
Abstract
In order to improve the effect of landscape design, based on the traditional multi-dimensional nonlinear landscape design and RBF neural network, this paper proposes and designs a multi-dimensional nonlinear landscape design method based on neural network. Firstly, the camera parameters are set, the landscape images are collected by UAV, and the collected landscape images are segmented. Landscape image features are extracted according to different classification criteria, and the feature information is used as training samples to train the neural network. Finally, the landscape design parameters are fitted and the results of the landscape design model are output. The experimental results show that the proposed method has better classification accuracy than the other two traditional landscape image classification algorithms. In different experiments, the landscape image classification accuracy of this method is kept above 85%, while the other two methods are lower. In addition, the regression analysis value and test value of this method also perform well. Finally, given a noisy image, it is found that the text method can effectively remove the noise in the landscape design image, making the image present a clearer landscape layout.
Introduction
Nonlinear landscape is a landscape system composed of highly continuous and gradual, random, irregular, free flowing, irregular and uneven forms [1]. This nonlinear result comes from the material form of nonlinear superposition of all multidimensional, continuous or discrete influencing factors in the spatial area of the landscape system [2]. The nonlinear form seems to have no rules to follow in the micro dimension, but it follows the unified internal logic in the macro level [3]. For the nonlinear world we live in, it is easier to express the laws of nonlinear materials only using nonlinear formal language. Because the complex system of landscape is composed of various dimensions such as function, art, ecology and humanity, it cannot be summarized by a simple explanation of the consequences before, but should be analyzed from multiple perspectives [4]. The construction of ecological landscape is continuous. With the improvement of living environment, the quality standard of landscape construction is getting higher and higher. Therefore, MDNL design shall be carried out [5]. Combining the functional positioning of landscape, optimizing MDNL design structure, improving the effect of urban landscape design, and studying MDNL design methods are essential for improving the rationality of architectural landscape design and living environment [6].
Zhu and Tian [7] proposed a landscape design method based on 3D graphics processing technology. The landscape design data acquisition module uses files to read and write landscape design data, and uses resource inventory to store the basic materials required for 3D landscape design; The landscape model scene design module is based on the data obtained from the landscape design data collection module, establishes the landscape 3D model through terrain model, building model, tree planting model, etc., generates the construction drawing, and uses the coordinate matrix method of 3D graphics processing technology to render the 3D texture of the model; Through the data statistics module, the budget and project data are counted to achieve 3D landscape design. Zhang and Cheng [8] proposed a landscape design method based on airborne lidar, including landscape data collection and management module, model landscape design module and 3D landscape display module. The landscape data acquisition and management module uses airborne lidar to collect and process the basic 3D landscape data; The model landscape design module uses data, uses regular grid method to achieve terrain simulation and design, and uses LOD algorithm to complete 3D landscape rendering on the basis of improving the level of detail; The 3D landscape design effect is displayed through the 3D landscape display module. Yang [9] proposed a landscape design method based on interactive genetic algorithm. First, based on the three features of the landscape, namely the location, height and architectural texture of the wall, an open GL technology is used to develop a landscape design model, and then an interactive genetic algorithm (IGA) is used to quantify the user’s comments, and the design model is iteratively optimized based on the quantitative results until the user is satisfied with the design.
The traditional multi-dimensional nonlinear landscape design has such problems as large difference. With the continuous improvement of the ecological landscape construction standard, the traditional multi-dimensional nonlinear landscape design needs to be optimized. In order to further improve the effectiveness of multi-dimensional nonlinear landscape design, this paper proposes a multi-dimensional nonlinear landscape design model based on neural network. Firstly, the camera parameters are adjusted, and the landscape images are collected by UAV. Then the collected landscape image is segmented by directional filtering, and the super pixel gradient features are described by brightness, color and texture distribution to extract the landscape image features. The extracted characteristic information is used to train the neural network, and the classification and recognition of the trained neural network images are used to display different RGB values of different classification results. Finally, the landscape design parameters are fitted and the landscape design results are output. The innovation of the text is to use RBFNN to classify landscape images after segmentation and gradient feature extraction of landscape images to improve the effectiveness of landscape design. The research method flow chart of the whole experiment is shown in Fig. 1.
