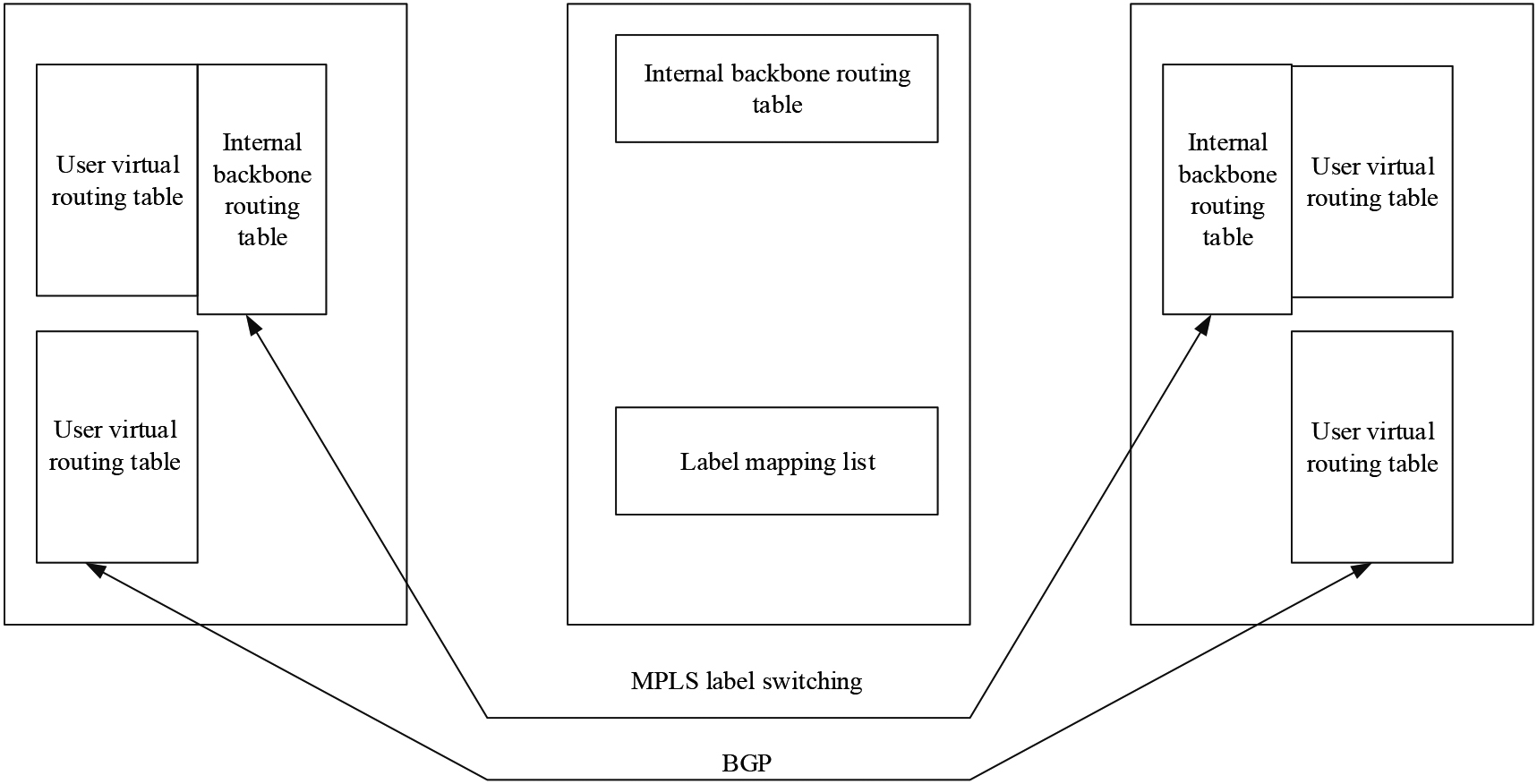
In MPLS VPN architecture, each event handler is a state. In this state, the processing details can be further refined by using sub processes. When the processing is completed, it returns to the state transition process. In this process, it interrupts the state transition process to continue or arrange the execution of the new process, which not only ensures the priority of key businesses, but also avoids excessive restrictions on non key businesses. However, in the process of calculating the correlation degree, it is also necessary to judge whether the following relationship is valid.
