
Abstract
Drivers are held responsible for the vast majority of traffic accidents. While most of the errors that cause these accidents are involuntary, a significant number of them are caused by irresponsible driving behaviors, which must be utterly preventable. Irresponsible driving, in addition, is often associated with the stress drivers experience while driving. We have previously implemented an intelligent system based on fuzzy logic for determining driver’s stress in Vehicular Ad hoc Networks (VANETs), called Fuzzy-based System for Determining the Stress Feeling Level (FSDSFL), considering the driver’s impatience, the behavior of other drivers, and the traffic condition as input parameters. In this work, we present an Improved FSDSFL (IFSDSFL) system, which considers the driving experience and history as an additional input. We show through simulations the effect that driving experience and history and the other parameters have on the determination of the stress feeling level and demonstrate some actions that can be performed when the stress exceeds certain levels.
Keywords
Introduction
The highly competitive and rapidly advancing autonomous vehicle race has been on for several years now, and it is a matter of time until we have these vehicles on the roads. However, even if the automotive companies do all it takes to create fully automated cars, there will still be one big obstacle, the infrastructure. In addition, this could take decades, even in the most developed countries. Moreover, 93% of the world’s fatalities on the roads occur in low- and middle-income countries [38] and considering all these facts, Driver Assistance Systems (DASs) and Vehicular Ad hoc Networks (VANETs) should remain in focus for the foreseeable future.
DASs are intelligent systems that are implemented in vehicles to increase driving safety by assisting drivers and can be very helpful in a variety of situations as they do not depend on the infrastructure as much as driverless vehicles do [12]. Furthermore, DASs can provide driving support with very little cost, thus help the low- and middle-income countries in the long battle against car accidents.
VANETs, on the other hand, aim not only at saving lives but also improving traffic mobility, increasing efficiency, and promoting travel convenience of drivers and passengers [20,24,33]. In VANETs, network nodes (vehicles) are equipped with networking functions to exchange essential information with each other via vehicle-to-vehicle (V2V) and with roadside units (RSUs) through vehicle-to-infrastructure (V2I) communications.
By leveraging the data acquired by other vehicles and infrastructure, DASs can make better decisions and offer more services, which provides drivers with enhanced applications and experience. These data range from simple information such as traffic and road condition messages to a complete perception of the surrounding environment obtained through cameras, thus improving road safety significantly.
Nevertheless, there are other determinants that affect the driving operation, such as the drivers and their behaviors. In fact, according to some traffic safety facts provided by a survey of the U.S. Department of Transportation [36], the drivers are the immediate reason for more than 94% of the investigated car crashes. The driver-related reasons are broadly categorized into recognition errors (e.g., inattentive driving, distracted driving, and inadequate surveillance), decision errors (i.e., misjudgment of the driving situations), performance errors (overcompensation, poor directional control, etc.) and non-performance errors (fatigue, sleep, etc.) [10,13,31,36]. While most of the errors committed by drivers are considered involuntary, other errors often come as a result of their irresponsible behavior, and this must be utterly preventable. These errors are, in most cases, associated with the stress that drivers feel when they are driving. Determining the factors that cause the stress is consequently a need that requires careful and immediate work.
In [4], we have proposed an intelligent system based on Fuzzy Logic (FL) that determines the driver’s stress in real-time. The proposed system, called Fuzzy-based System for Determining Stress Feeling Level (FSDSFL), determines the output based on factors such as the driver’s impatience, the behavior of other drivers, and the traffic condition. In this work, we present an improved version of our system, called Improved FSDSFL (IFSDSFL), that additionally considers the driving experience and history as an input parameter. A concept of the proposed system is given in Fig. 1. We evaluate the proposed system by computer simulations and see the effect that driving experience and history and other parameters have on the determination of the stress feeling level.