MDNL image acquisition
According to the needs of MDNL design, UAV is adopted to collect landscape images. The preset altitude for the test flight is 600 m, the preset heading overlap is 70%, the lateral overlap is 40%, and the flight range covers 9 km
Main parameters of Sony DSC-T90 camera
Main parameters of Sony DSC-T90 camera
Flow chart of research method of the whole experiment.
Seventeen routes were flown along the north-south direction, 235 images were taken, and the ground resolution of the acquired UAV images reached centimeter level. During the flight, the weather is cloudy, the ground wind force is level 2, and the gust is level 3
After the landscape image on the basis of UAV image extraction is collected, the landscape image can be generated only after image preprocessing. The specific process is shown in Fig. 2.
Landscape image generation process.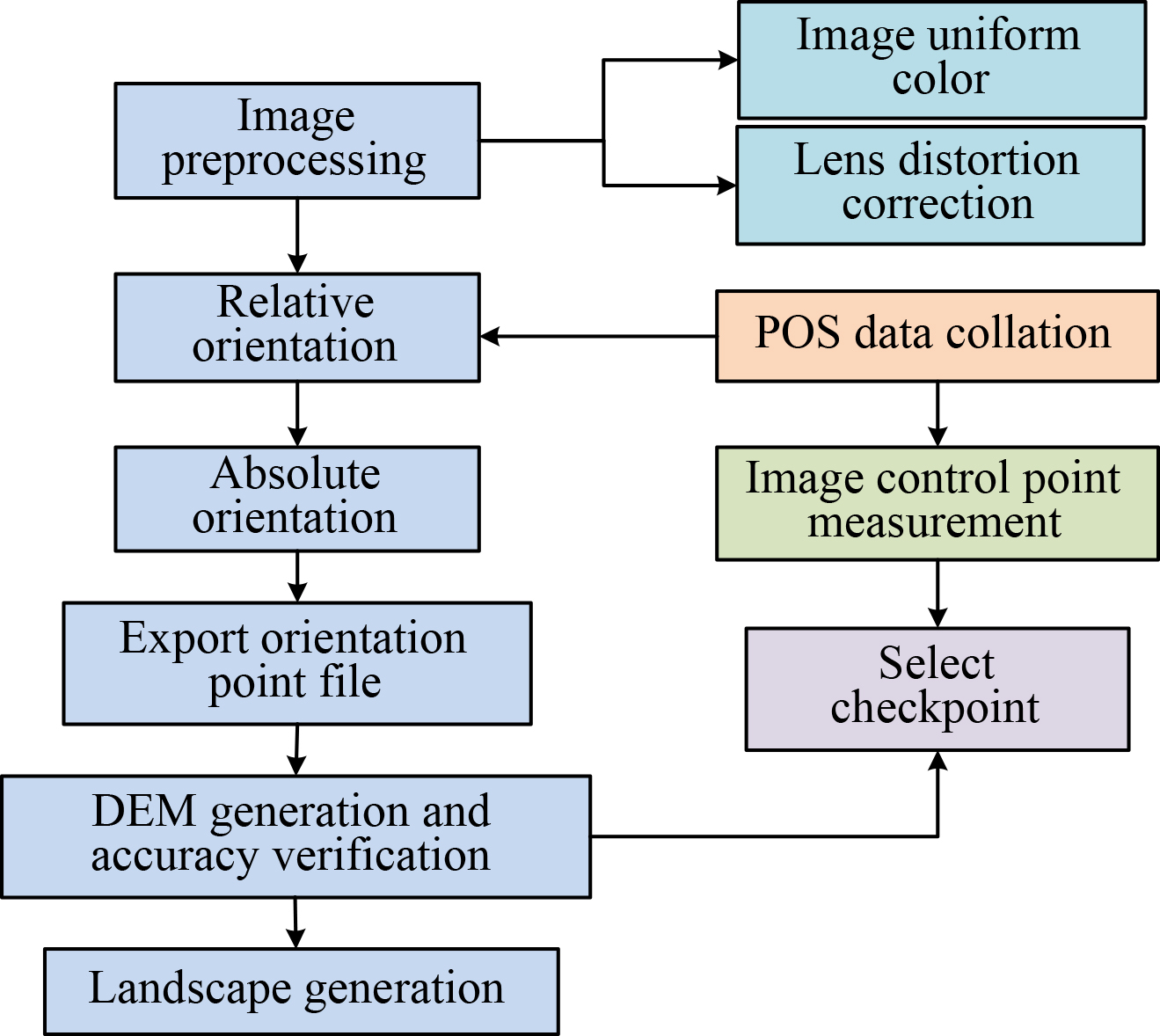
Image uniform color: there are differences in hue, gray, brightness, contrast and texture between the obtained UAV images, so the images need to be uniform color [10]. PhotoshopCS2.0 is adopted to adjust the brightness and color saturation of the UAV image to achieve the overall color consistency of the image.
