
Abstract
A two link planar rigid robotic manipulator is a highly nonlinear, coupled and multi-input multi-output system. For its effective control, an intelligent adaptive fractional order fuzzy sliding mode proportional integral and derivative controller (FOFSMCPID) has been presented in this work. Sliding mode controller (SMC) is designed by using exponential law and closed loop stability analysis is demonstrated by using Lyapunov theorem. The chattering in the SMC controller has been effectively reduced with the help of boundary layer along with the fuzzy logic. For tuning of the controller, a weighted sum of integral of absolute error and chatter has been considered as the objective function to be minimized using cuckoo search optimization algorithm. To demonstrate the efficacy of FOFSMCPID controller, the results have been compared with integer order fuzzy sliding mode proportional, integral and derivative controller (IOFSMCPID), integer order fuzzy sliding mode proportional and derivative controller (IOFSMCPD) and fractional order fuzzy sliding mode proportional and derivative (FOFSMCPD) controller for trajectory tracking, disturbance rejection, noise suppression and model uncertainties. The detailed presented investigations have demonstrated that FOFSMCPID controller exhibits much superior performance over IOFSMCPID, IOFSMCPD and FOFSMCPD controllers.
Keywords
Introduction
Robotic manipulators, a chain of combined links, were traditionally developed to replace human beings working in the hazardous areas like welding, assembling, manufacturing, painting etc. Pick and place has been one of the major applications of industrial robotic manipulators. Other applications of robotic manipulators are in the field of automobile industries, robotically assisted surgery, handling of radioactive and bio-hazardous materials etc. Being a complex, nonlinear, uncertain, coupled and multi-input multi-output (MIMO) system, efficient control of robotic manipulators has always been a challenge for control engineers [1]. Additionally, these systems are also subjected to varying parameters and initial conditions which further make control of these devices a tedious task [2].
Generally, linear conventional proportional integral and derivative (PID) controller was not recommended for the nonlinear systems [3]. Several nonlinear control algorithms such as sliding mode control (SMC), self-tuning regulator, model reference adaptive controller etc. were proposed in the literature for a nonlinear system. Among these nonlinear control techniques, SMC was quite popular among the researchers and scientists due to its robust behaviour [2, 4]. It is a special form of variable structure control where the fundamental design is based on the Lyapunov stability theory which guarantees the bounded input and bounded output (BIBO) stability.
As it is a high gain controller, the output of the system reaches the sliding surface very fast and tries to maintain its position on this surface [5]. Further, to enhance the capability of SMC, intelligent techniques such as fuzzy logic control (FLC), artificial neural network (ANN), neuro-fuzzy techniques were incorporated in its classical structure. Following are the detailed literature survey presented on the control of robotic manipulator system followed by problem formulation and contributions of the paper.
Literature survey
In this section, literature survey related to the control of nonlinear, complex and coupled systems using SMC and its variants has been presented. Survey is organised as follows: initially classical adaptive controllers were discussed followed by classical SMC controller. Further, classical SMC control method with intelligent control techniques such as FLC and ANN were discussed. Furthermore, the additions of fractional order operator with SMC and FLC technique have been presented.
Conventional PID controllers, though easy to design and implement, are not recommended for nonlinear systems [3]. Therefore, researchers have tried to find out alternative solutions such as adaptive control techniques namely gain scheduling, self-tuning regulator etc. However, the problem with gain scheduling is that it is designed for some fixed number of operating points and becomes cumbersome to find the optimized gains at each point if the number of operating points is large. On the other hand, application of the self-tuning mechanism requires the correct system model and therefore causes a challenge of exact parameter estimation which again is a tedious task [3, 6]. Apart from these control schemes, a variable order model based nonlinear control technique, SMC is used for last five decades to control nonlinear, and uncertain systems. It was extensively used for controlling nonlinear complex systems like two link manipulator system.
SMC, a conventional high gain robust nonlinear control scheme was evolved to cope up for nonlinear and uncertain systems but it causes high frequency oscillations in the controller output [5]. The fast oscillation is termed as chattering which is hazardous for final control element [7]. An excellent survey about various aspects of SMC has been presented in [8] wherein it has been concluded that though it is being explored for the past half century, but advancements in this field is still needed to find the solution of current day’s complex technical problems. SMC is also used in different areas like, hybrid synchronization of chaotic system [9, 10], control of Furuta pendulum [4] etc.
In the last decade, several good works on conventional SMC applied to a robotic manipulator have been reported [11–13]. As can be observed from these works, chattering has been the major issue of concern and various techniques have been proposed to reduce it. Out of these techniques, intelligent methods such as fuzzy logic and artificial neural network (ANN) have grabbed prime attention of researchers. A novel fuzzy SMC for robotic manipulator was proposed in [14] where boundary layer has been introduced rather than a signum function to reduce chattering. In this work, it was reported that by scheduling the width of boundary layer using fuzzy logic, chattering was reduced effectively and at the same time control accuracy was also maintained. Further, SMC technique combined with fuzzy logic scheme was proposed in [15] to control a class of MIMO nonlinear systems in presence of uncertainties and external disturbances. It has been justified in this work that after incorporating the fuzzy logic with SMC, robustness of the controller is enhanced. The uniqueness of the proposed method lies in the fact that there is no need to estimate the bounds of uncertainty and disturbances. Series of computer simulated results showed the efficacy of the proposed method. In [16], the use of fuzzy SMC with boundary layer was proposed to control a helicopter with two degrees of freedom (DOFs). A nonlinear MIMO model of the helicopter was considered for simulation study wherein fuzzy logic was used to reduce chattering by varying the gains of SMC controller in run-time. A comparative study was presented with the PID controller based on linear quadratic regulator and it was shown that fuzzy SMC was more capable of reducing variations in the controlled variables and manipulated signals. It was also claimed that the overshoot and steady state error in yaw angle were significantly decreased. In [17], a fuzzy SMC proportional integral and derivative controller (SMCPID) controller was presented for trajectory tracking task of two link manipulator system. The proposed controller inherited robustness of SMC as well as good response characteristics of PID. The presented simulation studies revealed that the fuzzy SMCPID controller provided improved performance than conventional SMC for trajectory tracking. Further, a fuzzy SMCPID controller was designed in [18] to control the depth of an autonomous underwater vehicle. Tuning of the parameters of sliding surface was done by fuzzy logic scheme by creating different rule bases for different parameters. Simulated results were presented and a quantitative comparison with traditional SMCPID controller was made. It was demonstrated that the proposed control law improves the tracking performance and also reduces the chattering particularly in case of external disturbances and parametric uncertainties. Recently, successful use of sliding mode with fuzzy logic controller was used to control Optimal Energy Management in PMSG Wind Turbine with Battery Storage, which was presented in [19].
Based on the literature survey conducted above, it can be inferred that the addition of fuzzy logic with SMC improves the performance of the controller for tracking and coping up with parameter uncertainties. However, other intelligent techniques like ANN and combination of fuzzy logic with ANN have also been explored to enhance the capability of SMC in terms of robustness and elimination of chattering. Some interesting instances of the application of ANN and ANN with fuzzy logic are as follows. A fuzzy neural SMC is presented in [20] for trajectory tracking control of a multi-link robot with model error and uncertain disturbances. In this scheme, fuzzy neural network (FNN) is employed to reduce chattering of SMC which enforced the sliding mode motion to learn the uncertain disturbances. Genetic algorithm (GA) has been used to optimise the initial parameters of FNN. The control laws are calculated by Lyapunov method which ensures stability and simulation results verify the validity of proposed control technique for trajectory tracking. Also, a FNN inherited SMC scheme has been proposed in [21] to control n-link robotic manipulator. The proposed approach has been claimed to be effective for chattering control with reduced system details. In this structure, the FNN framework is designed to mimic the SMC law. Lyapunov stability theorem has been used to design control law for asymptotic stability of the controlled system as well as for network convergence. Numerical simulations and experimental studies on a two link robotic manipulator actuated by DC servo motors are presented to justify the claims in the paper. The superiority of the proposed scheme over various reported intelligent techniques such as fuzzy model based control, robust neural fuzzy network control, Takagi-Sugeno-Kang type fuzzy-neural network control (FNNC), indirect adaptive FNNC and direct adaptive FNNC, has been evaluated in terms of normalized mean square error. A neural network based terminal SMC scheme has been suggested in [22] to control robotic manipulator with actuator dynamics. In this scheme, a radial basis function neural network is considered to approximate the nonlinear model of robotic manipulator. Also, a robust control term is added to reduce the modelling error of system and estimate the error of the neural network. Lyapunov theory has been used to ensure the guaranteed stability of the closed loop system. Experimental results confirmed the effectiveness of the proposed controller by comparing with linear SMC and conventional PD controller in terms of various performance indices such as L2 norm of error, maximum control effort and L2 norm of control effort.
