
Abstract
This paper deals with MATLAB/SIMULINK simulation and analysis of a position sensor-less field oriented control of permanent magnet synchronous motor. Adaptive position estimators are required as the parameters of the machines like rotor resistance, inductance changes sometimes. Adaptive position and speed estimators viz. SMO, MRAS are much discussed in literature but the artificial neural network, adaptive neuro-fuzzy inference based estimators are least discussed. In this paper a MATLAB study of MRAS, ANN and ANFIS based position estimator in a Field oriented control of a permanent magnet synchronous motor drive is being done. MRAS, ANN, ANFIS estimators adaptive in nature so these estimators can adapt if there is any parameters change online. The performances of these three drives are analyzed, and results are compared. It is seen that ANFIS based system performance is better even when the parameters of the machines vary with time. This work is limited to analysis and simulation only and could be extended to a practical realization in future work.
Keywords
Introduction
AC machines are showing a crucial role in industrial development during the last many decades. Different types of ac machines have been used to drive the industrial conveniences such as paper mills, cranes, waste water treatment, steel process lines, robot arms, conveyor belts, etc. Since the 1980’s, ac drives are building the marvelous impact in the part of variable speed drive control systems due to advancement in the field of power electronics, computer-aided design techniques, application specific ICs, microprocessors and converter topologies [1–7]. Permanent magnet synchronous machine (PMSM) drives have been progressively used in various industrial applications. The several reasons which leads to increase in demand of PMSM is its high torque to weight ratio, high power density andefficiency.
Field-oriented control involves the familiarity of the rotor position and speed [8, 9]. Shaft encoder, resolver, and hall sensors are generally applied to measure the rotor speed and angular position. However, the use of such sensors increases the encumbrance of the overall drive system and cost; and reduces its reliability and control robustness. Moreover, it is challenging to fit and keep a position sensor at its position due to inadequate assembly space and stiff working situation with severe vibrations and high temperature. Therefore, numerous position sensor-less control schemes have been reported in the literature [13–20]. Moreover some adaptive estimators viz. Sliding Mode Observers (SMO) [13–15], Model Reference Adaptive System (MRAS) [16], Variable Structure Controller and Self Tuning Regulator, Artificial neural network (ANN) [18], adaptive neuro-fuzzy inference system (ANFIS) [19, 20] are proposed in the literature. These position estimators requires an accurate system model for proper functioning. Unattainability of correct system model often causes to a cumbrous design tactic. Present days substantial attention have been given on the application of the artificial neural network (ANN) in control and modeling of drives due to its inherent characteristics like the ability of adaptively parallel computing, distributed structure, ability to learn and identify non-linear dynamics. Use of ANN in control and modeling is available in the literature, but limited literature is found for application of adaptive neuro-fuzzy inference system in position/speed estimation of rotor for field oriented control (FOC) of PMSM. In this paper, modeling of PMSM, its FOC and position/speed estimator-MRAS, ANN, ANFIS based is done in MATLAB/SIMULINK environment. Results of MRAS, ANN, and ANFIS based FOC are compared in the result section. Section 2 deals with system modeling and the results are shown in Section 3. Section 4 presents the discussion and finally Section 5 gives the conclusion. Future scope is discussed in section 6.
System modeling
Modelling of PMSMs in the stationary reference frame
The cross-sectional sight of basic symmetrical three-phase, two-pole PMSM, wye connected concentrated identical stator windings is shown in Fig. 1 [10]. The distributed windings produces sinusoidal Magneto Motive Force waves placed at the magnetic axis of the respective phases at every instant. Each phase windings are displaced by 120° electrical from each other and δ is the angle of rotor position, which is between the magnetic axes of the rotor magnet flux and stator winding (i.e. d-axis) as shown in Fig. 1. The positive direction of the magnetic axes of the stator windings coincides with the direction of f
as
, f
bs
, f
cs
. The angular velocity of the rotor is Cross-sectional sight of a basic symmetrical three-phase, two-pole PMSM wye connected stator.
In modeling of PMSM, some assumptions are made which is given below. The induced EMF is sinusoidal. Saturation is neglected. There are no field current dynamics. Hysteresis and Eddy currents losses arenegligible.
