
Abstract
The quadratic assignment problem (QAP) is one of the most studied combinatorial optimization problems with various practical applications. In This paper, we present an Elite Opposition-Flower Pollination Algorithm (EOFPA) for solving Quadratic Assignment Problems. The performance of the proposed algorithm is tested against a set of benchmarks of QAP from the public QAPLIB Library. we compare the algorithm against the best proposals from the related literatures and we determine that the proposed algorithm is superior to some other algorithms.
Keywords
Introduction
The quadratic assignment problem (QAP) in location Theory is one of the models used for the multi-row layout problem with facilities of equal area and is known for its diverse applications. QAP was introduced by Koopmans and Beckman in 1957 [1] who were trying to model a facilities location problem. The objective of the problem is to assign a set of facilities to a set of locations in such a way to minimize the total assignment cost. The assignment cost for a pair of facilities is a function of the flow between the facilities and the distance between the locations of the facilities. It is possible to formulate some classic problems of combinatorial optimization, such as the traveling salesman, maximum clique and graph partitioning problems, as a QAP. The QAP belongs to the class of NP-complete problems and is considered as one of the most difficult combinatorial optimization problems. Exact solution strategies for the QAP have been unsuccessful for large problem (approximately N ≥ 25).
The mathematical formulation of the problem as follows [2]:
x ij = 1 means facility i being placed in location j
According to the computational complexity theory, there are no exact algorithms to solve NP-hard problems in polynomial time unless P = NP. Applications of the QAP in real life have been used to solve problems like: backboard Wiring [3], scheduling, process [4], design typewriter keyboard [5], hospital planning [6] other ergonomic designs, scheduling parallel production lines, forest parks [7], numerical analysis [8], turbine runner problem, very large scale integration (VLSI) etc. Other optimization combinatorial problems such as the traveling salesman problem, maximal clique, isomorphism and graph partitioning can be formulated as a QAP[9, 10].
Although small QAP instances can be solved with exact solution methods, the optimal solutions for large instances cannot be found due to the computational limitations. However, metaheuristic approaches are robust tools with their ability to produce high quality solutions for such conditions. Harmony Search [11], Simulated Annealing [7], Tabu Search [12, 13], Ant Colony Optimization [14], Genetic Algorithms [15–17], Particle Swarm Optimization [18], Discrete firefly (DFA) [19], the Discrete Cat Swarm Optimization algorithms (DCA) [20] and teaching–learning-based optimization algorithms [21] are some of the well-known of these methods that have been successfully applied to the QAP. The metaheuristic approaches, with their well-known ability, can increase the solution quality for intractable problems. On the other hand, the exact solution methods do not provide much improvement in the size of optimally solvable problem instances since the complexity of intractable problem such as the Quadratic Assignment Problem.
The remainder of the paper is organized as follows: Section 2 briefly introduces the original flower pollination algorithm; this is followed in Section 3 by Elite Opposition- Flower Pollination algorithm for QAP; results analysis are described in Section 4. Finally, conclusions and future work are presented in Section 5.
Flower Pollination Algorithm (FPA) was founded by Yang in the year 2012. The algorithm has been applied to resolve some engineering design problems and its variants are proposed by scholars constantly [22–24, 30–35]. The FPA is inspired by the flow pollination process of flowering plants are the following rules [25]: R1: Biotic and cross-pollination can be considered as a process of global pollination process, and pollen-carrying pollinators move in a way that obeys Le’vy flights. R2: For local pollination, a biotic and self-pollination are used. R3: Pollinators such as insects can develop flower constancy, which is equivalent to a reproduction probability that is proportional to the similarity of two flowers involved. R4: The interaction or switching of local pollination and global pollination can be controlled by a switch probability p ∈ [0, 1], with a slight bias toward local pollination.
In order to formulate updating formulas, we have to convert the aforementioned rules into updating equations. For example, in the global pollination step, flower pollen gametes are carried by pollinators such as insects, and pollen can travel over a long distance because insects can often fly and move in a much longer range. Therefore, Rule 1 and flower constancy can be represented mathematically as:
Where
Here, Γ (λ) is the standard gamma function, and this distribution is valid for large steps s > 0.
Then, to model the local pollination, both Rule 2 and Rule 3 can be represented as
Where
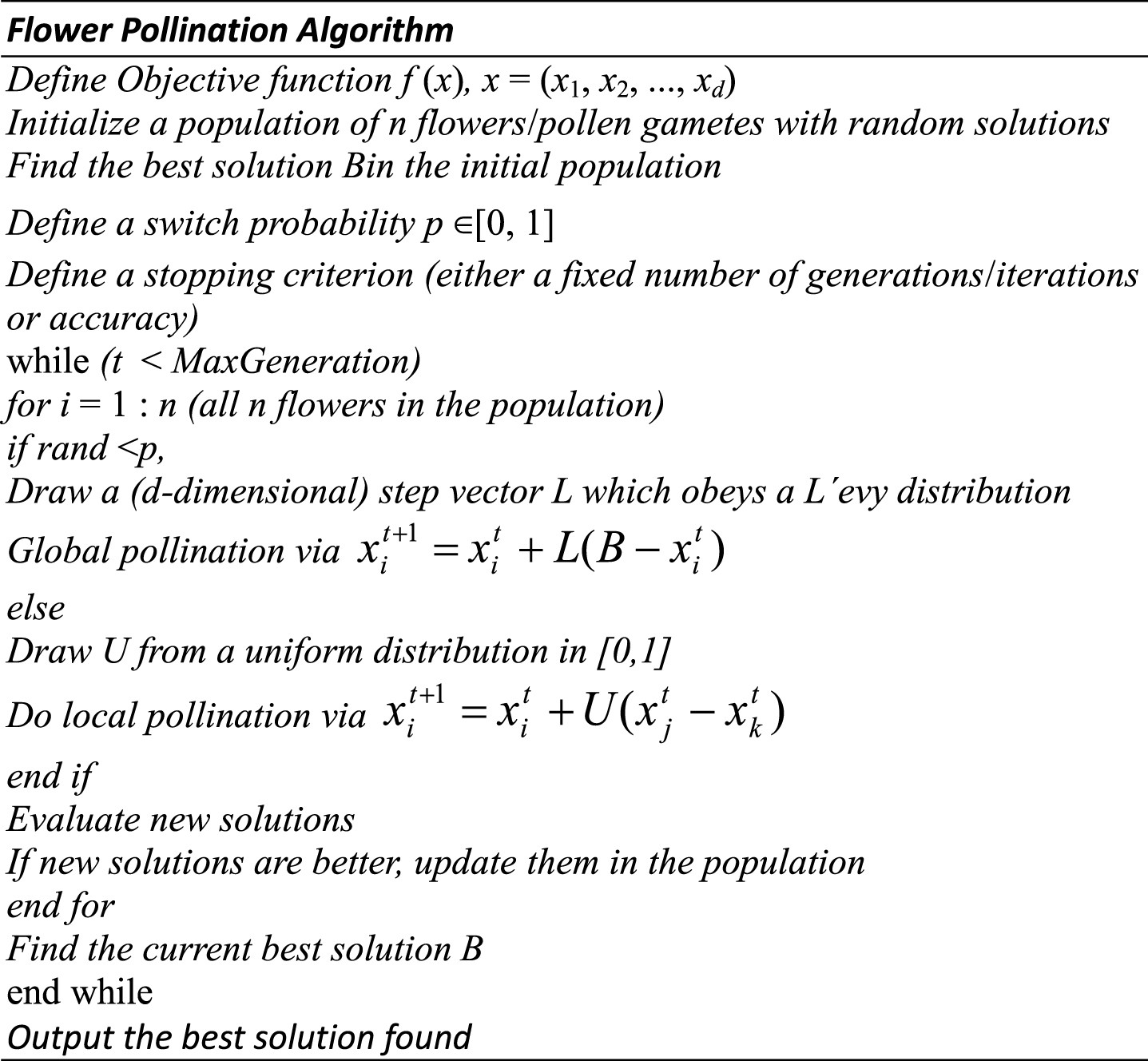
Pseudo code of the Flower pollination algorithm.