Control engineers always strive for robustness in the control schemes. Fractional order calculus for controller design has recently proved its ability to further enhance the robustness of the controllers. Some recent research works regarding the use of fractional order control are shown in [23] and its combination with SMC has been presented in [24–27]. Fractional order SMCPD and SMCPID controllers were proposed to control a nonlinear coupled tank-level system in [28]. The results have been compared with integer order SMCPD and SMCPID controllers in terms of integral of square error and it was found that the proposed fractional order controllers were more robust and provided improved tracking and disturbance rejection performances. In [25], a combination of fractional calculus with terminal SMC was proposed for a class of dynamical uncertain processes. Corresponding control law was formulated and tested by applying Lyapunov stability theory to ensure the finite time stability of the closed loop system. Simulation results illustrated the effectiveness of the proposed control method on magnetic bearing system and chaotic gyro system. The performance of fractional order terminal SMC was compared with its integer order counterpart and it was claimed that former provided a superior performance. Further, to synchronize two fractional order chaotic systems completely, SMC with guaranteed asymptotical stability technique has been successfully applied in [27]. The procedure has been tested successfully to synchronize the chaotic systems which showed two, three or four scrolls often found in mechatronics and power electronics systems. Simulated results showed the effectiveness of proposed control laws even in the presence of noisy environment.
Though the inclusion of fractional order calculus in variable structure control techniques may improve the overall robustness and performance of controllers, this can be further enhanced by the simultaneous application of intelligent techniques. This has been the recent trend and few works have been reported which implement fractional order SMC controller with fuzzy logic. A nice illustration of this approach is presented by [29] wherein a novel parameter adjustment scheme was designed to improve the robustness of fuzzy SMC by the use of adaptive neuro-fuzzy inference system (ANFIS). In the proposed scheme, fractional order integration has been used in place of integer order to obtain more robust behaviour of the controller. The designed controller has been tested on two DOF direct-drive robot arm and has been compared with its classical integer order counterpart. Simulation studies revealed that the proposed technique displayed better tracking performance, insensitivity towards disturbances and a high degree of robustness. In [28], a novel fractional order fuzzy SMC with proportional and derivative surface (FOFSMCPD) was proposed for polar robot and coupled tank systems. The application of fuzzy logic in this work was focused on reducing discontinuity in the signum function when the controller reaches to sliding surface. The parameters of proposed control scheme were optimised using GA. Extensive simulation studies were carried out and a comparative study was presented on the basis of reaching time as well as on root mean square value of tracking error. It was claimed that the FOFSMCPD controller was able to provide better tracking capability along with reduced chattering under uncertain parameter scenarios than its integer order counterpart. It may be noted that in both of these recent works, fuzzy SMC with fractional order PD surface has been used to effectively control complex systems. This approach has resulted in reduced chattering due to run time variation of the gains associated with exponential reaching law by using fuzzy logic and has thereby enhanced the performance of overall system. It may be noted that a fractional order PID sliding surface offers more DOF to the user in contrast to the fractional order PD surface. This very fact has motivated to the authors to explore the application of fractional order PID sliding surface for fuzzy SMC. The developed controller using these combinations is termed as fractional order fuzzy sliding mode proportional integral and derivative controller(FOFSMCPID). Here, fuzzy logic is used to vary the gains associated with reaching law in run-time to reduce the chattering which signifies the adaptive behaviour of the proposed controller whereas fractional order is used to increase the robustness of proposed controller.
Another important aspect is the tuning of controllers for robotic manipulator. As can be inferred from the above survey, various optimization methods have been used. The recently developed cuckoo search algorithm (CSA) has been claimed to be far superior to its counterpart for complex multi-model optimization problems [30–32]. Therefore CSA has been used to tune the controller gains in this work. The contributions of the present work are many and can be summarised as follows: A robust controller, FOFSMCPID is proposed and successfully tested for effective control of a two link planar rigid robotic manipulator for trajectory tracking, disturbance rejection, noise suppression and model uncertainties. Parameters of the exponential reaching law are varied at run-time using FLC which has resulted significant reduction in chattering. A comparative study of FOFSMCPID with IOFSMCPID, IOFSMCPD and FOFSMCPD controllers demonstrated the superiority of FOFSMCPID controller.
Further, this paper is organized as follows. Followed by introduction and detailed literature survey presented in Section-1 and Section-2, respectively, the dynamic mathematical model of the plant is described in Section-3. A brief description of fractional order implementation method is presented in Section-4. The designs of IOFSMCPID, IOFSMCPD, FOFSMCPID and FOFSMCPD controllers are presented in Section-5. Thereafter, CSA algorithm is described in Section-6 wherein the tuned gains and the resulting trajectory tracking performance are presented. A complete performance assessment of all the investigated controllers including disturbance rejection, noise suppression and uncertainty analysis are elaborated in Section-7. Finally the paper is concluded in Section-8.
Dynamic model of two link planar rigid robotic manipulator
The mathematical model of two link planar rigid robotic manipulator is described in this section.Mathematical model has been taken from [1] and shown in Fig. 1. In the diagram, l1 and l2 have been considered as the lengths of link-1 and link-2, respectively, and m1 and m2 have been taken as the masses of link-1 and link-2, respectively. Before finding the mathematical model of the manipulator, it was assumed that masses of both links are concentrated at the end effector of the respective links. θ1 and θ2 are angular positions of links in radian when torques τ1 and τ2 are applied to the respective links.
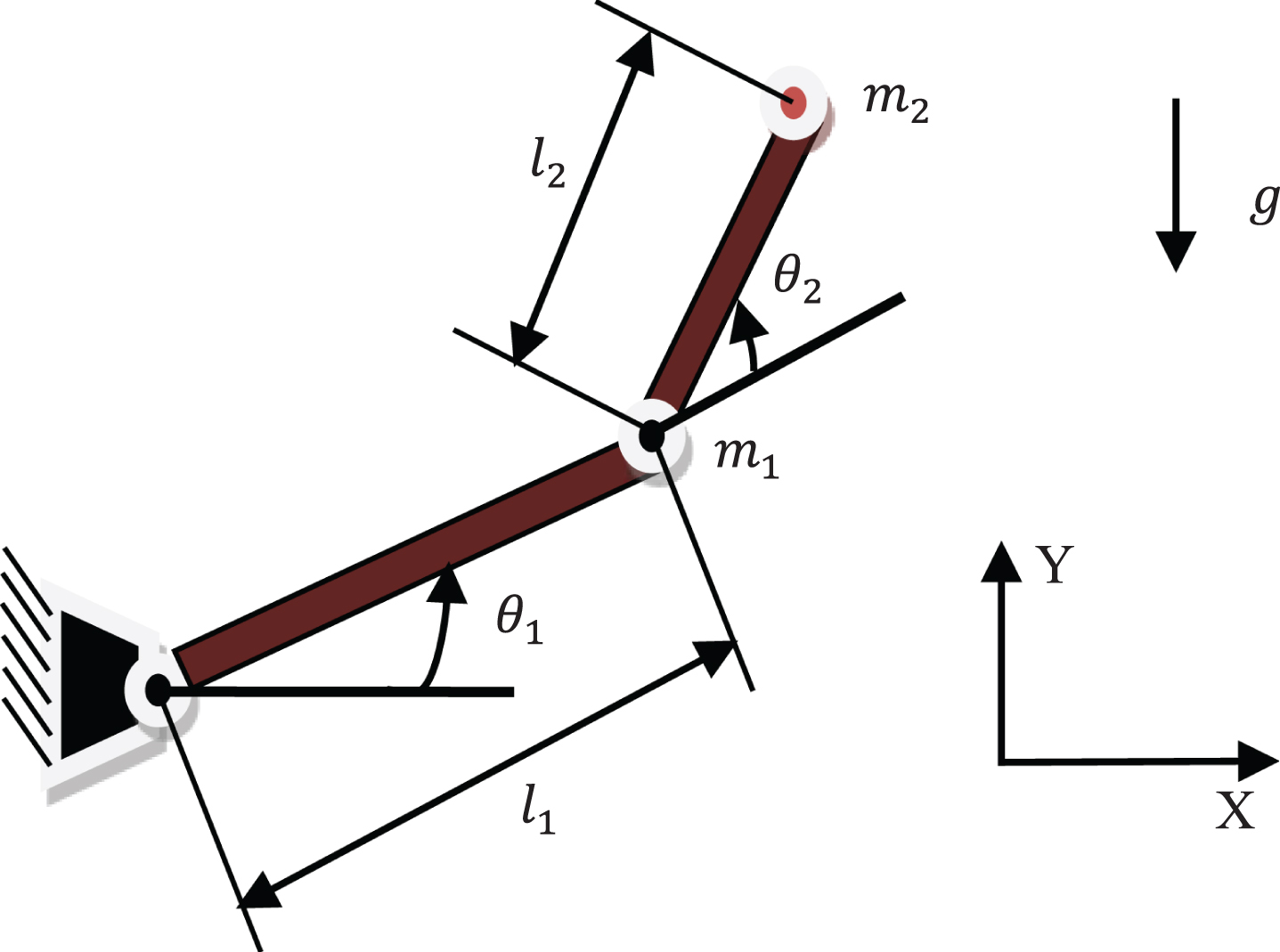
Two link planar rigid robotic manipulator.
The dynamic equation of a manipulator can be written as:
Using Euler-Lagrange equation
The dynamic equations below show the relation between controllers output (Torque) and linkposition.
The parameters for the manipulator model as described in Table 1 as:
Parameters for a two link robotic manipulator
Incorporation of fractional order mathematical operators increase the DOF and as a result precise solutions are obtained which have been used in the field of control in several applications [30, 33–35]. A fractional order differentiator and integrator of a function g (t) is represented as, D α g (t) and D−βg (t) respectively where 0 < α < 1 and 0 < β < 1. The mathematical definition of fractional order differentiation and integration has been approximated by several approaches, given by different mathematicians. In the present work, Grünwald -Letnikov (GL) method (7) has been used to implement the fractional order operators with a memory size of 100. It may be noted that GL definition is readily implementable on computing platforms as it can be reduced to a difference equation.