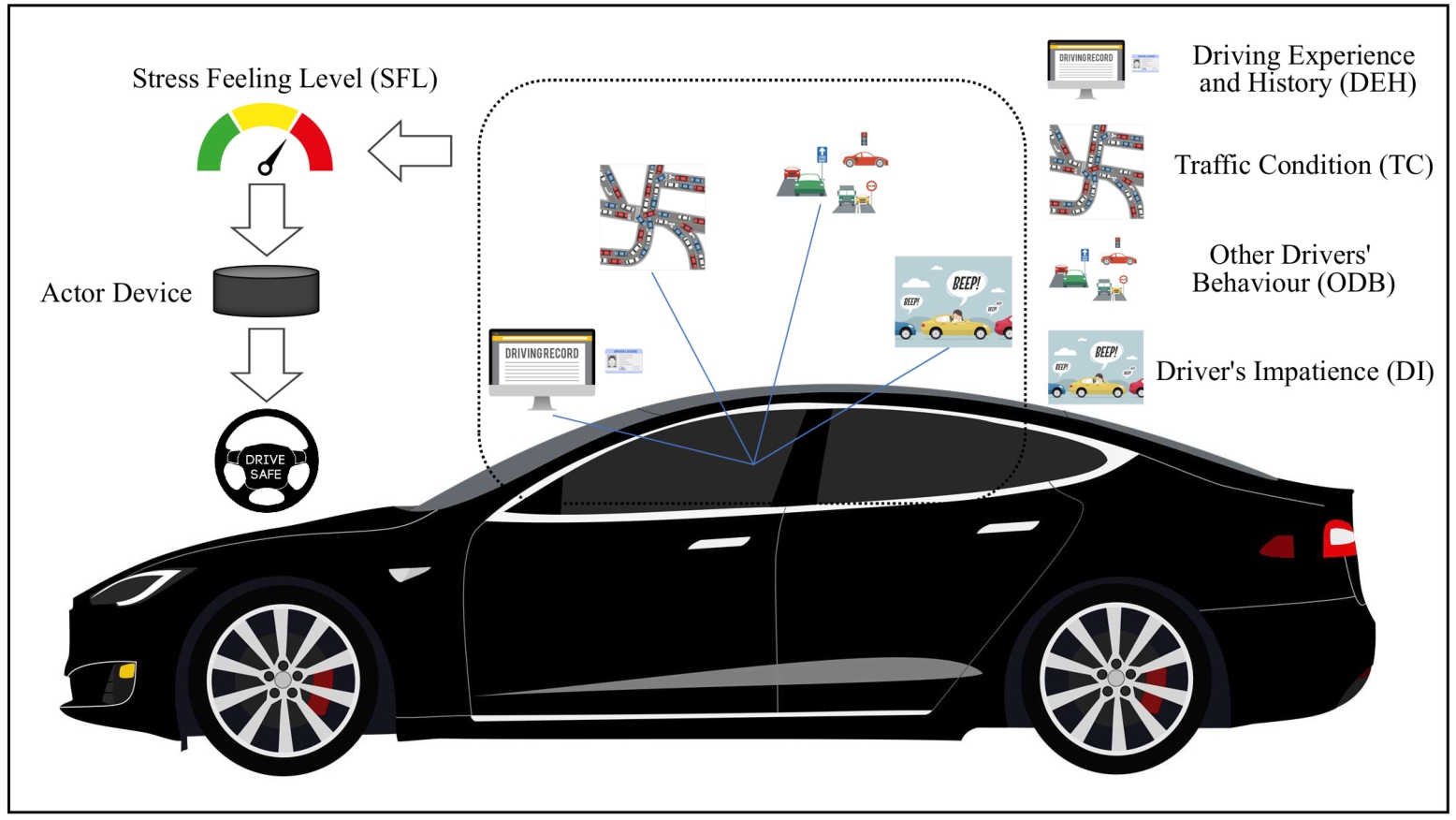
Concept of IFSDSFL.
The structure of the paper is as follows. Section 2 provides a background overview of IoT and WSNs in addition to VANETs. Section 3 describes the proposed fuzzy-based simulation system and its implementation. Section 4 discusses the simulation results. Finally, conclusions and future work are given in Section 5.
In this section, we present a brief introduction of the IoT, WSNs, and VANETs since these concepts and technologies complement the functioning of each other. We also give a short description of previous works that are related to this work.
Internet of things
In general, the IoT is a networking concept that refers to the rapidly growing number of devices able to communicate and interact with others over different types of networks with the aim of creating a smart environment which will add more ease to daily life for the people worldwide. Although there are many components involved in IoT, ITSs and therefore VANETs are an essential part when it comes to the development of one of the most important IoT applications – Smart Cities. ITSs include intelligent systems which help to better manage traffic, cut pollution, make better use of infrastructure and help citizens stay safe and clean. However, most ITSs rely on expensive infrastructure, and alternatives which reduce the required investment are to be sought-after [25].
Wireless sensor networks
Sensors offer significant help in various social problems by converting real-world events into digital data that can be processed, analyzed, stored, and acted upon. A WSN consists of a large number of sensor nodes that operate together to monitor a particular process [11,37]. WSNs have become more mature over the years and will continue to give momentum to many applications for the features they provide. As one of the technologies that take part in ITS, WSNs are seen as key components of heterogeneous systems cooperating along with other technologies employed in vehicular scenarios, especially due to the low installation and maintenance costs [23]. They can be deployed along urban roads and highways, intersections and in parking areas to constantly obtain information about the weather and road condition, the traffic state, and so on.
Vehicular ad hoc networks
In terms of networking, VANETs can be defined as networks of vehicles spontaneously created, able to connect vehicles with other vehicles in the network and with the infrastructure via V2V and V2I communication links. The vehicles behave as sensor and actor nodes and relay messages via one-hop or multi-hop communications. The infrastructure includes Road Side Units (RSUs), road signs, Electronic Toll Collection (ETC), and so on. For example, RSUs are deployed along the roads and are used to increase robustness, connectivity, and coverage by acting as static sensors and relay nodes [14]. A typical VANET is illustrated in Fig. 2.

Illustration of a typical Vehicular Ad hoc Network showing the two types of communications (V2V and V2I) and various applications (ETC, traffic management, and the broadcast of safety messages).
As a key component of Intelligent Transportation Systems (ITSs), VANETs have huge potential to enable applications ranging from road safety, traffic optimization, infotainment, commercial to rural and disaster scenario connectivity [22]. Among these, road safety and traffic optimization are considered the most important ones as they have the goal to reduce drastically the high number of accidents, guarantee road safety, make traffic management, and create new forms of inter-vehicle communications in ITSs. The ITSs manage the vehicle traffic, support drivers with safety and other information, and enable applications such as automated toll collection and DASs [15].