Flower pollination algorithm (FPA) is a novel metaheuristic optimization algorithm with quick convergence, but its population diversity and convergence precision can be limited in some applications. In order to enhance the global searching and local searching abilities, we append three optimization strategies to basic flower pollination algorithm (FPA). There are global elite opposition-based learning strategy (GEOLS), local self-adaptive greedy strategy (LSGS) and chaotic switching probability strategy (CSPS).The improvement involves two major optimization strategies. Global elite opposition-based learning enhances the diversity of the population, and the local self-adaptive greedy strategy enhances its exploitation ability [26].
Global elite opposition-based learning strategy (GEOLS)
Elite Opposition-based Learning is a new technique in the field of intelligence computation. Its main ideology is: For a feasible solution, calculate and evaluate the opposite solution at the same time, and choose the better one as the individual of next generation. In this paper, individual with the best fitness value in the population is viewed as the elite individual Basic Flower Pollination Algorithm use Lévy flight in global search process. It is simulated by Lévy distribution.
Basic Flower Pollination Algorithm use Lévy flight in global search process. It is simulated by Lévy distribution. As we know that it is a stochastic process, the probability of getting a good solution is relatively low. For increasing the probability of obtained a better solution to the problem in global search process and expand the searching space, this strategy is applied to the proposed EOFPA. In essence, it is a greedy strategy.
For explaining the definition of elite opposition-based solution, an example should be exhibited. If we suppose that the elite individual of the population is X e = (xe,1xe,2, …, xe,D) For the individual x i (xi,1xi2, …, x iD ), the elite opposition-based solution of X i can be defined . And it can be obtained by following equation:
As we know that the shrink of searching space may cause algorithm stuck in local minimal. Thus, in this proposed algorithm, we will update da
j
and db
j
every 50 generations. Dynamic bound is good at restoring searching experience. but it can make
In global searching process, this strategy expands the searching space of algorithm and it can strengthen the diversity of the population, thus the proposed global searching ability can be enhanced by this optimization strategy.
Standard Flower Pollination Algorithm use DE to conduct local search. And it is known to us that the searching ability of standard DE is not good enough to solve high-dimensional optimization problems. For improving the local search, this local self-adaptive greedy strategy is added to the proposed algorithm. In local searching process, if X = (xi,1xi,2, …, xi,D) is the ith individual in the population, we can find a greedy solution x
′
in the neighbor of it by following equation:
In FPA, local search and global search is controlled by a switch probability p ∈ [0, 1], and it is a constant value. We suppose that a reasonable algorithm should do more global search at the beginning of searching process and global search should be less in the end. Thus, we apply chaotic Switching Probability Strategy (CSPS) to adjust the proportion of two kinds of search. Switch probability p can alter according to the following equation:
Clearly, Y n ∈ [0, 1] under the conditions that the initial Y0 ∈ [0, 1], where n is the iteration number and μ = 4 . The selected chaotic map for all problems is the logistic map, according to the above equation. The basic steps of EOFPA can be summarized as the pseudo-code shown in Fig. 3.
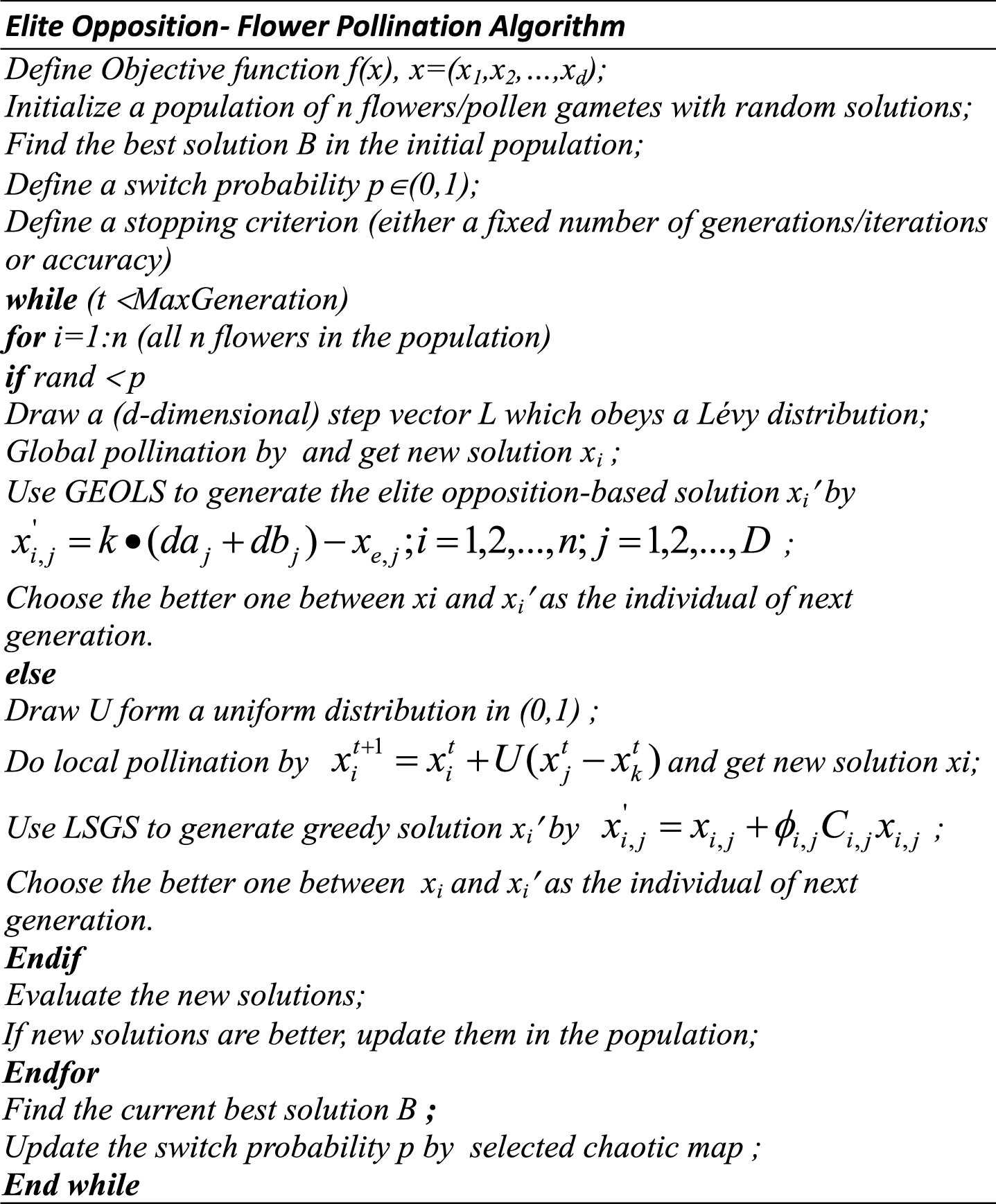
Pseudo code of the EOFPA.
