
Abstract
One of the challenges for the fault feature extraction of a planetary gearbox is that the weak gear fault related vibration feature is often buried by the strong background noise in the gearbox. The minimum entropy deconvolution (MED) method for weak impulsive feature enhancement has been successfully applied to the feature extraction of gears and bearings in fixed-axis gearboxes. However, it is often failed if the result is converged to a single pulse rather than a periodic pulse sequence which corresponding to the gear or the bearing localized fault. In order to address this issue, the multipoint optimal minimum entropy deconvolution adjusted (MOMEDA) is employed in this paper to extract the vibration feature related to an individual planet gear with tooth-crack fault in a planetary gearbox. The effectiveness and advantages of the method are verified by experiments.
Keywords
Introduction
Planetary gearboxes are widely used as the transmission units of wind turbines, helicopters and many mechanical systems with the unique advantages such as light weight, small volume, large transmission ratio, high load capacity, and high transmission efficiency. However, they are often utilized in low-speed, heavy-duty etc. Tough working situations, which make the teeth faults of planetary gear sets are often reported in literature. Planetary gearbox becomes one of main monitoring objects in condition monitoring and faults diagnosis. However, it has been a huge challenge for the vibration analysis of planetary gearboxes. Some difficulties for the vibration based faults diagnosis of planetary gearboxes are listed as follows.
Firstly, it is difficult to analysis the vibration acquired by the sensor since there are multi-sources coupled in a planetary gearbox, where the vibration is composed of not only the meshing vibration from each planet gear and the ring gear, but also the meshing vibration between the sun gear and each of planet gears. Secondly, the vibration transmission paths between the vibration picker and each meshing point are time-varying due to the rotation and revolution of the planetary wheel, which makes conventional fix-axis gear processing approaches invalid. In addition, the time-varying speed and load cause the huge background noises and the vibration have significant non-stationary [1]. Then, how to effectively extract the localized gear fault features of planetary gearboxes become one of the difficulties in the field of planet gear sets fault diagnosis.
Recently, a new modle-based impulsive wavelet has been constructed and applied to the sparse representation for impulsive feature detection [2]. An improved kurtosis was proposed and used to adaptively detecting the transient of fault wind turbine planetary gearboxes [3]. A universal equation of a gear profile that is in reference to the actual process of manufacturing is presented to improve the meshing stiffness model for a cracked tooth [4]. As well known that the minimum entropy deconvolution (MED) [5–7] can be used to extract the impulsive components [8] included in an observed mixture and eliminate the effect of the transfer path by the blind deconvolution of the mixtures. After the MED, the localized faults of gears or rolling element bearings related impulse trains can be extracted from the mixtures [9, 10]. Endo [9–11] used the MED for noise reduction in incipient gear fault diagnosis, extracted the corresponding periodical impact caused by the localized fault in strong background noise and a better result has been achieved.
However, the conventional MED has several disadvantages, which are listed as follows. Firstly, the MED uses the maximum kurtosis value as the termination condition in its iterative algorithm. However, occasional occurred unknown random impulses may interference the feature extraction results. Then, only a meaningless single pulse has been extracted by the MED [12], rather than the periodic impulses train caused by the localized faults of gears and rolling bearings. Secondly, the MED requires an iterative method to obtain an optimal filter, which is usually unable to be calculated with high efficiency [12].
In order to address the above limitations of the MED, Cabrelli [13] proposed an optimal minimum entropy deconvolution (OMED) in 1984. This method is similar to the MED, except that it does not require an iterative process, but it is also suitable only for single pulse extraction. In 2012, McDonald [14] proposed a maximum correlated kurtosis deconvolution (MCKD). Although this method partially solves the need for periodic pulse deconvolution extraction, it is still an iterative process.
In order to solve the limitations of MED, OMED, MCKD applied to rotating machinery, McDonald [12] proposed a so-called multipoint optimal minimum entropy deconvolution adjusted (MOMEDA) approach, which uses a designed target vector to define the position and weight of the pulse in 2017. It is suitable for the periodic pulse sequences caused by localized faults such as gears and bearings and this method is a non-iterative optimal solution approach and filters the signals directly.