Despite the attractive features, VANETs are characterized by very large and dynamic topologies, variable capacity wireless links, bandwidth and hard delay constraints, and by short contact durations which are caused by the high mobility, high speed, and low density of vehicles. In addition, limited transmission ranges, physical obstacles, and interferences make these networks characterized by intermittent connectivity [17,30].
Therefore, it is necessary to design proper systems, network architectures and applications that can overcome the problems that arise from vehicular environments.
Our research work focuses on developing an intelligent non-complex driving support system that determines the driving risk level in real-time by considering different types of parameters. In previous works, we have considered different parameters, including in-car environment parameters such as the ambient temperature and noise, and driver’s vital signs, i.e., heart and respiratory rate, for which we implemented a testbed and conducted experiments in a real scenario [6]. The considered parameters include environmental factors and driver’s health condition, as these parameters affect the driver’s capability and driving performance. In [3], we presented an integrated fuzzy-based system, which in addition to those parameters, considers the following inputs: vehicle speed, weather and road condition, driver’s body temperature, and vehicle interior relative humidity. The inputs were categorized based on the way they affect the driving operation. In another work [5], we proposed a system that decides the driver’s impatience since impatient drivers are often an immediate cause of many road accidents.
In a more recent paper [4], we have proposed an intelligent system that determines the driver’s stress. The proposed system, called FSDSFL, determines the driver’s stress based on factors such as the driver’s impatience, the behavior of other drivers, and the traffic condition. We implemented the system in FuzzyC, a Fuzzy Logic System (FLS) simulation tool developed in our laboratory, and simulated the proposed system for light, moderate, and heavy traffic conditions. We considered different driver behaviors and saw how they affect the stress of both patient and impatient drivers. Since the system we propose in this paper is an improved version of FSDSFL, with the driving experience and history of the driver as an additional input, we show later in the paper the results of both systems and draw a comparison between them.
Proposed fuzzy-based system
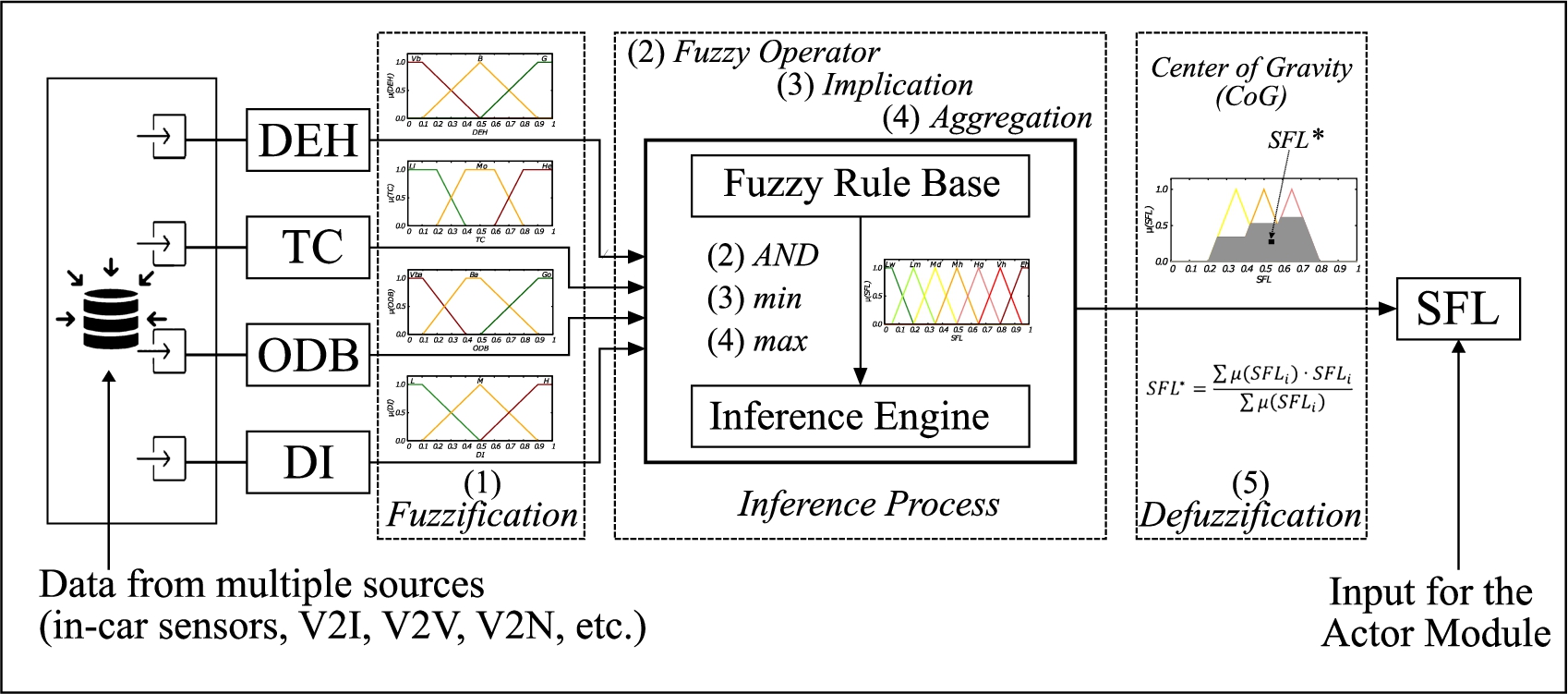
Diagram showing the flow of information between the components of IFSSFL. The steps of the fuzzy inference process and the methods used are shown within the dashed lines.
