
Abstract
The magnetic levitation systems of maglev vehicles face the problems of open-loop instability, strong nonlinearity, model uncertainty, and large external disturbances. In order to solve the problems of model uncertainty and exogenous disturbances simultaneously, a T-S fuzzy model of magnetic levitation system with exogenous disturbances and model uncertainties is constructed to obtain an overall control model. A fuzzy H∞ robust state feedback controller for magnetic levitation systems is designed based on parallel distribution compensation (PDC) design method and the proposed T-S model. The quadratic stability of the closed-loop magnetic levitation system with fuzzy robust control law is proved. The linear matrix inequality (LMI) is utilized to obtain a controller which can satisfy the H∞ performance index and the stability of the magnetic levitation system with the proposed control law is proved by Lyapunov method. Both simulation and experimental results are included to demonstrate that the proposed control law can ensure the stable suspension of the vehicle and can restrain the exogenous disturbance effectively. Compared with conventional PID controller, the presented controller can assure faster dynamic response, stronger robustness and smaller overshoot under both exogenous disturbances and model uncertainties.
Introduction
In the past decades, the maglev vehicle is considered to be one of the most promising urban rail traffic systems for its lower noise, more comfortable feeling, a stronger climbing ability, and more environmentally friendly [1–4]. The precise levitation control of the airgap between the maglev vehicle and rail is the key technology we focused. Unfortunately, the magnetic levitation system is essential strong nonlinear and open-loop unstable, and it suffers from model uncertainty and exogenous disturbance [6, 7]. Therefore, it is very challenge to achieve high performance vehicle levitated control.
The magnetic levitation system is of the maglev vehicle, which has received abundant attention from many scholars in the modern control field in recent years. The traditional levitation control method of maglev vehicle needs to Taylor extend linearly at the equilibrium point of the system firstly, and then the controller is developed by using the linear control method [8–11]. Its equilibrium region is severely restricted. Nevertheless, the magnetic levitation system has essential nonlinearity, so it is more likely to lose stability under larger disturbances with linear controllers. Because the levitation airgap of maglev vehicle is very small, which is about 9mm, the loss of stability of the system caused by exogenous large disturbance may cause a major accident. Moreover, as a passenger-carrying vehicle, the changing load and other model uncertainties significantly affect the dynamics and robustness. In fact, there are more and more demands to improve the dynamics, robustness and overall performance of the magnetic levitation system. Currently, many innovative advanced control schemes for maglev vehicle have been designed and reported in many literatures. Hatano et al. [12] proposed fuzzy set theory based speed and position controls for magnetic levitation systems. But the robustness of the system wasn’t considered. Wang et al. [13] put forwards a new state feedback controller with the magnetic track’ s vibration state observer, which can automatic tune the control gain. The results show the robustness of maglev vehicles can be increased. However, the controller was designed based on a linear approximation model, and the control performance will deteriorate when the maglev vehicle leaves the equilibrium point. Gutierrez et al. [14] presented a MIMO sliding mode controller for EDS MAGLEV with a nonlinear high gain observer. However, the influence of the nonlinear observer parameters on controller performance is significant. Wai et al. [15] utilized position state feedback to design an adaptive fuzzy-neural-network controller (OAFNNC) for hybrid maglev transportation system. This control strategy can ensure the stability of the closed-loop system despite the existence of uncertainties, but there are no tuning rules of control parameters of the OAFNNC. Tran et al. [16] presented an AFTC controller for the magnetic levitation system, which can eliminate the singular problem in arbitrarily finite-time with uncertain dynamics. He et al. [17] utilized the LQR theory and a disturbance nonlinear observer to achieve a steady levitation. Wang et al. [18] proposed a fractional order sliding mode controller for the fractional order Maglev suspension system with mismatched disturbances. Based on Takagi-Sugeno fuzzy model, Su et al. [19] developed a novel fuzzy controller in a nonparallel-distributed compensation method for the EMS system, and the numerical simulation is included to verify the effectiveness of the presented controller in the presence of bounded disturbances. Sun et al. [20] proposed a novel state feedback control method to ensure the global stability and fast response of the magnetic levitation system by using the vibration information of maglev guideway in theory, but experiments have not been performed to verify it.
From the above, the most urgent problems that the magnetic levitation systems face now are model uncertainty and many exogenous disturbances, such as the uncertainty of the passenger weight, wind disturbance, and irregularities of the rail. At present, the commercial magnetic levitation controller for maglev vehicle is linear PID controller. When the parameters change or the external disturbance is large, the system will have slower response speed, larger overshoot, vibration and even lose stability under the current linear controller. Aiming at these problems, a fuzzy H∞ robust control based on T-S model for maglev trains is proposed to consider external disturbances, non-linearity and parameter uncertainties. In the early 1980s, the design idea of the control system with H∞ norm as the optimization performance index was proposed by Canadian scholar Zames. Then, in 1982, the control theory with H∞ norm as the performance index was widely developed by American scholar Doyle, which to verify the robustness with the structural singular value. In recent years, robust H∞ control has always been one of the hottest research methods, and gets some results, but there are few studies on H∞ robust control for T-S fuzzy models for the maglev vehicle. In this paper, The quadratic stability of the closed-loop system under fuzzy robust control is proven. The linear matrix inequality (LMI) is utilized to obtain a controller which can satisfy the performance index.
The main contributions of the paper are as follows. A novel T-S fuzzy model for the magnetic levitation system is proposed considering uncertainties and external disturbance. The state feedback control law is designed based on T-S fuzzy model and parallel distribution compensation (PDC) method. The quadratic stability theory is used to prove the quadratic stability of the uncertain maglev system based on the T-S fuzzy model. We provide an effective method of designing fuzzy H∞ robust controllers according to PDC algorithm and linear matrix inequality (LMI) to ensure the controller satisfies H∞ performance. The experimental verification of fuzzy H∞ robust controller for maglev vehicle is for the first time implemented and demonstrated.
The rest of this paper is organized as follows. In section 2, the T-S fuzzy model for magnetic levitation system is established. Section 3 designs the Fuzzy H∞ Robust Controller based on PDC. Section 4 implements the H∞ performance index and stability analysis. Simulation and experiment results are shown in Section 5 and 6, respectively. Finally, the conclusions and future work directions are drawn in Section 7.
T-S fuzzy model for magnetic levitation system
Dynamics of magnetic levitation system
Through structure decoupling of maglev bogie, the levitation system can be decomposed into a single magnetic levitation system [21]. Taking the single magnet system as control object is more versatile to design a control law for the maglev vehicle [22–24]. Thus, the magnetic levitation system of maglev vehicle is simplified into a single-magnetic levitation model as illustrated in Fig. 1.