To address the problems caused by strong background noise and time-varying transfer path of vibration signals in planetary gearboxes, a localized fault feature extraction scheme for the vibrations generated by planetary gearboxes is proposed in this paper and the effectiveness of the proposed method has verified by experiments.
Briefs on MED
The MED is a type of system identification method and originally introduced by Wiggins [15]. It is effective in deconvolving the impulsive components from a mixture of signals [16, 17]. In essence, it is realized by searching for an optimum set of filter coefficients with the maximum value of kurtosis. Then, after the input signal passed the MED filter, the output signal will have the strongest impulsive components, which make the MED a powerful tool in the faults diagnosis of rotating machinery for increasing the faults related weak impulsive features. For example, it is utilized to enhance the impulsive components arising from localized faults of gears [15] or bearings [10].
In theory, if a localized fault occurred in a gear or a bearing, the corresponding vibration observed by a vibration sensor can be expressed as in [18] by,
where x (n) is the observed vibration, y (n) denotes the impulse train generated by the localized fault, e (n) represents background noise, indicates the transfer function of the vibration transmission path. Due to the damping effects of the working environment and the vibration transmission path, the impulsive feature of y (n) will be attenuated greatly, which makes the entropy of x (n) has a larger entropy than that of y (n). Deconvolution in the MED is to find an inverse filter f (n), recover input y (n) [8] from output x (n) [12], which can be given by
Assuming
The essential of the MED technique is to find the optimal inverse filter f (n) to obtain the maximum of
According to Equation (2):
where L is the length of f (n) Calculate derivatives on both sides of Equation (5),
Then,
Equation (7) can be expressed as matrix,
Where
According to Equation (8), the matrix of inverse filter can be calculated by
Main steps of the minimum entropy recursive iterative algorithm are shown in Fig. 1.
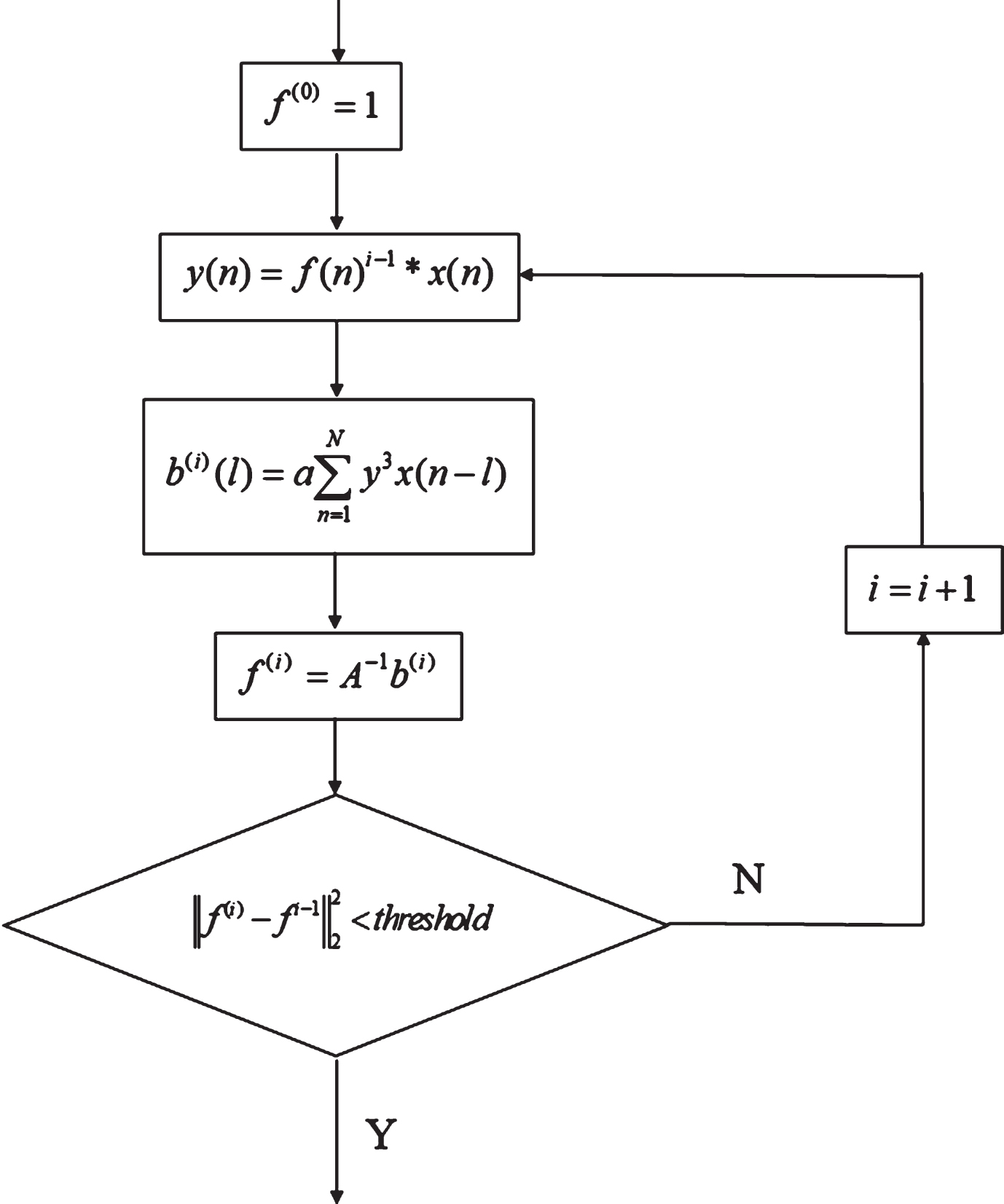
The steps of the MED technique.
The verification of MED will be introduced in section 5.