The three-phase voltage equations can be stated as:
The Equation (1) can be changed from (abc) frame to (αβ) frame as:
Considering the variables in rotor reference frame, the voltage equation can be written as:
The Equation (3) can also be expanded in different arrangement as
The equivalent circuit model of PMSM in dq reference frame can be derived from above Equations (1–6) and is shown in Fig. 2. Modelling of PMSM in dq reference frame.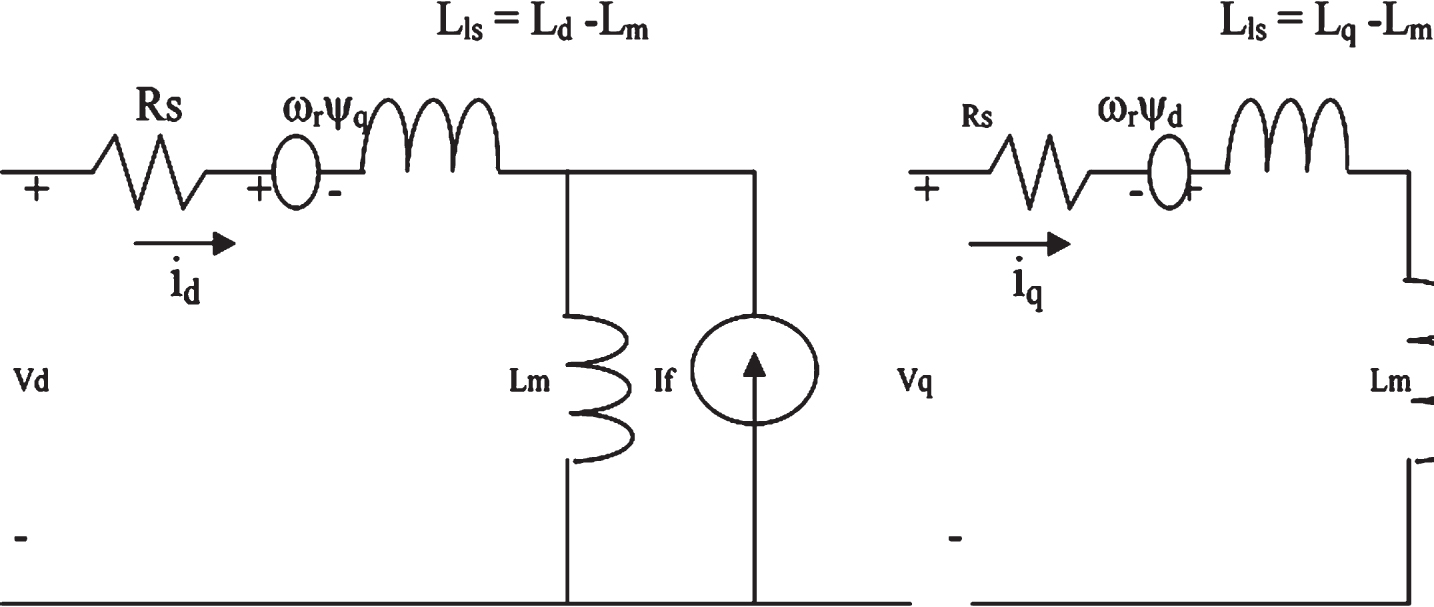
Electromagnetic torque developed in the machine can be represented with the stator variables in the rotor reference frame as:
The torque expression can also be written as:
The torque equation (mechanical) is expressed as:
The above Equations (1–10) are used to model the PMSM in SIMULINK. The block diagram of the sensor-less vector control of a PMSM is represented in Fig. 3. Block diagram of sensor-less vector control of PMSM.
FOC of PMSM requires a position and speed sensors like tacho-generator, pulse encoder or a revolver for feedback application. Moreover, the position sensor brings the system at high cost and low reliability. Hence sensor-less drive system has become a common anticipating object for instrument engineers. Many techniques have been developed for