
Abstract
With the improvement of the national living standard, the buyers have higher and higher requirements for the rationality and aesthetics of the spatial planning and layout of the residential area. The traditional residential space planning method is purely manual design, which is inefficient, and the design effect will be greatly affected by the designer’s work experience and personal aesthetics. Therefore, this research attempts to combine Pareto solution set and piecewise prediction idea into genetic algorithm, propose an algorithm for solving multi-objective optimization problems, and build an intelligent housing environment planning system based on this. The statistical results of simulation experiments show that the system can output more design schemes with better overall quality than the comparison system and manual planning results, and the stability of multiple operations is higher. When the number of iterations reaches 200, the average value of Pareto optimal solution number and optimal solution quality index QPS of the former is 44 and 0.41, respectively. The expert group analyzed the design results of this method and the manual method for an actual case, and found that the results designed by this method met the requirements and the calculation efficiency was much faster than manual processing. From the simulation test data and the actual case analysis, it can be seen that the intelligent housing environment planning system designed in this study is helpful to improve the efficiency of residential space design and the stability of residential space scheme style.
Keywords
Introduction
The current mainstream housing design method at home and abroad still relies on designers’ manual design, and the disadvantage of this method is that the quality of the design scheme will be greatly affected by the designer’s own skills, knowledge, ability, and aesthetic style [1]. For companies with poor operational strength and unable to hire high-level designers, the level of their housing environment design will be significantly limited, thus being at a disadvantage in the industry competition [2]. Therefore, the head companies in the industry have the competitive advantage of high-end services, resulting in the need for the consumer side to pay an additional premium for this, which is not conducive to the long-term development of the industry and the international transformation of domestic companies [3]. The multi-objective optimization system for housing environment built based on intelligent algorithms can fix the design concept and design style of excellent, even top designers in the form of a program and process the same work in bulk at a lower cost and expense. This is of great significance to improve the overall design quality of the housing environment design industry [4].
In this study, we propose a Pareto-based solution set feature point acquisition method to replace the original solution set feature point acquisition method in the genetic algorithm, in order to address the problem that the computational complexity increases significantly and the stability of the algorithm decreases when the computational environment changes. Specifically, we first sort the individuals in the population according to the ascending
Related works
In order to achieve the environmental design goal of quickly and accurately meeting the needs of residents, people have carried out a lot of research before. Takebayashi and Kyogoku [5] evaluated the radiation environment by checking the reconstruction buildings in front of Osaka Central Station, and calculated the spatial distribution of solar radiation shadow using ArcGIS and building shape data, from which the heat dissipation capacity of the design scheme of civil residential environment in front of the station was optimized. Clarissa et al. [6] found that the heat dissipation capacity of residential buildings in humid and hot climate is worse than that of residential buildings of the same type but in other climate zones. Therefore, priority and thermodynamic analysis software were used to analyze the heat dissipation of residential buildings in this environment, and the building environment was optimized based on the analysis results. The simulation analysis results showed that the heat dissipation speed of residential buildings after optimization was significantly improved. Ade-Ojo [7], in order to understand the impact of construction habits of construction workers on the construction results of residential environment, chose a civil residential project under construction in Nigeria as a case, and selected several groups of construction teams with different construction habits to carry out construction in different areas of the project. The analysis of the construction results shows that the construction environment completed by the construction team with higher spatial aesthetic ability has higher aesthetic value, and the functional requirements of the environment also meet the design requirements.
The intelligent algorithm represented by the genetic algorithm has been widely applied to multi-objective optimization problem solving in various industries by domestic and foreign scholars due to its advantages of low difficulty in understanding and high quality of output solution. Alpman [8] designed a power generation for small wind turbine efficiency method. The method is implemented based on an improved multi-objective optimization algorithm, and the wind tunnel test results show that the algorithm is effective in improving the power generation efficiency of small wind turbines.
Dovgan et al. [9] has redesigned the algorithm for discovering driving strategies in order to overcome the drawback of high computational time complexity of driving strategy multi-objective optimization algorithms in the market, which does not allow real-time optimization, and obtained the real-time multi-objective optimization algorithm for discovering driving strategies (MODS-RT). The MODS-RT algorithm has been tested on data from real-world routes and compared with MODS and traditional single-objective algorithms with the goal of discovering better intelligent driving strategies. Although MODS-RT found poorer driving strategies than MODS, it found better driving strategies than the single-objective algorithm, thus demonstrating that the multi-objective approach can be effectively applied to real-time discovery of driving strategies. Xu et al. [10] designed a decomposition-based harmonic search algorithm (called MOEA/D-HSA) in order to deal with the multi-peak multi-objective optimization problem (MMOP). In MOEA/D-HSA, multiple individuals assigned to the same weight vector form a subgroup for finding multiple different Pareto optimal sets (PSs). Then, an environmental selection method based on greedy selection is designed to dynamically adjust the subpopulation size to maintain population diversity. Finally, an improved harmonic search algorithm and an elite learning strategy are used to balance population diversity and convergence. Experimental results on the CEC 2019 test suite show that MOEA/D-HSA outperforms some state-of-the-art algorithms. Li et al. [11] proposed an end-to-end framework for solving multi-objective optimization problems using deep reinforcement learning (DRL). It was found that once a trained model is available, it can be extended to newly encountered problems without retraining the model. The solution can be obtained directly by performing a simple forward computation on the neural network, and experimental results show that the method has high generalization capability and fast solution speed compared with existing multi-objective optimization methods. Wang et al. [12] proposed a derivative-free linear feasible direction model with backtracking search technique for solving nonlinear multiobjective optimization problems. The numerical experimental results showed that this algorithm can improve the quality of the output solution of nonlinear multiobjective optimization problems compared with the traditional genetic algorithm.
To sum up, many intelligent algorithms, including genetic algorithms, have been widely used to solve various multi-objective optimization problems in real life. However, there is no improvement on the shortcomings of genetic algorithms, such as the diversity and instability of genetic algorithms and the slow convergence process, which easily leads to insufficient accuracy of the results calculated by the algorithms. Moreover, the research on applying intelligent algorithms to housing environment planning and space design is also very rare. However, this application may have a significant impact on improving the overall design level and design efficiency of the industry, so it is necessary to carry out this research.