In 1985, a criterion [13] for impulse deconvolution has been proposed, named the D-norm, and verified the deconvolution problem with geometry. The D-norm deconvolution problem can be solved by an exact non-iterative solution method. A multi-impulse target recognition deconvolution algorithm is proposed in [12], which mainly applied to fault feature extraction of periodic impulses based on multiple D-norm (MDN). In order to overcome the drawbacks of the MED in extracting impulsive features, McDonald [8] proposed the so-called multipoint optimal minimum entropy deconvolution adjusted (MOMEDA) approach, which can be used to deconvolve multiple impulsive targets by using prior-known feature frequencies at known positions. The corresponding formula is given as in [12] by
The method introduces a target vector
where the target vector
In Equation (13), taking the derivative with respect the filter coefficients f = f1, f2, … f
L
, the max MDN can be solved, which can by expressed as in [10] by
According to Ref. [10]
Then, Equation (15) can also be rewritten by
After simplified:
the Equation (18) can be simplified to
and
With
As a result, the filter coefficients can be calculated by
and the output of the MOMEDA can be achieved by
where
For a gear or bearing localized fault, it will generate a periodic impulse train. Assuming T represents the period of the impulse train, then the target vector
where t
n
is the nth element of the vector
It worth mentioning that to enhance the deconvolution ability of the MOMEDA for extracting periodic impulses at a higher noise level, the so called multi-point kurtosis is introduced in [12], which is given by
where k is the normalization factor [9], and defined by
When the output is the same as the target vector
Then, the normalized multi-point kurtosis is defined by,
This definition is also based on kurtosis, but its target vector is expanded to multiple pulses at the controlled location, and is further normalized. In fact, there may not be only one periodic impulse that corresponds to the localized fault in rotating machine. When the multi-point kurtosis reaches the maximum, the number of corresponding samples is the fault period, and it may be an integer multiple or half-time of the period. Therefore, the multi-point kurtosis can distinguish between the fault period and the surrounding non-faults, where the multi-point kurtosis and the number of samples are all dimensionless quantities.