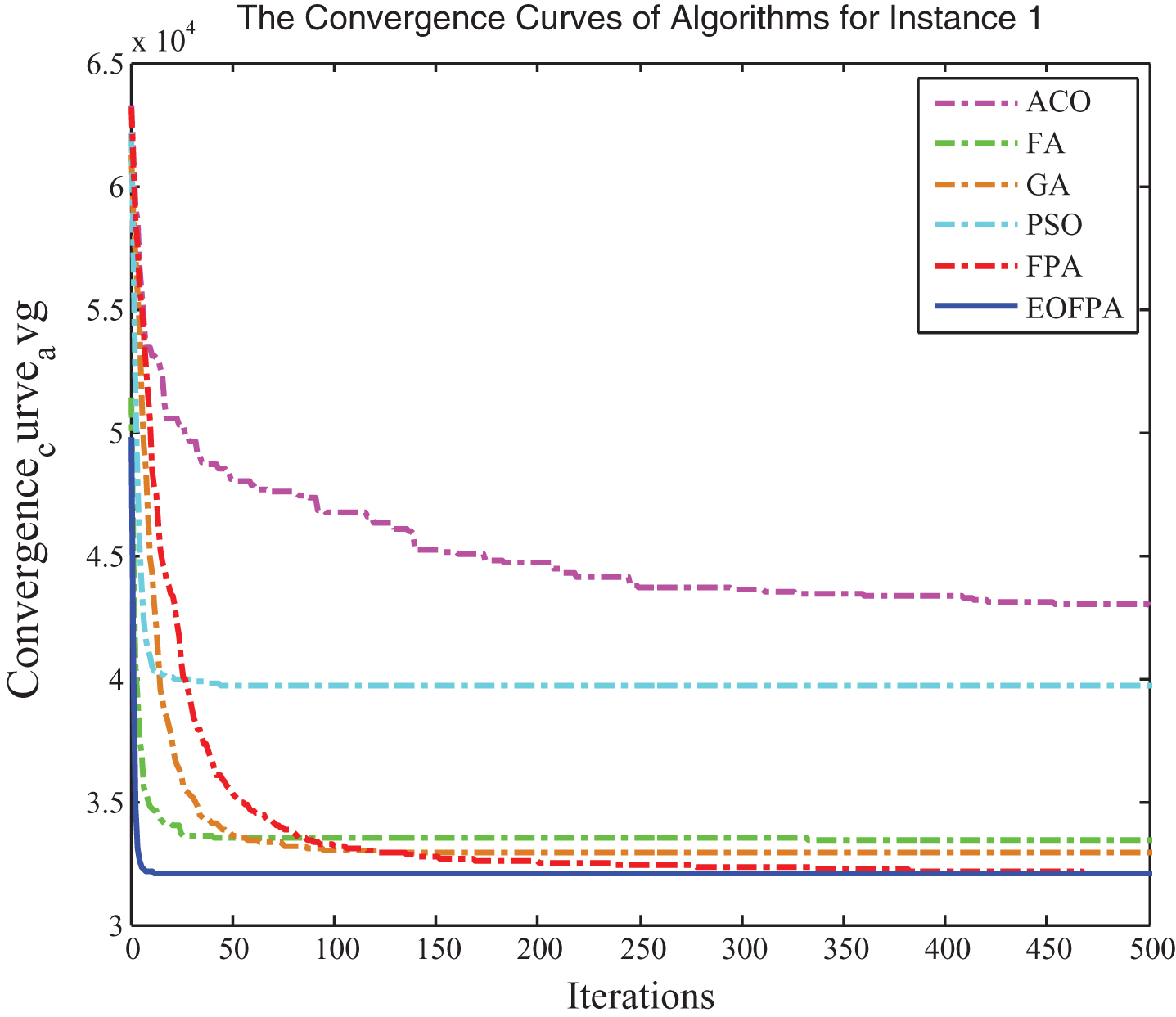
The convergence curves for instance 1.
For unconstrained problem, its global best solution is the one who has the minimum objective function value. In the meantime, it is hard to measure and determine the global best solution of constrained problem, for it is difficult to find a balance between the constraints and the objective function value.
Handling constraints
One of the well-known techniques of handling constraints is penalty function, which transforms constrained problem into unconstrained one, consisting of a sum of the objective and the constraints weighted by penalties. By using penalty function methods, the objectives are inclined to guide the search toward the feasible solutions. Here, we create a new penalty function to tradeoff the constraints and the objective function value. This method adopts the information of all solutions. The new fitness function can be defined as:
Experimental results and analysis
Experimental setup
All the experiments were performed on a Windows 7 Ultimate 64-bit operating system; processor Intel Core to Duo CPU 2.20 GHZ; 4 GB of RAM and code was implemented in MATLAB.
Comparison results
In a facility layout problem in which there are n facilities to be assigned to n given location. The QAP formulation requires an equal number of facilities and locations. If there are fewer than n, say m < n, facilities to be assigned to n locations, then to use the QAP formulation, n-m dummy facilities should be created and a zero flow between each of these and all others must be assigned (including the other dummy facilities). If there are fewer locations than facilities, then the problem is infeasible [27]. In this section, some instances from Quadratic Assignment Problem Library (QAPLIB) and two artificial instances are designed to test the performance ofEOFPA.
Instances from QAPLIB
Numerous examples have been done to verify the weight of the planned algorithm. The standard flower pollination algorithm (FPA) [25], particle swarm optimization (PSO) [18, 28], Discrete firefly (DFA) [19] and the Discrete Cat Swarm Optimization algorithms (DCA) [20] are tested on some instances (benchmarks) of QAP taken from the publicly available electronic library QAPLIB of QAP problems [29]. Most of the instances included in QAPLIB have already been solved in the literature and their optimality results can be used to compare algorithms. The numerical value in the name of an instance represents the number of provided cities.
The values of parameters of the proposed algorithm are selected, based on some preliminary trials. The initial parameters of standard flower pollination algorithm are set at n = 50, p = 0.8 and the number of iterations is set to t = 1000.
As can be seen in Tables 1, 2, the EOFPA has demonstrated an overwhelming advantage over the other algorithms on solving Quadratic Assignment Problems with large scales. The best solutions found by the EOFPA are all better than those obtained by the other algorithms. Furthermore, the best solutions found by the EOFPA are even better than the best solutions obtained by DFA. The EOFPA has better performance than the DFA on solving the nine problems.
Summarize the experiments results between EOFPA, FPA, particle swarm optimization algorithm, discrete cat algorithm and discrete firefly algorithm
Summarize the experiments results between EOFPA, FPA, particle swarm optimization algorithm, discrete cat algorithm and discrete firefly algorithm
‘–’ means the instance not tested with the algorithm.
The experiments results between the proposed method and discrete firefly algorithm [19]
In this section, two artificial instances are tested in this subsection. The details of the instances are given in Table 3. x and y are represented the x-coordinate and y-coordinate of each locations respectively. And the flow between the facilities are listed in the form of array. The details of the instances are given as follows:
The details of the two artificial instances
The details of the two artificial instances
To evaluate the performance of EOFPA, it is compared with ACO [14], FA [19], GA [15], PSO [18, 28], FPA [25]. The maximum generation of all algorithms is set as 1000, the population size are set to 100. The parameters setting of the mentioned algorithms are given in Table 4. The setting values of algorithm control parameters of the mentioned algorithms are given below.
Values of parameters of each of the rival algorithms
Each algorithm is applied 20 times individually with random initial solution. The comparison of test results is shown in Table 5, the Best, Worst, Mean and Std represent optimal fitness values, worst fitness value, mean fitness value and standard deviation respectively. It is apparent that the best value of FA, GA and FPA reach the same result as EOFPA, which means the four algorithm can get the same optimal value both in instance one and instance two. While, the worst value, standard deviation and mean values of FPA and EOFPA are much better than other algorithms. Especially in instance two, EOFPA is superior to other five algorithm. Figures 4 and 6 show convergence curves of the six algorithms in solving the two artificial instances. It is easy to find that the curve of EOFPA is much smoother than other algorithms and its convergence speed is faster. It is clear to see the superiority in EOFPA compared with ACO, FA, GA and PSO in terms of ANOVA tests as shown in Figs. 5 and 7. The boxplot for EOFPA have smaller value and less height than those of ACO, FA, GA and PSO and achieves the better results to EOFPA in instance two.