Design of housing environment planning method based on improved multi-objective intelligent algorithm
Multi-objective optimization algorithm design incorporating Pareto solution set and segment prediction
Most of the traditional housing environment optimization models are centered on genetic algorithms, but the optimization magnitude of such models is insufficient and the quality of optimization results needs to be improved [13]. Therefore, this study attempts to construct a multi-objective optimization algorithm based on Pareto solution set and segmented prediction methods for composing an intelligent planning system for housing environments, the latter will be presented in the next section.
The housing environment’s spatial planning needs to consider the cost, space, practicality and other objectives, which belongs to the dynamic multi-objective optimization problem. At present, static multi-objective algorithms are mostly used as the framework for solving [14]. However, the current commonly used dynamic multi-objective optimization algorithms have the disadvantages of unstable diversity of solutions and slow convergence process. As a classical optimization algorithm, the genetic algorithm is widely used in all walks of life. However, due to its own more or less of the above shortcomings, it is not suitable for directly solving the optimization problem of housing environmental planning and design in this study. Therefore, a multi-objective optimization algorithm integrating Pareto solution set and subsection prediction is proposed in this study [15]. The basic framework of the improved algorithm is the non-inferior ranking genetic framework, because this algorithm has the advantages of simple calculation logic, superior performance and fast calculation speed, and is more suitable for solving multi-objective optimization problems. In this study, prediction is used to deal with the problem of dynamic multi-objective optimization. When the algorithm detects the change of the calculation conditions, the Pareto optimal solution of the evolution output at the previous time is sorted according to the objective function value and divided into three segments, and then the moving direction of the center point of the solution set of each segment is calculated. The algorithm also systematically samples each Pareto subset to obtain feature points, and is used to predict the population of subsequent generations. Finally, according to the difficulty of the problem to be solved, the algorithm will automatically generate some individuals randomly in the surrounding space of the predicted population to improve the genetic diversity. When the algorithm detects that the calculation parameters have not changed, the guidance individual can be inserted to improve the convergence speed of the algorithm. The improved algorithm is designed in detail below.