Based on references [16–19], the mathematic model of the open-loop magnetic levitation system can be obtained as follows:
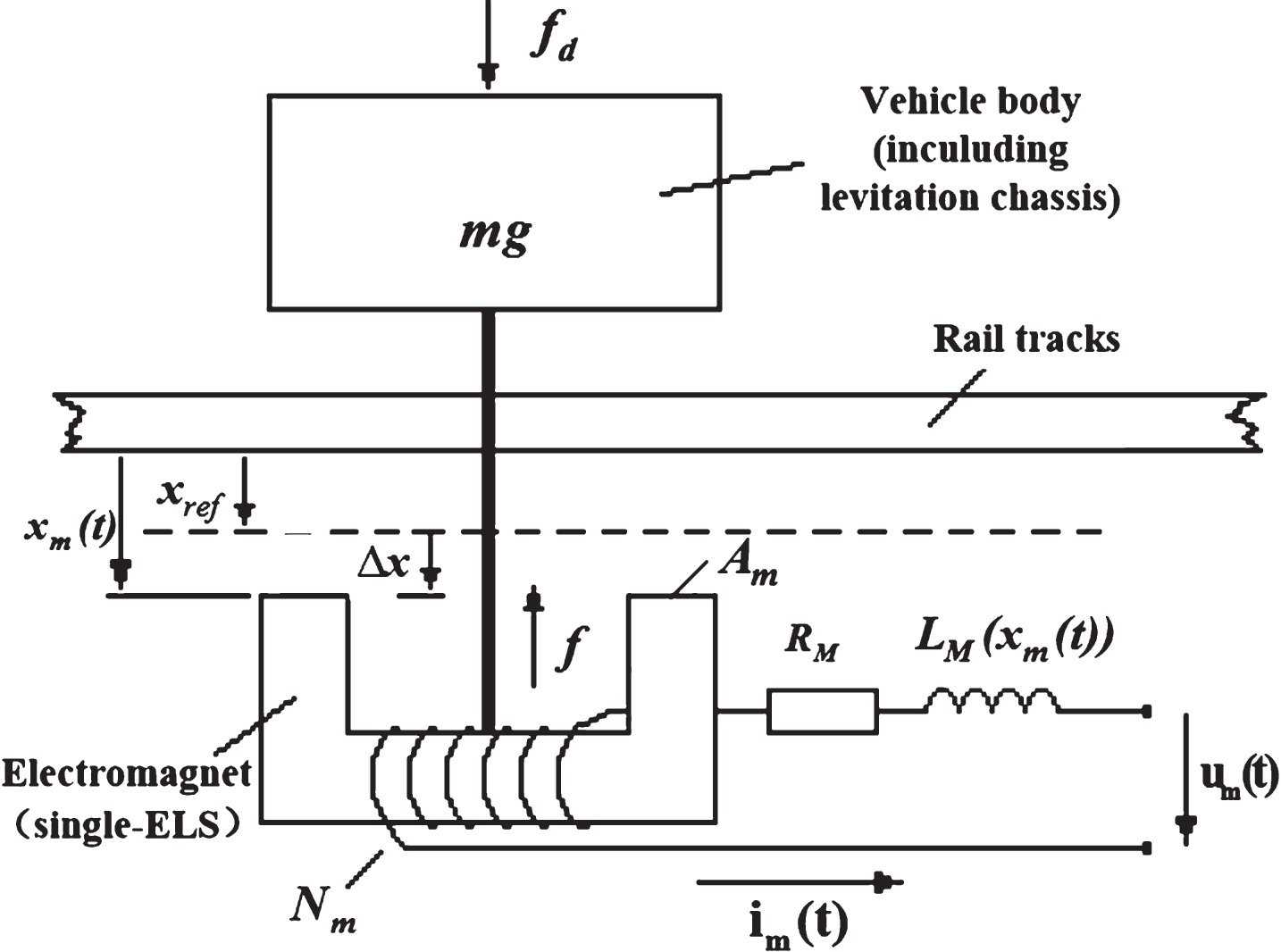
Configuration of the magnetic levitation system.
It is obvious that the magnetic levitation system is strongly nonlinear. At the same time, the control object has the uncertainty of the model due to the uncertainty of the weight of the carriage. For control objects with both nonlinearity and uncertainty, it’s difficult to design the controller. In this paper, to solve the problem, the nonlinear control object is re-modeled by the T-S model.
Since the maglev vehicles use choppers to directly regulate the current, we establish a T-S fuzzy model of the state equation of the magnetic levitation system with current control. Besides, the following rules are utilized to describe the dynamic behavior of the system as follows:
R1: if x1 is about 0 and x2 = 0 then
R2: if x1 is about 4 and x2 = 0 then
The second equation in Equation (1) is subjected to Taylor expansion at the equilibrium point (x
ref
, i
ref
), and the higher order term above the second order is ignored. The equation can be rewritten as follows:
Where,
Then, the state space equation under the current control of the magnetic levitation system without external disturbance can be written as follows:
Therefore:
The linear model of the system near
Similarly, B can be solved as:
According to the first expression of Equation (1) and
Also, by:
The second line
So, the T-S model of the magnetic levitation system without external disturbance is described specifically as:
R1: if x1 is about 0 and x2 = 0 then
R2: if x1 is about 4 and x2 = 0 then
Where,
The membership functions are selected as:
The global fuzzy model of the magnetic levitation system based on the T-S model considering external disturbances and parameter uncertainties is:
Where w is the disturbance input and D
i
is the constant matrix:
For the magnetic levitation system based on the uncertainty of the T-S model, the design flow chart of the Fuzzy H∞ Robust Controller is shown in Fig. 2.

Design flow chart of the fuzzy H∞ robust controller.
The fuzzy H∞ robust control of magnetic levitation system based on T-S model consists of three parts: magnetic levitation system, fuzzy H∞ robust controller, error of state feedback and desire airgap. The fuzzy H∞ robust control system structure of magnetic levitation system based on T-S model is shown in Fig. 3.

Fuzzy robust control structure diagram based on T-S model.
The controlled system model (8) is a weighted combination of multiple linear systems, which is essentially a nonlinear system. That can be considered as many local linear models are fuzzy approximating a nonlinear dynamic model.
A linear state feedback controller for each linear subsystem is designed using the PDC algorithm. The basic idea of the PDC algorithm is to design a controller corresponding to each rule of the fuzzy model described the control object. The designed controller is nonlinear, composed of multiple linear controllers. The control principle of the PDC algorithm design controller is illustrated in Fig. 4.

Principle diagram of PDC algorithm to design controller.
Although the controller of the whole system is designed based on each local linear subsystem, according to the Lyapunov method, the whole system has been proved to be globally asymptotically stable [25].
The T-S fuzzy model state equation for magnetic levitation system with parameter uncertainty and the external disturbance is described as follows:
The uncertainty matrix in the equation is bounded and is expressed as follows:
w is the disturbance input and D
i
is the constant matrix.
The fuzzy H∞ robust state feedback controller of the magnetic levitation system (8) based on the T-S fuzzy model using PDC method can be obtained as:
Substituting the above formula into the system (8), the entire closed-loop system under fuzzy H∞ robust control can be written as follows:
This section presents theoretical analysis for the H∞ performance index guarantee and stability of the closed-loop system with the proposed controller.
For a magnetic levitation system based on the T-S fuzzy model (8), we have the following theorem:
Then the H∞ norm of the closed-loop system (11) generated by the state feedback is less than γ.
Assume that:
The first term of (14) is transformed as:
Again, the proof of the second term is the same as above.
So there are:
Therefore, the closed-loop system (11) under the fuzzy robust controller of the magnetic levitation system based on the T-S fuzzy model is quadratic stable.
Then, we only need to prove that under the zero initial condition, for a given γ and any external input w (t) ∈ L2 [0, ∞), the control output z (t) satisfies
The first term is transformed as follows:
Similarly, the second term also < - d i xTx.
The third term is transformed as:
The fourth term is transformed as:
From x (0) = 0, there is V (x (0)) = 0,
Then, the H∞ norm of the T-S fuzzy system (8) is less than γ [27, 28].
Theorem 1, the proof is completed.
According to the above proof, we can derive the design method of fuzzy robust controller feedback matrix as follows:
The parameters of the levitation system are listed in Table 1.
Parameter values of the levitation system
Parameter values of the levitation system
According to Lemma 1, the following linear matrix inequality can be solved in MATLAB:
Where,
We can obtain that:
The fuzzy H∞ robust controller can be obtained as follows:
In order to demonstrate the superiority of the proposed controller, we also implement the simulations of PID controller [26], which is widely used in magnetic levitation system. The tracking target is r = 9mm, and the initial position is 8 mm from the target.
Simulation results for case 1 with the proposed controller and PID controller: airgap y (t).