The proposed system, called Improved Fuzzy-based System for Determining Stress Feeling Level (IFSDSFL), is shown in Fig. 3. We use FL to implement IFSDSFL as it can make a real-time decision based on the uncertainty and vagueness of the provided information [19,21,29]. In addition, we use Type 1 fuzzy sets because Type 1 FLSs are faster, have lower computational costs, and are adequate for our application.
On the other hand, we choose Mamdani over Sugeno because Mamdani systems have more widespread acceptance for decision support applications due to the intuitive and interpretable nature of the Fuzzy Rule Base (FRB) [7]. Moreover, determining the parameters of polynomials in the antecedent of Sugeno fuzzy rules is inefficient and less straightforward than defining the output fuzzy sets for Mamdani inference [28,39,41].
As shown in Fig. 3, the methods selected along the inference process are: AND operation (min method) as the Fuzzy Operator, min method for the Implication step, max as the Aggregation method, and Center of Gravity (CoG) for the defuzzification process. These methods are the most used methods in literature due to the simplicity, efficacy, and performance they offer.
The interpretation of the parameters is as follows.
Driving Experience and History (DEH): Research has shown that factors such as age or accident history, although not always directly [8,9], are associated with driving [26,34]. For example, drivers who have been involved in a traffic accident are more likely to feel anxiety and develop post-traumatic stress disorders that can last up to a year [27,32]. In addition, younger drivers have reported much more stress than experienced drivers [40].
Traffic Condition (TC): The traffic condition is a direct cause for stress. No one wants to waste time on the road and traffic jams create the feelings of no escape. Different studies have been focused to identifying the effects of traffic conditions on driving stress. The results have showed that stress levels were highest for drivers experiencing congested roadways [1,2,16,18,35].
Other Drivers’ Behavior (ODB): Even the most experienced drivers may feel stress when they fall victims of road rage, or even by just being surrounded drivers showing other irresponsible behavior such as drunk and distracted driving. Most drivers feel relaxed when others show good driving etiquette but experience elevated stress once they share the road with drivers who violate traffic signals. For example, many might feel momentary stress when the drivers ahead make a turn or change lanes without signaling or when the irresponsible behavior of others leads to an involvement in a near miss.
Driver’s Impatience (DI): The impatience is considered an indicator of stress. Impatient drivers gradually make small mistakes that can escalate to bigger ones, which often lead to serious accidents. In [5], we have proposed an approach that determines driver’s impatience by considering the driver’s emotional condition, the time pressure and the number of route stops.
Stress Feeling Level (SFL): This parameter is the output of our system. It includes seven stress levels ranging from low to extremely high. While the output values are numbers from 0 to 1, the linguistic description of stress levels is also useful for the interpretation of the results, which on the other hand, allows for better implementation of an actor module. Based on the stress level, an actor module can perform actions that can improve the driver’s stress for the safety of all road users.
The set of linguistic values (term set) of each linguistic variable (parameter) is defined respectively as:
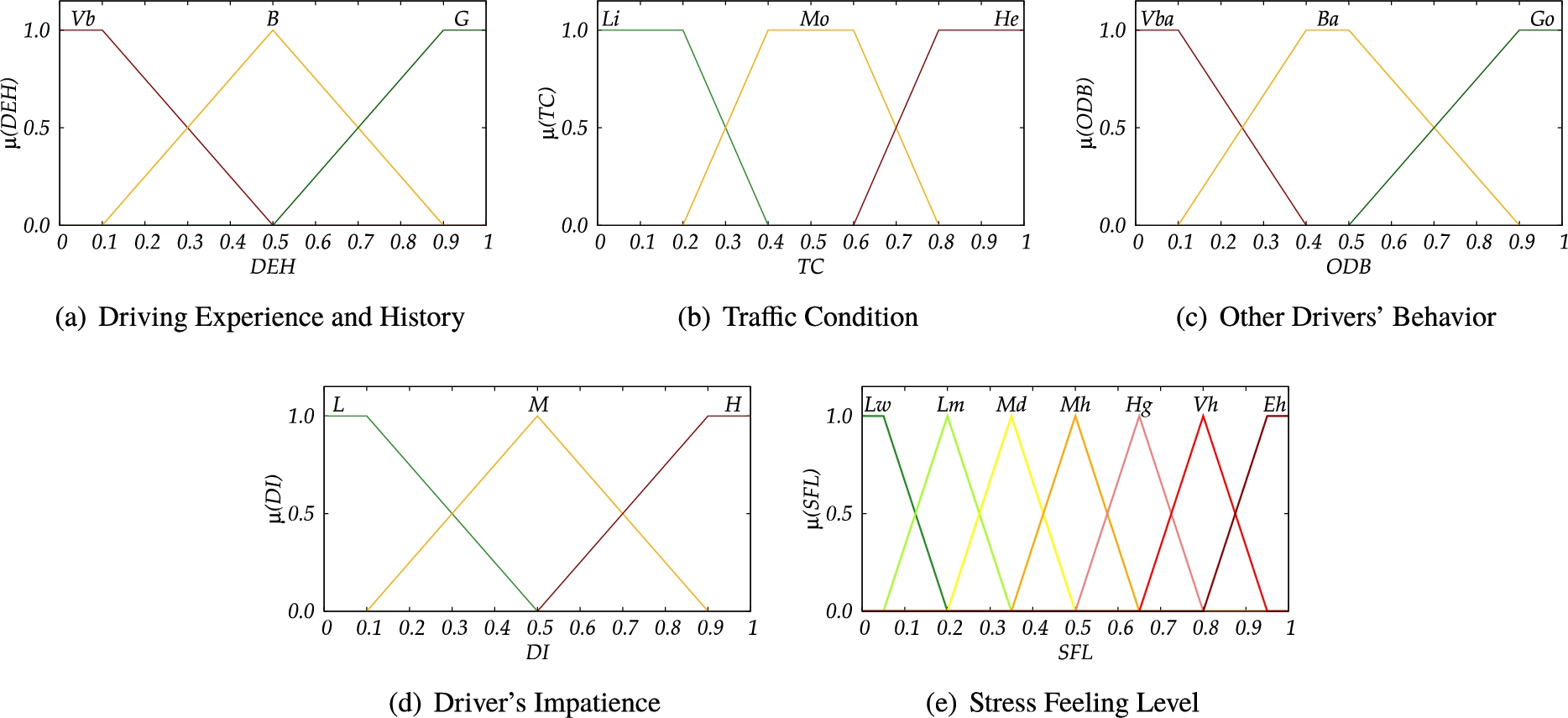
Membership functions of input and output parameters. The label above a membership function is the abbreviation of the respective linguistic value which it represents.