When the computational environment changes, a large amount of historical data needs to be used in order to predict the Pareto solution set, and to reduce the complexity of the algorithm needs to extract the optimal frontier of feature points from the dataset [16]. Traditional feature point extraction methods are either too complex or not stable enough, so now a novel method for obtaining feature points of Pareto solution set is proposed, which obtains the required feature points by using systematic pump-and-place in the target space.
Where,
According to Eq. (2), the direction of movement of the population at
Where
The other two subsets of population centers were calculated by formulas similar to Eq. (4). In the improved multi-objective optimization algorithm, a linear prediction model is chosen to reduce the computational effort of prediction. If the computational environment remains unchanged, individuals that play a leading role can be added to the population to speed up the convergence of the algorithm, and the leading individuals are generated through Eq. (5) that
In Eq. (5), iter represents the number of iterations of the population, and
Where
In Eq. (7),
Computational flow chart of multi-objective optimization algorithm incorporating Pareto solution set and segmental prediction.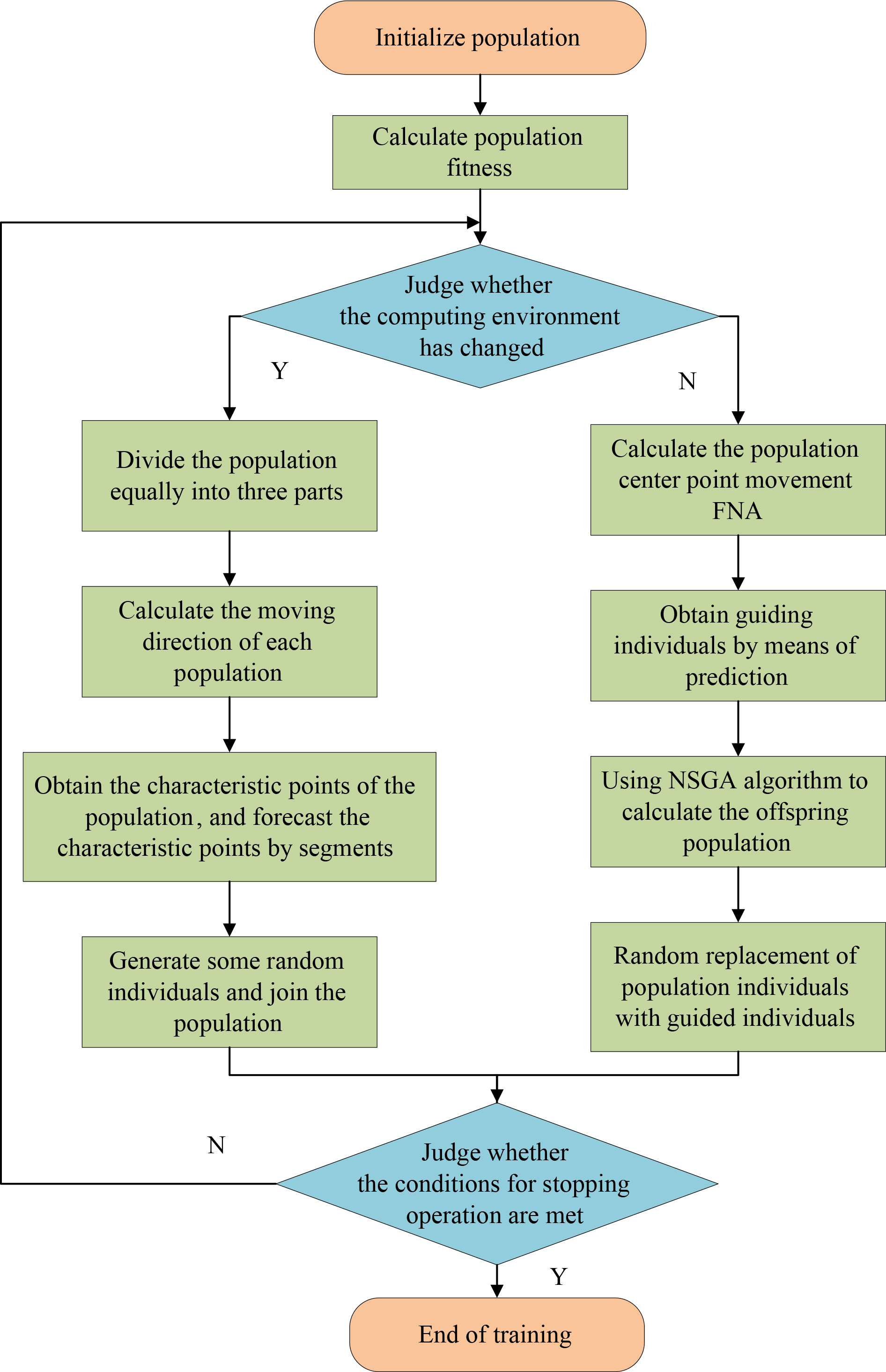
The process in Fig. 1 is shown clearly and does not need to be described. The common dynamic multi-objective optimization algorithm used in this study, the non-inferiority ranking genetic algorithm (NSGA for short), is described below [19]. This algorithm is simpler and more efficient than the more traditional dynamic multi-objective algorithms, so it is widely used. It should be noted that NSGA uses Eq. (8) to calculate the crowding distance of an individual
In Eq. (8),
Where
Where
Where
In Eq. (12),
Classical NSGA algorithm calculation flow chart.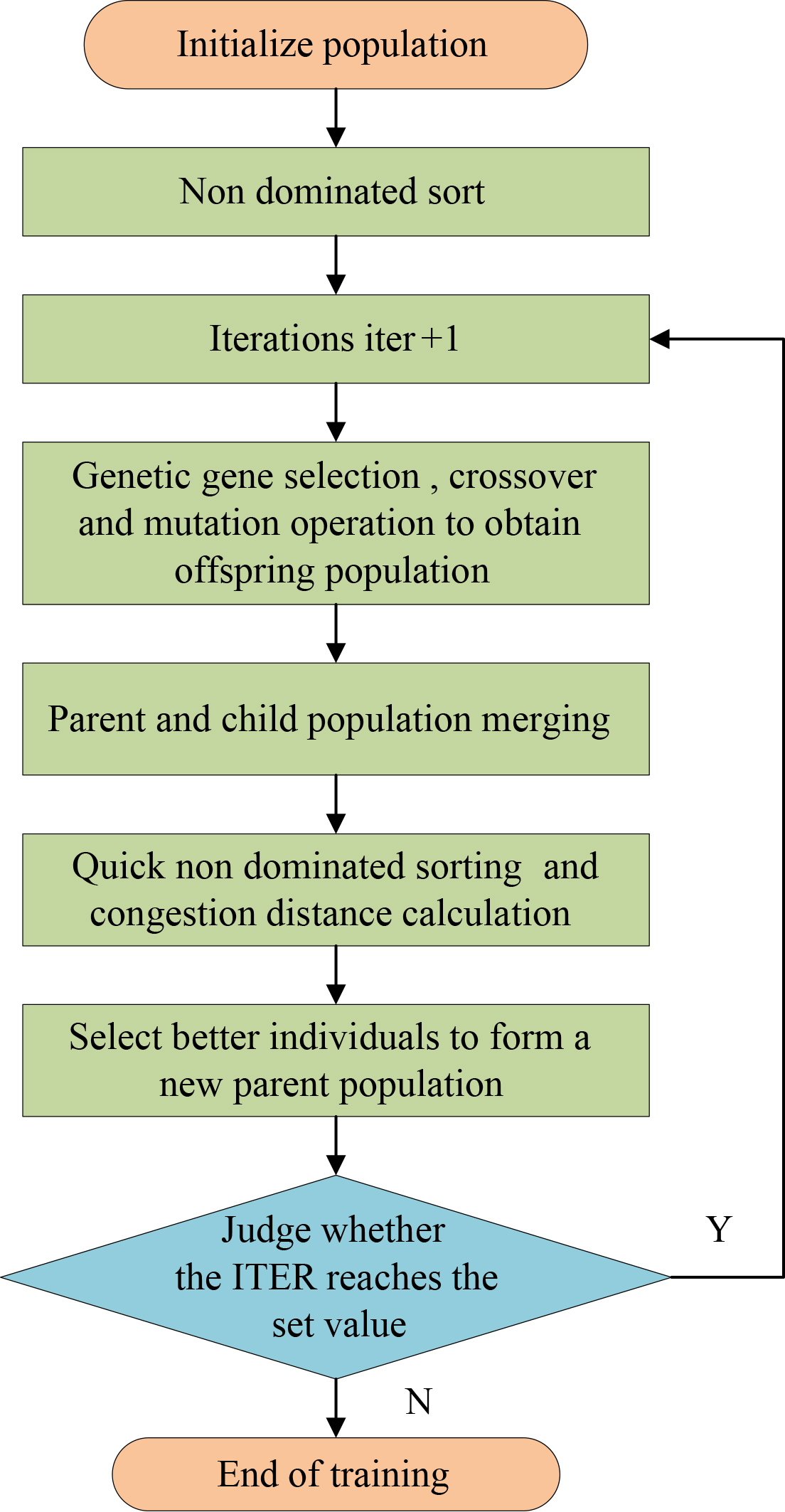
Now we use the designed improved multi-objective optimization algorithm to build a complete house environment planning system, which consists of three parts: house environment planning scheme generation, scheme performance evaluation, and multi-objective optimization algorithm, and the process of building the system is described in detail below [20]. Firstly, we need to input house environment parameters into the system, including environment level, sunlight intensity and change law, building spacing specification, etc., and then the system generates all environment design schemes that meet each restriction. Then the performance of each scheme with each dimensional objective is evaluated by the housing environment planning evaluation system. Finally, the better solution set of each dimensional objective is output by multi-objective optimization algorithm, and the operation flow of the system is shown in Fig. 3.