The disturbance can be expressed as: F d = 900 sin(2t + π/2) -1000 sin(4t + π/2)
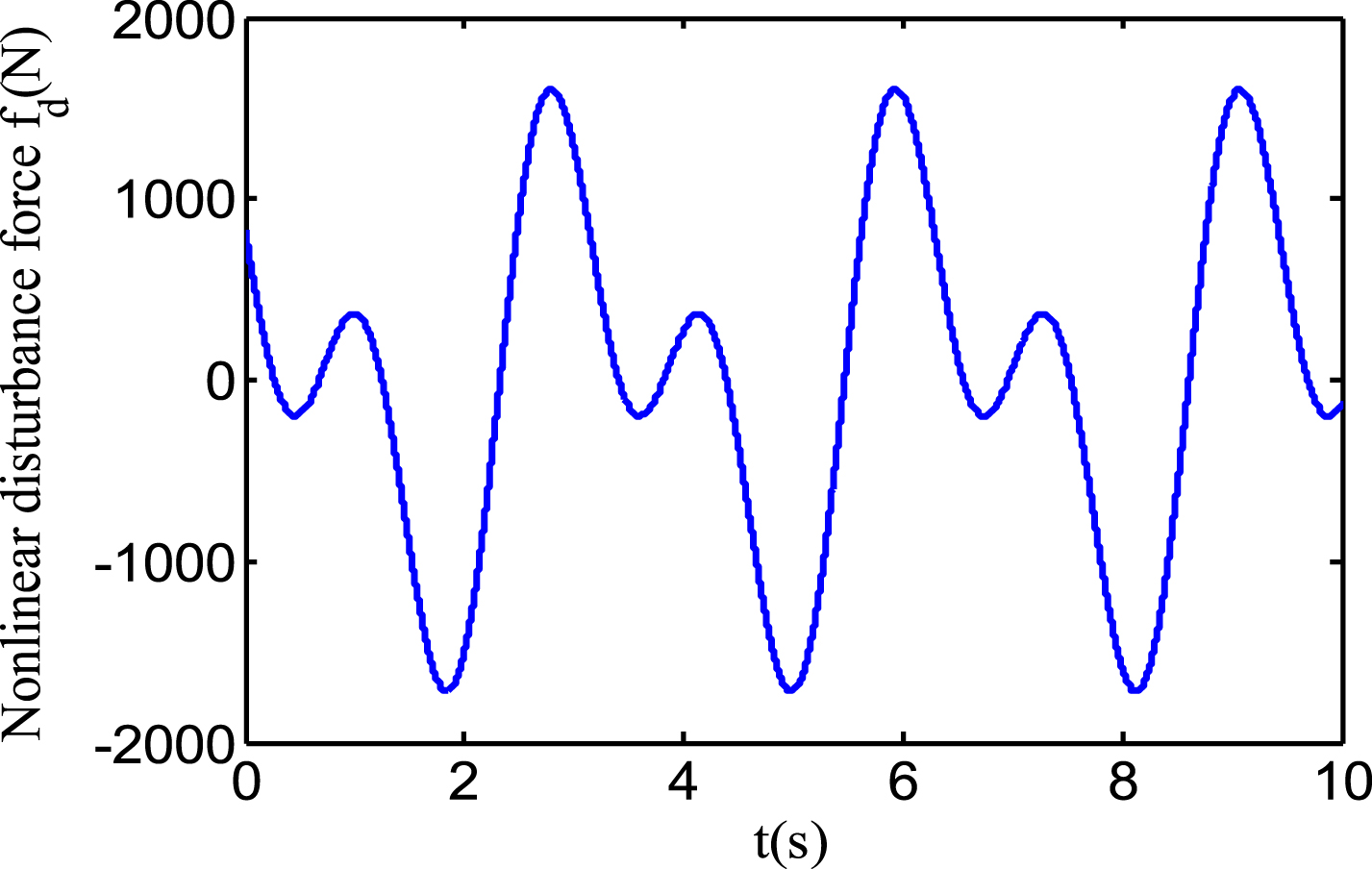
Nonlinear dynamic disturbance.
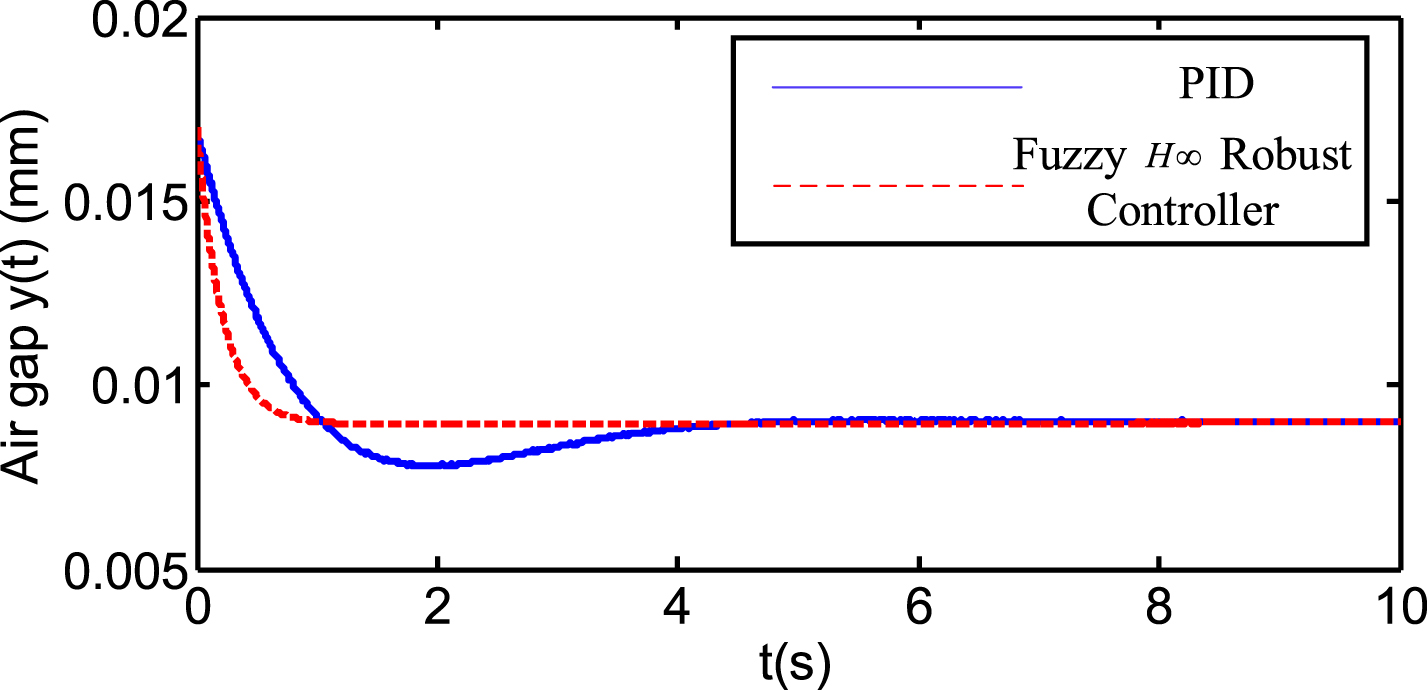
We can learn from the Figs. 5–7, the proposed controller can achieve superior control performance with non-overshooting, robust, fast dynamic response and satisfactory robustness under dynamic disturbance over the comparative PID controller. These results indicate that the presented controller shows robustness to external disturbances.