The experiments results of six algorithms for two artificial instances
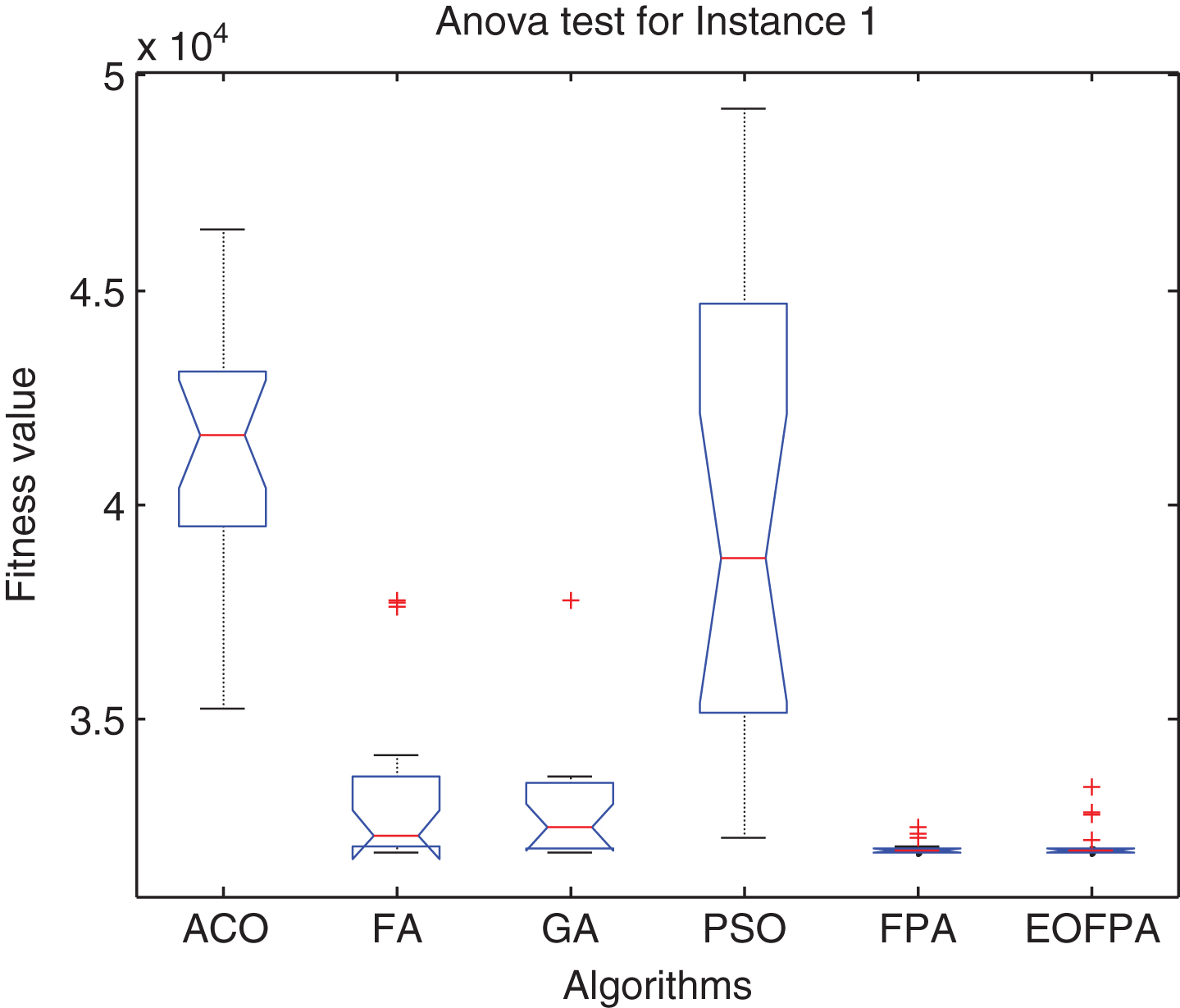
Anova test for instance 1.
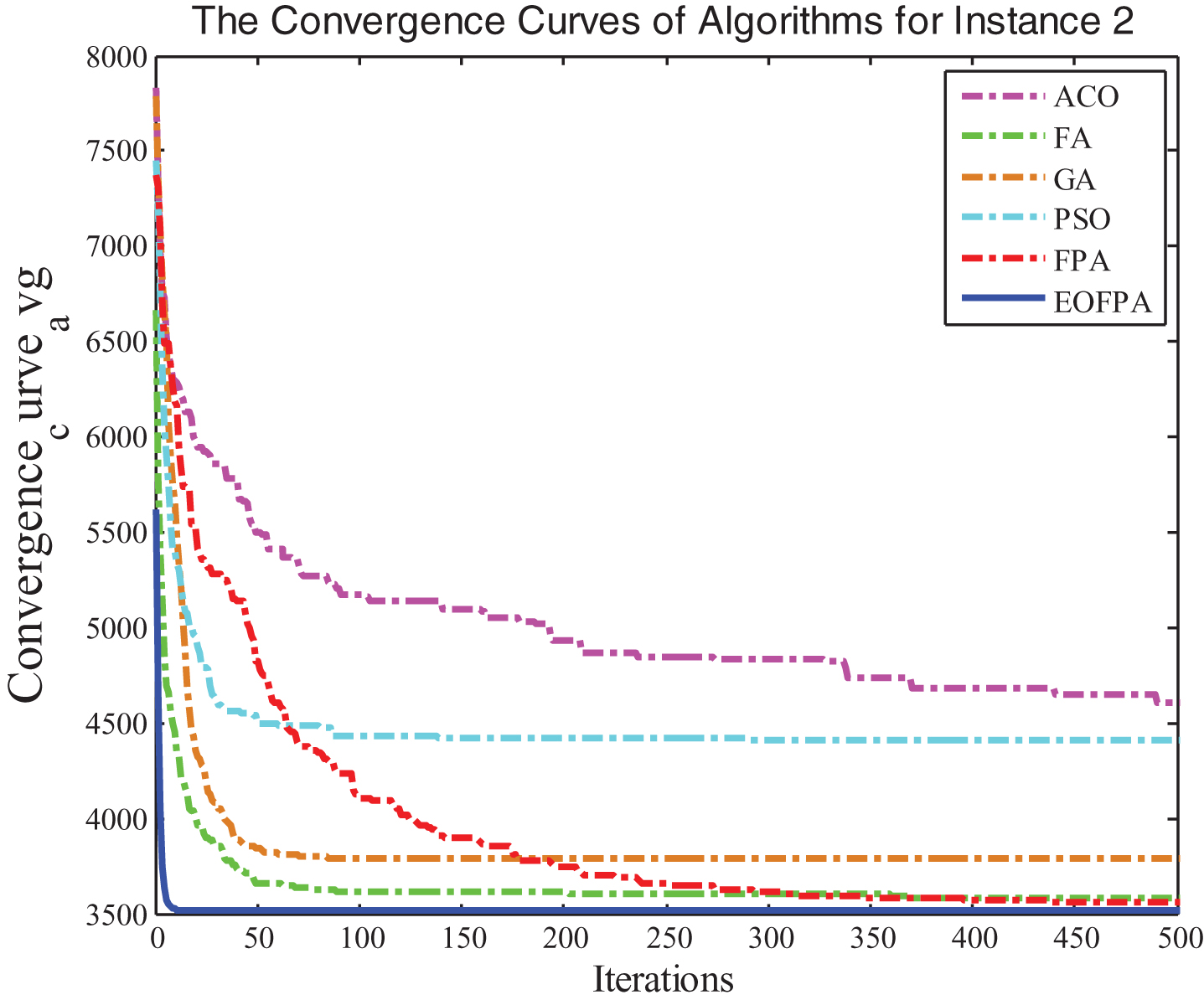
The convergence curves for instance 2.