Intelligent house environment planning system computing process.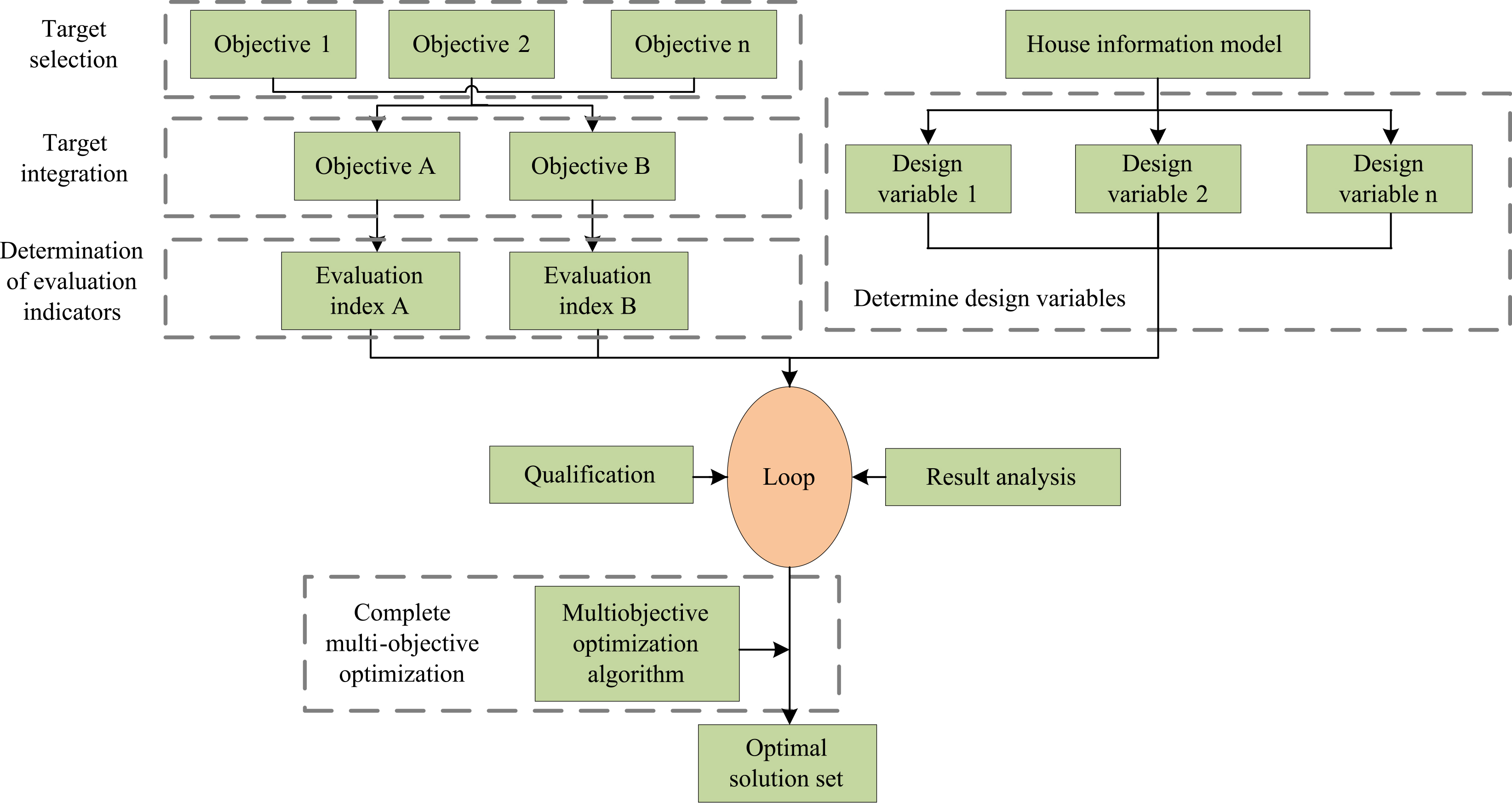
As shown in Fig. 3, the first step of the system needs to establish the housing environmental information model according to the input parameters, then calculate and determine the objectives of each required optimization, get the corresponding evaluation criteria, find the relationship between the variable parameters and the objective function see, and output a series of solutions through the multi-objective optimization algorithm. In the pre-environmental planning stage in the system, it is necessary to select the housing environmental planning factors that affect the output solutions according to the optimization-seeking objectives, and to reduce the system computation, only the factors with greater influence are listed as variable variables, and the factors with less influence are fixed and set to common values. Referring to the industry involved norms and practices, the results of the design variable selection are obtained as shown in Fig. 4.
Planning scheme design variable selection structure diagram.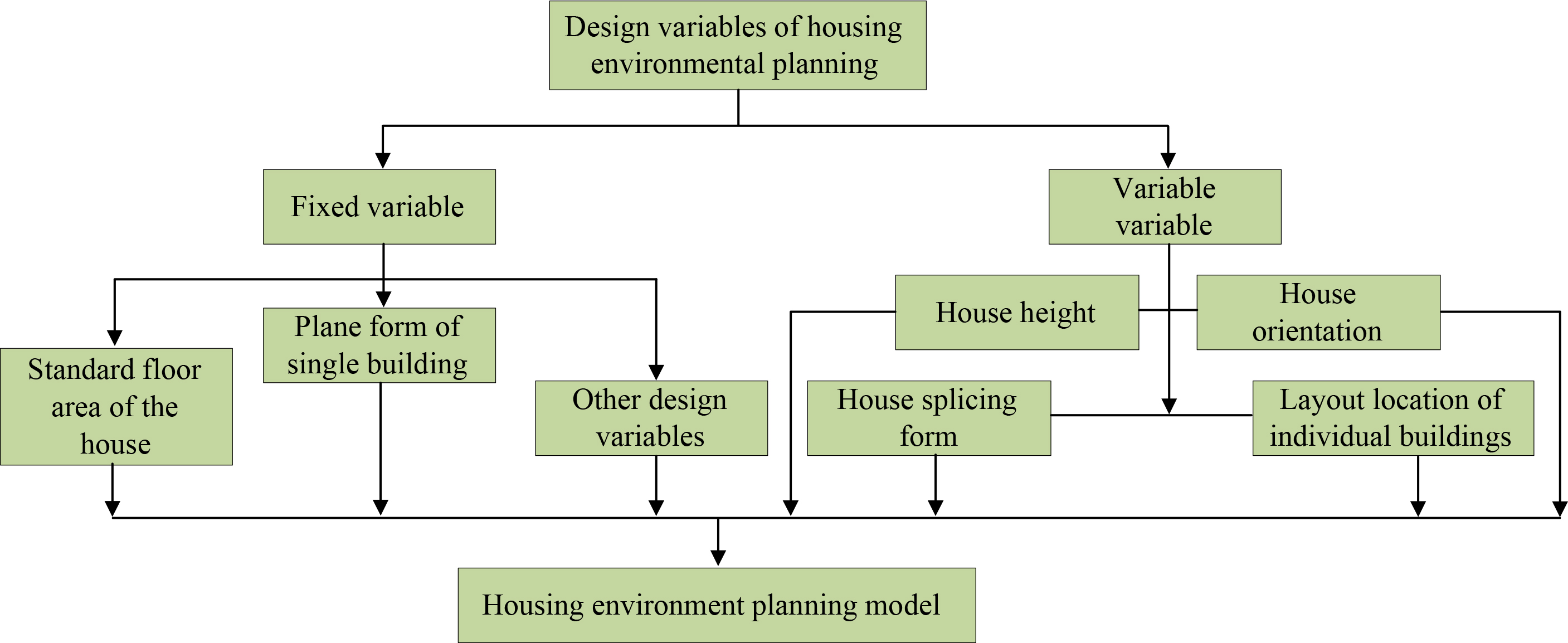
It can be seen from Fig. 4 that the variables to be considered in the optimal design of residential environment are divided into fixed variables and variable variables. The former includes the standard building area of the house, the plan form of single building, and other design variables. The latter mainly includes the height, orientation, splicing form, and layout position of the house, which together constitute the design scheme of residential environment. The type of variables in Fig. 4 can also be fine-tuned according to the needs of specific design projects. Before determining the final optimization objective function, it is necessary to classify the optimization objectives. In general, optimization objectives can be divided into rigid objectives that must be met and flexible objectives that can be selectively met, and these objectives can be further divided into sub objectives. See Table 1 for the indicator system.