As above mentioned that the MOMEDA approach can be employed to extract the localized fault caused impulsive components in the application of condition monitoring and faults diagnosis. It mainly aims at extracting the fault features of rotating machine with known structure parameters and speed. For example, to extract the fault feature of the gear, the fault related frequency feature or the period of the impulses train can be known in advance, which can be calculated by the pre-known gear tooth number and its measured rotation speed by a tachometer. Subsequently, the target vector
Although the impulsive feature enhancement by the MOMEDA for the localized gear faults can be find in [11]. However, it is still limited to fix-axis gearboxes. Its application on the planetary gearbox is few reported. Since the vibration from the planetary gearbox is more complex than that from the fix-axis gearbox, it is worth an investigation on the MOMEDA for the localized planet gear fault feature extraction. In this paper, the MOMEDA for the tooth crack of planet gear is studied. A scheme of fault feature extraction of planet gear based on MOMEDA is proposed in the paper, which is shown in Fig. 2. The main steps of the scheme is listed as follows.

Fault Feature Extraction of Planet Gear Based on MOMEDA.
Firstly, the target vector
Subsequently, the filter coefficients
Moreover, the MOMEDA is performed to extract the may exist impulsive feature.
Then, the envelope analysis is carried out to expose the periodic components included in the extracted vibration.
Finally, the result of envelope analysis is compared with that from the normal state. If the localized fault of planet gear occurred, higher peaks will be found by taking the result from the normal condition as the baseline.
To show the effect of the MOMEDA, simulations are carry out by the conventional MED and the MOMEDA at first. One simulation is introduced as follows.
An impulse response is simulated by s = [–0.05 0.1 –0.4 –0.8 1 –0.8 –0.4 0.1 –0.05], and then an impulse train without and with interferences generated with a period of 50 points are shown in Fig. 3 (a-c), respectively. Note, the simulated white Gaussian noise is 25dBW. The simulated observed signal is given by,
where h is the simulated harmonic signal, fault represents the simulated fault impact sequence, and noise denotes the Gaussian white noise signal. In addition, it is worth mentioning that the data point number is used to describe the period in the following, which is more convenient for the its using in the MED and the MOMEDA.

MED process (a)Fault signal (b) Fault signal contains noise (c) Harmonic signals including noise and fault signals (d) Noise reduced signal after MED.
The conventional MED approach is applied on the simulated signal at first. The noise reduced signal after the MED with the filter length 1000 points and the iterative number 20 is shown in Fig. 3(d). However, where only one prominent pulse can be found in the plot. And it is noted that the extracted waveform is not matched with the periodic impulses shown in Fig. 3(a). The periodic impulsive feature extraction is failed. The reason is that the MED solution is an iterative process. The fault indicator may depend on the termination condition. In some cases, the resulting periodical fault signal is extracted under an earlier termination condition [12], which may not meet the best solution.
By using the MOMEDA to analyze the same simulation signal, the multi-point kurtosis value is shown in Fig. 4(a) and the output after the MOMEDA is shown in Fig. 4(b), 4(c) is the obtained optimal filter with order 1000. According to the fault characteristic period 50 points, select set T search range of 40∼60 points with the step T = 0.1.

MOMEDA process (a) Multipoint Kurtosis (b) Best output signal (T = 50point) (c) Best filter (T = 50point).
It is cleared that the result obtained by the MOMEDA is almost the same as the original periodic impulses shown in Fig. 3(a).
Comparing the simulation results from the MED with that from the MOMEDA, it can be noted that only few impulses are obtained by the MED in this simulation, while the interesting impulse train can be achieved by the MOMEDA. It claims that the MOMEDA is super to the conventional MED in extracting periodic impulsive characteristics corresponding to localized faults of gears and rolling element bearings.