In this section, the design methodology of IOFSMCPID, IOFSMCPD, FOFSMCPID and FOFSMCPD controllers are presented. Since the considered manipulator has two links, it requires two feedback control loops, one for each link. Main objective of the control scheme is to achieve good tracking performance of the end-effector while guaranteeing the stability. SMC is a model based control system in which the design of controller output is different for different systems. The design strategy is based on Lyapunov stability theory which assures the stability of the system. It is a type of robust controller that allows coping up uncertainties in plant model without degradation of performance. On the other hand, SMC suffers a serious issue called chattering. As a result of chattering, the controller output oscillates in the full range of saturation which may cause wear and tear of final control element. Generally integer order proportional and derivative (PD) type of surface has been used to design a classical SMC. Later, integral (I) action is also augmented in the sliding surface which has been claimed to improve the system performance. In the present work, a combination of fractional order calculus and fuzzy logic scheme with PID sliding surface has been proposed to cope with chattering phenomena of classical SMC technique while adding additional robustness to the controller. Following are the designs of the proposed controllers organised as follows. Initially the generic design of IOFSMCPID has been described followed by its modifications yielding different configuration of controllers. The IOFSMCPD is obtained byeliminating the integral part in the sliding surface. The remaining two i.e. FOFSMCPID and FOFSMCPD are obtained by replacing the integer order integrator and differentiator in the sliding surface by their corresponding fractional order.
IOFSMCPID controller design
In this section, IOFSMCPID control structure with respect to torque is presented. For an n
th
order system a PID sliding surface, s can be defined as:
Here, λ is a constant, k
i
is the gain for integral term of surface s and error e = θ
r
- θ, where θ
r
is the desired angular position and θ is the current angular position of end points of the links in radian. For the considered plant of second order (n = 2), Equation (8) becomes,
On differentiation,
Putting
The system output is forced to track this surface with the help of a reaching law. The reaching law is to be designed in such a way that it guarantees the stability of the closed loop system. Generally, three reaching laws are widely used and have been reported in the literature. These are exponential, constant rate and power rate laws [7]. In the present work, exponential law as given in Equation (12) is utilised.
where ε and k are constants.
As SMC is a high gain switching controller, chattering occurs at the controller output due to the discontinuity in sgn function in control action. To resolve this problem, saturation function Equation (13) is employed rather than sgn function [20].
where Δ (0 < Δ < 1) forms the boundary layer and its value is obtained by CSA algorithm.
Now, Equation (12) becomes,
Equating Equation (11) and Equation (14),
Now substituting
This can also be expressed as,
Equation (17) gives the required torques as an IOSMCPID controller outputs to control the angular positions of end-effector of manipulator. In this design, ε and k are the two positive gains of exponential law. It may be noted that these gains help to guide the manipulator output so as to track the surface whereas the saturation function reduces the chattering. Therefore, proper variation of the values of ε and k can make a satisfactory compromise between robustness and chattering reduction. It has been reported in [28] that an FLC can be easily combined with SMC so as to preserve the advantages of both these approaches. Constant rate law was used to design the fuzzy SMC controller in [28] where only one gain was varied in run-time with sliding surface. In the present work, FLC is used to vary the gains ε and k in run-time with varying the sliding surface. This has led to significant reduction in chattering which will be demonstrated later in Section-6 and Section-7. Detailed design of FLC is presented below followed by the IOFSMCPD design.
As mentioned above, in the present work, FLC and SMC are combined to take the advantage of both. Parameters of utilized exponential law i.e. of ε and k have been obtained with the help of FLC in run-time. A single-input single-output FLC has been used where the sliding surface is used as input. The used seven triangular input membership functions (MFs), as shown in Fig. 2, are NB (negative big), NM (negative medium), NS (negative small), Z (zero), PS (positive small), PM (positive medium) and PB (positive big). Four output MFs namely, VS (very small), S (small), M (medium) and B (big), have been used out of which two are triangular while remaining two are trapezoidal, as shown in Fig. 3. It may be noted that two trapezoidal MFs are considered in the left most and right most side of output MFs to take care of the generation of minimum and maximum output respectively [36]. In a general form, the fuzzy rule can be stated as
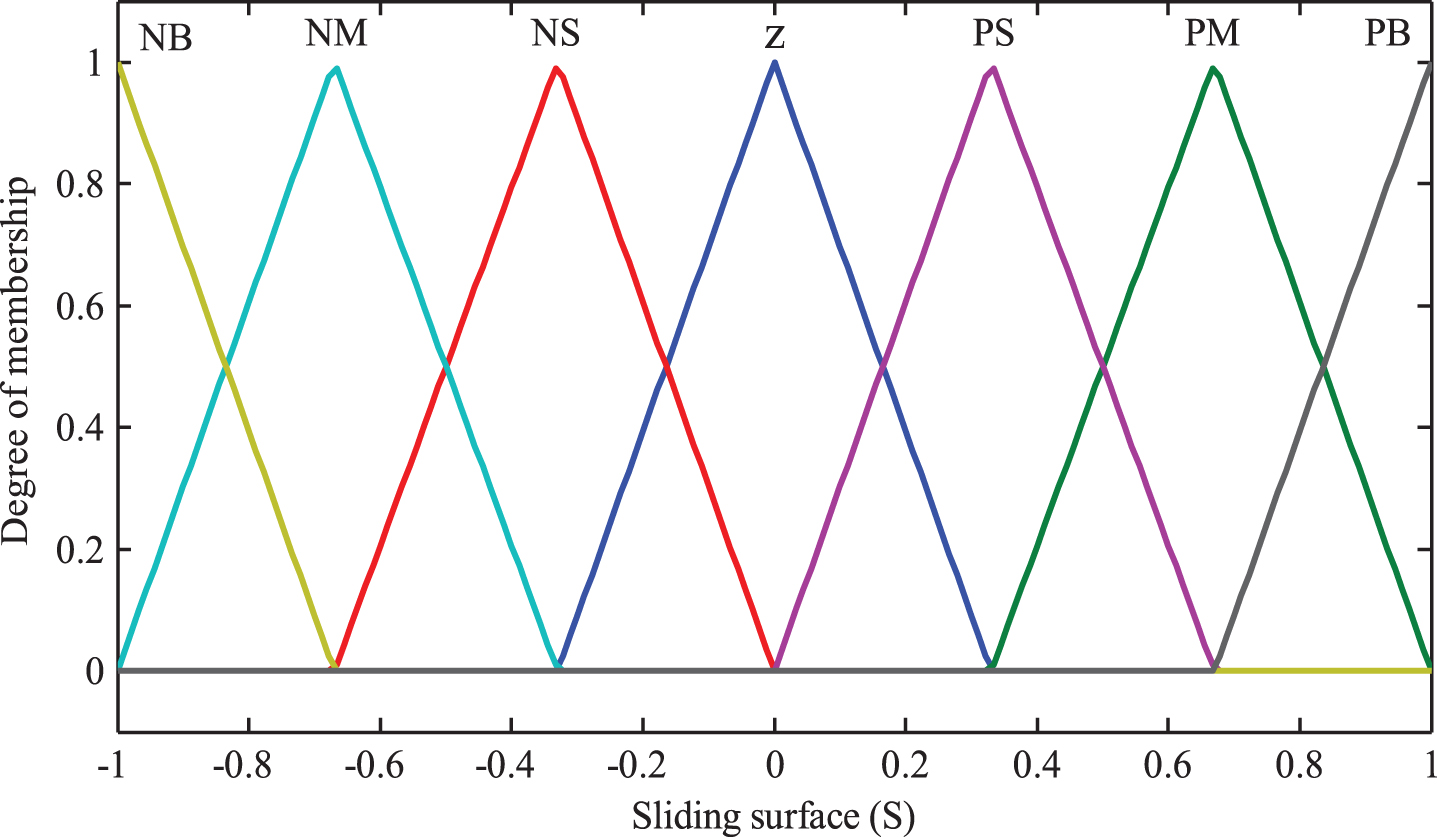
Input membership functions of FLC.

Output membership functions of FLC.
Ri: If s is S i then o is O i
where, ε and k is defined as ε = O i * g ε and k = O i * g k . Here O i is considered as the output of FLC whereas parameters g ε and g k are two different output gains of FLC to be obtained from CSA. Due to different values of gains g ε and g k , ε and k delivers different values in run-time. Table 2 presents the utilized rule base which has been considered from [28]. The design of rule base signifies that if the value of sliding surface tends to zero, ε and k should be minimum whereas if the value of sliding surface tends to –1 or 1, ε and k should be maximum. Mamdani type min-max inference and the centre of gravity defuzzification method have been used in the present work. The resulting control action, a V-shape input-output profile is shown in Fig. 4 which implies the rule base design. It can also be seen that for any value ofsliding surface, the output of FLC is positive as expected because ε and k should be positive as required by the exponential law. The variation in the values of ε and k in runtime by using FLC to reduce the chattering clearly indicates the adaptive behaviour of proposed controller.
Input-output rule base for FLC

Input-output surface plot of FLC.