Lens distortion correction [11]: the number of cameras carried by the UAV are non-measuring cameras, the measurement of internal orientation elements is inaccurate, and there is optical distortion error in the lens arrangement. Even if the focal length is fixed, the lens of the digital camera has the same impact on each image, so the phase coordinate distortion difference should be corrected.
The digital camera lens’ nonlinear optical distortion is usually divided into radial distortion [12], thin prism distortion and eccentric distortion. The radial distortion has been produced for hundreds of years. The latter two types of distortion produce both radial and tangential deviation. The comprehensive effect of lens nonlinear distortion in the system of image coordinate can be shown by the mathematical model below:
Where
Some studies have shown that if too many nonlinear parameters are introduced into lens nonlinear distortion, the accuracy will not be improved, but the solution will be unstable. At the same time, radial distortion plays a leading role in lens nonlinear distortion, so only radial distortion is usually considered, and tangential distortion is ignored. Therefore, the above model can be simplified into a comprehensive radial distortion model:
Where
After the above collection and processing, to speed up the feature extraction of landscape design, it is necessary to segment the landscape image. In the process of segmentation, a weighted undirected graph is formed by using the results of directional filtering [13], and the multi-layer image is divided by using ant colony algorithm to judge whether the normalized segmentation value of the image persists. If the judgment result is persistent, the obtained optimal image segmentation is mapped to the original image, so as to determine the final segmentation image result.
In the process of extracting landscape image gradient features [14], image brightness, color and texture distribution are used as the description of super-pixel gradient features. Therefore, the super-pixel gradient feature can be written as
Calculate in combination with Eq. (3) to obtain a weighted undirected graph, which is regarded as the constraint condition for ant colony movement:
In Eq. (4),
According to the above description, ant colony algorithm is adopted to segment the landscape image [15]. The ants in the ant colony have two modes of starting and stopping when moving, and the ants can record the movement path. If ant
In Eq. (5), a greater value of
In Eq. (6),
If the ant selects the pause state, it means that the current vertex may be the vertex dependent on image segmentation. At this time, all ant records can be cleared [16]. If the ant chooses the movement state, it needs to determine the next movement route of the ant. Therefore, heuristic information and environmental information must be considered comprehensively to determine the accurate movement route of ants. In addition, the route with larger weight shall be selected as far as possible when selecting the criteria, and the weight shall be compared in combination with the times
In Eq. (7),
According to the above equation, all ant movements or pauses once are regarded as an iterative process. If the ratio of the normalized value NCut after segmentation of the image generated after the current iteration to the result of the previous iteration is greatly improved, all EVD results need to be reduced by 1. When the value of NCut does not change, the best segmented image will be obtained. The expression of NCut is:
In Eq. (8), the best segmented image obtained is mapped to the original image to form the final segmented image, which is shown below:
In Eq. (9),
The feature extraction process on the basis of gradient normalization is shown in Fig. 3.