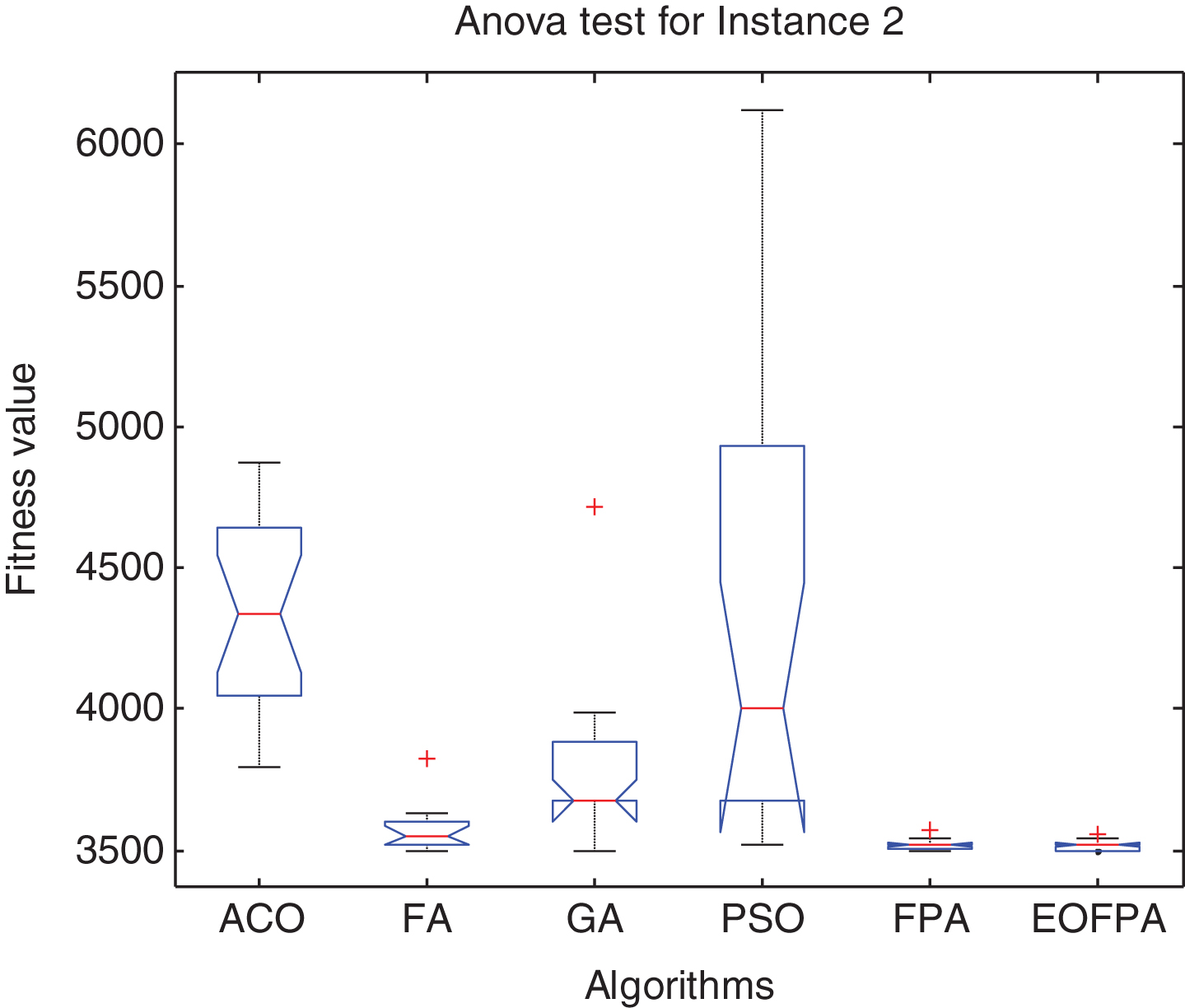
Anova test for instance 2.
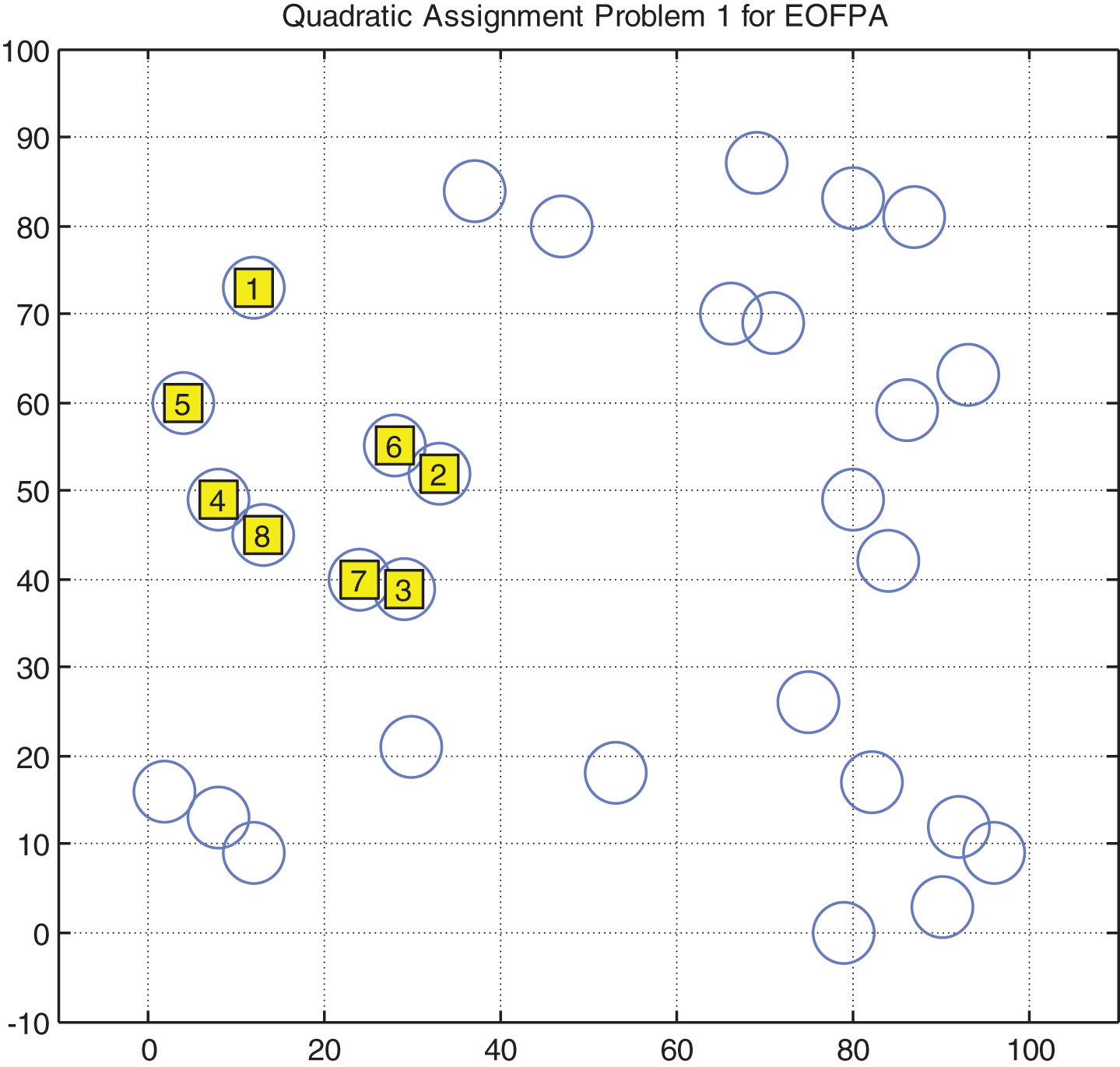
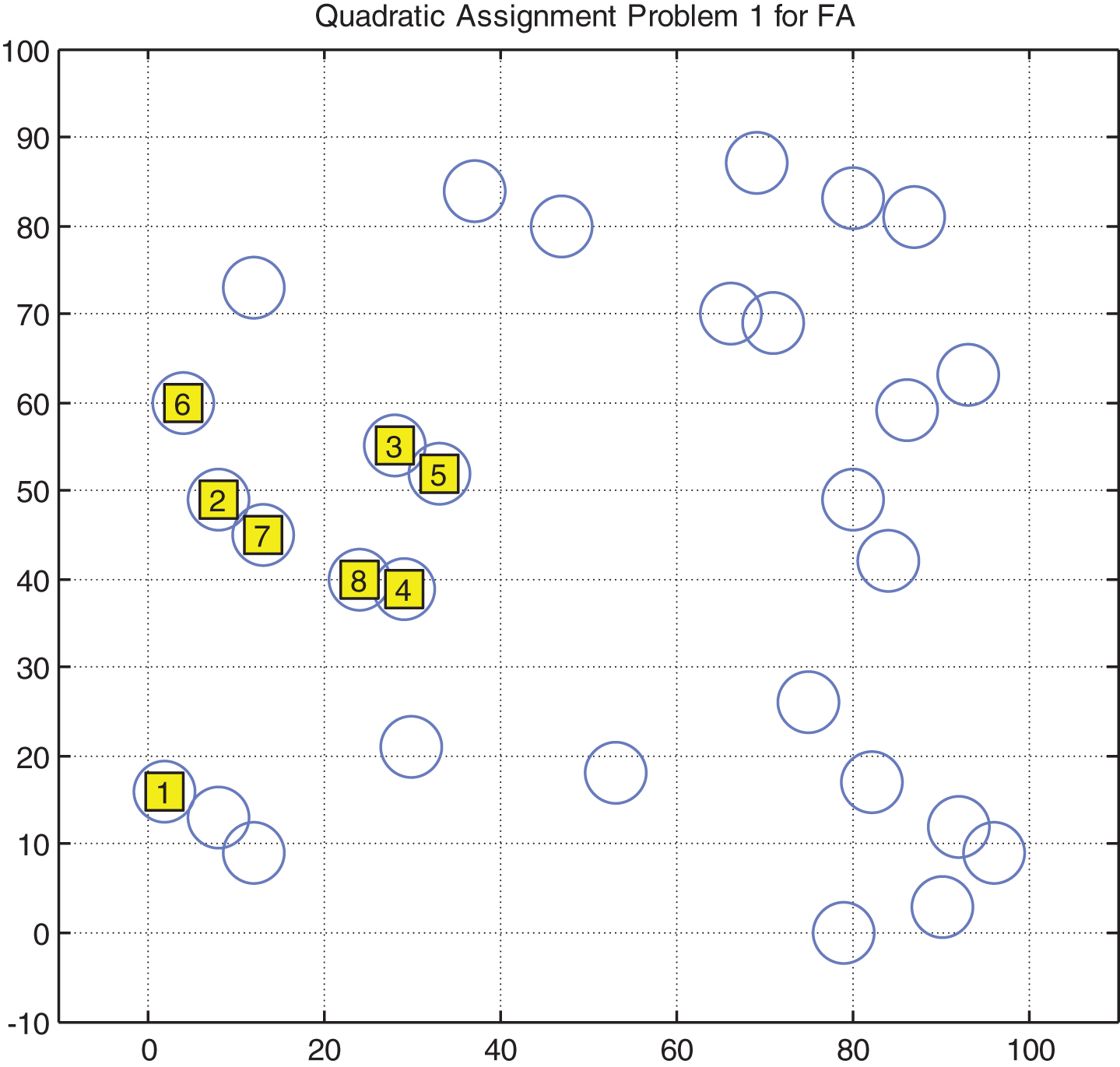
Artificial QAP instances 1 for EOFPA.
In this subsection, the two artificial instances are selected to carry out the graphical comparison between EOFPA and other algorithms. The maximum