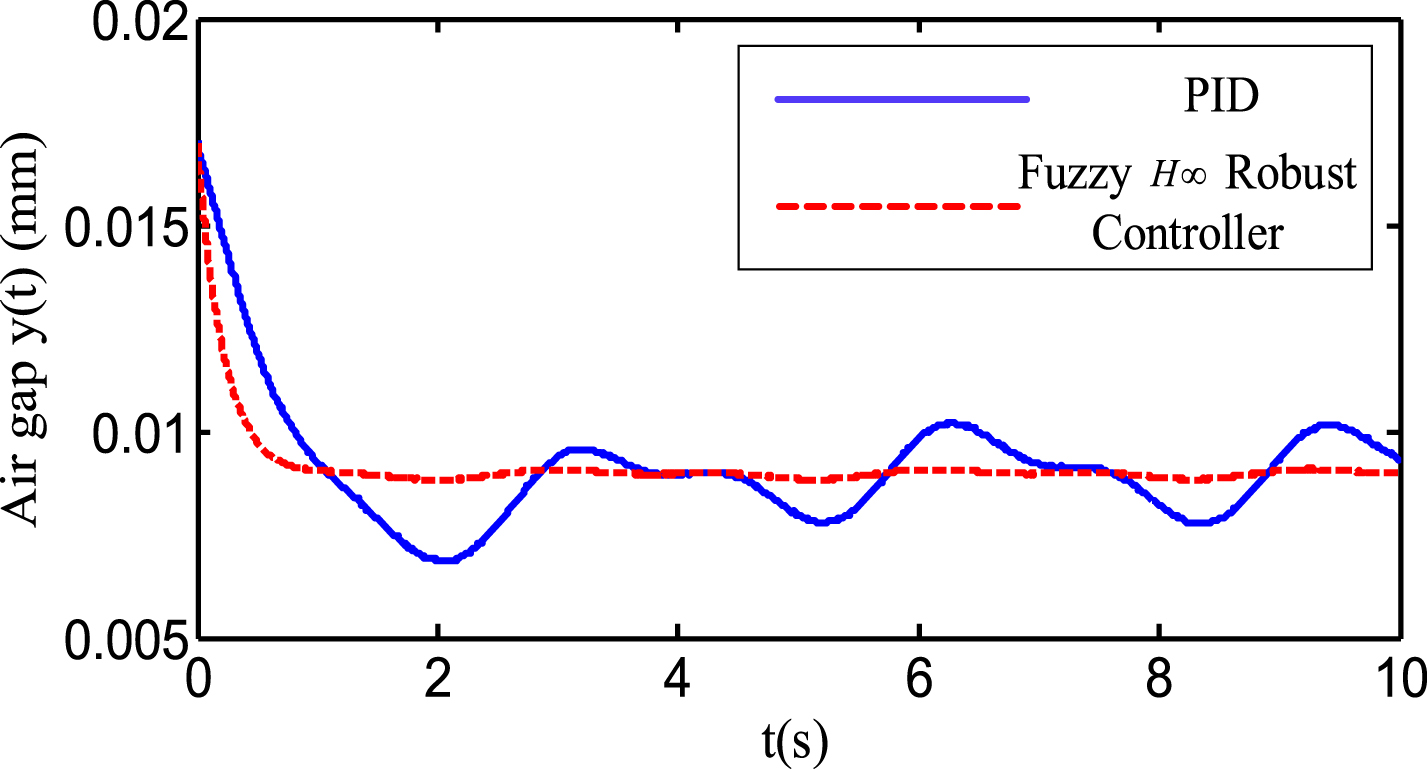
Simulation results for case 2 with the proposed controller and PID controller: airgap y (t)
In this paper, the low-speed maglev vehicle of the National Maglev Center is taken as the experimental platform, and the experiments are carried out under different external disturbances and system parameter perturbations. The simulation results and theoretical derivation of the new controller fuzzy H∞ robust controller are verified. Each control point of a low-speed maglev train consists of two electromagnets and a levitation control system, which act on the levitation and guidance of the train respectively. The suspension control system includes levitation airgap sensor, levitation digital circuit, A / D acquisition card and chopper. But in order to prevent the failure of the experiment from affecting the safety of the equipment, the rigid coupling between the coils of multiple electromagnets should be completely decoupled. The experiment is carried out in the form of single electromagnet, as shown in Fig. 8.

Single electromagnet maglev test platform.

Control flow chart.
The control process is shown in Fig. 9. The levitation airgap sensor and the acceleration sensor are used to detect the airgap and the airgap acceleration between the electromagnet and the F-shaped track respectively. The data type is converted by A/D acquisition card, and the digital