In this paper, the planetary gearbox used for testing consists of a sun gear, 3 planet gears, a ring gear, and a planetary carrier. The ring gear in the gear-box is fixed and this is where the planetary gearbox is different from a general fixed shaft gearbox. When the planetary gearbox is running, the sun gear spins around the fixed shaft, and the planet gear orbits the planetary shaft and not only rotates but also revolves around the sun gear. While the planet gear teeth mesh with the sun gear and the ring gear at the same time, vibration is superimposed on each other, so that the signal will be complicated. In this case, the relative position between mesh points (i.e. the mesh point of sun gear and planet gear as well as the mesh point of planet gear and ring gear) and sensor changes with the rotation of the planet carrier. This change will cause amplitude modulation due to the impact caused by planet gear tooth fault [19].
Influence of transmission path on vibration signal
According to reference [20], Fig. 5 shows that the position where the sensor is fixedly installed above the ring gear with the shortest vibration transfer path. In this situation, the impact vibration signal caused by the planet gear tooth fault reaches the sensor roughly through three paths. The first path (i.e. the vibration signal which is generated when the fault tooth meshes with other gears is transmitted from the mesh point to the ring gear, and then reaches the sensor through the box.) is shown in Fig. 5(a). The second path (i.e. the fault impact is transmitted to the sun gear through the mesh point, then to the support bearing through the shaft which is connected to the sun gear, and finally to the sensor by the bearing seat and the box.) is shown in Fig. 5(b). The third path (i.e. when the fault tooth passes through the mesh point, the vibration signal is transmitted to the planetary bearing first, then to the planet carrier through the planetary bearing, then to the support bearing through the shaft connected to the planet carrier, and finally to the sensor through the bearing seat and the box.) is shown in Fig. 5(c).

Transfer paths of planet gear fault induced vibration signal (a) Transfer path 1 (b) Transfer path 2 (c) Transfer path 3.
In the first path, the meshing vibration of a planet gear is not only generated by the meshing with the sun gear, but also the meshing with the ring gear. Although in one rotation period of the planet carrier, the planet gear with tooth fault will mesh with the sun gear and the ring gear, respectively, and the two engagements each generate an impact, two meshing impact were thought of the same kind of impact. In addition, compared with the second and third paths, the first transfer path has the shortest distance and fewer passing media, so in the first transfer path, the vibration signal contains more planet gear tooth fault information.
In general, the above three transfer paths will periodically change with the running of the planetary gearbox, and this periodic change will cause amplitude modulation or frequency modulation.
There are many kinds of modulation in the vibration in a planetary gearbox, which make the corresponding sidebands in spectral plots are complex. For a planet gear with a localized tooth fault, the meshing frequency f
m
[7] can be calculated by,
where, f
m
, f
c
, f
p
, fs denote the meshing frequency, the carrier, the planetary gear and sun gear rotation frequencies, respectively. And
where
According to Ref. [8], by defining the period point as T
f
. If the sampling rate is F
s
, then the fault periods is
where T f denotes the sampling period of the fault. For the appearance of the non-integer period T, it can be rounded to the nearest position.
Instruction on test rig
To verify the validity of the MOMEDA on signal from planetary gearboxes. Experiments on a planetary gearboxes transmission system is carried. The test object is a NGW planetary gearbox mounted on the test rig, which is shown in Fig. 6. Parameters of the NGW planetary gearbox are shown in Table 1. The vibrations under the normal and abnormal conditions are picked up respectively. In the abnormal condition, a tooth root crack about 4 mm is cut artificially on a planet gear tooth, which is shown in Figs. 7 and 8. Three acceleration sensors (DH112 with a sensitivity of 5.20 pC/g) are mounted on the planetary gearbox for observing the vibration, which are shown in Fig. 6 labeled with 3, 4, and 5. The sampling frequency used in the experiment is 51.2 kHz. The signal selected for analysis is from the acceleration sensor mounted above the ring gear. The DH904 eddy current sensor is mounted opposed to the input shaft to the sun gear with a sensitivity of 2.5 V/mm for obtaining input shaft tacho impulses. The actual speed is calculated from the tacho impulses, which is about 1000 rpm.