generation is set to 20 to demonstrate the superiority of EOFPA. The graphical results of EOFPA for the two instances are presented in Figs. 7 and 10. Circles represent the given locations and the concentrated yellow labels indicate the facilities are wellassigned.
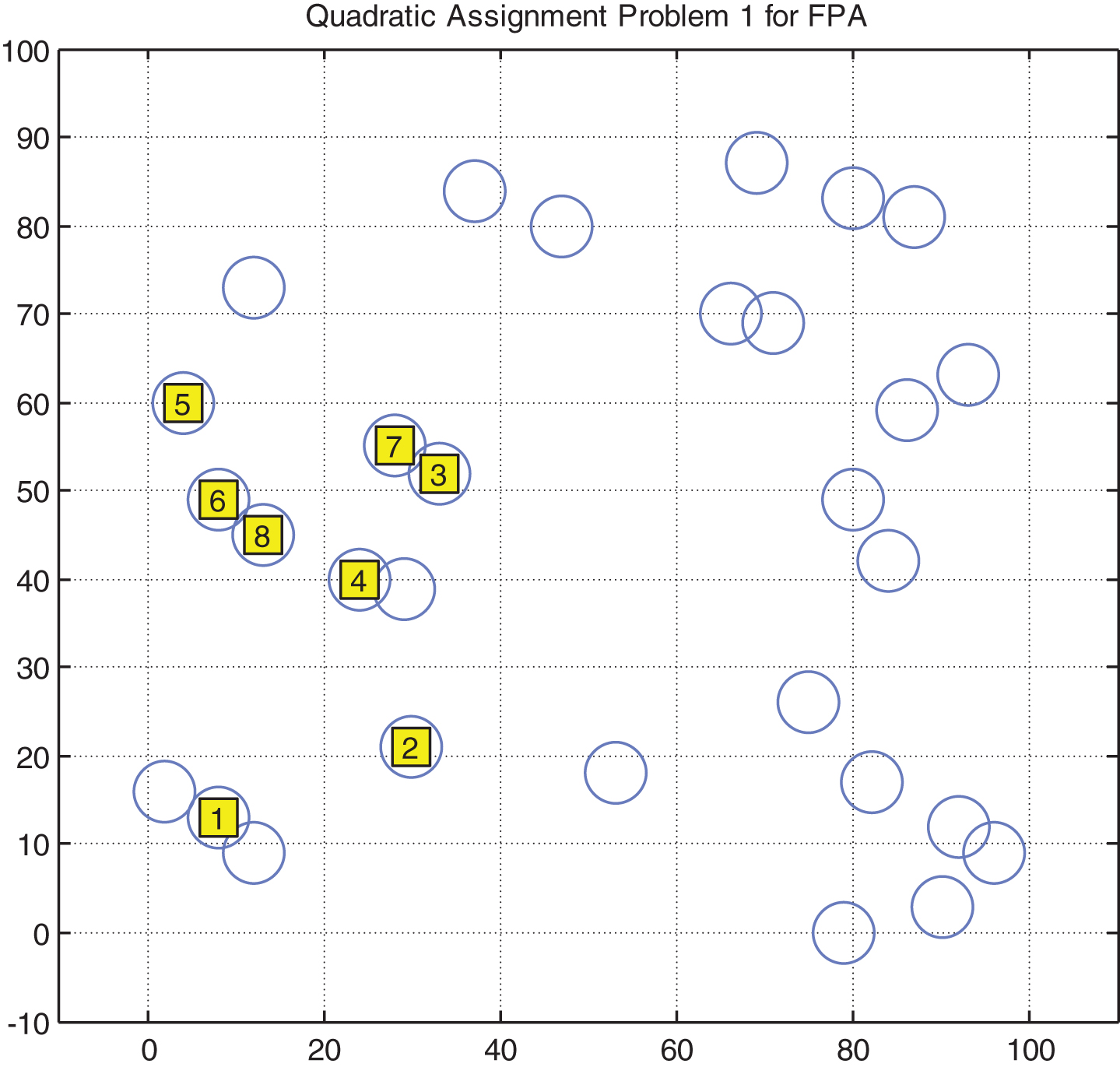
Artificial QAP instances 1 for FPA.