Gradient feature extraction process.
Step 1: calculate all pixel value gradients
Step 2: on the basis of the normalized function mapping gradient vector, obtain the gradient value
Step 3: combine
If
Figure 4 shows that the normalized matrix
Gradient difference diagram.
After the segmentation and gradient feature extraction of landscape images, RBF neural network (RBFNN) is adopted for classifying landscape images to improve the effectiveness of landscape design.
Figure 5 shows the RBFNN’s structure.
Structure of the RBFNN.
Among them, the RBFNN’s activation function is a radial basis function (RBF) with the independent variable of distance
It can be seen from the above equation that the network output increases with the decrease of the distance which is between weight vector and input vector. The neuron will output 1 in case of consistent input vector and weight vector. In Fig. 5,
Similar to multi-layer feedforward network [17], RBFNN, as a three-layer network, is composed of input layer, hidden layer and output layer. Figure 6 shows its network structure.
RBFNN structure.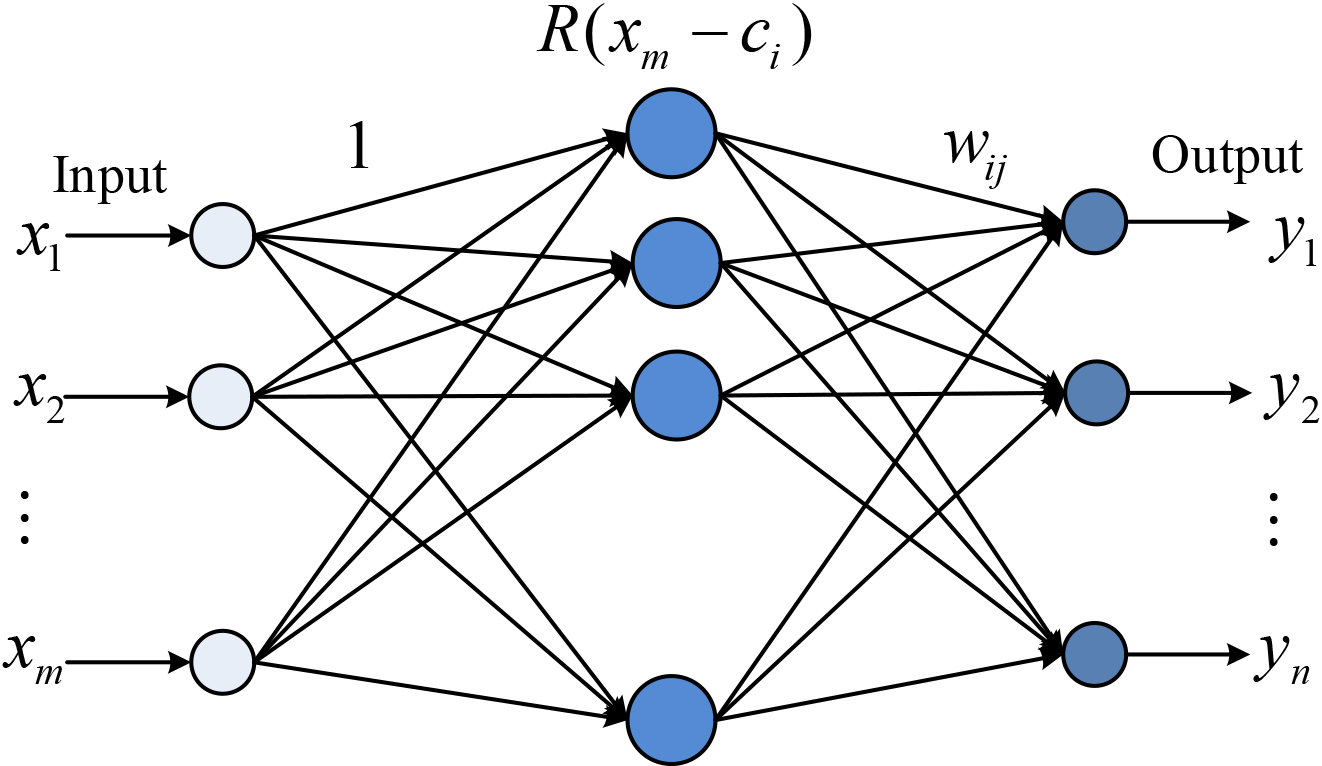
Where
Where
Where
The network output can be obtained from the RBFNN structure shown in Fig. 5:
And:
Among it,
The RBFNN output refers to the linear weighted output sum of each node in hidden layer. Among them, the weight between output layer and hidden layer is adjustable, and the following error equation is adopted to determine whether the weight should be adjusted:
Where
In this study, the self-organizing selection center method of RBFNN learning method is selected. This learning algorithm’s specific steps are shown below:
Determining the learning center: K-means clustering algorithm is often applied during self-organizing learning. K-means clustering algorithm is selected in this paper to determine the gravity center of the function; Solving variance: after determining the basis function center, the basis function variance can be solved according to the GF; Calculating weight: after determining the hidden layer parameters, the least square method is adopted to calculate the weight from the hidden layer to the output layer.