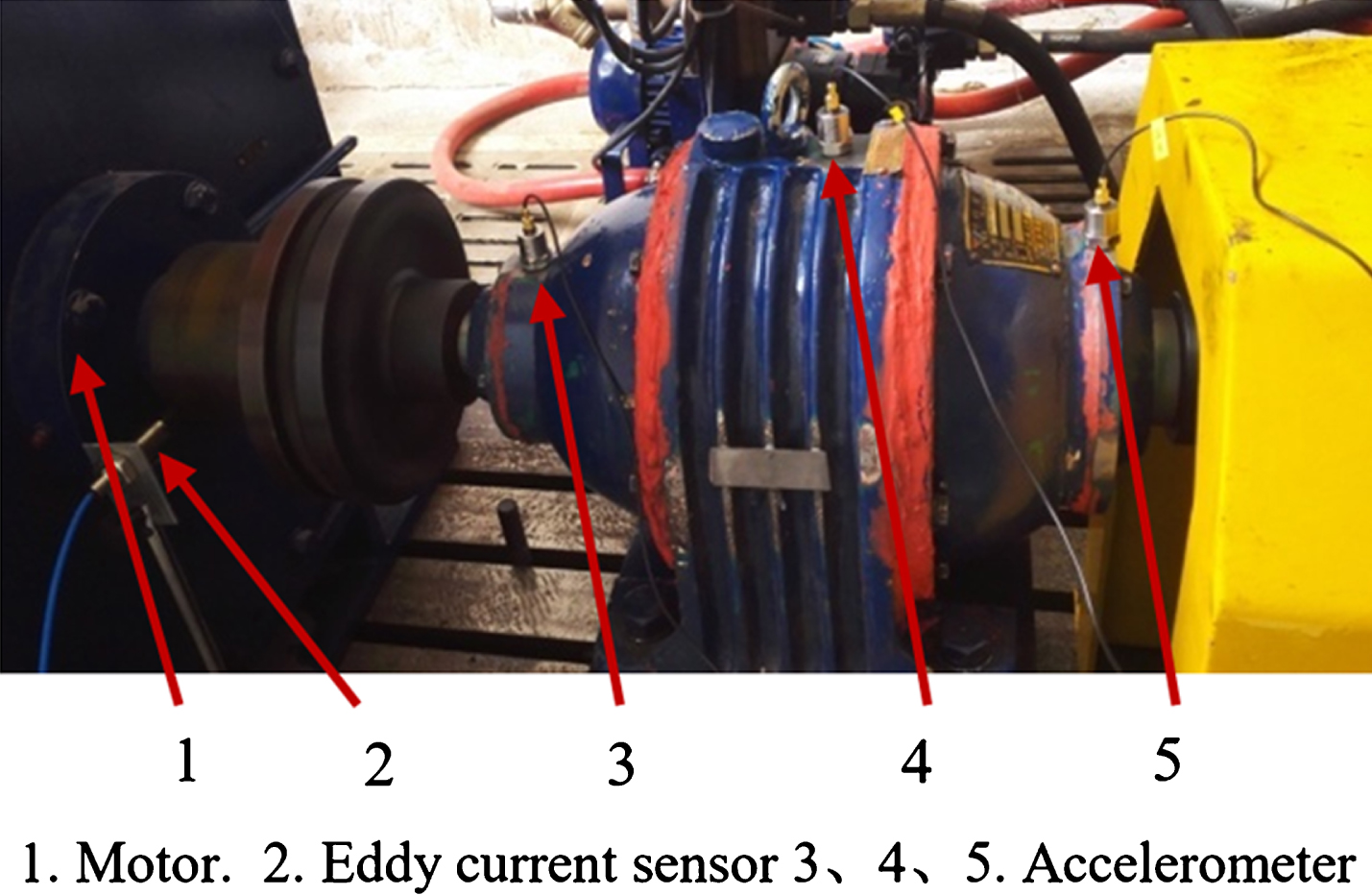
Test rig of planetary gearbox transmission.