Evaluation indicators of housing environment planning quality
Combined with the evaluation index system in Table 1, the classification process and results can be obtained, as shown in Fig. 5.
Process and results of stage optimization target categorization.
Then, referring to the evaluation standards of domestic and foreign housing environment planning, we can determine the performance evaluation primary indicators of the planning scheme are wind environment, thermal environment, light environment, sound environment and other environments, and the corresponding secondary indicators are wind speed and wind pressure, heat island intensity, shade area and shade rate, sunshine hours and lighting coefficient, indoor and outdoor noise level, volume ratio and green area rate. The following then design the mathematical model in the system, housing environment planning is essentially a dynamic multi-objective planning problem, its design variables are
In the Eq. (13), FAR is the plot ratio, and the larger the indicator, the greater the development benefit.
In Eq. (14), OSP is the open space potential of the house, which is the ratio of all the area in the area that can be converted into open space to the total area.
In Eq. (15), SSR is the house daylight satisfaction rate.
In Eq. (16), MRI,
Flow of housing environment optimization plan generation.
The progressive layout in Fig. 6 refers to the distribution of buildings in a certain order, and here the single houses are selected to be laid out in a sequential row. The specified screening is divided into two types, one is to incorporate the houses before screening the grid according to the grid attributes, and the other is to screen the layout rationality of the scheme. So far, the design of the housing environment planning system based on the improved multi-objective optimization algorithm is completed.