IOFSMCPD controller is designed after considering a sliding surface s for nth order system is as,
For the considered plant of second order (n = 2), Equation (18) becomes,
After comparing the PD sliding surface Equation (19) with exponential law Equation (14), and putting the value of
Equation (20) estimates the required control action of IOSMCPD controller for the desired trajectory tracking.
IOFSMCPD controller has been designed from IOSMCPD control scheme after varying theexponential law parameters ε and k with the help of FLC similarly as explained in the design of IOFSMCPID controller to minimize the chattering.
A fractional order PID sliding surface for a 2nd order system is defined in Equation (21) [27, 28]
On differentiation,
Putting
The system output can be forced to follow this surface with the help of an exponential reaching law as defined in Equation (14). In line with the IOFSMCPID controller, saturation function Equation (13) is also employed rather than sgn function [7] to reduce the chattering phenomena.
Comparing Equation (24) to modified exponential law Equation (14),
Putting the value of
Further, Equation (26) can be expressed as;
Optimized gain parameters of FOFSMCPID and FOFSMCPD controller
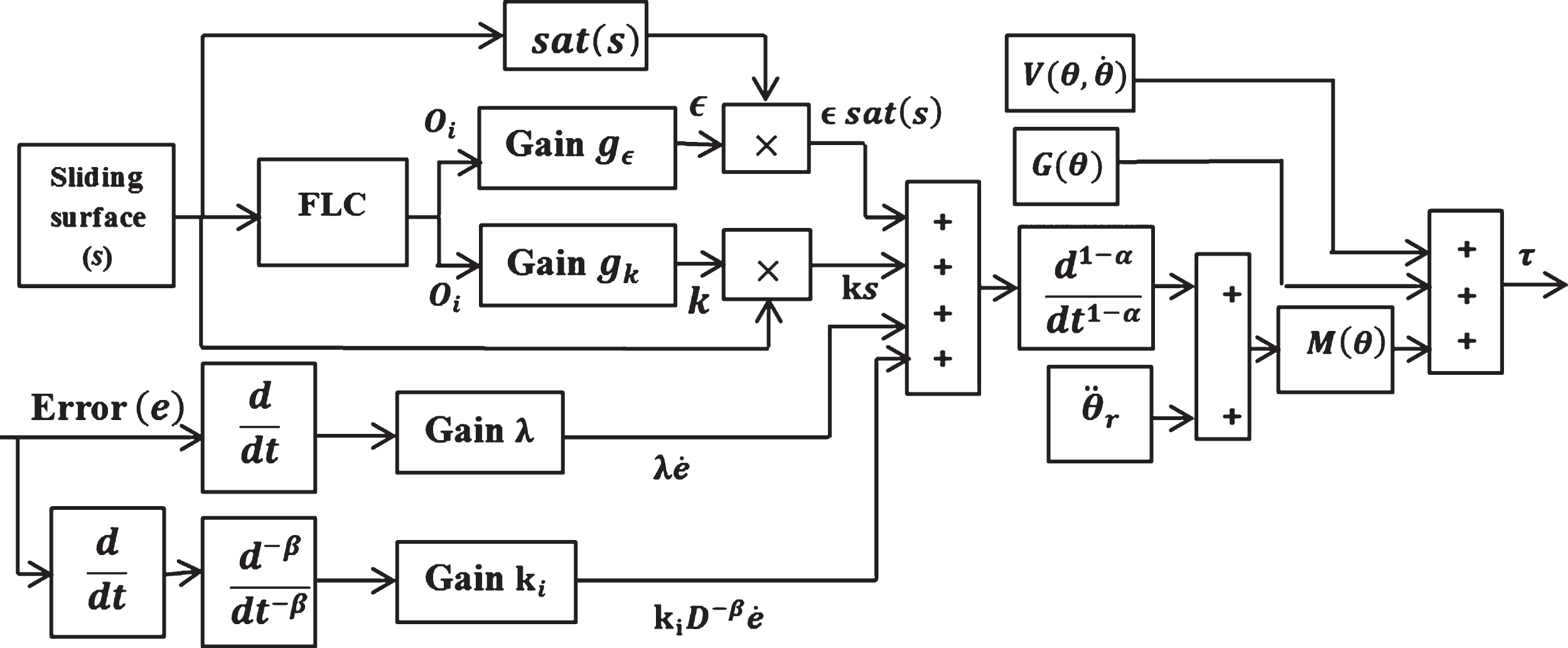
Block diagram of FOFSMCPID controller.
Equation (28) gives the required torque as a FOSMCPID controller output to control the manipulator. Further, FOFSMCPID controller is designed by clubbing the FLC to FOSMCPID controller in order to avoid the high frequency oscillations from the controller output, as explained earlier in Sections 5.1 and 5.2. The optimised value of α and β are obtained by CSA algorithm which is shown in Table 3. A block diagram implementation of the FOFSMCPID controller is shown in Fig. 5, where error and rate of change of error has been considered as input while output of the controller with respect to torque τ is presented.
FOSMCPD controller can be obtained from the above FOSMCPID controller design as give in Equation (28) by letting the gain of integral term k i as zero which is given as follows.
Equation (29) estimates the required control action of FOSMCPD controller for the desired trajectory tracking.
To design the FOFSMCPD controller from FOSMCPD control scheme, FLC is incorporated likewise as explained in Section 5.2 to minimize the oscillations in the controller output.
The main objective of a control scheme is that the plant output must be bounded for bounded input. In the present work, Lyapunov stability theorem has been considered to design the sliding mode controller.
By choosing the Lyapunov function as:
Substituting
Let, sat (s) = ∂, where, ∂>0.
From Equation (32)
Equation (34) shows that
Let sat (s) = - ∂, where, ∂>0.
From Equation (32)
Let, φ = - s such that φ > 0
On the basis of results obtained from Equation (34) and Equation (36), it can be easily inferred that above design follows Lyapunov stability theory and the plant output will be bounded for boundedinput.
Tuning of controller plays a vital role in getting the desired performance. Since there is no well-defined method for tuning the gains of nonlinear as well as intelligent controllers, CSA based optimization technique is used in the present work.
CSA description
CSA is a meta-heuristic bio-inspired optimization algorithm given in [31, 32]. It has been reported that this algorithm has very strong capability to solve multimodal problems effectively and also having the strong searching capability compared to other popular bio-inspired algorithms. The bird cuckoo has pleasing sound and magnificent reproduction strategies. The eggs laid by her are in the nest of other bird’s nest which is random. The CSA is based on the breeding behaviour of cuckoo and it combines the concept of Levy flight obtained by Magnegna’s algorithm to generate new eggs. The balance between two components namely diversification and intensification is what the cuckoo search algorithm provides and that makes it superior over the existing popular algorithms. The use of Levy flight in CSA with proper step size ensures best solution in the given search space. One of the best features of CSA is that its convergence rate does not depend on number of parameters to be optimized. It has also been claimed to be superior for multi-objective function optimization. The best solution is always retained in the search space by using elitism property. Basic rules proposed in [31, 32] for the best optimizations by CSA are asfollows: Each Cuckoo lays one egg i.e. one solution at a time and dumps it in a random nest. The best nest i.e. the nest which contains the highest quality eggs goes to next generation and other nests are discarded. The available host nests are fixed and host can find the alien with a probability p
a
ε [0, 1]. If the host can search and find out alien egg then it can either destroy or discard the nest so as to make an entirely new nest in a new place.
Controller tuning for trajectory tracking
All the presented simulations have been done in MATLAB/SIMULINK (R2012a) on a personal computer having Intel coreTM i5 processor working at 3.33 GHz, 4 GB RAM with a 32-bit operating system. Fourth order Runge-Kutta method was used as the ODE solver working at 1 ms sampling time. It may be also noted that optimized gains remained unaltered throughout all the further studies. The torque limitations for both links have been taken as [–20, 20] N-m. The desired trajectories (θr1 and θr2) for link-1 and link-2 have been given in Equation (37) and Equation (38), respectively as follows,
The chatter is defined as integration of sum of absolute values of surfaces for link-1 and link-2, respectively as described in Equation (39) where s1 and s2 represents the surface of link-1 and link-2, respectively. In the present work, the objective function (OBF) has been taken as the weighted sum of integral of absolute error (IAE) and the chatter which is defined in Equation (40).