For landscape image classification on the basis of RBFNN, firstly, several pixels are extracted from the image to train and learn the RBFNN. Then, the local features of different regions of the image are identified through the RBFNN learning; Finally, the RBFNN trained is adopted to realize the classification and recognition of all pixels, and different RGB values are given to draw the image. The RBFNN’s training steps are as follows:
Step 1: the local feature vector extracted
Step 2: determining the hidden layer node’s number
Step 3: calculating the Euclidean distance
Step 4: recalculating the cluster center of
Where
If
Step 5: use Eq. (15) to calculate the GF variance
Step 6: using Eqs (16) and (17) for calculating the weight
Step 7: using Eq. (18) to make judgement on whether the conditions of training termination are met. If met, finish the training of neural network; if not, return to step 6.
After the training of neural network, using the classification results of neural network to give different RGB values to different categories of voxels to realize the classification of landscape images.
The MDNL design parameters are simulated under the spatial vision of virtual scene, and the MDNL image similarity analysis is carried out in combination with each pixel’s distribution characteristics. The landscape design’s spatial regional feature matching model expression is concluded as shown below:
The nearest neighbor phase points are expressed by matrix
Pixel
In accordance with the results of parameter simulation of MDNL design, regional reconstruction is conducted. In combination with the method of RGB feature decomposition, the extraction of parameter vectorization feature of MDNL design is performed.
Combined with the method of RGB feature decomposition, the MDNL model is parametrically segmented, and the fuzzy matching feature quantity of the MDNL image is extracted. In the inner regions and outer regions of the landscape image target edge, the parameter estimates of feature points that are significant are:
Relying on the metric learning idea, it is obtained that the parameters of 3D feature reconstruction of MDNL image obey uniform distribution, and the pixel sequence satisfies
The first-order moments
In the above equation,
The method of block template matching is used for parameterized segmentation of MDNL model to obtain the parameterized model distribution results of MDNL design [20]:
In Eq. (30),
Through parameter fitting, the research of MDNL design is completed.
To check the performance of practical application of the put forward neural network based MDNL design, performance test experiments were carried out.
This experiment adopts VC
Ninety pixels were randomly extracted from the landscape image, of which 60 pixels were randomly chosen to construct samples of training. The other 30 pixels were selected as test samples. Automatically extract the data features through pixel coordinates, such as gray value and gradient value, and construct the input vectors in training and test samples. The target output vectors are 0 and 1, representing categories respectively. To facilitate the neural network training, the characteristic data are normalized to (0, 1) intervals. The main data information of training samples is shown in Table 2.
Training sample data information
Training sample data information
Initialize the neural network, and determine that there are 3 hidden layer nodes of the neural network, and 1 output layer nodes. Input the samples into the neural network after training and learning, and save the network parameters as shown in Table 3.