Artificial QAP instances 1 for FA.
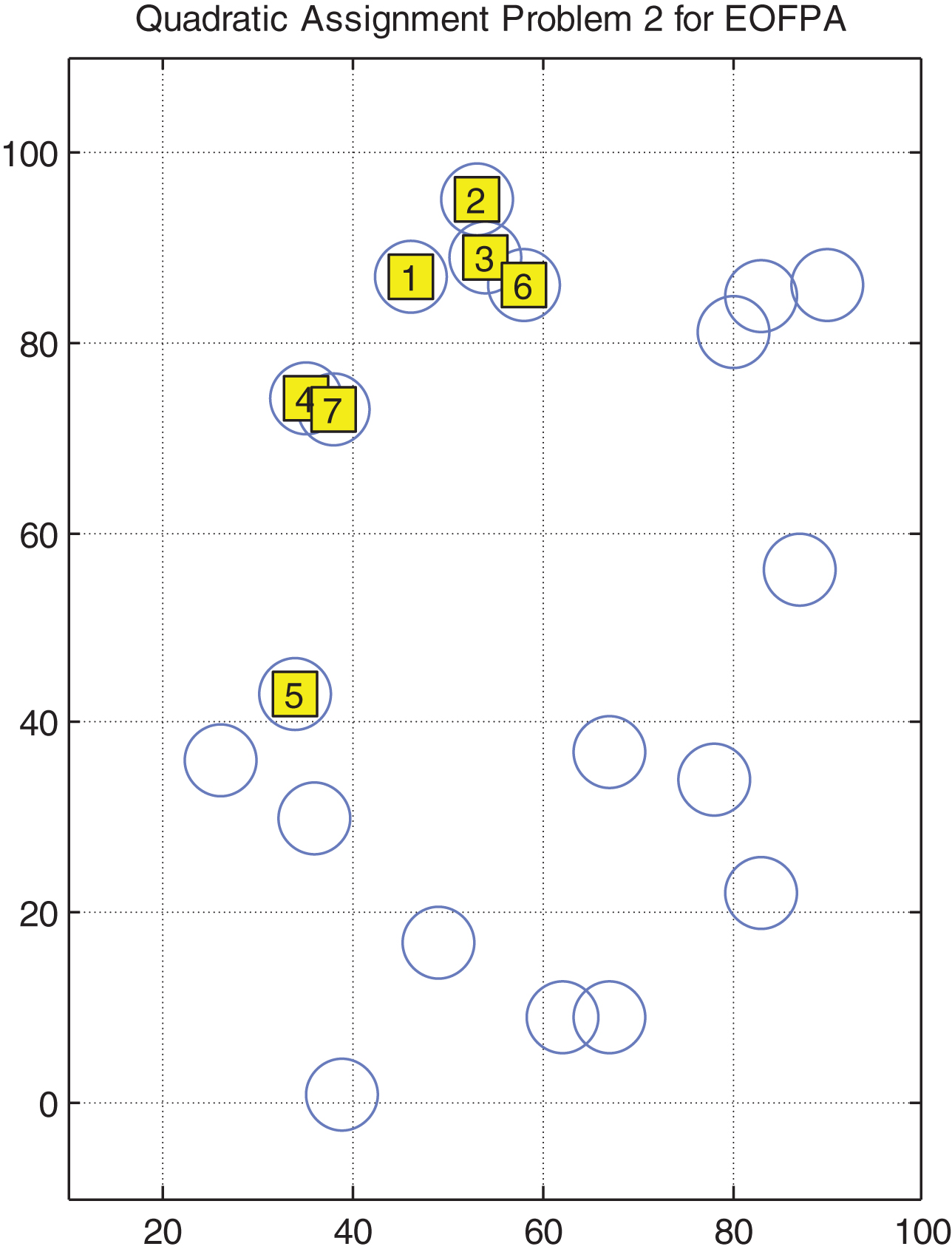
Artificial QAP instances 2 for EOFPA.
As shown in Table 5, the numerical value of FPA is very close to EOFPA and both the two algorithms are perform better than other algorithms. A further comparison to demonstrate the differences of efficient ability between FPA and EOFPA are shown in Figs. 9 and 12. In contrast to Figs. 8 and 11, the yellow labels are not concentrated in Figs. 9 and 11. In order to carrying out another comparison for instance one, FA is selected cause the algorithm performs well in the speed of convergence and stability, which can be concluded from Figs. 4 and 6. The comparison is illustrated with Figs. 8 and 10 and only one facility is not located in a better location shown in Fig. 10. Figures 11 and 13 are drawn for the comparison for instance two between PSO and EOFPA, witch directly show the superiority of EOFPA in QAP.