position and speed estimator so far. These techniques for position and speed estimator involves exact system modeling. Hence, in case of online parameter change of machine, the variable estimated values varies from the real values. Model reference adaptive system is a system which is having adjustable properties. Thus, it gives proper result even in the case of an online parameter change of machine. Figure 4 shows a block diagram of an MRAS speed estimator. Speed is integrated to obtain rotor position for transformation required for FOC. MRAS speed estimator.
The Artificial Neural Network (ANN) is efficient in solving various engineering problems. Here ANN is applied as a universal function approximator to assess the PMSM speed and position moved by FOC drive. The multilayer perceptron time delay neural network (TDNN) has been applied. The delay in the input quantity shows that network output depends on the previous conditions. ANN network is skilled in offline form by the data collected from simulation using the encoder with the drive. The structure of the proposed estimator in the paper is shown in Fig. 5. The voltage and current are the input to ANN speed is the output which gives rotor position after integration. Generic ANN model.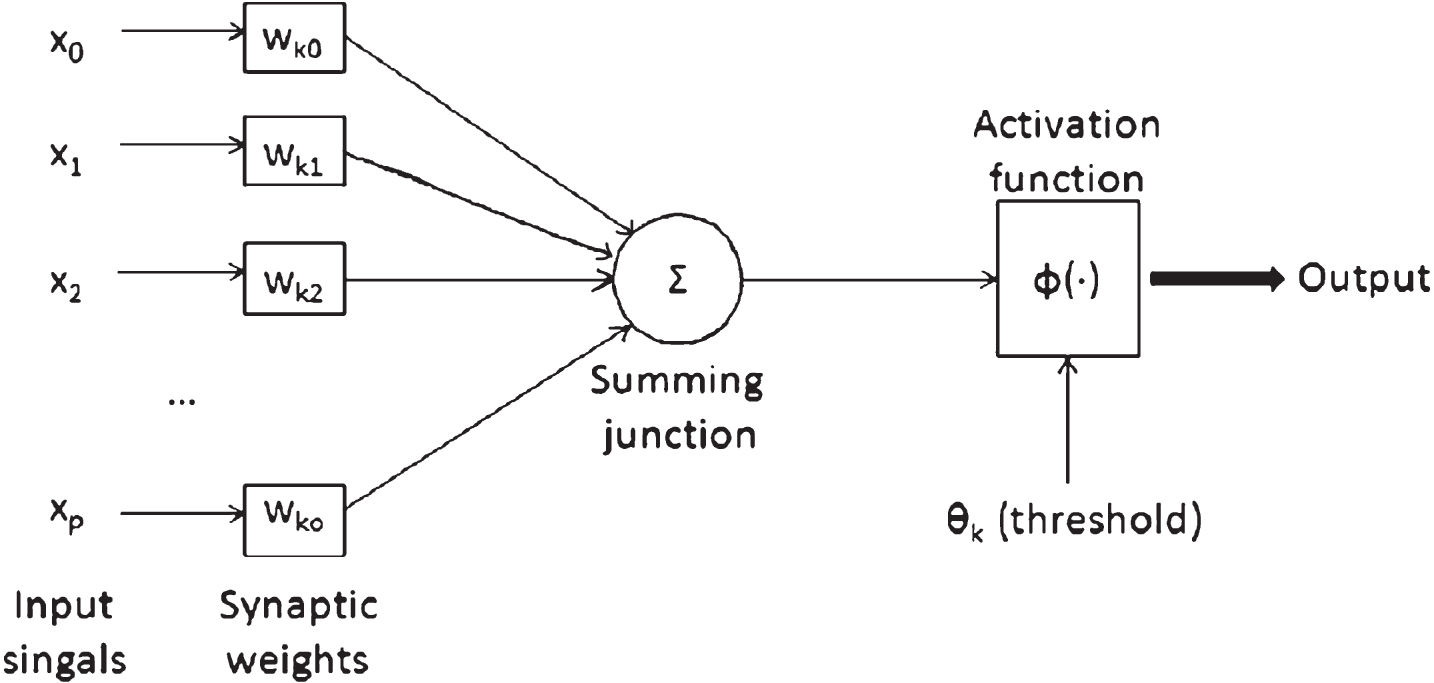