To test the practical application value and quality of recommended solutions of a housing environment planning system based on an improved multi-objective optimization algorithm. A simulation test was designed and carried out. By adjusting the parameters for many times, the adjustment range of the algorithm parameters is set according to the common application of genetic algorithm, and verified by the test method of expanding the parameter setting range, this set of parameter value range is reasonable. The finally determined algorithm parameter settings for simulation test are shown in Table 2.
Model parameter settings
Model parameter settings
The system logic is implemented in Python 3.0 programming language, the computer running memory is 8GB, CPU is i7-8700T, and the system is WIN10. Finally, the house environment in the simulation experiment is a square plan plot of
In Eq. (17),
Spatial distribution of Pareto optimal solution output by each planning system.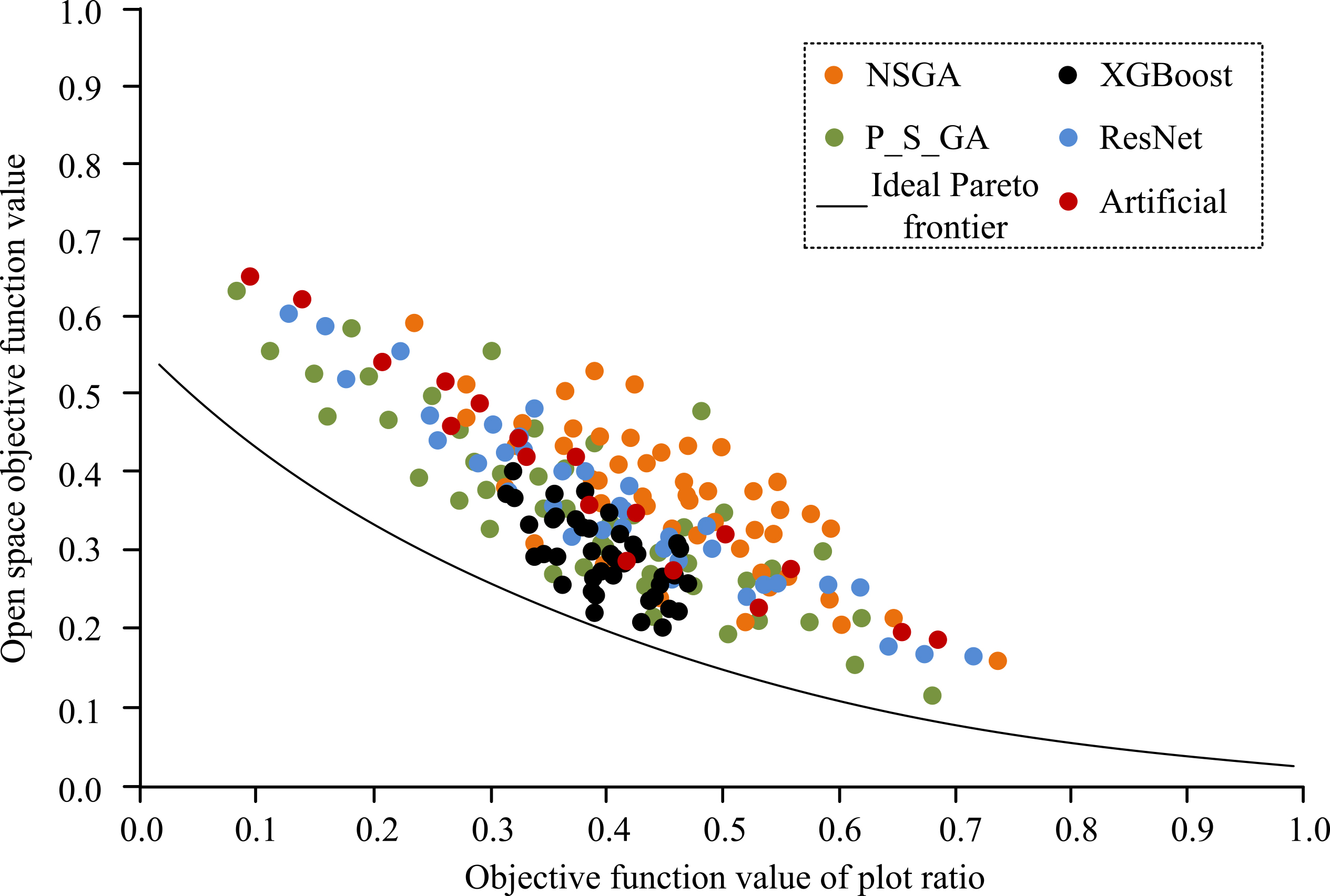
Comparison of convergence performance of various systems.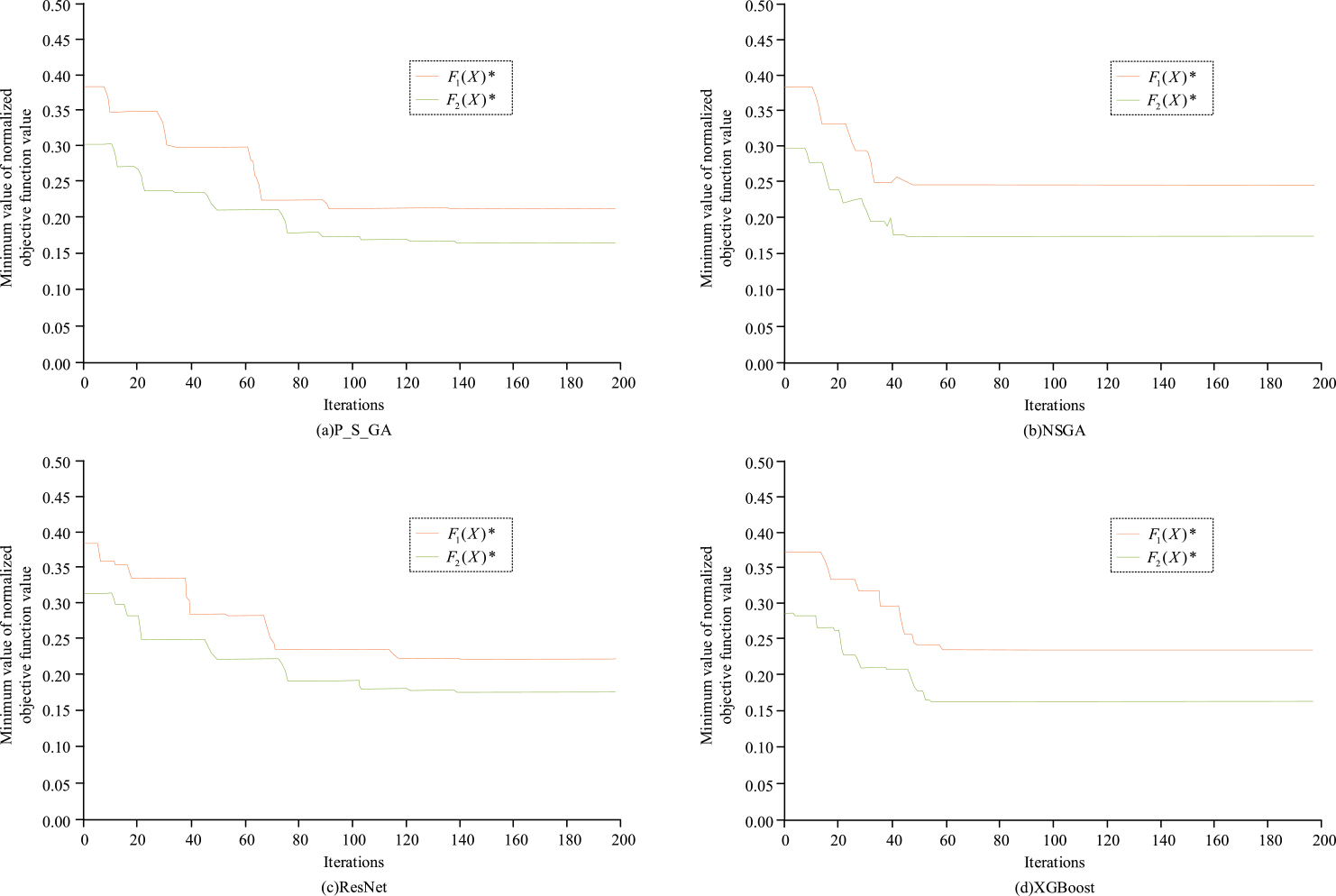
Different colors in Fig. 7 are used to represent different housing environment planning systems, “p_s_ga” represents the housing environment planning system based on the improved multi-objective optimization algorithm designed in this study, “NSGA” represents the housing environment planning system based on the NSGA algorithm, and “artistic” represents the scheme manually designed by the designer. The black solid line represents the ideal Pareto frontier. It can be seen from Fig. 7 that the xgboost system as a whole is closest to the ideal Pareto front, but like the “NSGA” system, the distribution is more concentrated, and premature convergence is more likely to occur. The optimal solution set of the “p_s_ga” system as a whole is closest to the ideal Pareto front, and the distribution is scattered. Moreover, the difference significance test p value of the optimal solution data is 0.007, which indicates that