quantity is converted into analog quantity, so the corresponding electric signal is obtained. DSP (digital signal processor) is used to control the arithmetic operation and output the current signal is needed by the electromagnet. According to the actual feedback current output PWM (pulse width modulation) pulse signal, the magnetic levitation main circuit is controlled.
However, due to the track random irregularity and many uncontrollable factors, if the information transmission speed is too low or the sampling frequency is too low, the sensor can not get the accurate sensor signal on time, so the controller can not adjust itself in time. Therefore, a debugging system based on USB-CAN is proposed. Its basic structure is shown in Fig. 10. USB-CAN interface card is a mature market product, which is no longer mentioned here; PC human-machine interface is written in C #.
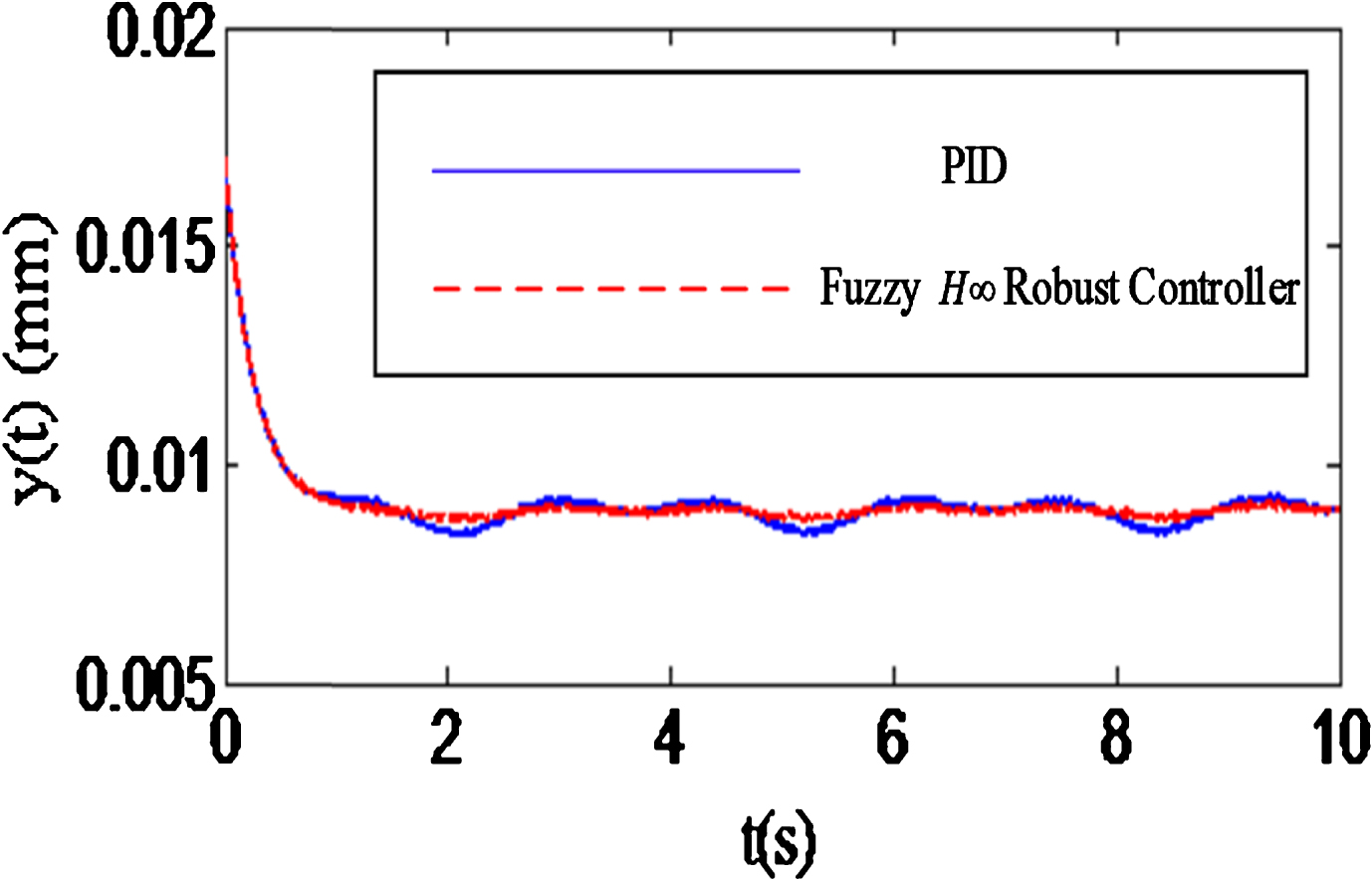
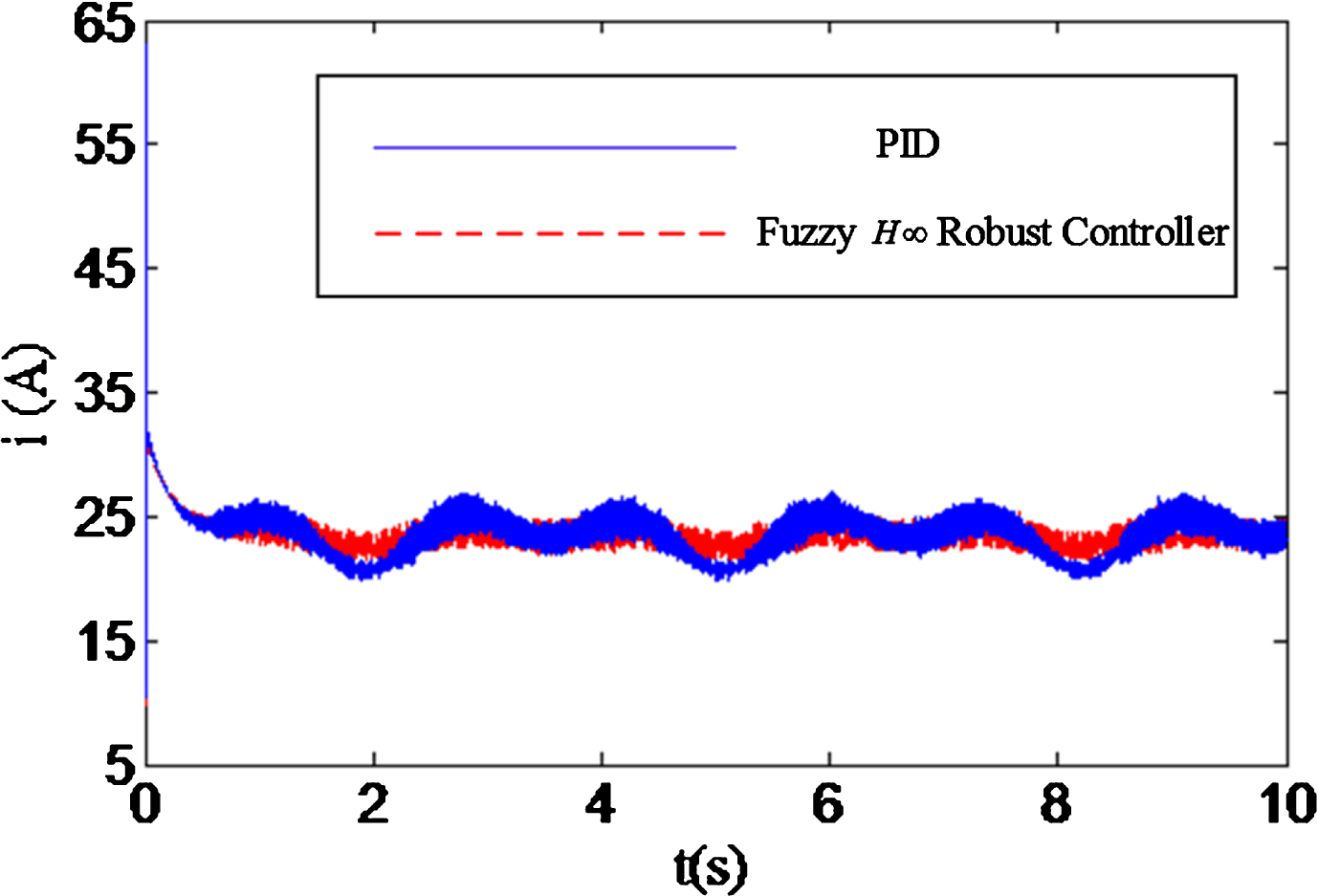
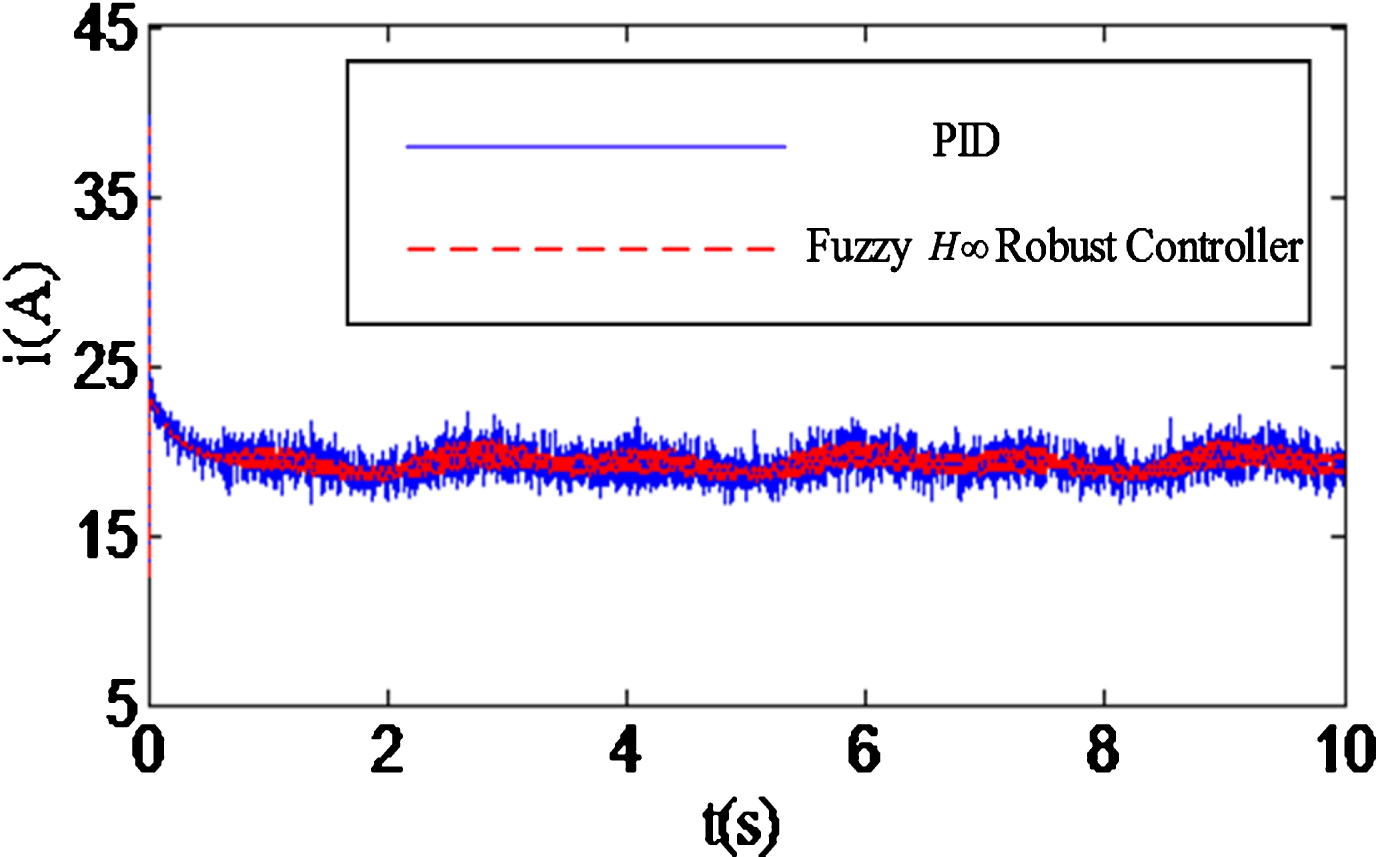
The desired stable levitation airgap of maglev vehicle during operation is set to 9mm, and the initial gap is 17mm. Experiments are carried out to verify the PID controller which is widely used and the fuzzy H∞ robust controller which is proposed in this paper. According to the analysis of the levitation current and the response of the levitation airgap, the validity of the controller is verified.