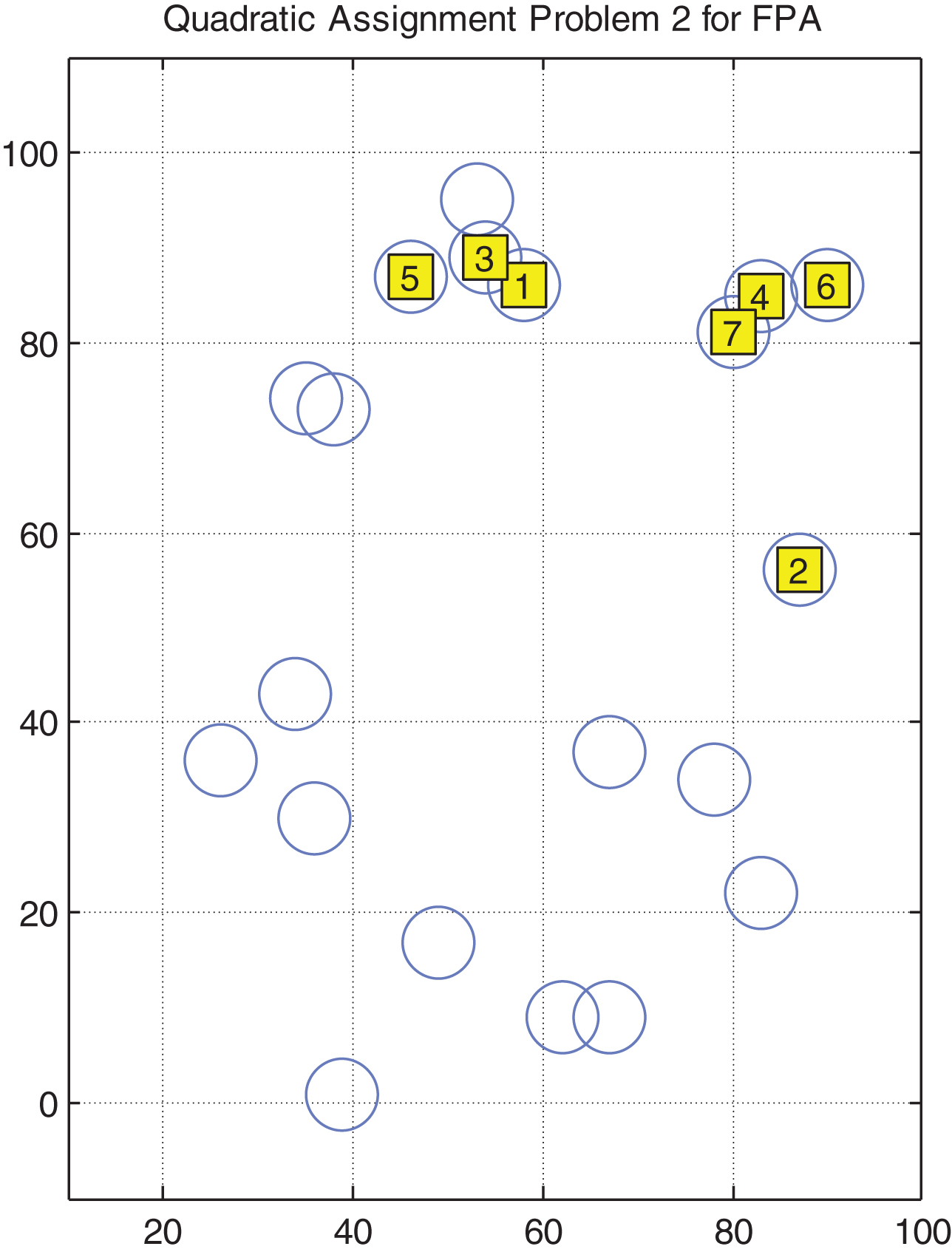
Artificial QAP instances 2 for FPA.
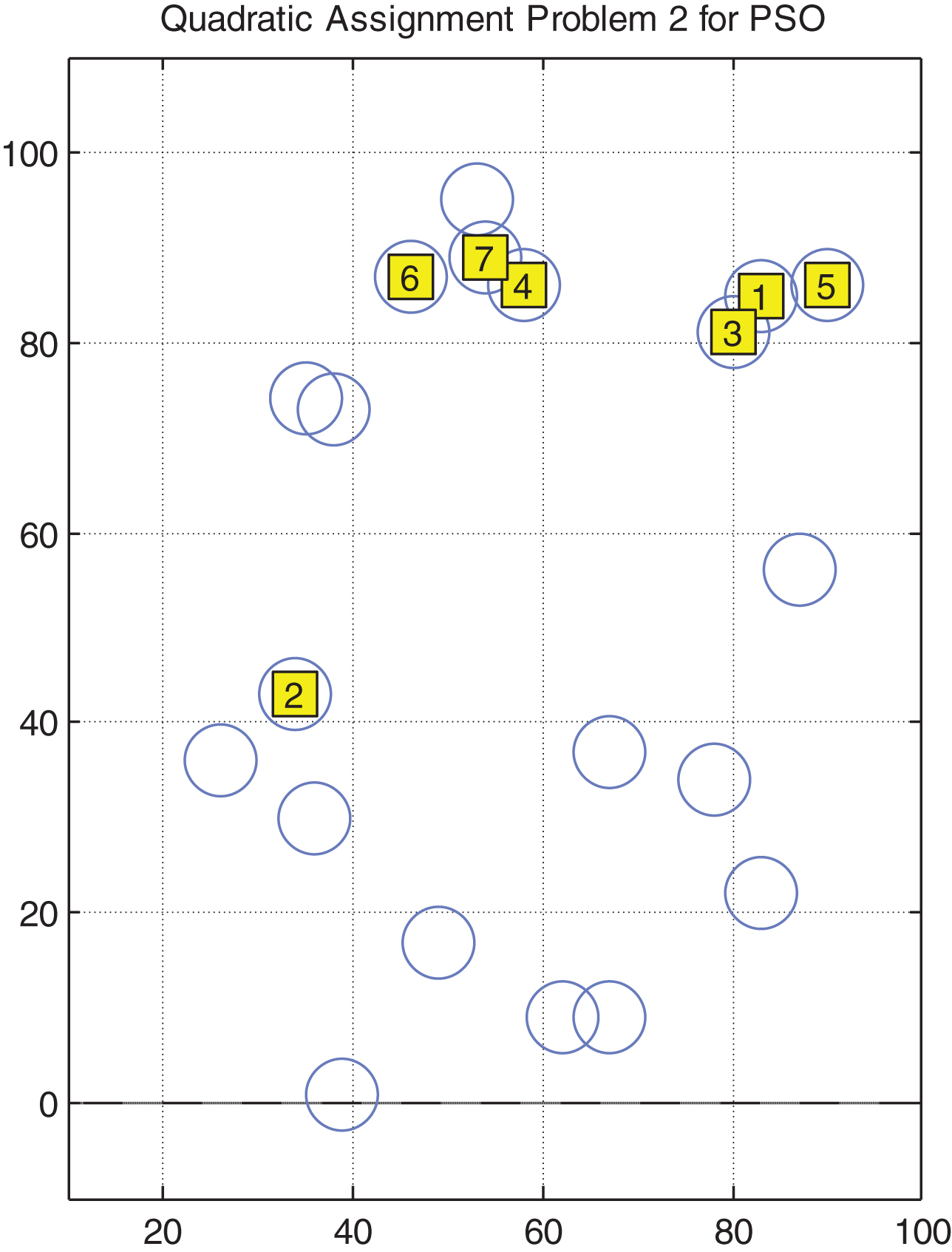
Artificial QAP instances 2 for PSO.
The Quadratic Assignment Problem (QAP) is a well-known NP-hard combinatorial optimization problem that has received a lot of attention from the research community since it has many practical applications, such as allocation of facilities, backboard Wiring, scheduling, process communication, design typewriter keyboard, etc. In this paper, we present an Elite Opposition-Flower Pollination Algorithm for solving the Quadratic assignment Problem. In the computational results, firstly, we evaluate the performance of our algorithm on widely known instances from the literature. In these experiments, we compare our algorithm against the best proposals from the related literature and we determine that our algorithm exhibits mostly better performance than other algorithms, which is one of the best method for solving the QAP and find the latest best solutions of many benchmark QAPs in QAPLIB. Secondly, two artificial instances, in which the number of facility is fewer than location, are tested using the QAP formulation. The results illustrate that EOFPA performs better than ACO, FA, GA and PSO. Meanwhile, it is powerful in convergence speed and is equipped with strong robustness compared with other algorithms. The graphical results give a further comparison to demonstrate the superiority of EOFPA in efficient ability.
For future work, the EOFPA will be extended to more QAP instances with different types and sizes and more algorithms can be applied to be conducted. For the constrained engineering optimization problems, it is often challenging to obtain high equality solution. The EOFPA should be used to solve these optimization problems to validate its superiority. In order to test the performance of EOFPA comprehensively, the existed NP-hard problems in literature, such as traveling salesman problem and graph coloring problem, should be solved in the future. Also, new adaptive mechanism can be adopted to the original FPA to enhance its search ability in the future research.
Footnotes
Acknowledgments
This work was supported by the National Science Foundation of China under Grants Nos. 61463007, 61563008.