there is a significant difference in the data. The optimal solution sets of RESNET system and artificial design method are also distributed more dispersed, but are farther from the ideal Pareto frontier than the “p_s_ga” system. It shows that the optimal solution output by the “p_s_ga” system performs better on the core targets
The subgraphs (a), (b), (c) and (d) in Fig. 8 are, respectively used to show the P_ S_ The change curve of
Comparison of the number of Pareto optimal solutions of each system.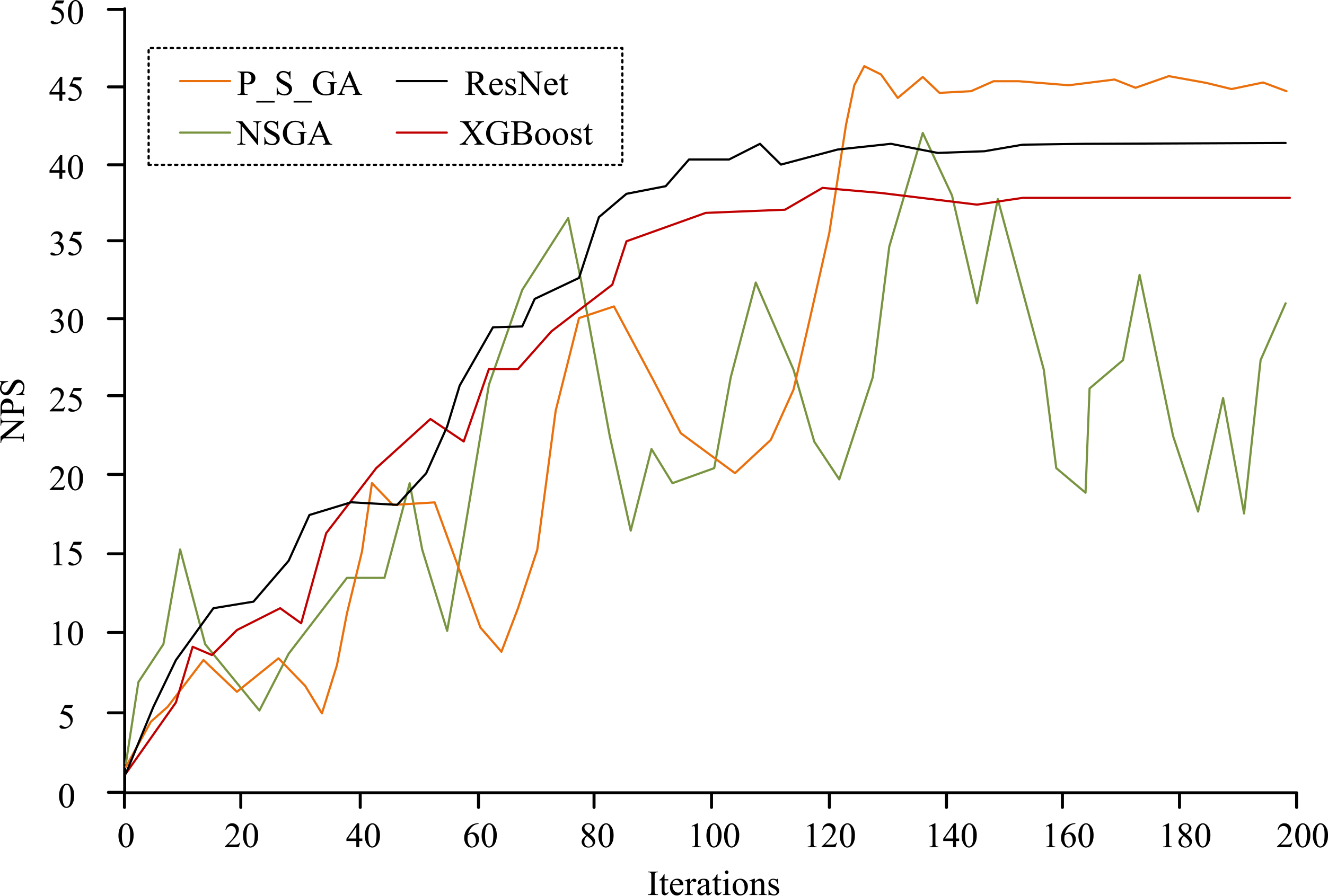
In Fig. 9, the horizontal axis represents the iterative training times of the system, and the comparison is based on 200 times. The vertical axis represents the number of Pareto optimal solutions output by the system under the premise of each iteration number. Different data line colors still represent different system types. It can be seen from Fig. 9 that with the increase of iteration times, the number of Pareto optimal solutions output by the intelligent planning system for housing environment constructed based on NSGA algorithm fluctuates repeatedly and greatly, and does not tend to be stable. However, with the increase of the number of iterations_ S_ The number of Pareto optimal solutions output by the intelligent planning system for housing environment based on GA algorithm, RESNET algorithm and xgboost algorithm generally increases first and then tends to be stable. When the number of iterations is less than 140, the number of Pareto optimal solutions output by the system also fluctuates greatly, but when the number of iterations is more than 140, the number of Pareto optimal solutions output by the system fluctuates significantly. When the number of iterations reaches 200, The output Pareto optimal solutions of the three systems are 44, 41 and 38, respectively. Then analyze the quality of Pareto optimal solution output by each system. See Fig. 10 for the statistical results.