Each term of a term set is in essence a fuzzy set and is represented by a membership function. The membership functions used for all parameters are given in Fig. 4. We use three terms for each input parameter and seven for the output as to maintain input-output continuity, which is an important feature that recommends that small changes in the input parameters should result in small changes of output values. We use triangular and trapezoidal membership functions because these types of functions have lower computational costs and are more suitable for real-time operation. The numeric range of each membership function is decided based on the nature of each parameter and then adjusted during the design process which included many computer simulations.
The linguistic description of input and output parameters concerns the FRB, too. In principle, the FRB forms a fuzzy set of dimensions
Fuzzy rule base of IFSDSFL
In this section, we present the simulation results for our proposed system. We use FuzzyC as a simulation tool for the design and simulation of IFSDSFL. FuzzyC is software written in C language with an accuracy and ease in implementation similar to the MATLAB Fuzzy Logic Toolbox but with higher computational efficiency. All the aspects of the simulation environment are summarized in Table 2.
Testing environment
Testing environment
We also present the simulation results of the model of the system we have presented in [4]. The results of the IFSDSFL are presented in Fig. 5, Fig. 6, and Fig. 7, whereas the results of the previous model of system are given in Fig. 8. In the simulations of the improved system, we consider DEH and TC as constant parameters. We show the relation between SFL and DI for different ODB values.
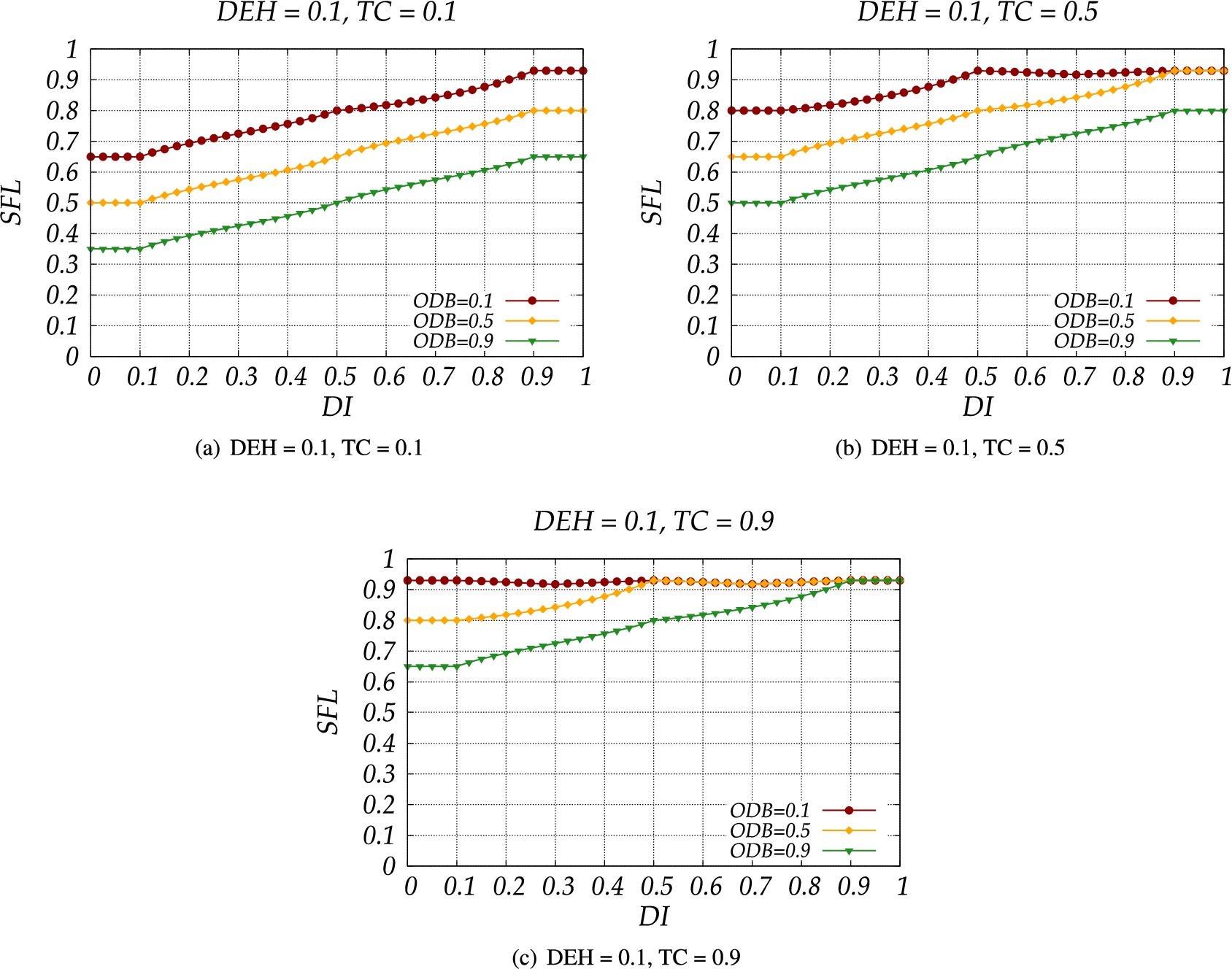
Simulation results of IFSDSFL for DEH = 0.1.