If Eq. (8) is satisfied
In the formula,
In the formula,
Experimental object, data and process
The UAV used in this experiment is a four rotor aircraft, and the structure is shown in Fig. 5.
Structure of four rotor aircraft.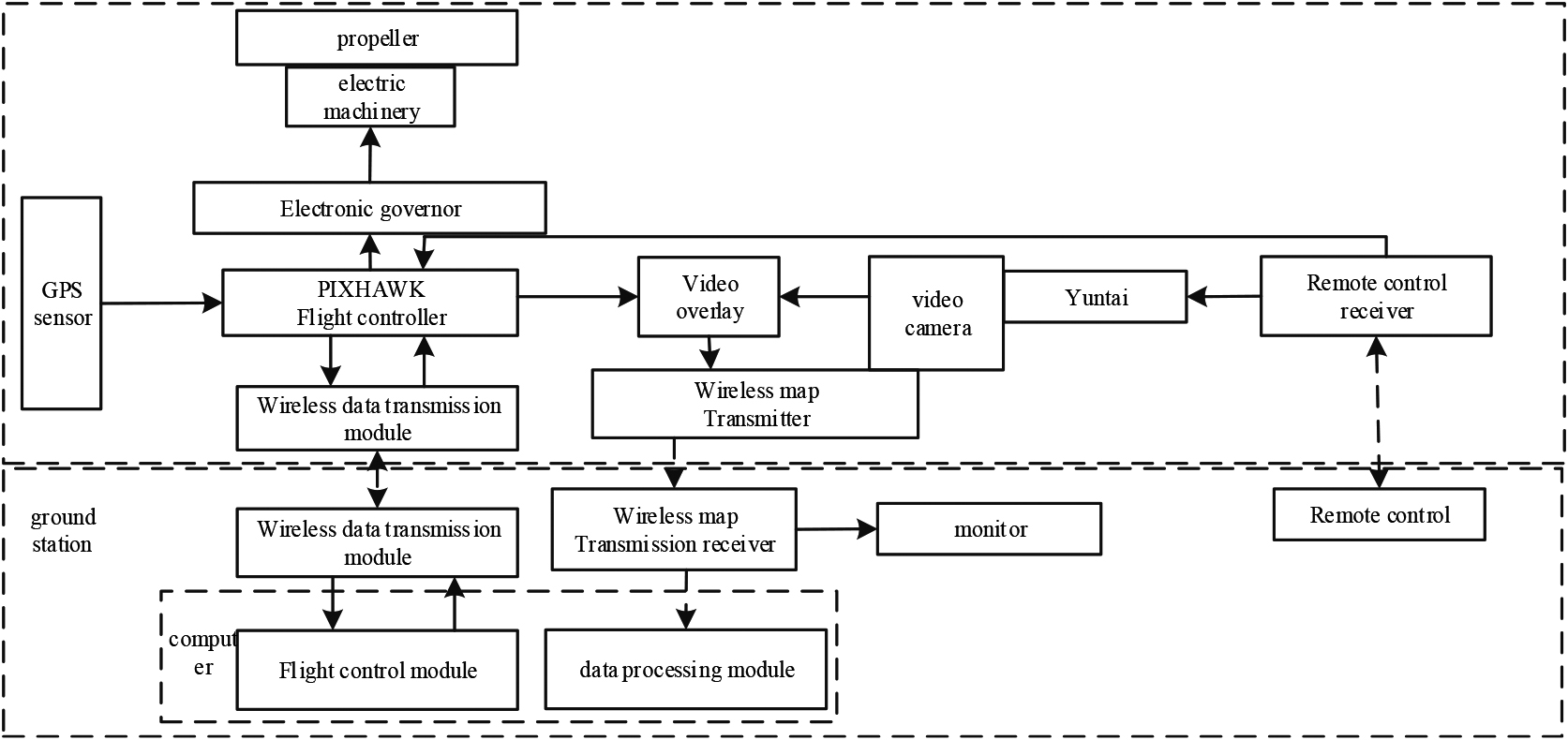
First of all, if you need to close the special operation, you need to pan, camera and UAV to achieve three-axis switch between rotation, this time you need to use remote control for control operations. In the hardware part, the 5.9G33 mosaic analog picture transmission system realizes the wireless image transmission function, and the effective transmission distance of the system is 3.5 km. If the ground station is equipped with antenna receiving equipment, the transmission range can be expanded to 10 m, and the wireless digital transmission is realized by using the XTEND900M/1W digital transmission radio station. The maximum digital transmission distance of the hardware is close to 65 m, and the 35 A brushless electronic governor is used as the power system of the UAV, and the maximum power is close to 580 W. Visible light camera and 3840
Secondly, check the running status of UAV and other equipment, test the related equipment, perform the self-check and equipment calibration function of the operating system to ensure the stable and reliable operation of the software system.
Finally, in order to judge whether the transmitted information has interference or not, it is necessary to start the natural scene interference simulation module to simulate the signal transmission content.