Quality comparison of Pareto optimal solution output by each system.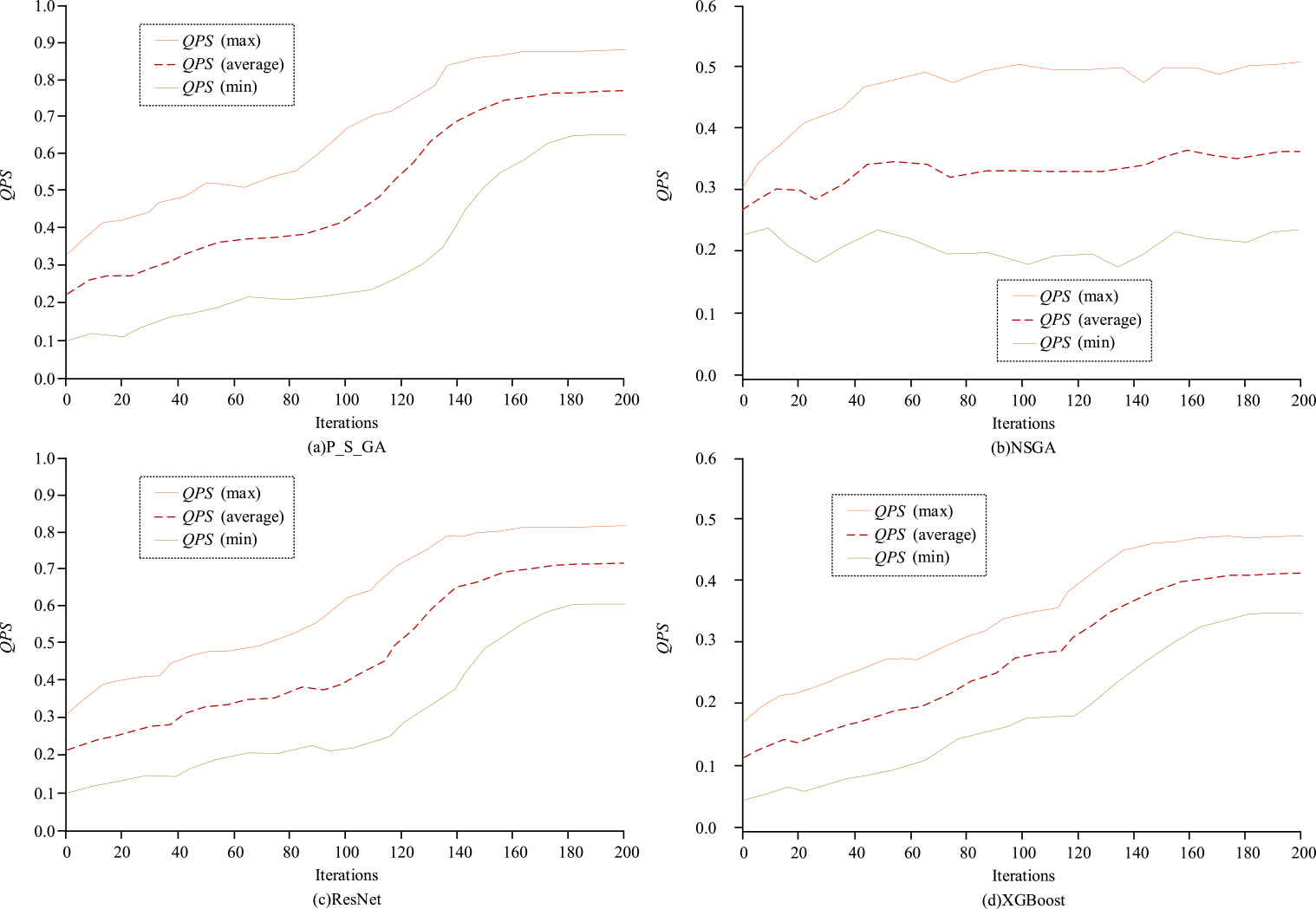
The vertical axis in Fig. 10 represents the quality of the Pareto optimal solution output by the system, and the evaluation index is QPS. The colors of different data lines represent different QPS statistical dimensions, and the subgraphs (a), (b), (c) and (d), respectively represent the values based on P_S_GA algorithm, NSGA algorithm, RESNET algorithm, and xgboost algorithm to build Pareto optimal solution quality statistical results of housing environment planning system. It can be seen from Fig. 10 that as the number of training iterations of the system increases_ S_ The maximum value, average value and minimum value of Pareto optimal solution quality index QPS of the system of GA algorithm, RESNET algorithm and xgboost algorithm all show a trend of first increasing and then stabilizing. When iteration
Statistics of main performance indicators of each system under various initial parameters
Pay attention to the worst case, normal case, and optimal case of parameter initialization based on the algorithm in Table 3. The reference industry characteristics correspond to the worst 20% of the manual design cases, the middle 60% of the quality, and the best 20% of the quality schemes. Observing Table 2, it can be seen that in the normal and optimal cases, the quality of the output scheme of the planning method constructed based on the P_S_GA algorithm and the manual planning method is roughly the same, and is significantly better than other common comparison methods, such as the normal case and the optimal case., the average QPS of the optimal solution for the planning method constructed based on the P_S_GA algorithm and the manual planning method are 0.78, 0.80 and 0.91, 0.92, respectively. However, in the worst case, the quality of the output solution of the artificial design scheme is significantly lower than that of the planning method based on the P_S_GA algorithm. For example, in the worst case, the QPS averages of the two optimal solutions are 0.61 and 0.35, respectively. The proposed residential environmental planning method is not much different from the manual planning results in the quality of the output scheme, but the output solution stability in extreme cases is higher than that of the manual design scheme.
In order to further verify the application value of the housing environment optimization design method based on the improved genetic algorithm proposed in this study, a domestic project under civil housing planning and construction is selected as an example, and the housing environment is designed using this method and manual method, respectively. For reasons of confidentiality, the specific information of the selected project cannot be disclosed. The case test results show that it takes 14.7 seconds for the method designed in this study to output the optimal design scheme set, and it takes 14.3 hours for the manual method to design. Moreover, after the evaluation of experts in the industry, the design schemes obtained by the two methods meet the requirements of various environmental design evaluation indicators.
At present, the main living environment requirements of domestic and foreign residents for civil residences are concentrated in the following points. First, the proportion of non-residential land should be as small as possible to ensure that residents have enough space for outdoor activities. The second point is the extent to which non-residential land can be built into public open space. If there is enough non-residential land around the house, but very little of it can be developed into public open space, these spaces will not be able to provide more suitable spaces for residents. home value. The third point is the sunshine conditions, specifically, how much external surface area of the house can be covered by sunshine, and whether the heat supply of sunshine can meet the living and living needs of residents. The four objective functions of the housing environment optimization model proposed in this study are designed based on the above-mentioned residents’ needs.
Judging from the status quo of residential environmental planning, most domestic residential environmental planning and design are formed by artificial design, which is highly dependent on the designer’s personal experience, aesthetic style and other subjective factors, resulting in the quality of residential environmental planning largely determined by Due to the designer’s personal ability, if the designer’s ability is insufficient, he has no experience in environmental planning and design of a certain type of house, or deliberately adjusts the design method, it may lead to the situation that the environmental planning quality of the house cannot satisfy most residents. Therefore, carrying out this research and designing a housing environment planning system based on intelligent multi-objective optimization algorithm that can take into account various factors has certain application potential.
The analysis results of this research show that the planned output of the planning system based on the improved genetic algorithm is the ideal Pareto frontier average distance of the optimal solution,
Conclusion
In order to improve the efficiency and rationality of housing environment planning, this research attempts to construct an improved multi-objective optimization algorithm by integrating the Pareto solution set and segmented prediction ideas into the genetic algorithm, and based on this, a multi-objective intelligent housing environment optimization multi-objective design is designed. Intelligent algorithm system. The simulation results show that the system designed in this study is closer to the ideal Pareto frontier as a whole than the system constructed based on the NSGA algorithm, with better convergence and no convergence rebound phenomenon. When iteration