In Fig. 5, we show the results for DEH = 0.1 and change TC from 0.1 to 0.9. We can see that when there is no traffic congestion, the drivers experience severe stress only when they shows high levels of impatience and when the behavior of other drivers is very bad. When they seem to show patience, and the behavior of other drivers is good, the stress is determined as moderate. However, when traffic is heavy, we can see that the drivers experience much more stress, with most scenarios involving very high stress levels. This can be attributed to the fact that they are still inexperienced and yet with a history of accidents.
The impact of better driving experience and history can be seen in Fig. 6 and Fig. 7. Figure 6 shows the results for experienced drivers who have been involved in accidents in the past and inexperienced drivers, but with no bad records. They experience less stress but still in considerable values, with stress values above the moderate level accounting for most driving scenarios.
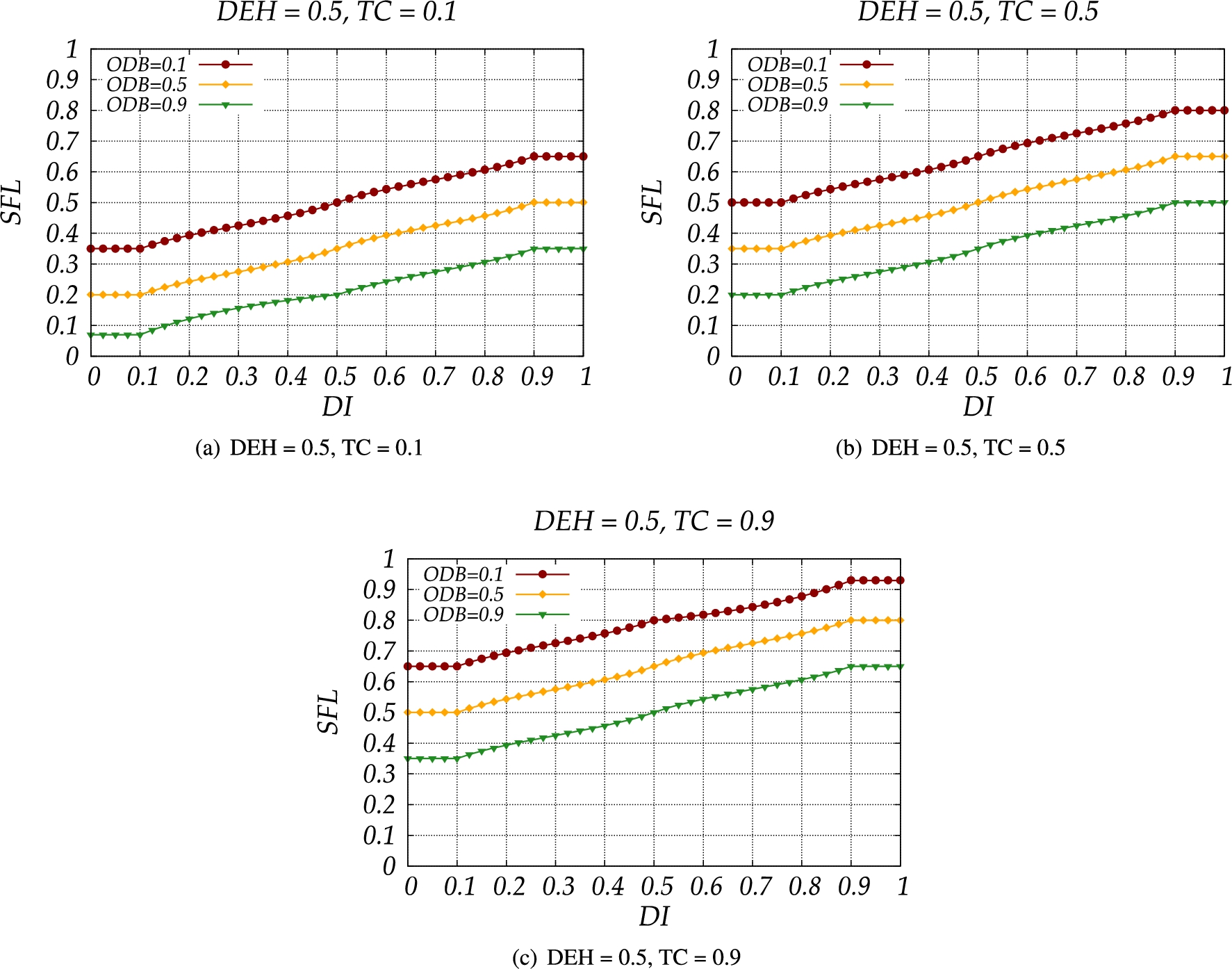
Simulation results of IFSDSFL for DEH = 0.5.