ANN and Neuro-Fuzzy controller (NFC) have received much consideration nowadays in modelling of non-linear systems by researchers in order to combine the merits of both. ANFIS is an extension of NFC which is used as controller and parameter estimation. It is reported to have fast convergence, better tracking, and adaptive capabilities. The capability of ANFIS for handling nonlinearity, adapting parameter change empowers it to be used as speed estimator for a PMSM drive. The ANFIS network is also skilled in offline form by data collected from the simulation using the encoder with the drive. The ANFIS structured as shown in Fig. 6. The proposed algorithm is simulated in MATLAB Simulink. ANFIS structure.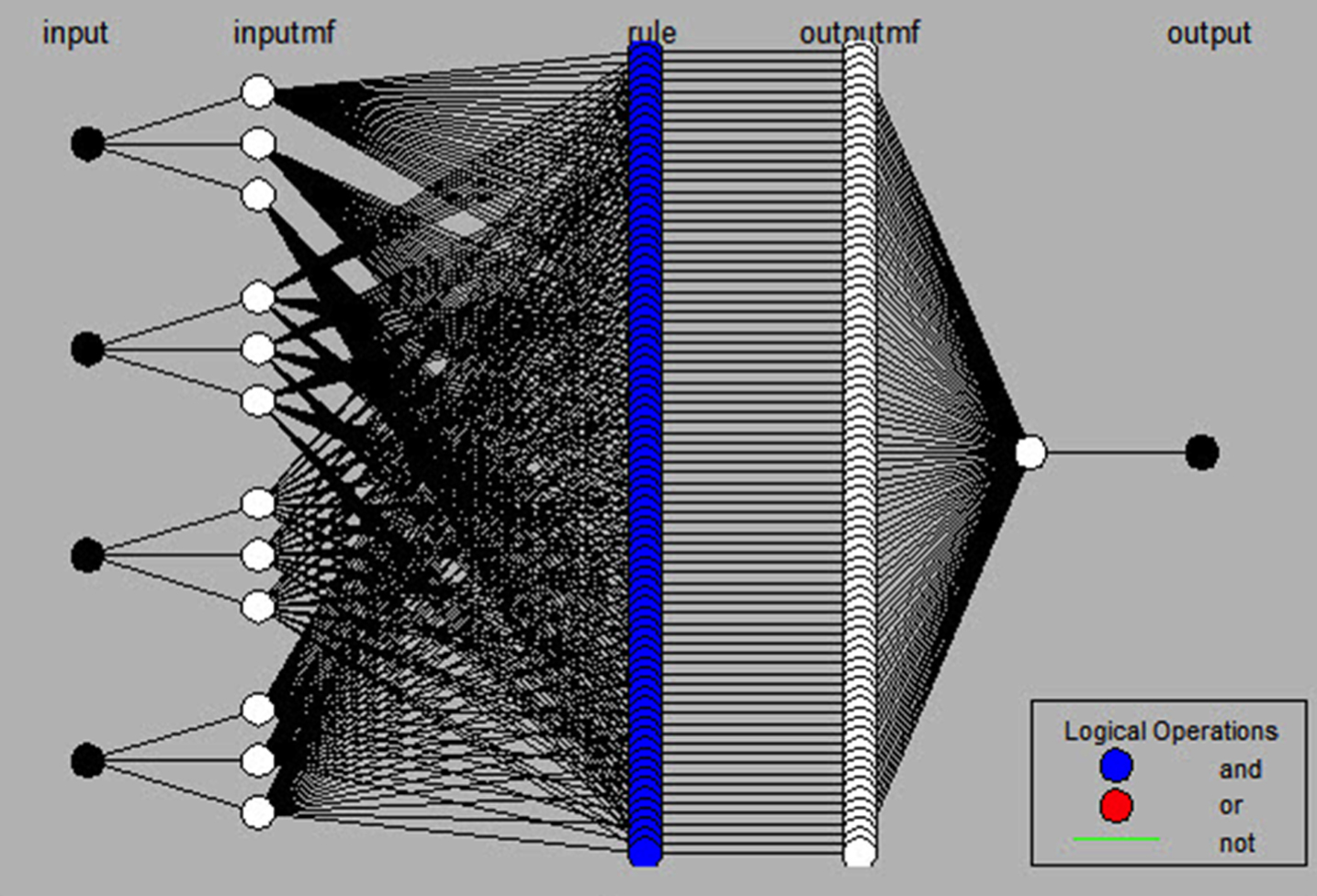
PMSM parameters
PMSM parameters
Simulation of PMSM drive is done in MATLAB/SIMULINK software package. FOC is selected in order to operate the drive it in constant torque region. So as to make the drive sensor-less, there are different tactics for estimation of speed and rotor position. Out of these MRAS, SMO, ANN, and Neuro-Fuzzy (ANFIS), based speed and rotor position estimation have been selected for the study because of it adaptive capabilities. In the