The flight status of the UAV is controlled and the data transmitted by the sensor is coordinated. The 3D model of the construction site is rendered by mobile devices and VR tools, and the scene panorama is summarized into interactive dynamic panorama files, which are imported into mobile devices as experimental data through the network platform.
In order to analyze the interference of the UAV’s remote control signal better, the experiment is based on the maximum natural modal components that can be output, that is, multiple different modes with frequencies of 10 to 50 Hz, the results of analysis in time domain and extraction of natural modal components are obtained.
Time domain diagram of oscillating signal.
The reconstruction result of the oscillating signal.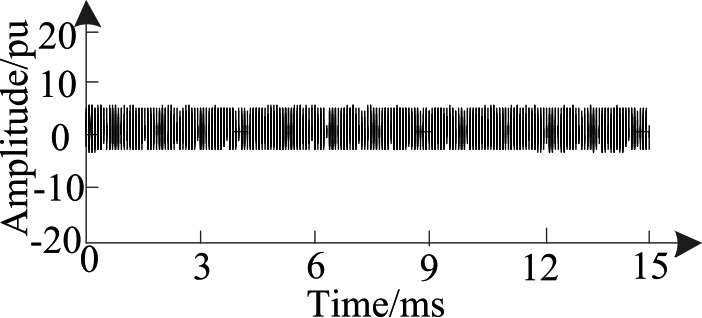
In Fig. 7, if the anti-jamming of the UAV communication cyclostationary signal is weak, it will cause the signal leakage of the interference signal at its multiplier, while the time domain diagram of the oscillating signal and the reconstruction result of the oscillating signal do not produce obvious The signal fluctuates, and the amplitude fluctuation is not large, indicating that the channel impulse response and frequency domain response are not large, indicating that the UAV communication cyclostationary signal has good anti-interference.
The UAV communication network is susceptible to interference, which leads to the problem of reduced reliability and throughput. In this regard, with the constraints of aerial flight scenarios, take-off and landing scenarios, and mission area flight scenarios, input 105 dB Gaussian white noise interference, and analyze the throughput of the anti-jamming communication of the UAV flight system under different conditions, the specific results are shown in Fig. 8.