In the case of experienced drivers with no bad records (see Fig. 7), we can see that the drivers experience high stress only when they show high degrees of impatience while other drivers are violating traffic rules. All other scenarios indicate that the drivers are not experiencing stress that can cause a potential accident.
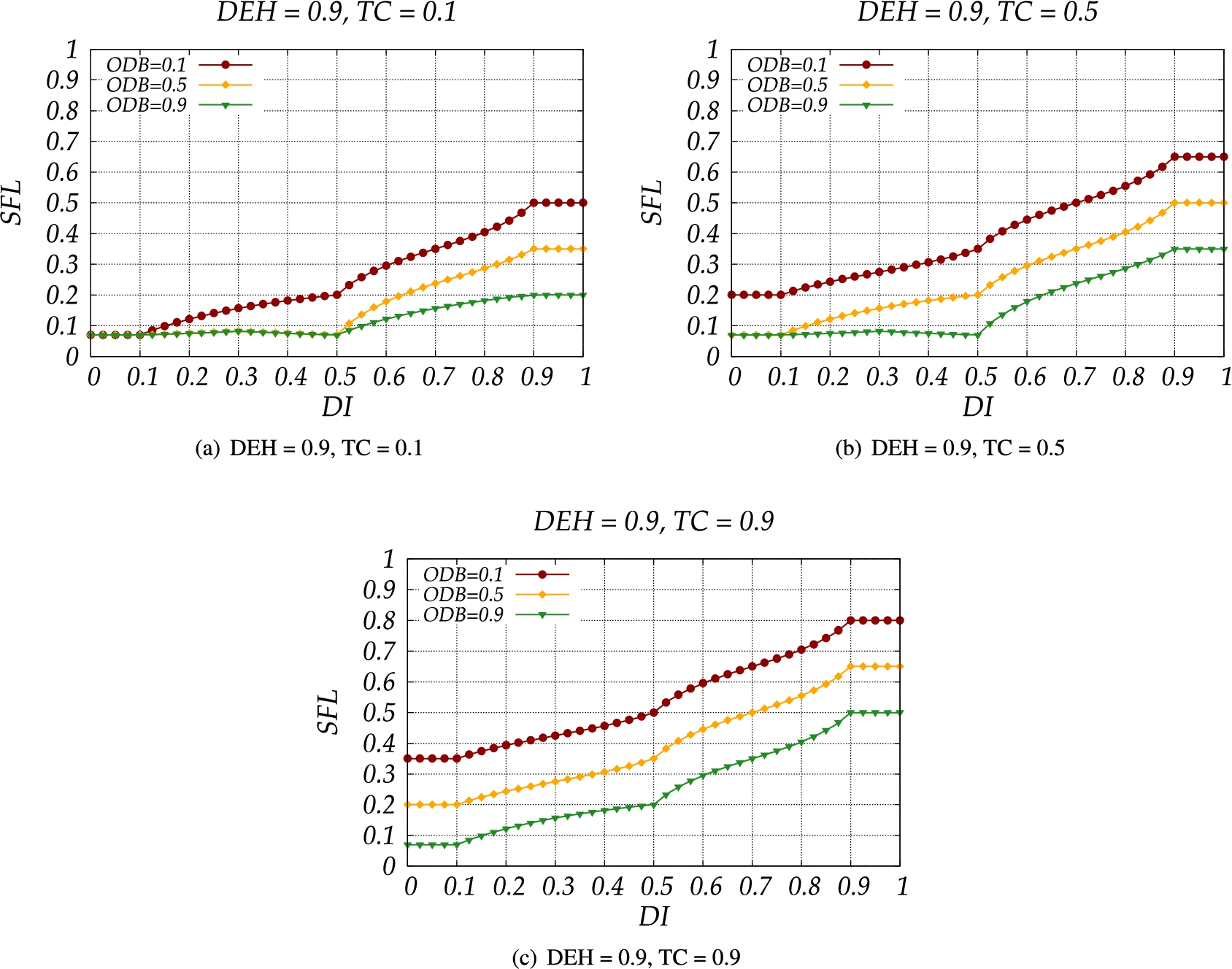
Simulation results of IFSDSFL for DEH = 0.9.