work, MRAS, ANN, and ANFIS estimator are designed and operated in the simulation. The performance factors, training errors, etc. are not produced to reduce the length of the paper. SIMULINK model has been developed by putting the values of various PMSM parameters equal to the values given in Table 1. At time t = 0.001 sec, a torque of 2.5 N.m has been applied and the machine is operated at no load. Due to no load, the drive attains the reference speed rapidly and fluctuation in speed is also small.
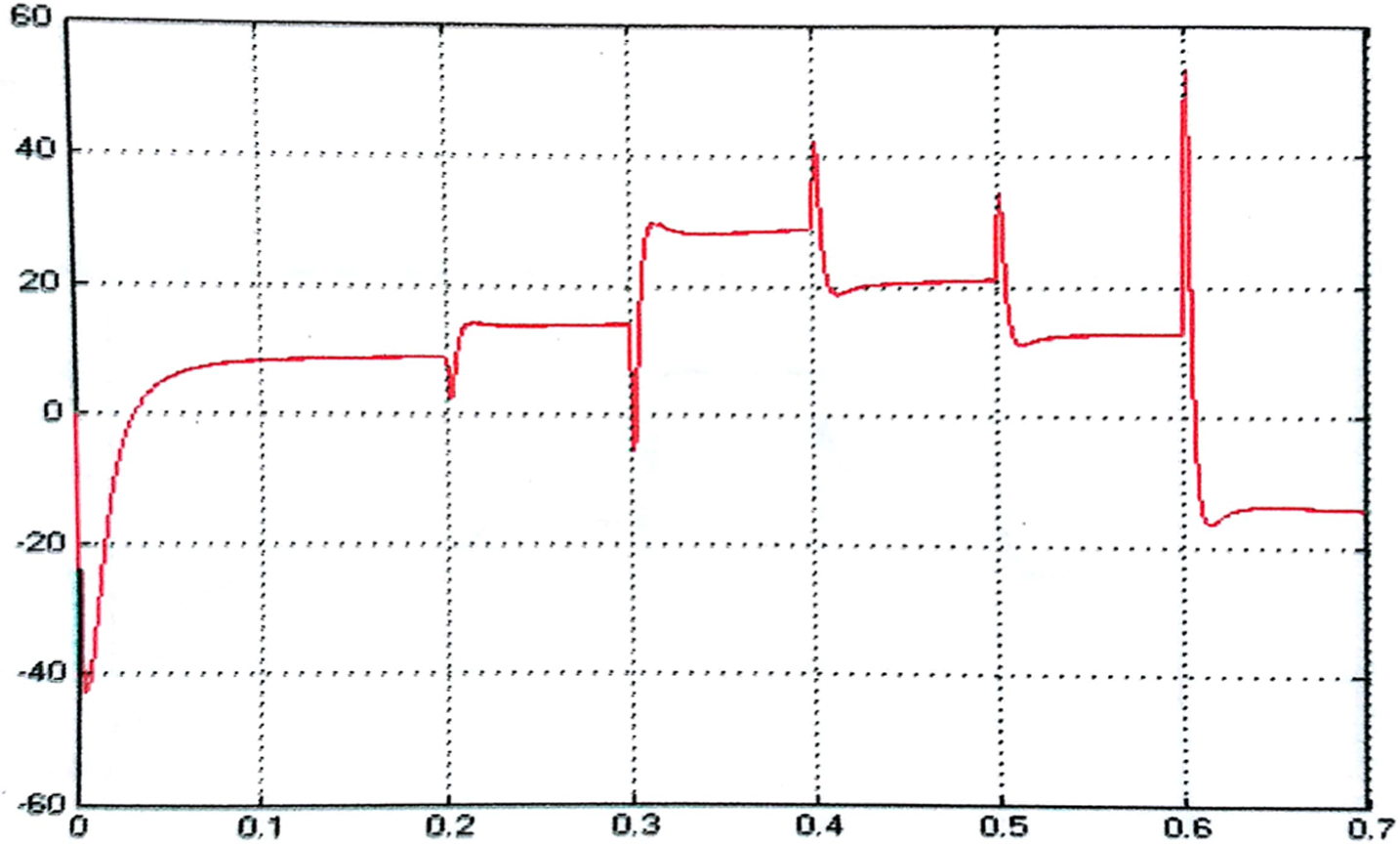
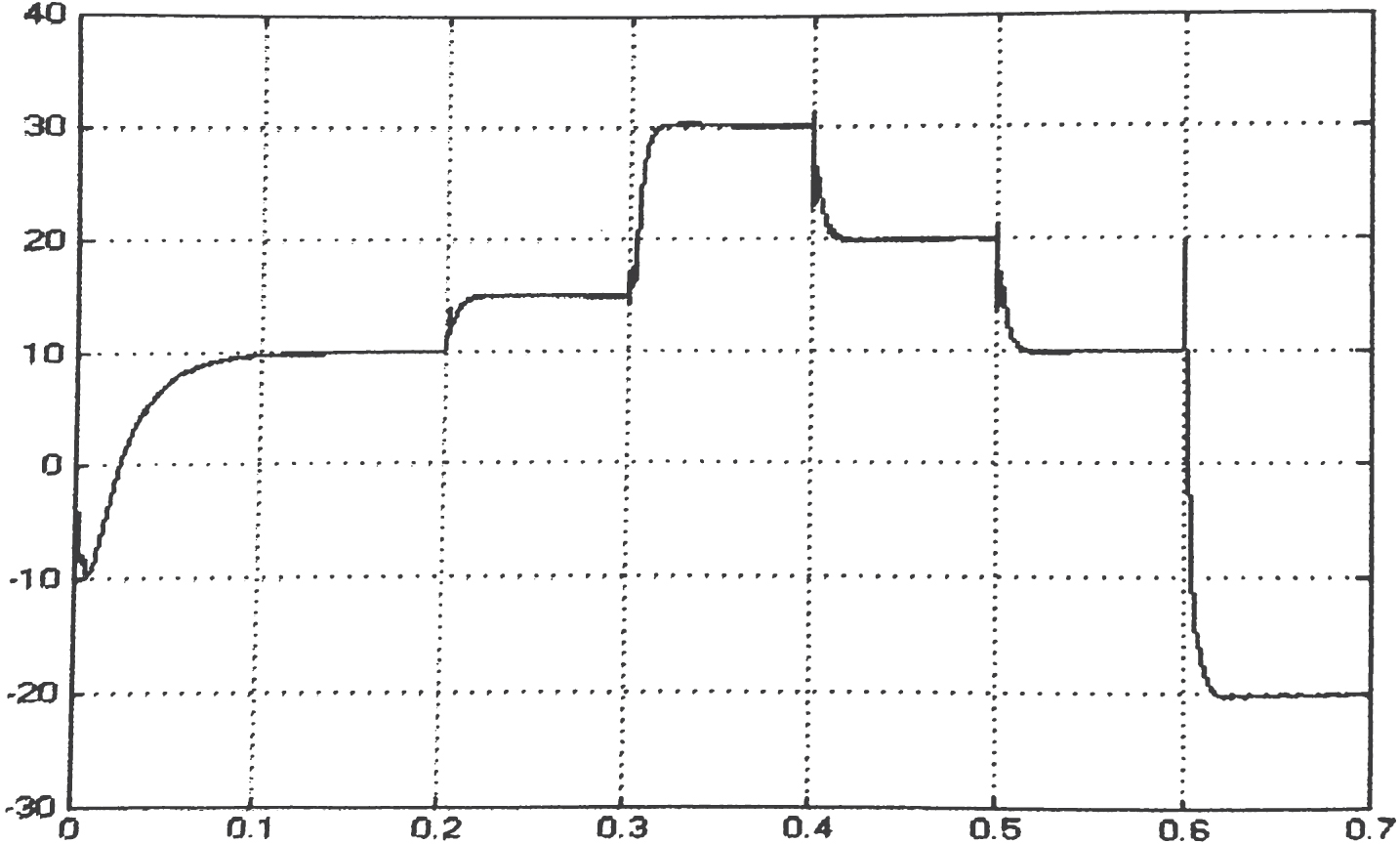
Figure 7 shows the measured speed, estimated speed by different estimators on the same plot for a comparison. Figure 8 shows speed error of different estimators under without machine parameter variation. In MRAS system estimated speed tries to follow the reference model speed, i.e., actual speed according to some adaptive law explained in the chapter. Hence, estimation depends on the parameters of PID controller used in the adaptive mechanism. ANN has learning capability and is proved quite beneficial for state estimation. It is shown from Figs. 7 and 8 that ANN estimator estimates speed very professionally. ANFIS is a grouping of ANN and Fuzzy logic. Fuzzy membership