Parameter information of neural network
Accuracy of landscape image classification as the classification of landscape image plays a vital role in the final landscape design results, the landscape image classification accuracy is taken as the test index. The method proposed here is compared with the methods mentioned in References [7] and [8]. In Fig. 6, the comparison results of landscape image classification accuracy of the three methods are presented.
Figure 7 shows the classification accuracy results of landscape images under the three algorithm models. According to the results of landscape image segmentation accuracy in Fig. 7, in many experiments, the landscape image segmentation accuracy of this method is always higher than that of the methods mentioned in the two literatures. The landscape image classification accuracy of the method in this paper is always above 85%, while the landscape image classification accuracy of the method proposed in Reference [7] and Reference [8] is low, and in different experiments, the classification accuracy is quite different. The highest accuracy can reach 68%, but the lowest accuracy can even be less than 20%. Therefore, compared with the three methods, the multi-dimensional nonlinear landscape design model based on RBF neural network can more accurately classify landscape images.
Test regression analysis and test value
Parameters such as regression analysis value and inspection value are tested. See Table 4 for the results.
Regression analysis value and test value
Regression analysis value and test value
Landscape image classification accuracy results.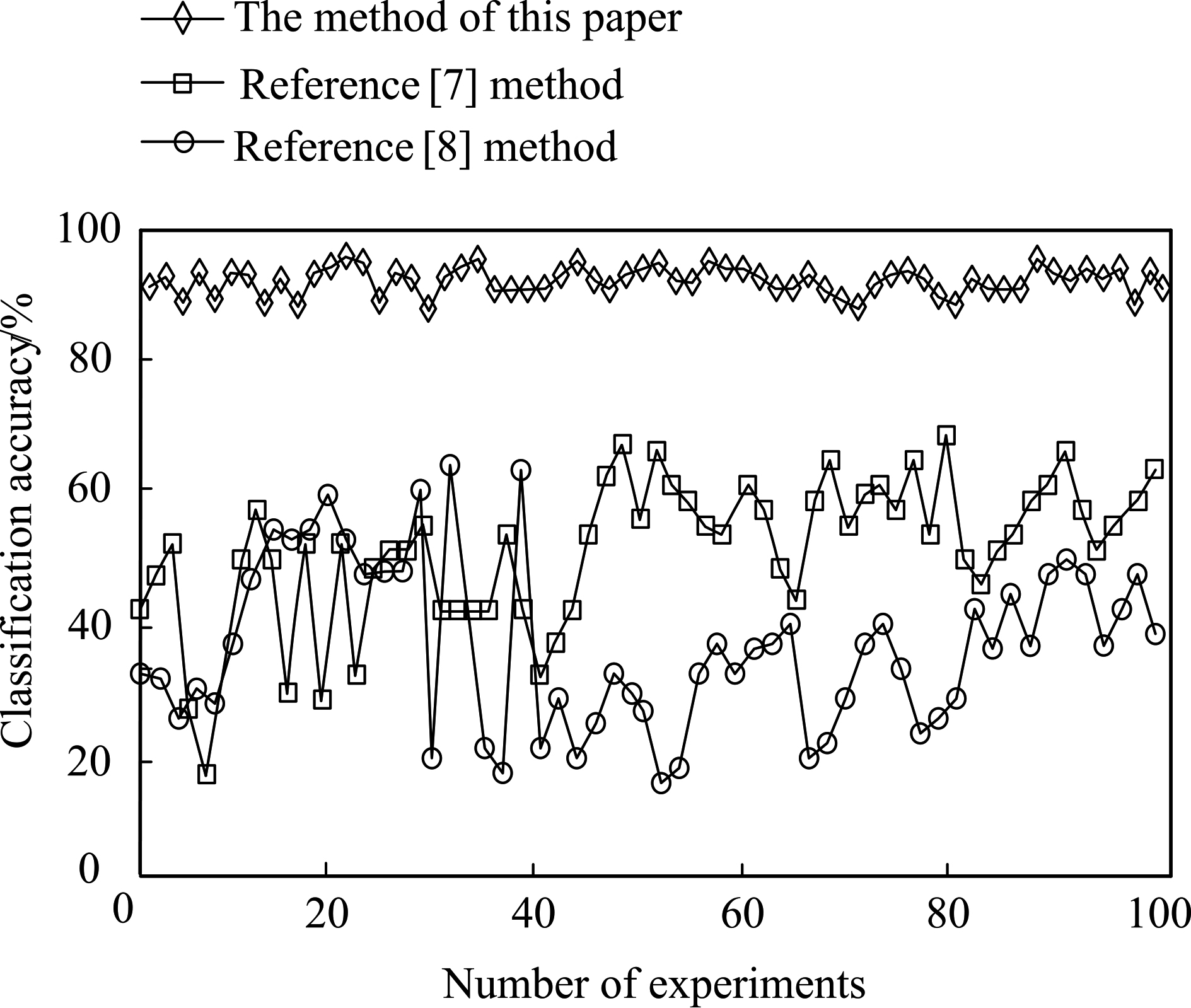
Table 4 shows the regression analysis values and test values of this model under different measurement variables. A total of eight indicators are selected: Landscape planning structure, Habitat satisfaction level, Environmental risk benefit, Ecological improvement level, Landscape construction scale, Decision evaluation value, Overall planning allocation efficiency, and Regional standard deviation. The Mean value, Standard value, and
In order to further verify the effect of the algorithm model proposed in this paper in landscape image optimization design, Fig. 7 shows a noisy landscape design image. Based on the noisy landscape design image shown in the figure, the method proposed in this paper and the method in Reference [7] and Reference [8] are respectively used to optimize the landscape design image in Fig. 8.
Noisy landscape design image.
Figure 8 shows the original noisy landscape design image. It can be seen from the original image that the quality of the image is low, and each landscape building cannot be well identified with the naked eye. There are large black areas in the image, and various landscape buildings are mixed together. Therefore, the landscape design image needs to be further optimized to obtain a higher definition image.