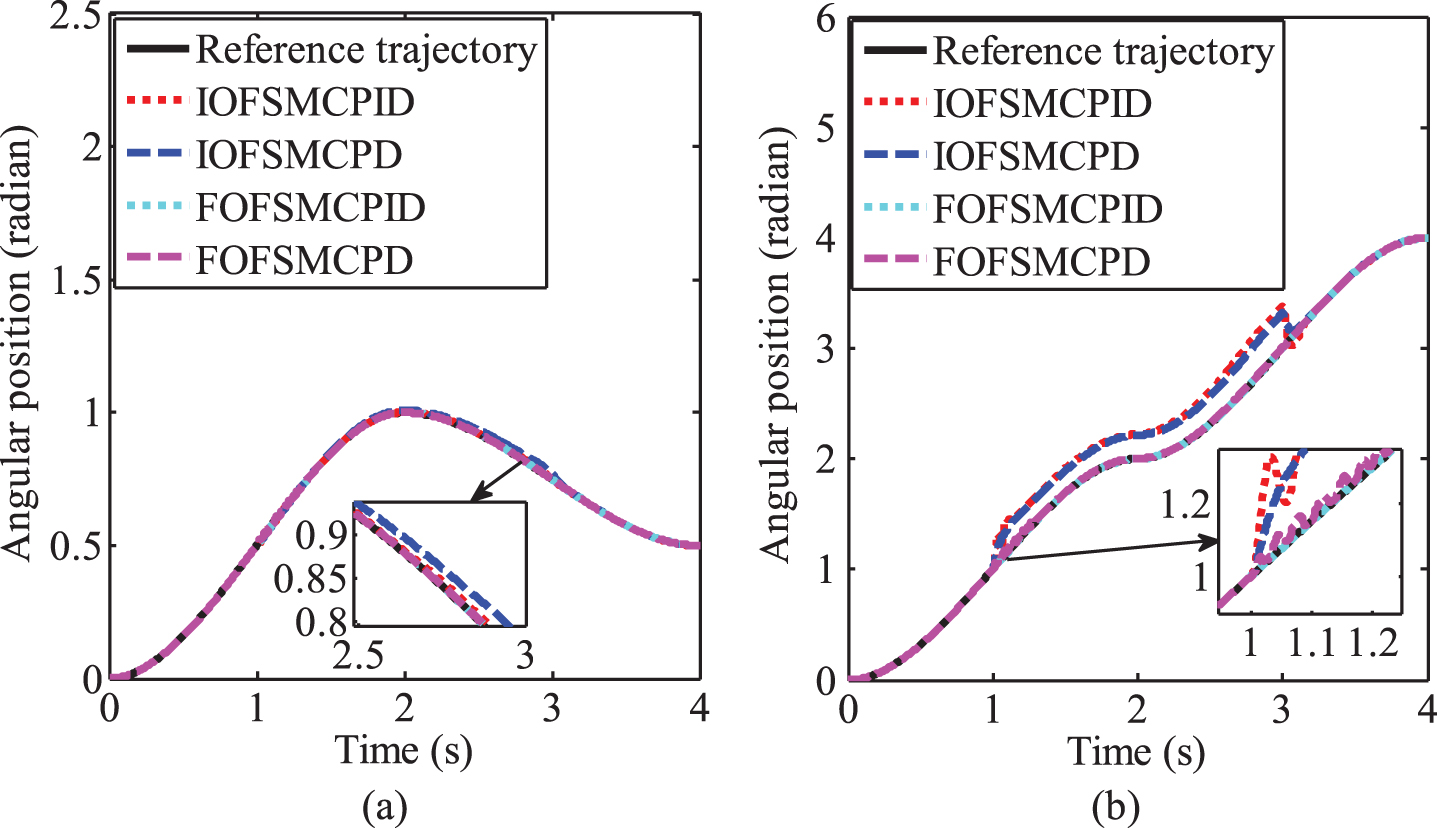
The aggregate IAE is defined as the sum of the IAE values of both the links i.e.IAE = IAE1 + IAE2. The weightage parameters w1 and w2 are chosen as 0.999 and 0.001. These numbers were chosen to give equal weightage to both the terms, IAE and chatter, during the optimization. Table 3 shows the optimized gains of the IOFSMCPID, IOFSMCPD, FOFSMCPID and FOFSMCPD controllers. OBF v/s iteration curves have been depicted in Fig. 6 where it can be clearly seen that the convergence rate of FOFSMCPID is best among the four investigated controllers. The values of OBF were obtained as 1.3242E-06, 1.4034E-05, 9.7396E-07 and 1.1185E-06 for IOFSMCPID, IOFSMCPD, FOFSMCPID and FOFSMCPD controllers, respectively. Table 4 presents the obtained values of the OBFs along with the IAE values of each link for all four controllers. Figures 7 and 8 show the performance for all the controllers in terms of trajectory tracking curves and respective controller outputs. In the controller output curve, a spike can be observed at t = 2s because both the desired trajectories are the summation of two small trajectories which can be seen from Equations (37) and (38). Also at t = 2s, curves show the point of inflection in both the links. These spikes are not observed in the trajectory tracking curve, Fig. 10 which shows the robust behaviour of proposed controller. Superiority of FOFSMCPID controller can be observed in all the investigations.
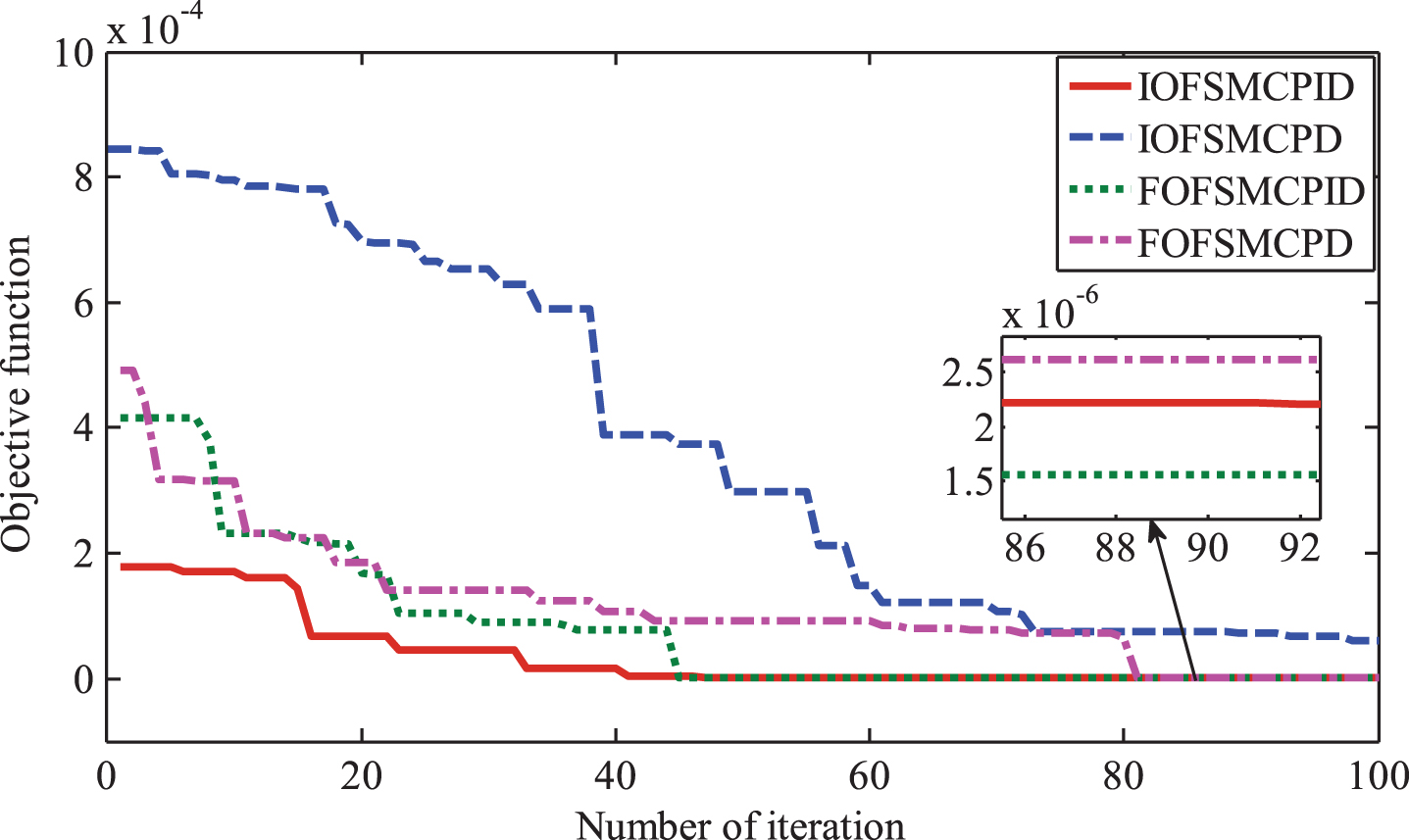
OBF vs. iteration curve for IOFSMCPID, IOFSMCPD, FOFSMCPID and FOFSMCPD controllers.
IAE for two links and OBF for trajectory tracking

Trajectory tracking curves: (a) link-1 (b) link-2.