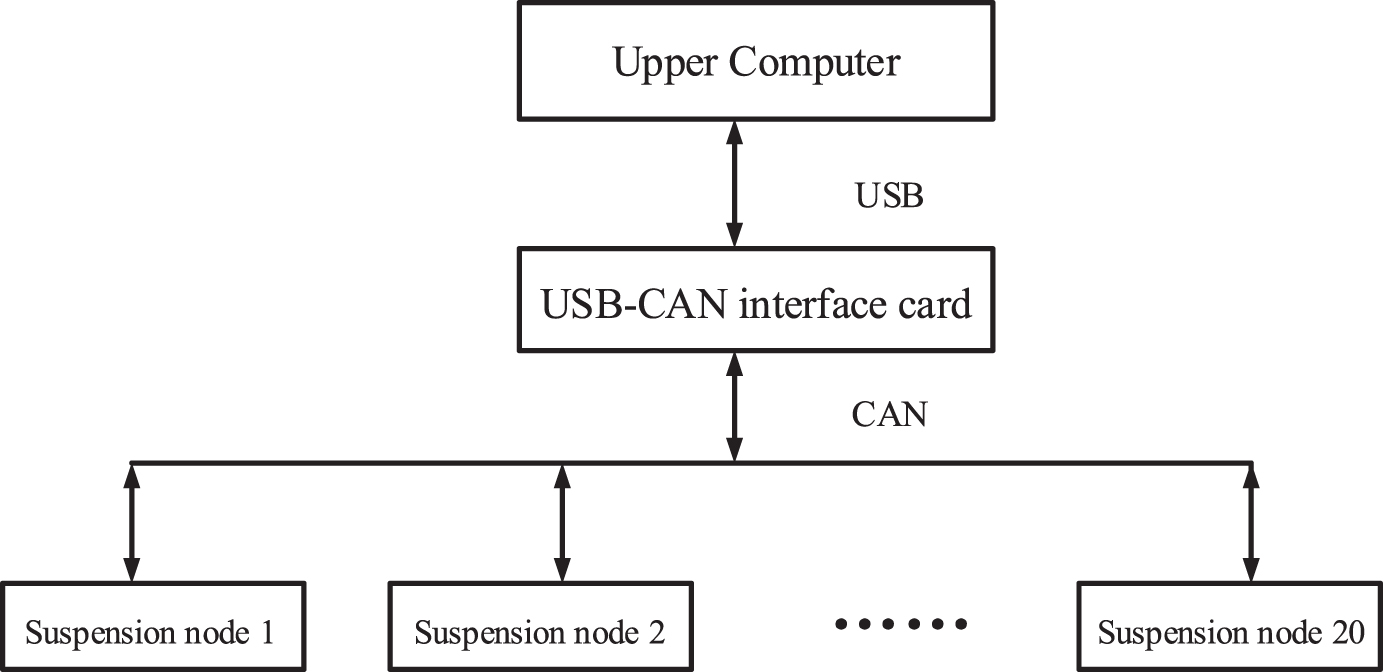
USB-CAN debug system structure diagram.
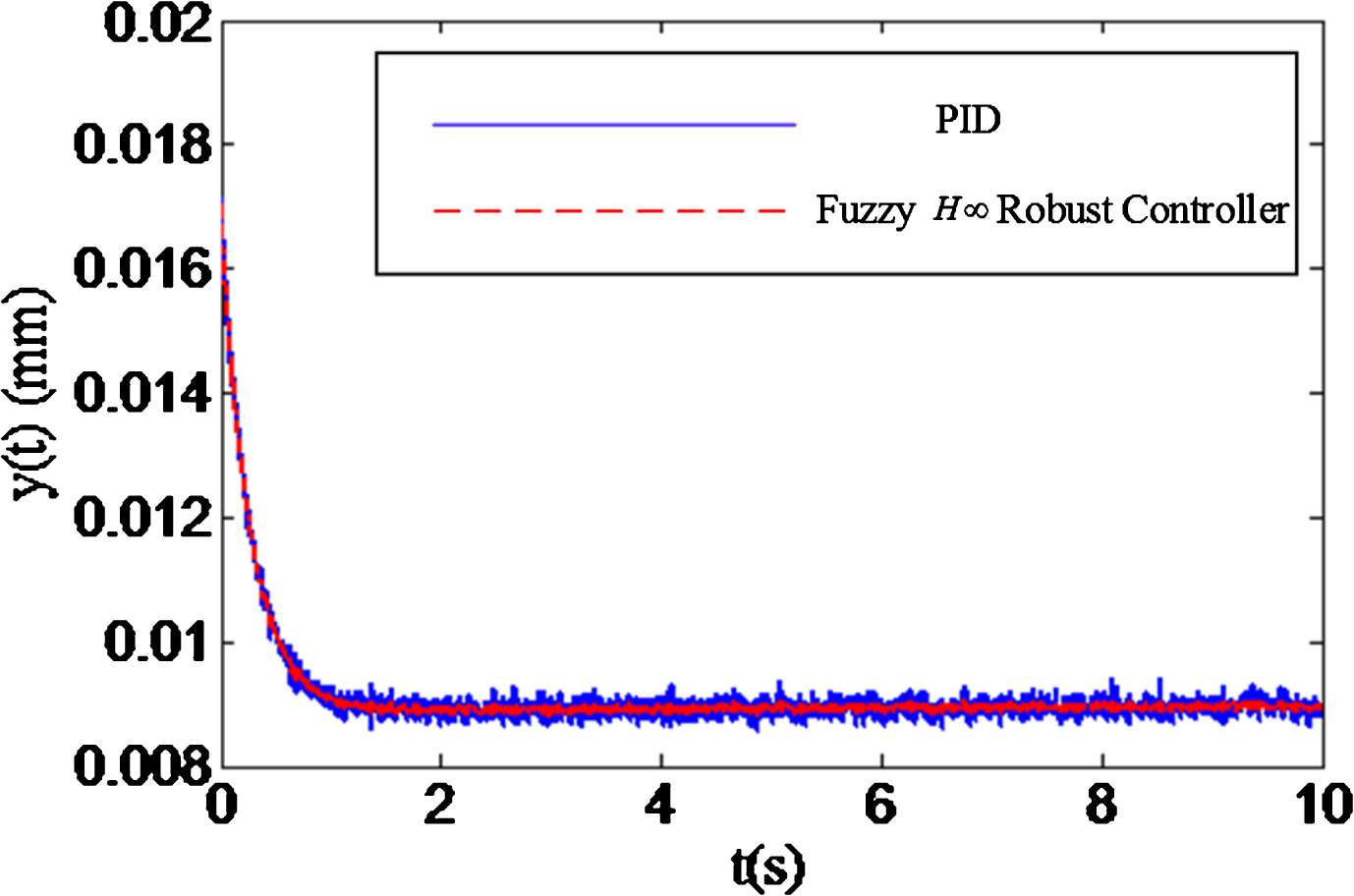
Comparison of levitation airgap response without external load disturbance.
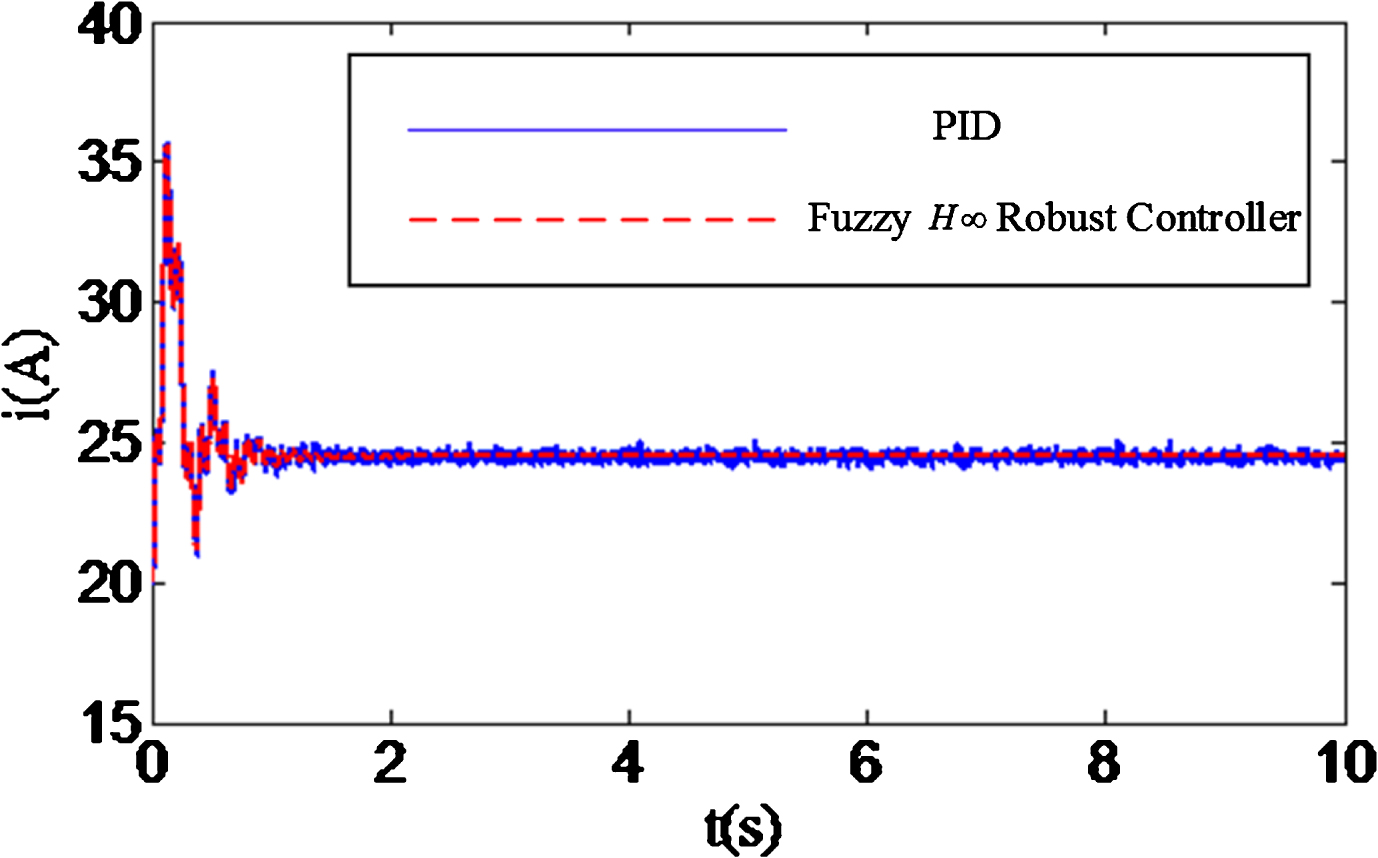
Comparison of levitation current response under no external interference.