Comparison of network real-time throughput of three methods.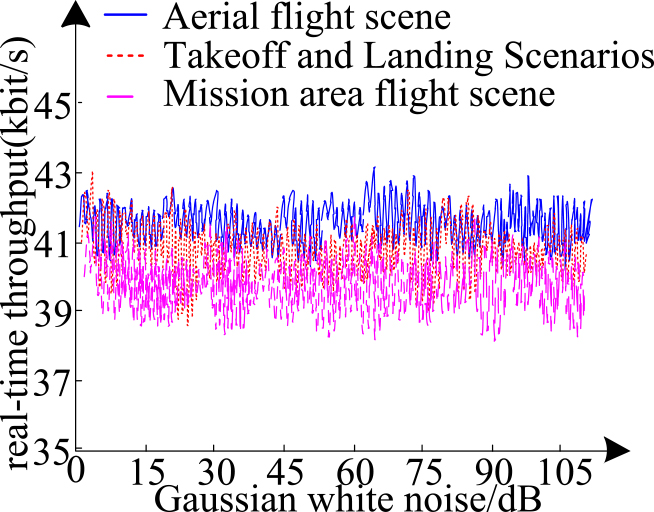
According to the results shown in Fig. 8, in different scenarios, the network throughput is basically stable between 38 and 43 kbit/s, and the throughput after convergence is stable. This is because the method uses the maximum negative entropy FastICA algorithm to analyze the signal compression performance of the pseudo-random sequence to ensure that during the operation of the UAV communication network, after the interference signal power is diffused, the throughput is stable and the UAV communication cycle is stable Signal anti-interference is good.
The constraints are set as follows: (1) The transmitted signal satisfies the independent and identical distribution, and obeys the zero-mean sub-Gaussian distribution. Note that the uniform distribution is a special case of the sub-Gaussian distribution. (2) The equalizer tap coefficient is infinitely long. (3) The channel is not disturbed by noise. (4) The channel transfer function has no zero point on the unit circle, that is, the frequency response of the channel has no zero point. The method of Literature [5], Literature [6] and the method of this paper are used to compare, and the anti-jamming performance of UAV communication cyclostationary signal is analyzed when the number of data packets is different. The results are shown in Table 1.
Evaluation methods of delay control effect of different methods
It can be seen from Table 1 that with the increase of data packets, the correlation degree of the method in this paper is all 0, which means that one of the two attributes of the anti-interference degree of the two UAV communication cyclostationary signals with high correlation degree can be eliminated, and no The redundancy of the analysis process of the anti-interference degree of the cyclostationary signal of human-machine communication, because the method in this paper analyzes the flight altitude, flight speed, measurement and control frequency band, data transmission rate and measurement and control range, etc., through the cyclostationary signal processing anti-interference analysis model, the construction process of the UAV, combined with the introduction of the transmission node queue model of multi-service levels and packet network requirements, directly analyzes the performance of the pseudo-random sequence, and then determines the anti-jamming performance of the UAV communication cyclostationary signal in a targeted manner.
In this paper, in order to reduce the redundancy in the analysis of UAV communication cyclic stationary signal, an anti-jamming modeling and analysis method of UAV communication cyclic stationary signal based on virtual reality technology is proposed. For unmanned aerial vehicle (UAV) flight through visualization and reconstruction of 3D scene using the maximum negative entropy FastICA algorithm and acyclic stationary signal processing algorithm constructs a model of cycle stationary signal anti-jamming, oscillation in the time domain signal by using signal processing model figure and oscillation signal reconstruction results, analysis of UAV communication anti-jamming performance of cyclostationary signal. In this paper, the experimental results show that: under the application of virtual reality technology, unmanned aerial vehicle (UAV) communication cycle stationary signal no obvious fluctuation, explain application of the method of anti-jamming is strong, can effectively reduce the interference between signals, improve the reliability of receiving data, research on UAV communication anti-jamming of cycle stationary signal has a certain reference role, give full play to its practical application value. However, there is still room for improvement in the research content of this paper. When the initial error is large, the algorithm cannot converge. Therefore, this paper only studies the ground TT&C base station of UAV, and subsequent research can be carried out under the TT&C base station at sea or in the air to obtain more comprehensive results.
Footnotes
Acknowledgments
The research is supported by: The Natural Science Foundation of Jiangsu Province in 2015: Research on Key Nodes Identification in abnormal state of Urban Complex Transportation Network (No. BK20151464).