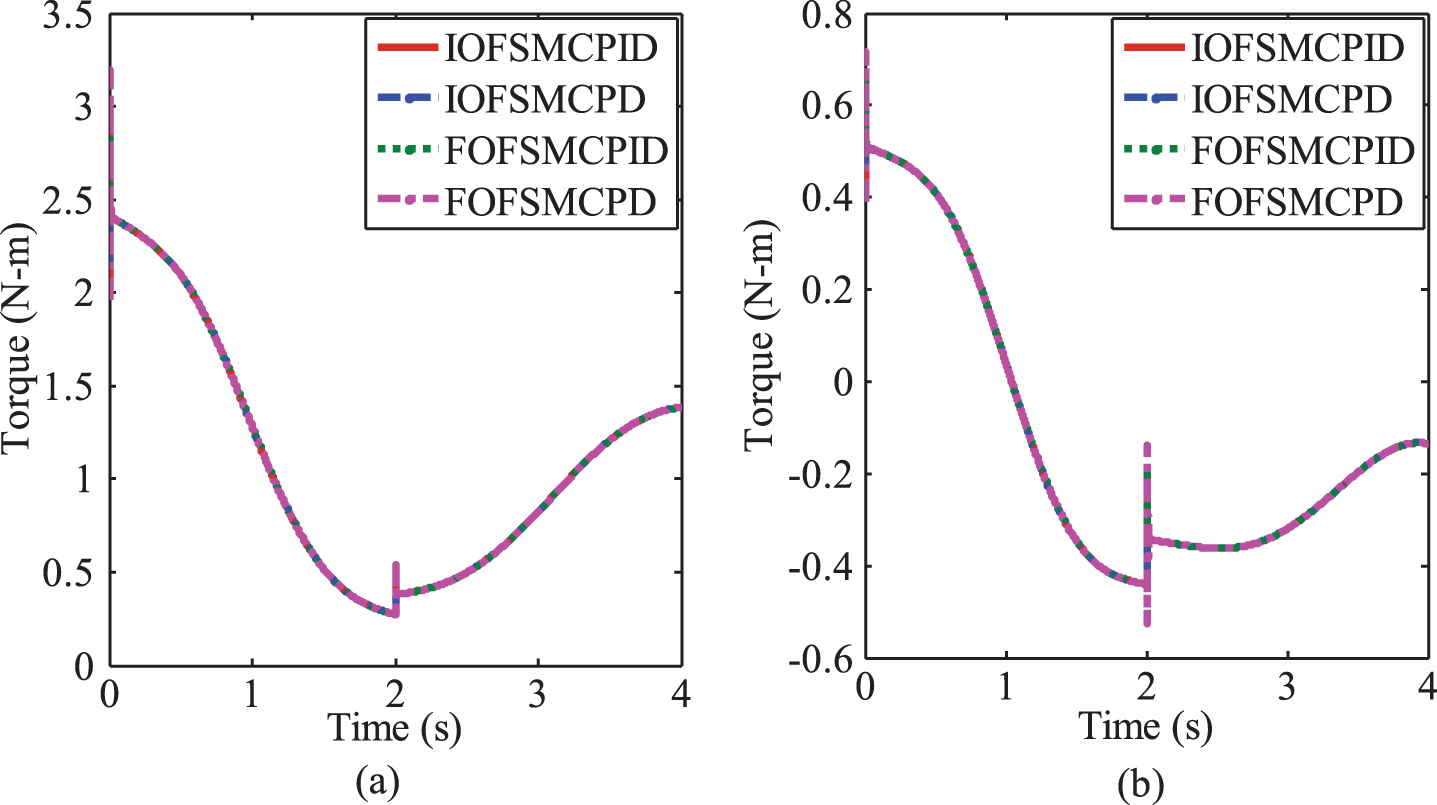
Controller outputs for trajectory tracking: (a) link-1 and (b) link-2.
A robust controller must have the capability to neutralize the effect of disturbances, noise and parameter uncertainties. These could occur individually or in combination and the overall tendency would be to degrade the performance from the nominal designed one. Therefore, to further access the performance of the controller’s investigations on disturbance rejection, noise suppression and model uncertainty handling capabilities have been carried out and presented in this section. Following are the category wise investigations carried out on all the four controllers i.e. IOFSMCPID, IOFSMCPD, FOFSMCPID and FOFSMCPD to evaluate the complete performance analysis.
OBF values for disturbance rejection study: increasing amplitude in both the link
OBF values for disturbance rejection study: increasing amplitude in both the link
OBF for disturbance rejection study: Decreasing amplitude in both the links
One of the main objectives of a good control algorithm is to reject the undesired disturbance satisfactorily so as to allow the desired path following smoothly. In the present study the disturbance signals comprising of one pulse for the entire trajectory, as described in Equation (41), were injected at the controller output, before the saturator in both the links together.
Since the amplitude of disturbance can either be positive or negative, six cases were generated for each of the negative as well as positive disturbances. For the positive disturbance case, six cases were generated by varying the amplitude of disturbance from 2 to 12 N-m with a step size of 2 N-m while it was varied from –2 to –12 N-m for the negative disturbances. OBF values for both the links were recorded. Table 5 and Table 6 present the obtained OBF values for positive as well as negative disturbance investigations. It can be clearly observed from these investigations that FOFSMCPID controller offers much less values of OBFs, making this as a superior control scheme. In addition to the above, the complete analysis in terms of the trajectory tracking curves and corresponding controller outputs are presented in Figs. 9–11, for a typical case of 12 N-m amplitude disturbance. From these results, it can be inferred that FOFSMCPID controller is able to improve the OBF values by 99.26% , 99.17% , and 78.46% over IOFSMCPID, IOFSMCPD, and FOFSMCPD controllers, respectively. The capability of disturbance rejection can be easily observed in trajectory tracking curves where FOFSMCPID is able to track smoothly while large deviations can be seen in IOFSMCPID, IOFSMCPD, and FOFSMCPD controller’s performances.