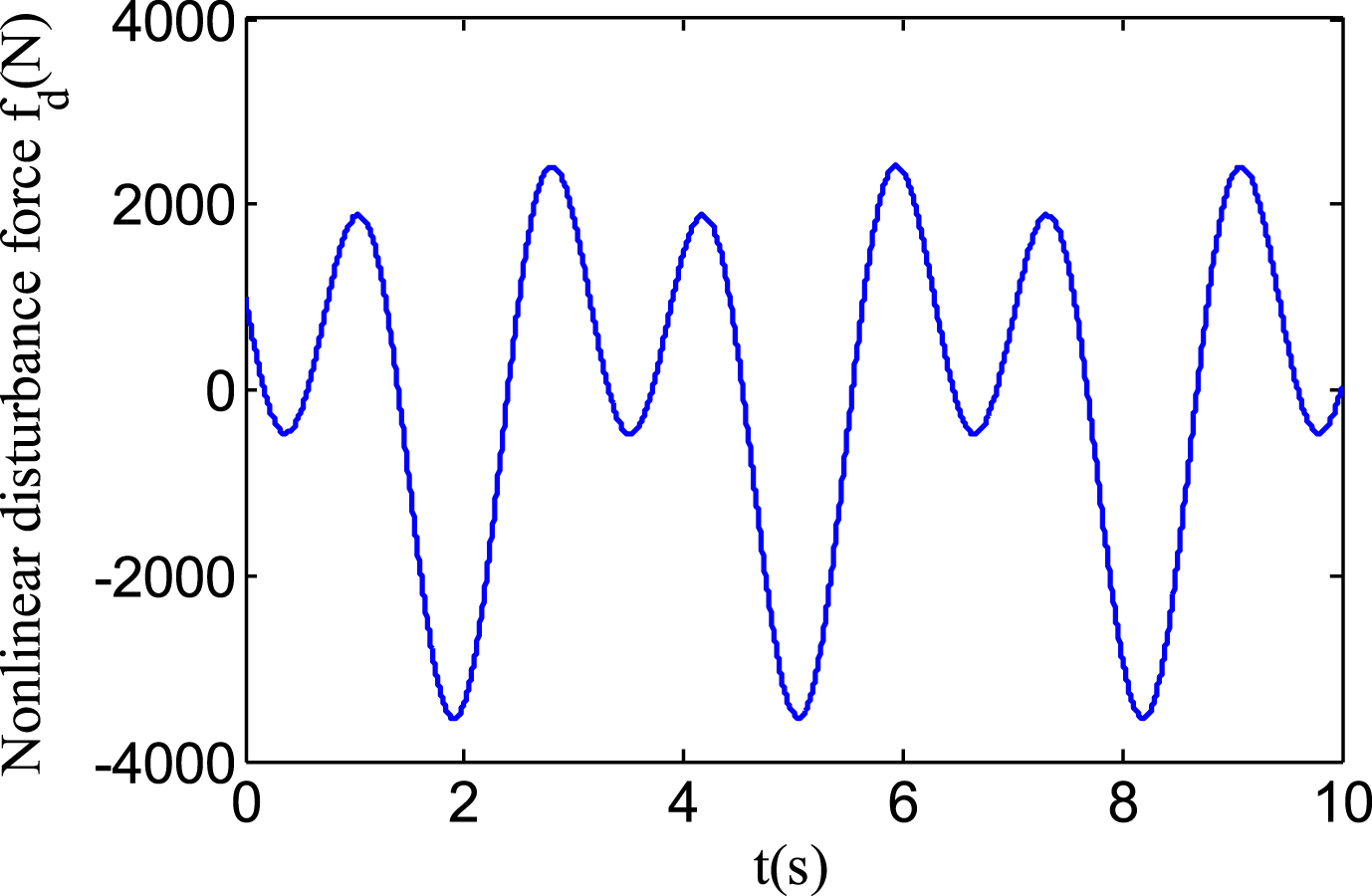
Periodic disturbance signal.
Comparison of suspension airgap response under periodic interference.
Track the desired position without external disturbances.
Dynamic disturbance response analysis
Comparison of suspension current response under periodic interference.
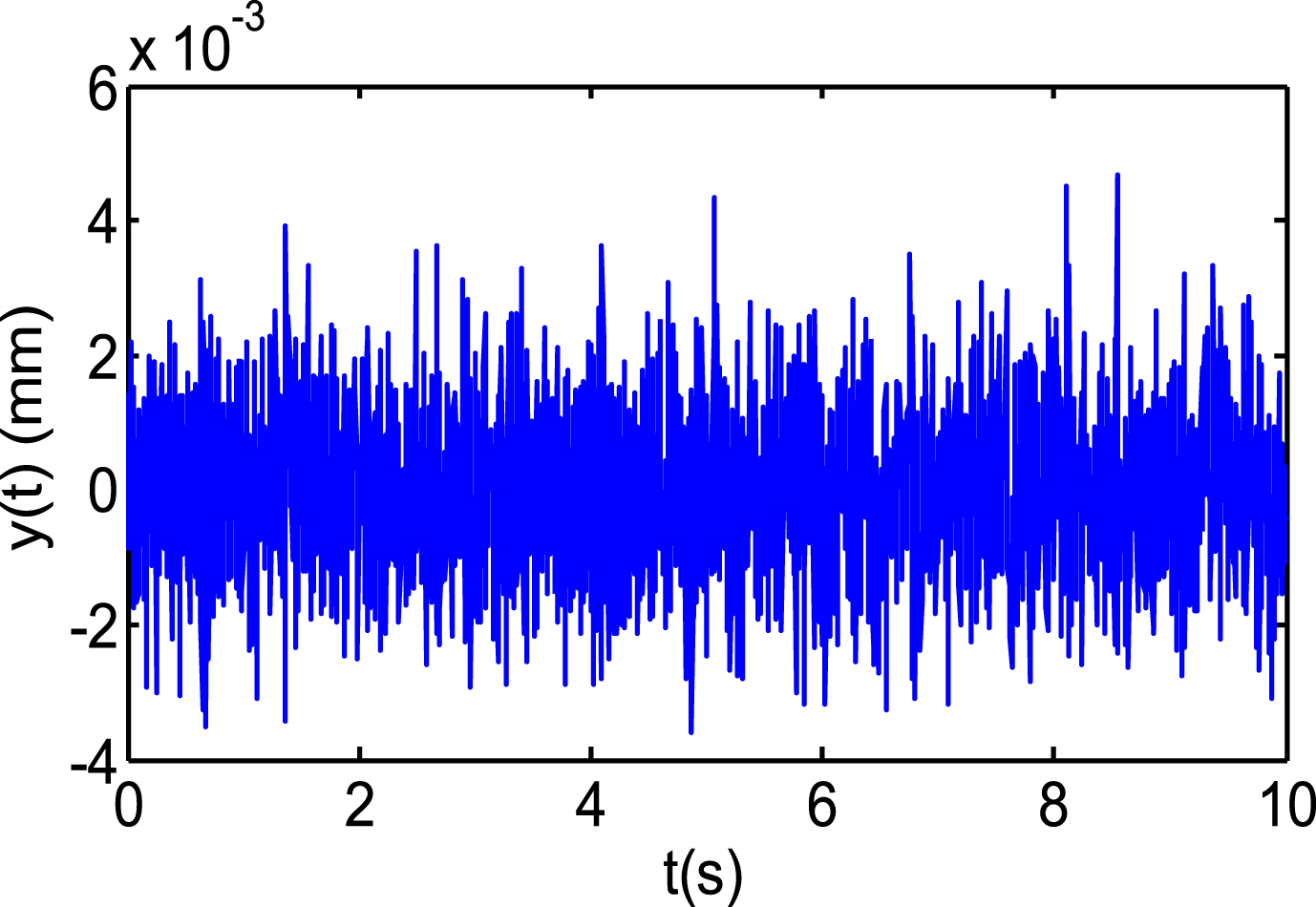
Excitation signal of track irregularity.