functions are updated by the hybrid learning algorithm. It is shown that ANFIS estimate is better than other adaptive speedestimators. Reference speed and estimated speed (MRAS, ANN, and ANFIS) on same plot. Speed error of different estimator under constant machine parameter.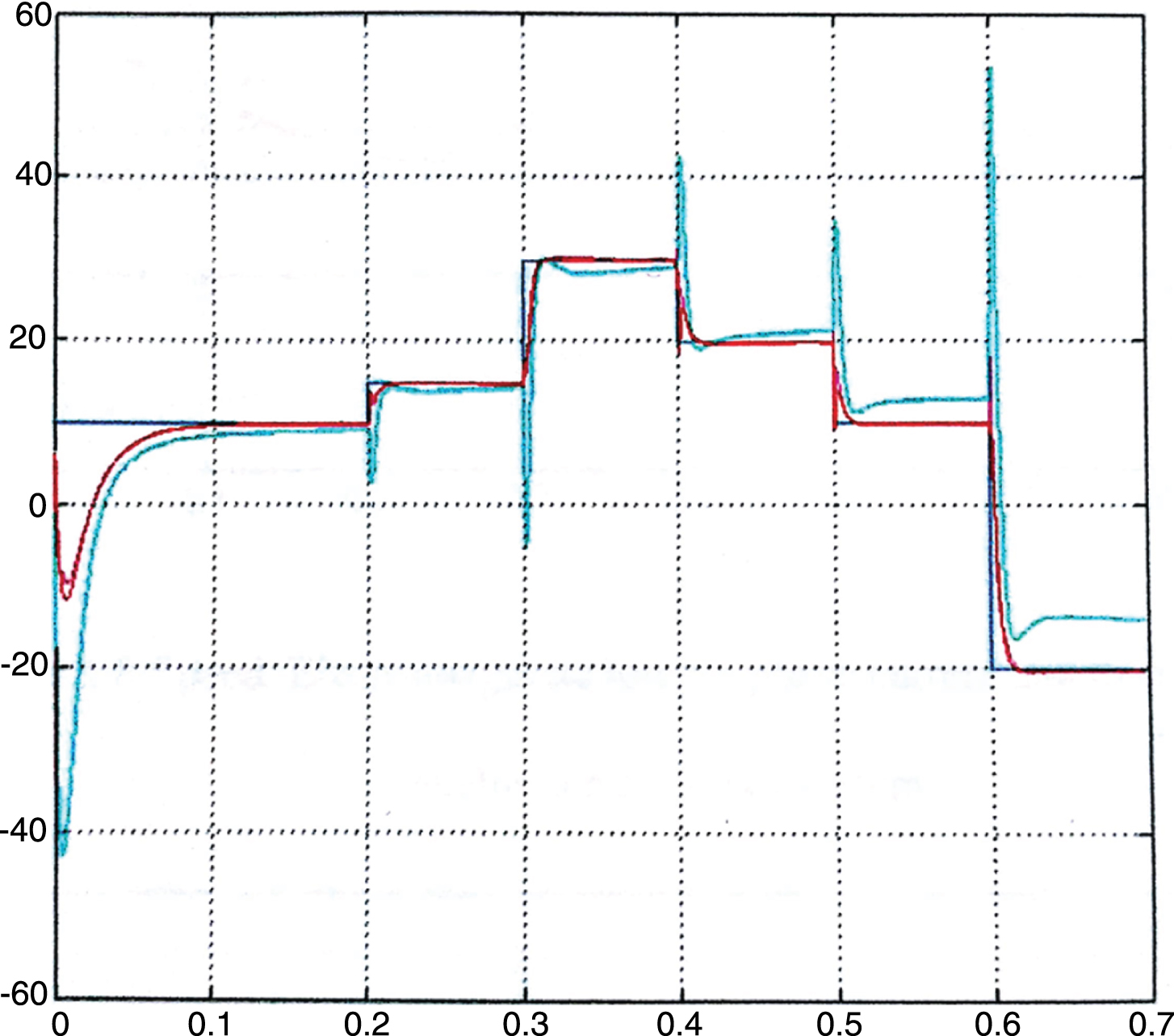

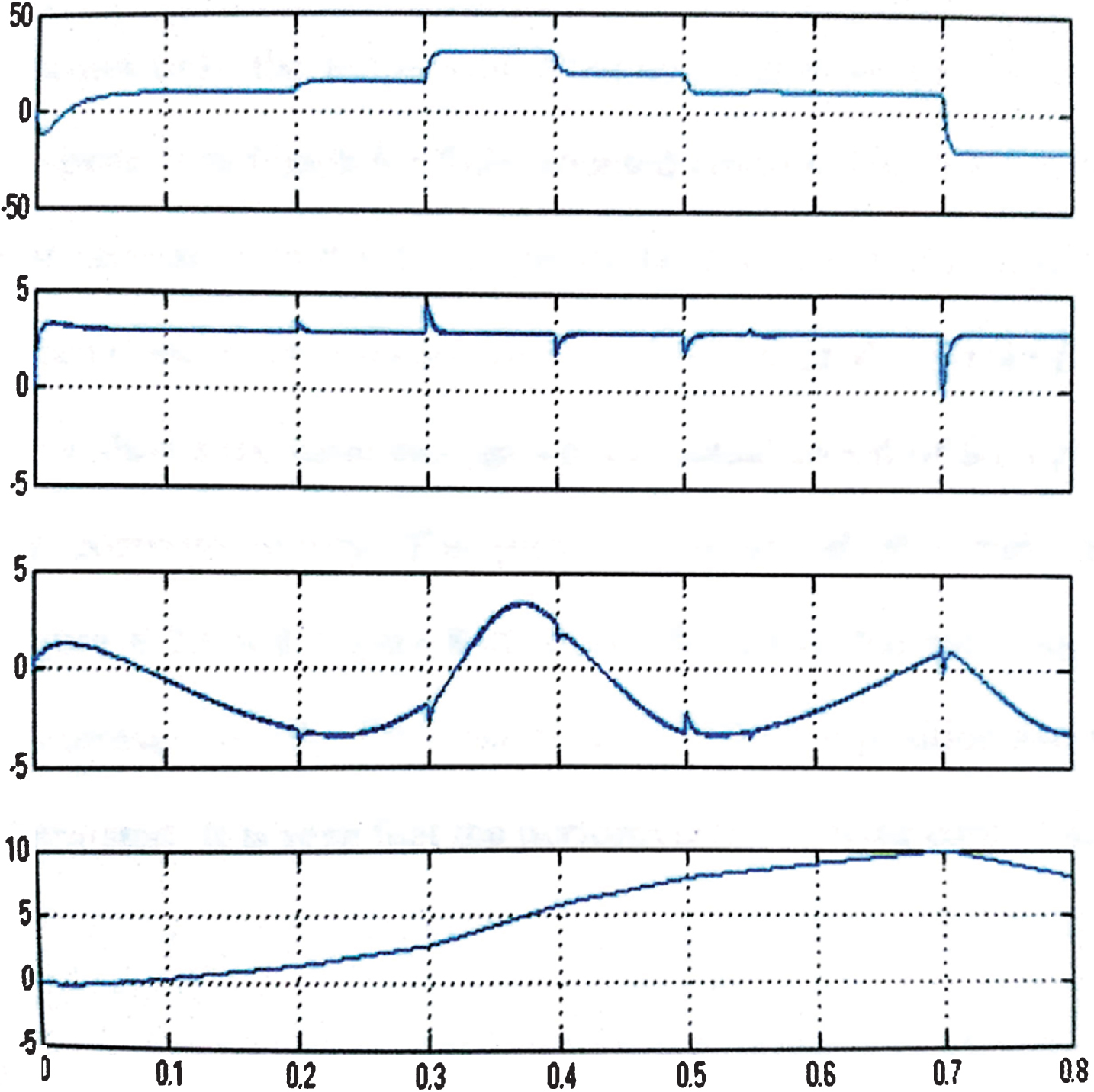
It is also clear that with the change in reference speed, the phase currents are having steep variations at all the points (Figure is not shown due to limitation of page). It is also recorded that at time t = 0.2, 0.3, 0.4, 0.5 and 0.6 seconds, the developed electromagnetic torque is in the shape of pulse because of step change in the reference speed and for other time instant it remains almost constant at 3 Nm. Referring to Fig. 11, the rotor position increases with time till t = 0.7 sec but starts decreasing after that due to negative speed.
Figure 9 shows the measured speed, estimated speed by different estimators with parameter variation on the same plot for a comparison. The pink color plot represents the estimated speed from MRAS estimator; Green color plot represents the estimated speed from ANN, red color plot represents the estimated speed from MRAS. Figure 10 shows speed error of different estimators under machine parameter variation. It is shown in Fig. 8 that ANN estimator estimates speed very effectively. Figures 9 and 10 directs that speed estimated by ANFIS is better than other adaptive speed estimators. Figure 11 shows the reference speed, the electromagnetic torque developed, phase a current and rotor position together. It is clear from the figure that the phase currents have steep changes at all the points where there is the variation in the reference speed. Due to the step change in reference speed at time t = 0.2, 0.3, 0.4, 0.5 and 0.6 seconds, the developed electromagnetic torque is in the shape of impulse and for remaining time instant it remains almost constant at 3 Nm. The position of rotor increases with time till t = 0.7 sec but starts decreasing afterwards due to negative speed. In this section, it is studied that how well the drive works when these estimators are used for field-oriented control of the drive. It is seen that the performance of vector control drive using ANFIS estimator is best under parameter change. Reference and estimated speed on the same axis. Speed error of different estimator under constant machine parameter. Speed, electromagnetic torque, phase current, and rotor position.