Trajectory tracking curves for a disturbance of amplitude 12 N-m: (a) link-1 and (b) link-2.
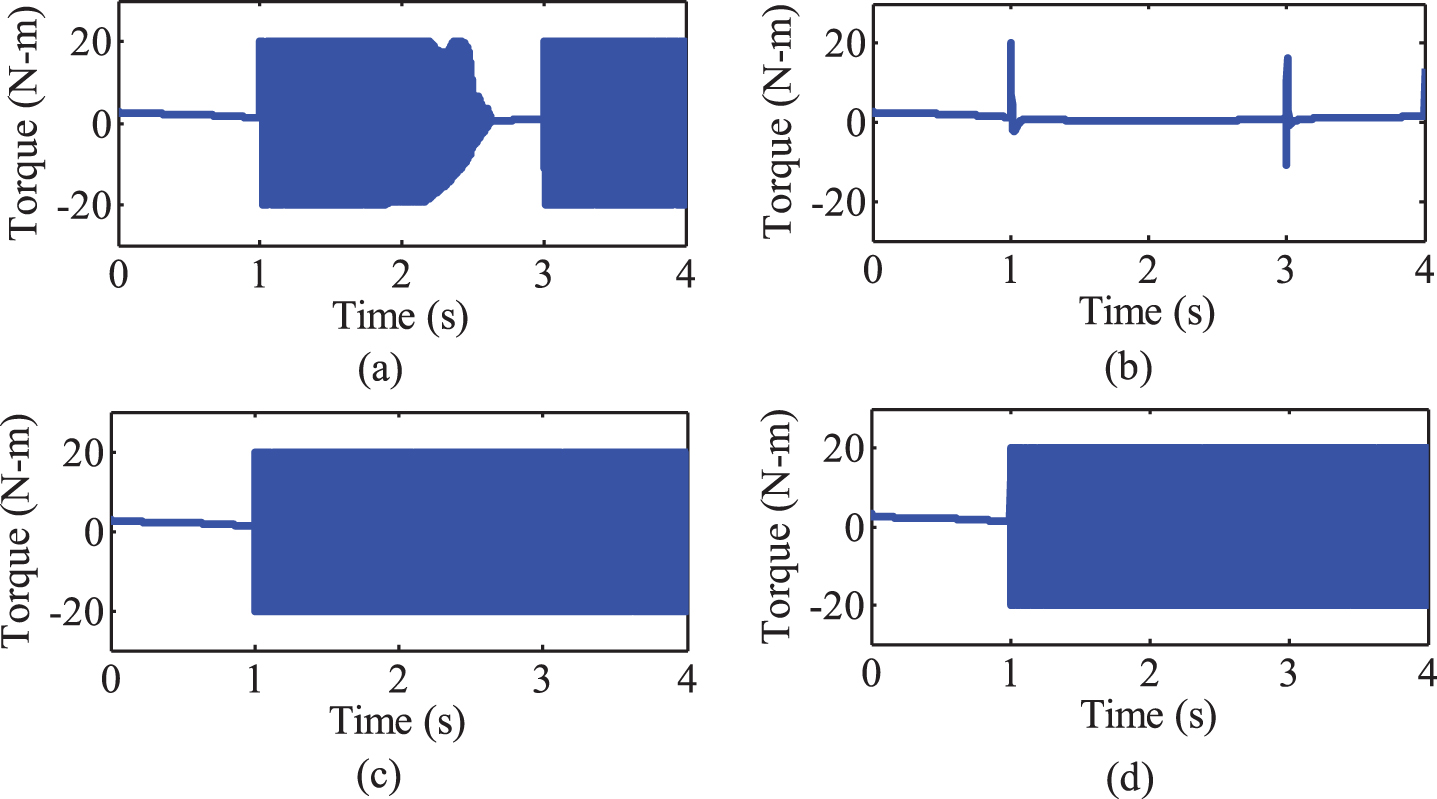
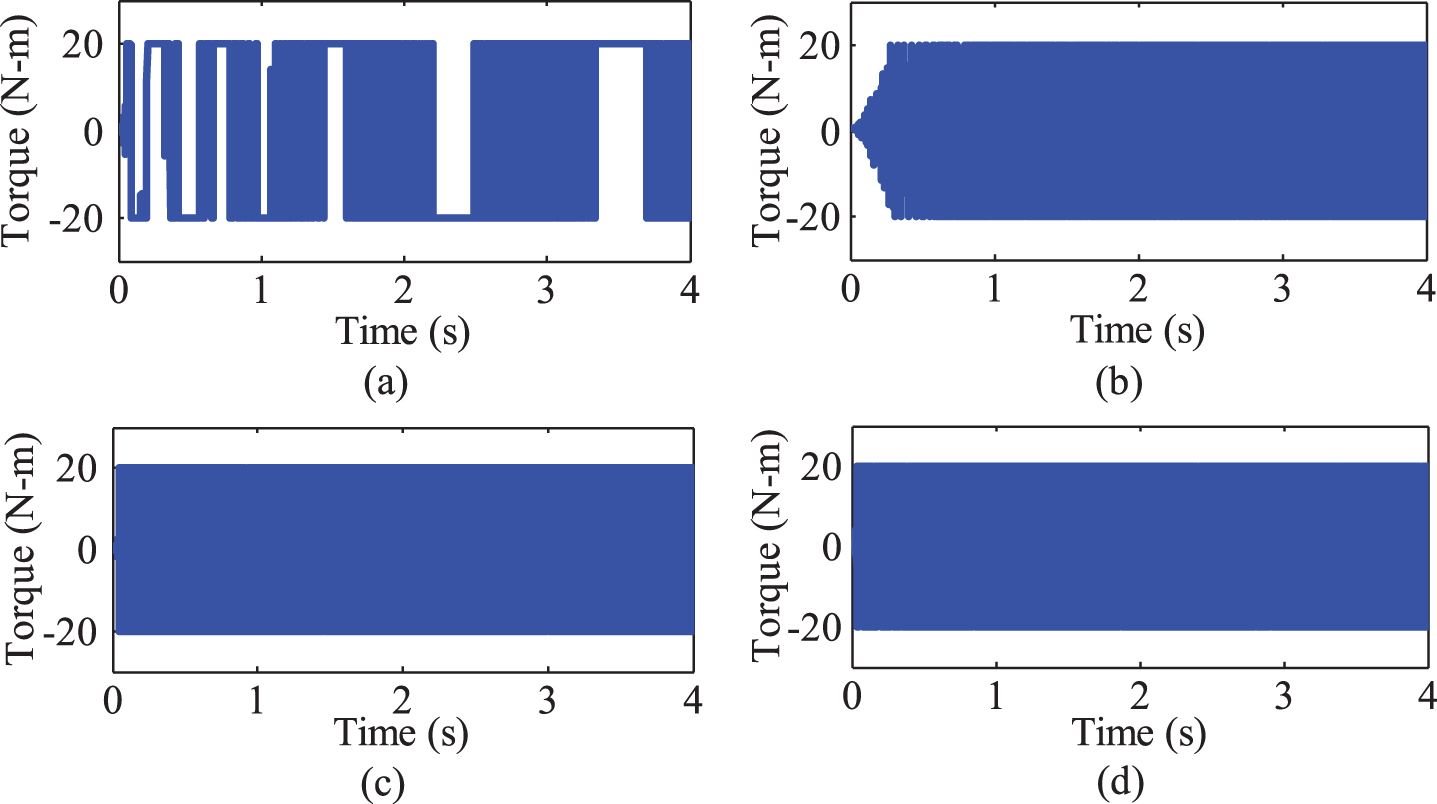
Controller outputs of link-1for a disturbance of amplitude 12 N-m: (a) IOFSMCPID (b) IOFSMCPD (c) FOFSMCPID (d) FOFSMCPD.
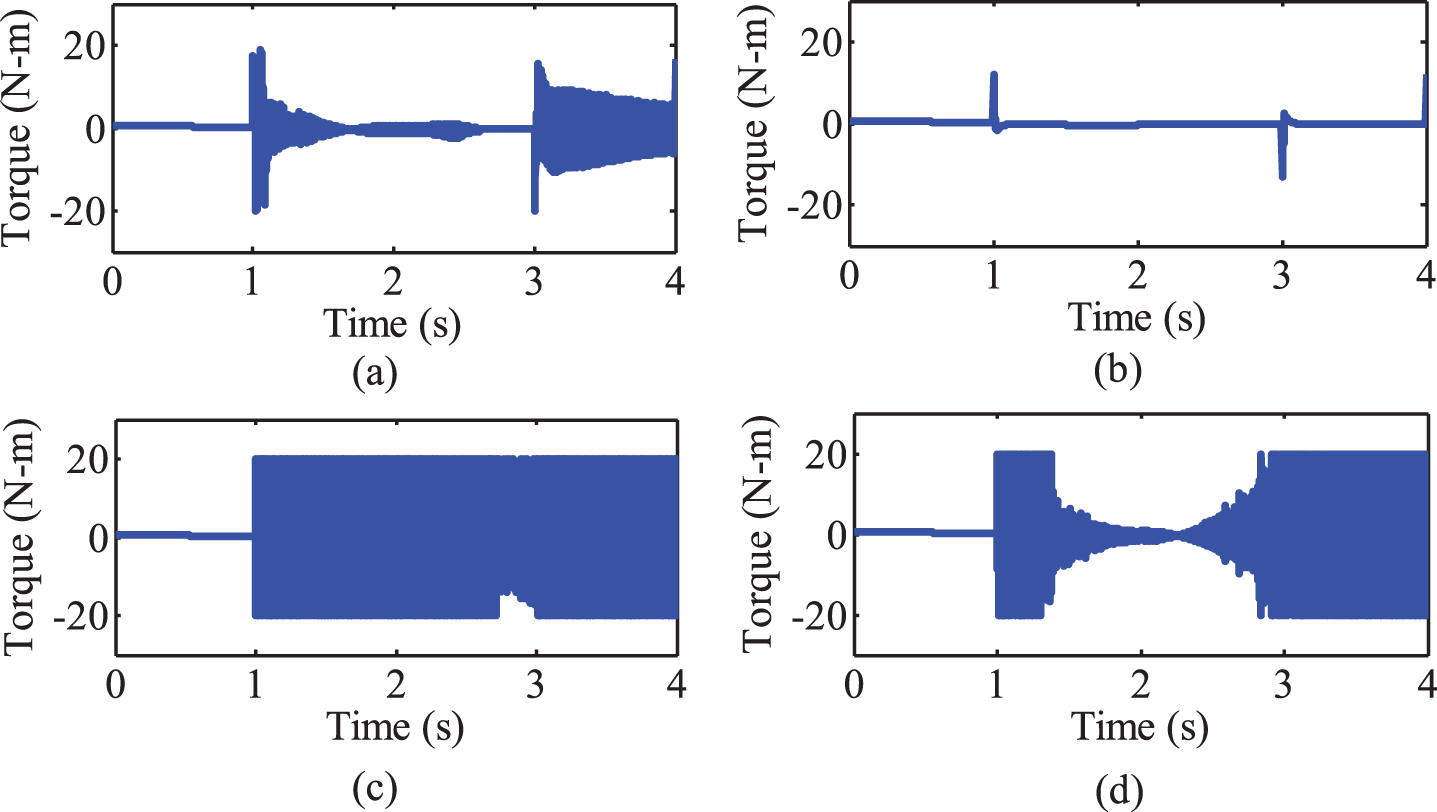
Controller output of link-2 for a disturbance of amplitude 12 N-m: (a) IOFSMCPID (b) IOFSMCPD (c) FOFSMCPID (d) FOFSMCPD.
In the robust control of electromechanical system like manipulator, sensor provides the information about current system output to the controller.
Sometimes this information contaminates with random noise which degrades the system performance and to some extent this noise is unavoidable in nature. Therefore, a robust controller must have the capability to eliminate the effect of this unwanted noise. The variations of performances for noise suppression have been presented in this subsection. A random noise of 0.5% of the instant reference trajectory has been considered in the measurement part of the manipulator feedback system in both the links together where the output of sensor is nowconsidered as:
Graphical representation of trajectory tracking performances in case of noise suppression and their controller output curves for both the links have been shown in Figs. 12–15, respectively. Relatively large oscillations can be easily seen in the trajectory tracking responses in case of IOFSMCPID, IOFSMCPD, and FOFSMCPD controllers which indicate a poor tracking performance as compared to FOFSMCPID controller. Very large oscillations in IOFSMCPID shows that it fails to offer sufficient controller output for noise suppression. Corresponding IAE and OBF values have been listed in Table 7. On the basis of obtained simulated results, it can be inferred that FOFSMCPID performs best among the four controllers in the case of noise suppression also. The improvements of OBF values in case of FOFSMCPID controller on IOFSMCPID, IOFSMCPD, and FOFSMCPD are estimated to be 99.98% , 45.42% and 1.618% respectively.

Trajectory tracking curves for link-1 noise suppression (a) IOFSMCPID (b) IOFSMCPD (c) FOFSMCPID (d) FOFSMCPD.