Landscape design image optimization effect.
Figure 9 shows the optimization effect of the landscape design image in Fig. 8 under three different algorithm models. According to the landscape design image optimization effect in Fig. 9, among the three algorithm models, the multi-dimensional nonlinear landscape design model based on RBF neural network proposed in this paper has better image optimization effect. The optimization effect of this method is better than that of the three methods, which can effectively remove the noise in the landscape design image and make the image present a clearer landscape layout. Using the optimization method in Reference [7] and Reference [8], landscape design images still have the characteristics of high noise. Among them, the image under the Reference [7] method has the feature of overexposure, and the entire image has a large area of overexposure pictures. The image under the Reference [8] method is optimized on the basis of the original image, but compared with the method proposed in this paper, the optimization effect still needs to be further improved.
In this study, a multi-dimensional nonlinear landscape design model based on RBF neural network is proposed. This design model collects remote sensing image data of multi-dimensional nonlinear landscape design, and carries out image segmentation and feature extraction. The feature extraction results are classified into landscape images using neural networks. After classification, the multi-dimensional nonlinear landscape design parameters are fitted to output the final landscape design results. The experimental results show that the classification accuracy of landscape images under three different design models is always above 85%, while the classification accuracy of the other two methods is between 20% and 68%. The regression analysis values and various test values under the model are tested, and good results are obtained. Finally, given a noisy image for optimization, it is found that the proposed multi-dimensional nonlinear landscape design model based on RBF neural network has better image optimization effect. The optimization effect of this method is better than that of the three methods, which can effectively remove the noise in the landscape design image and make the image present a clearer landscape layout. It shows that the optimization effect of its landscape design image has been significantly improved. The MDNL design using this method has strong visual feature expression ability, and the landscape design effect is good.
In order to further prove the effectiveness of the method proposed in this study, more test data should be added. At the same time, the article lacks the comparison of other similar algorithms. The future research direction can explore the different effects of similar neural network structure on multi-dimensional nonlinear landscape design.