When DEH is not taken into consideration (see Fig. 8), we can see that changes in TC, ODB and DI have stronger effects on SFL. For example, the stress feeling level is determined as moderate and below for most light traffic scenarios, however it increases significantly when traffic becomes heavier. In addition, a variation in ODB is in most cases associated with a 20% difference in SFL. The improved system, on the other hand, brings this difference to 15% and the effect of traffic condition on SFL is more realistic since it considers the driving experience and history of drivers.
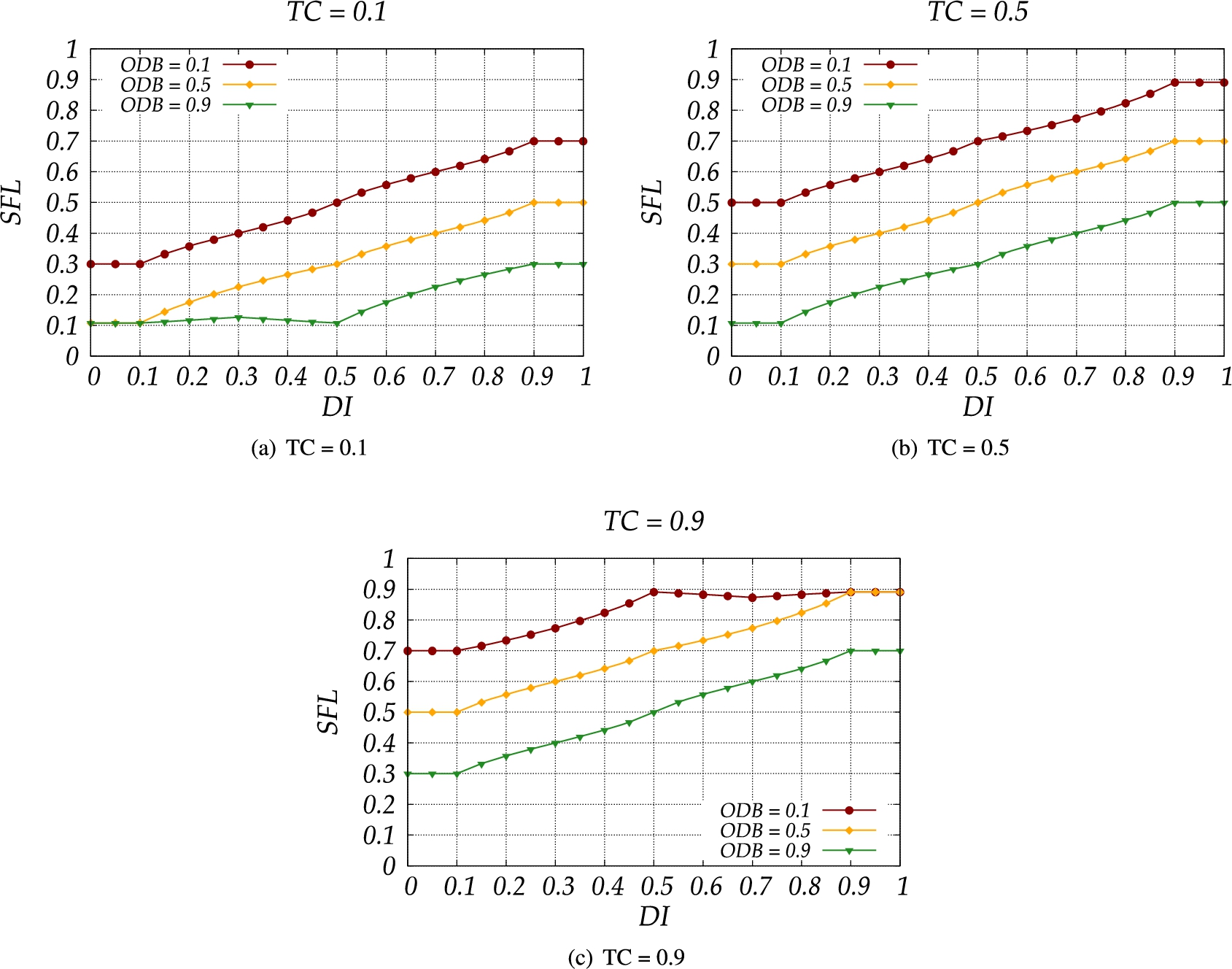
simulation results of FSDSFL.
In the cases when the driver is considered to be under too much stress, the system can take several actions that can improve the driving situations and therefore reduce the risks of accidents. For example, the system can suggest the use of an alternative route that has less congestion, or it can adjust the interior environment of the car to help the driver manage the driving situations patiently.
In this work, we presented the implementation of an FL approach that determines the driver’s stress feeling level by considering the driver’s impatience, the driving experience and history, the behavior of other drivers, and the traffic condition. We showed through simulations the effect of the considered parameters on the determination of the stress feeling level. The simulations show that when the traffic is heavier than usual, drivers tend to show an increased level of stress, especially if they are still inexperienced or have bad driving records. The experienced stress is even higher when other drivers violate the traffic rules. However, when the experienced drivers have no bad driving records and are driving with much patience, they can manage to drive smoothly in almost every driving situation. The results are also compared with the previous system. The improved system determines SFL more effectively because the traffic condition, the behavior of other drivers, and the driver’s impatience have different effects on SFL when the driving experience and history is taken into consideration.
In the future, we would like to make extensive simulations and experiments to evaluate the proposed system and compare the performance with other systems.
Conflict of interest
The authors have no conflict of interest to report.