During the operation of maglev vehicle, it is unavoidable to encounter the situation that the gravity in the carriage suddenly increases or decreases. Because the maglev train has a small levitation airgap during the stable operation, the excessive gravity change is easy to cause the train break down or lose its stability.
The airgap responses of the conventional PID controller and the controller proposed in this paper are shown in Figs. 14, 15. The dynamic disturbance shown in Fig. 13 is applied to the system as soon as the data collected. Response analysis of levitation airgap excited by random irregularities
As shown in Fig. 16, the suspension airgap of the maglev train varies from time to time due to irregularities of the guideway. In this case, it is urgently required that the controller has better robustness to suppress the irregular excitation in real time. Moreover, the influence of the stable operation of the train caused by this irregularity can be minimized.
The experimental results in three cases are given by Figs. 11, 12, 14, 15 and 17, 18 respectively. According to Figs. 11 to 12, in the case of static levitation, the conventional PID controller cannot obtain the ideal PID parameters because of the limitation of manual adjustment of PID parameters. So it can only rely on experience to determine the value, which determines that the tracking performance is weaker than the Fuzzy H∞ Robust Controller proposed in this paper. The response speed of the initial suspension is almost the same as that of the conventional PID controller under the action of the load change shown in Fig. 13. But after reaching the target levitation clearance, Fuzzy H∞ Robust Controller has stronger robustness and tracking performance, so it has stronger anti-interference ability. In addition, the control current of the Fuzzy H∞ Robust Controller is much smoother than that of the PID controller, and it can suppress the variation of the vertical load with a more stable current, as shown in Fig. 15. Finally, under the Comparison of suspension airgap response under irregularity excitation. Comparison of suspension current response under irregularity excitation.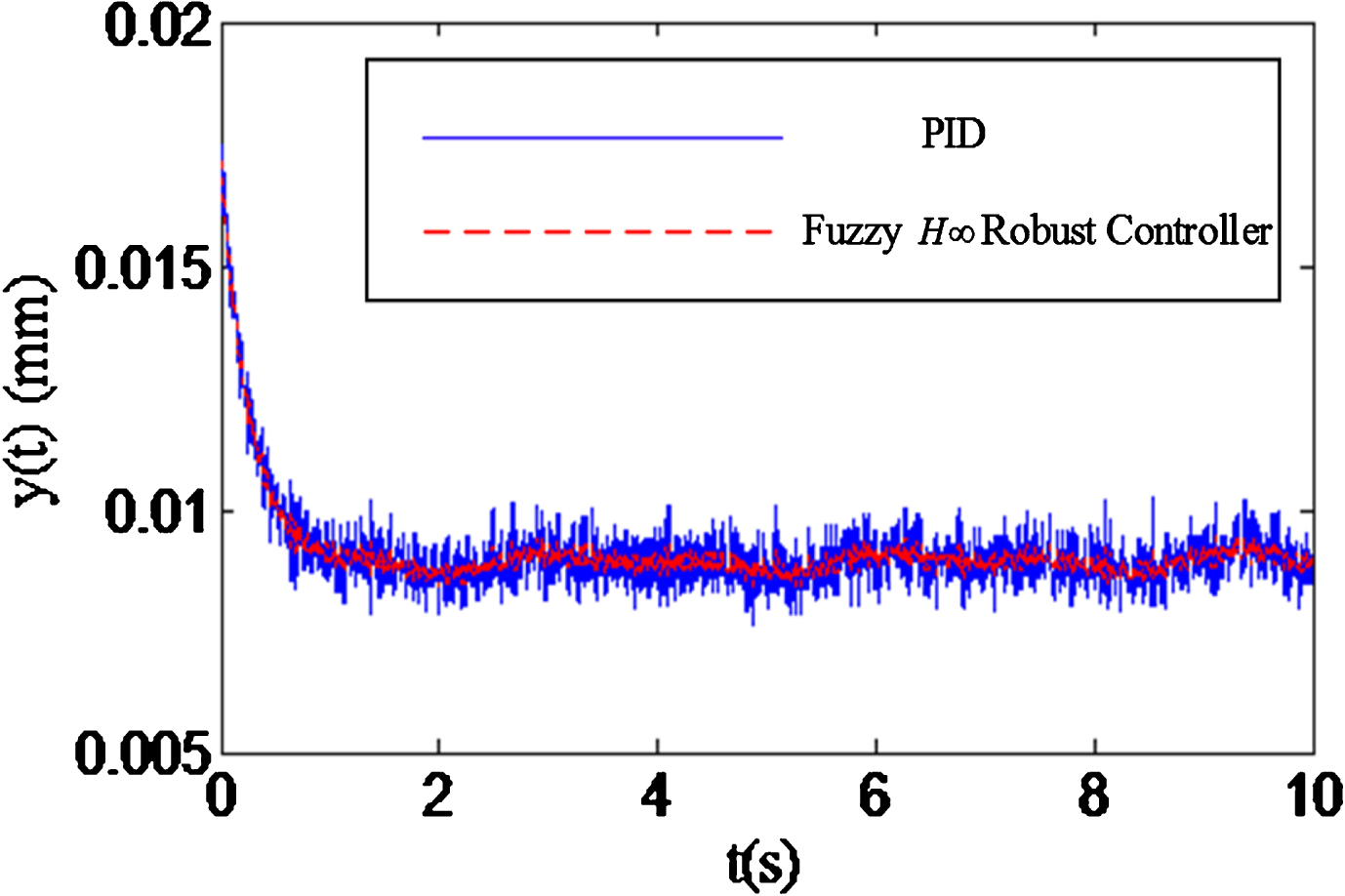
When the parameters of the magnetic levitation system change, the traditional PID controller has a slower response speed, a large overshoot, and chattering, which reduces stability and robustness of the system. In this paper, in order to solve these problems, H∞ robust control method with high robust performance is applied to the control of magnetic levitation system based on T-S model. Fuzzy control and H∞ robust control method are combined to develop a fuzzy H∞ robust controller for magnetic levitation system based on T-S model. This algorithm makes maglev vehicle suspension airgap stable, and has faster response speed and stronger robustness when the model parameters change and external disturbances exist. By solving linear matrix inequalities, a fuzzy H∞ robust controller is obtained, and the stability of the system is proved by Lyapunov method. Through the experimental platform, the experimental results comparison of PID controller and fuzzy H∞ robust control are included to verify the validity of the theoretical analysis and control method. The main advantage of the proposed controller is that it has more excellent stable suspension effect in the magnetic suspension system facing parameters change and exogenous disturbance. Due to the high rigidity of the existing magnetic levitation guideway, the study in this paper is based on the taking the guideway as a rigid body. Our future works will study the intelligent magnetic levitation control method with flexible guideway, which can reduce the requirement of guideway stiffness and thus greatly reduce the cost of guideway laying.
Footnotes
Acknowledgments
This research is supported by the National Key Technology R&D Program of the 13th Five-year Plan, Research on Key Technologies of Medium Speed Maglev Transportation System (2016YB1200601) and The Fundamental Research Funds for the Central Universities.