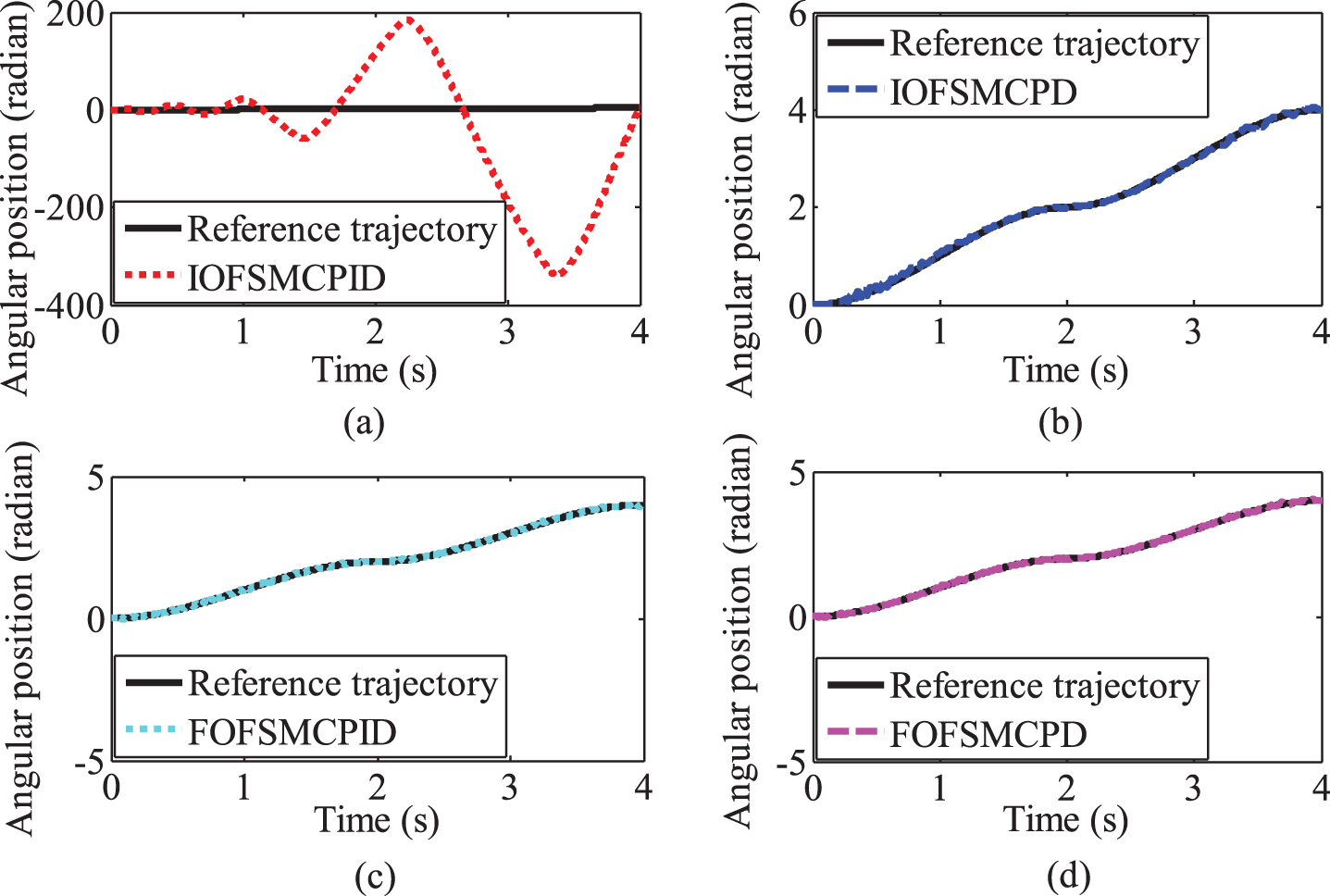
Trajectory tracking curve for link-2 noise suppression (a) IOFSMCPID (b) IOFSMCPD (c) FOFSMCPID (d) FOFSMCPD.
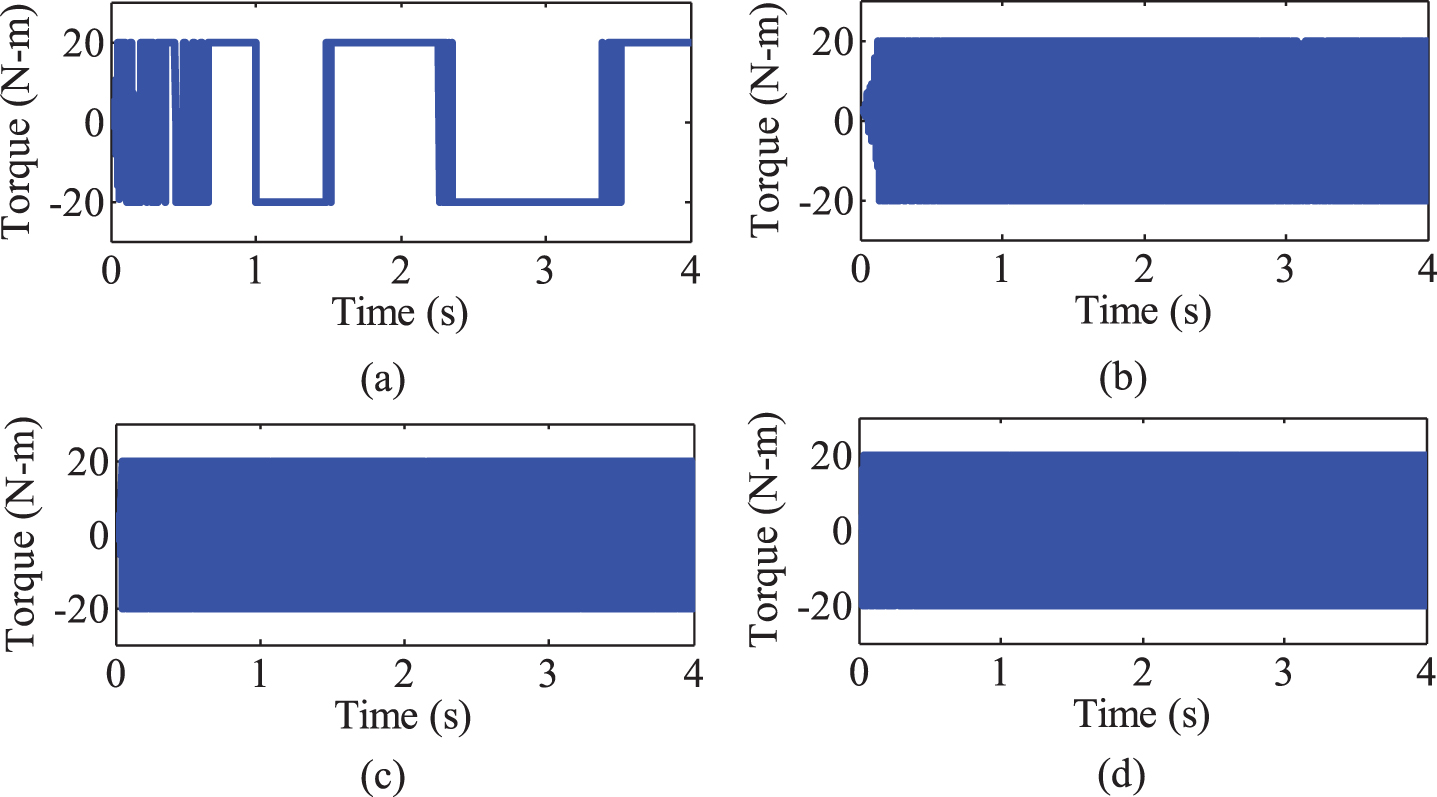
Controller outputs of link-1for noise suppression (a) IOFSMCPID (b) IOFSMCPD (c) FOFSMCPID (d) FOFSMCPD.
Controller outputs of link-2 for noise suppression (a) IOFSMCPID (b) IOFSMCPD (c) FOFSMCPID (d) FOFSMCPD.
IAE and OBF values for noise suppression.
This sub-section elaborates the robustness testing methodology and results of the proposed controller. As described earlier, one task of the manipulator is to pick and place. It is not necessary that the object mass would be always same. Therefore, a robust controller must have the ability to eliminate the effect of mass variation in run time without changing the gain of the controller. In the mass uncertainty study, the masses of both the links are varied from 5% to 20% and the values of OBF are recorded in Table 8. For a particular case of mass increment in both the links as 20% , FOFSMCPID controller gives 66.87% , 93.34% and 99.65% improvements in OBF over IOFSMCPID, IOFSMCPD and FOFSMCPD controllers, respectively. Based on the presented mass uncertainty study, it can be inferred that the FOFSMCPID controller show superior performance among the four controllers.
OBF values for mass uncertainty in both links
OBF values for mass uncertainty in both links
In the present work, a robust intelligent adaptive controller i.e. fractional order fuzzy sliding mode proportional integral and derivative (FOFSMCPID) controller has been proposed and successfully tested in closed loop for efficient control of a two link planar rigid robotic manipulator system. Chattering, being a major concern in SMC, has been effectively handled by combining the fuzzy logic based intelligent technique and boundary layer scheme. Exponential law was used to design the SMC to reach the system output at surface where Lyapunov stability theorem ensured the stability of closed loop system. The performance index, defined as the weighted sum of integral of absolute error and chatter, was minimised using cuckoo search optimization algorithm to find the optimum gains of the controller. Comparative studies have been performed for reference trajectory tracking, disturbance rejection, noise suppression and uncertainty handling with integer order fuzzy sliding mode proportional, integral and derivative (IOFSMCPID) controller, integer order fuzzy sliding mode proportional and derivative (IOFSMCD) controller, and fractional order fuzzy sliding mode proportional and derivative (FOFSMCPID) controller. On the basis of the obtained simulated results, it was concluded that FOFSMCPID controller outperforms rest of the controllers in all the aspects of performances carried out for evaluation of controllers.