Comparison of ANFIS results with MRAS and ANN
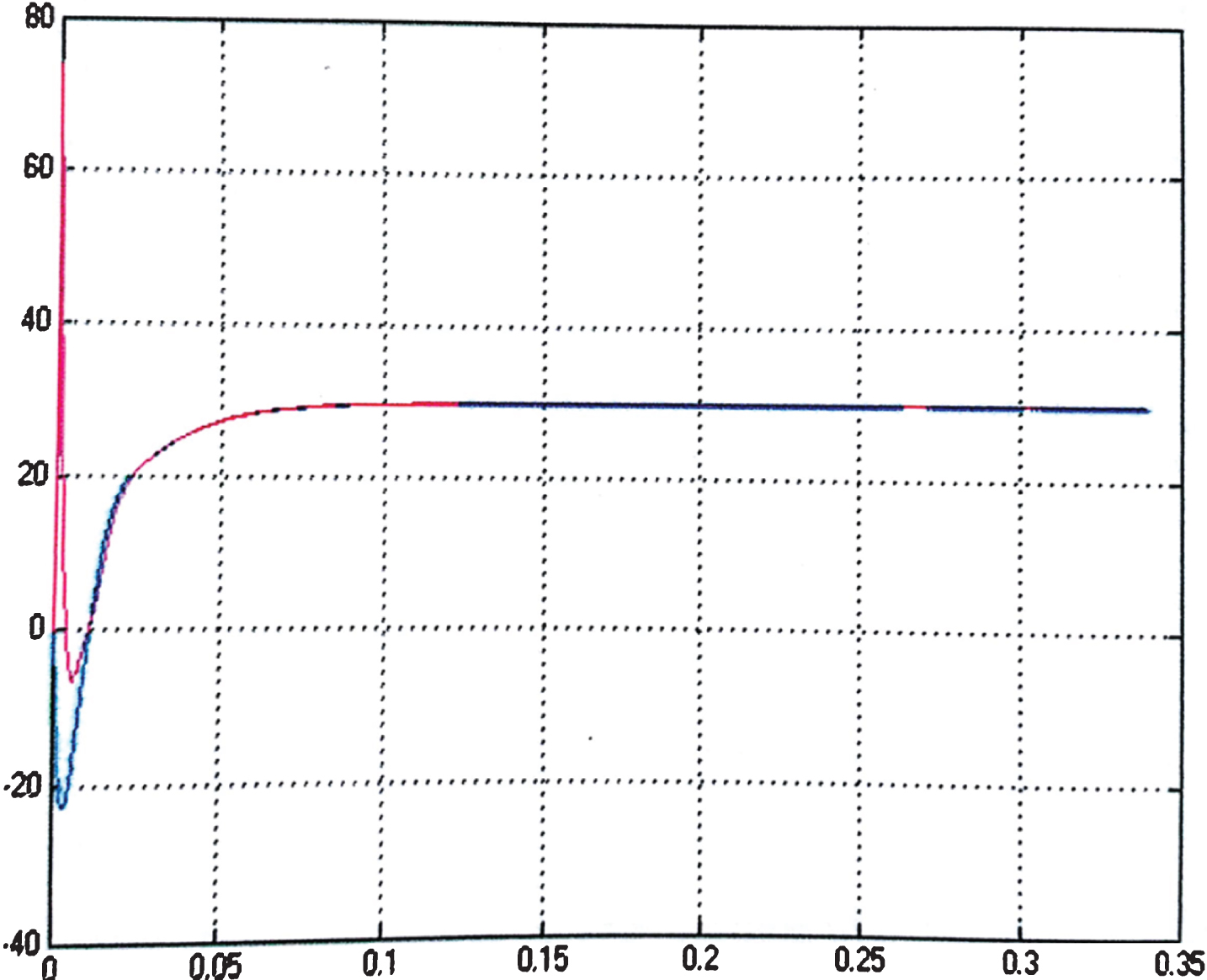
Figure 12 shows the speed measured by encoder. Figures 13, 14 and 15 shows the estimated speed by MRAS estimator, ANN estimator and ANFIS estimator. It can be concluded qualitatively from Figs. 13, 14, 15, 16 and 17 that ANFIS estimator give better results: speed estimated value is very close to measured followed by ANN. The combined properties of ANN (learning) and Fuzzy logic (reasoning) facilitate accurate estimation for ANFIS. Accurate quantitative analysis of performances of these estimators requires development of PMSM drive and is beyond the scope of this work as this work is limited to Simulation only. Intelligent estimators e.g. ANN, ANFIS estimators are suitable for the drives which are more vulnerable to system parameter change as these estimators adapt according to system parameter change. PMSM drive measured speed by encoder. Position sensor-less estimated sped through MRAS. Position sensor-less estimated speed through ANN. Position sensor-less estimated sped through ANFIS. Estimated rotor speed of ANN vs measured speed. Estimated rotor speed of ANFIS vs measured speed.


In the paper, a detailed model for a position sensor-less PMSM field oriented control (FOC) drive has been developed in MATLAB/Simulink. The developed model has been analyzed for a speed below the rated speed. Three different estimators viz. MRAS, ANN, and ANFIS are skilled and incorporated in the developed model of FOC PMSM drive. The simulation is done, results are compared, and performance of estimator is observed in two modes. In Mode 1 there is no any variation in PMSM parameters except load is applied at t = 0.001 second. In Mode 2, the load is inserted at t = 0.001 and L d is varied by 20% (0.8% L d ) at t = 0.35 seconds. Stator resistance is varied by 20% (0.8 R s ) at t = 0.55 seconds. It is concluded that ANN and ANFIS give good results compared to MRAS in both modes i.e. constant parameter variation and 20% parameter variations. Results are not satisfactory in case of rotor resistance (R s ) change. Moreover, the performance of ANFIS estimator is better compared to MRAS and ANN estimator.
Future work
As far as future work is concerned, a practical model of ANFIS speed estimator may be constructed and employed in sensor-less FOC drive. Comparative study of different position estimator regarding performance as well complexity and cost shall be required for design engineers and managers for the decision-making process. Other intelligent controller like genetic algorithm may be used to model and control the PMSM drive.