Planet gear with tooth root crack.

Fault tooth local amplification.
Parameters of planetary gearbox
According to the planet gear train theory and the experimental input speed 1000 rev/min, characteristic frequencies of the gearbox can be calculated by Equations (34 and 35), which are listed in Table 2.
Characteristic frequencies of the planetary gearbox
By down-sampling the raw data to 12800 Hz, the planetary gear fault characteristic period (sample point calculation) can be obtained according to Equation (36). Then, T
f
is
In this paper, we compare the extraction results of a single planetary gear under the normal conditions with the abnormal conditions to verify the effectiveness and advantages of this method for the extraction of planetary gear fault features.
Original signal
The vibration observed on the trouble-free planetary gearbox is used as the baseline for the comparative analysis of the planet gear tooth root crack fault. The waveform of the time domain is shown in Fig. 9. The vibration signal captured on the gearbox with the faulty planet gear is shown in Fig. 10.

Normal vibration signal.
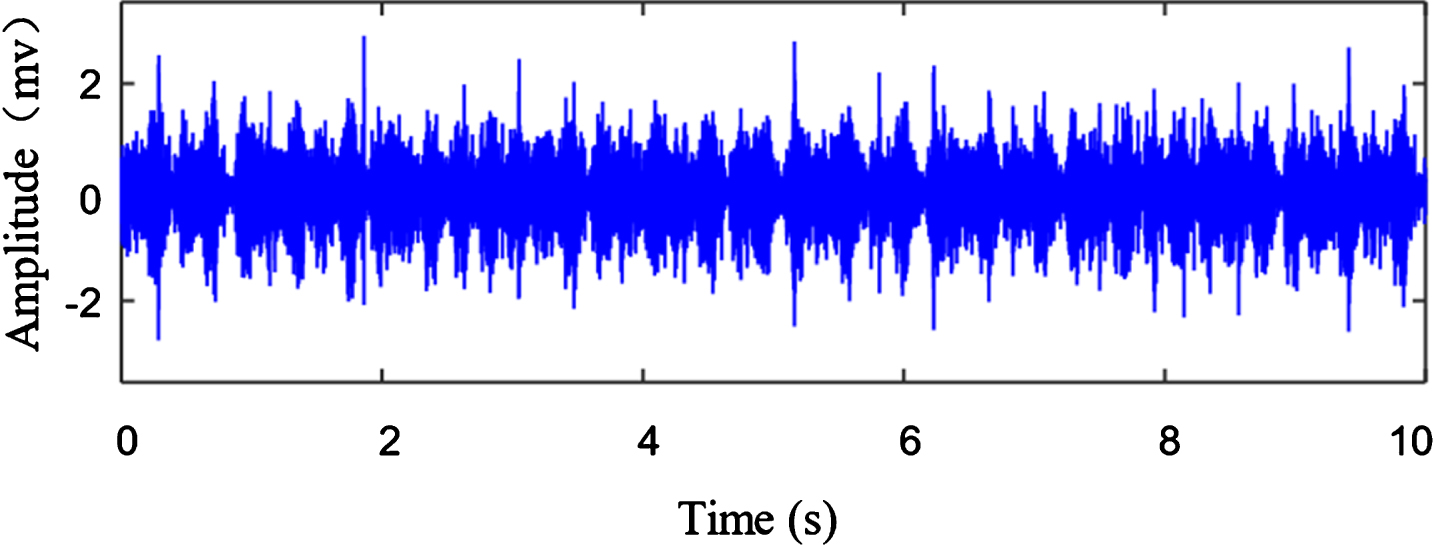
Planet gear fault signal.
The MOMEDA is used to extract the fault features of the original signals of the normal state and the planet gear fault state, and the multi-period kurtosis value obtained is shown in Fig. 11.
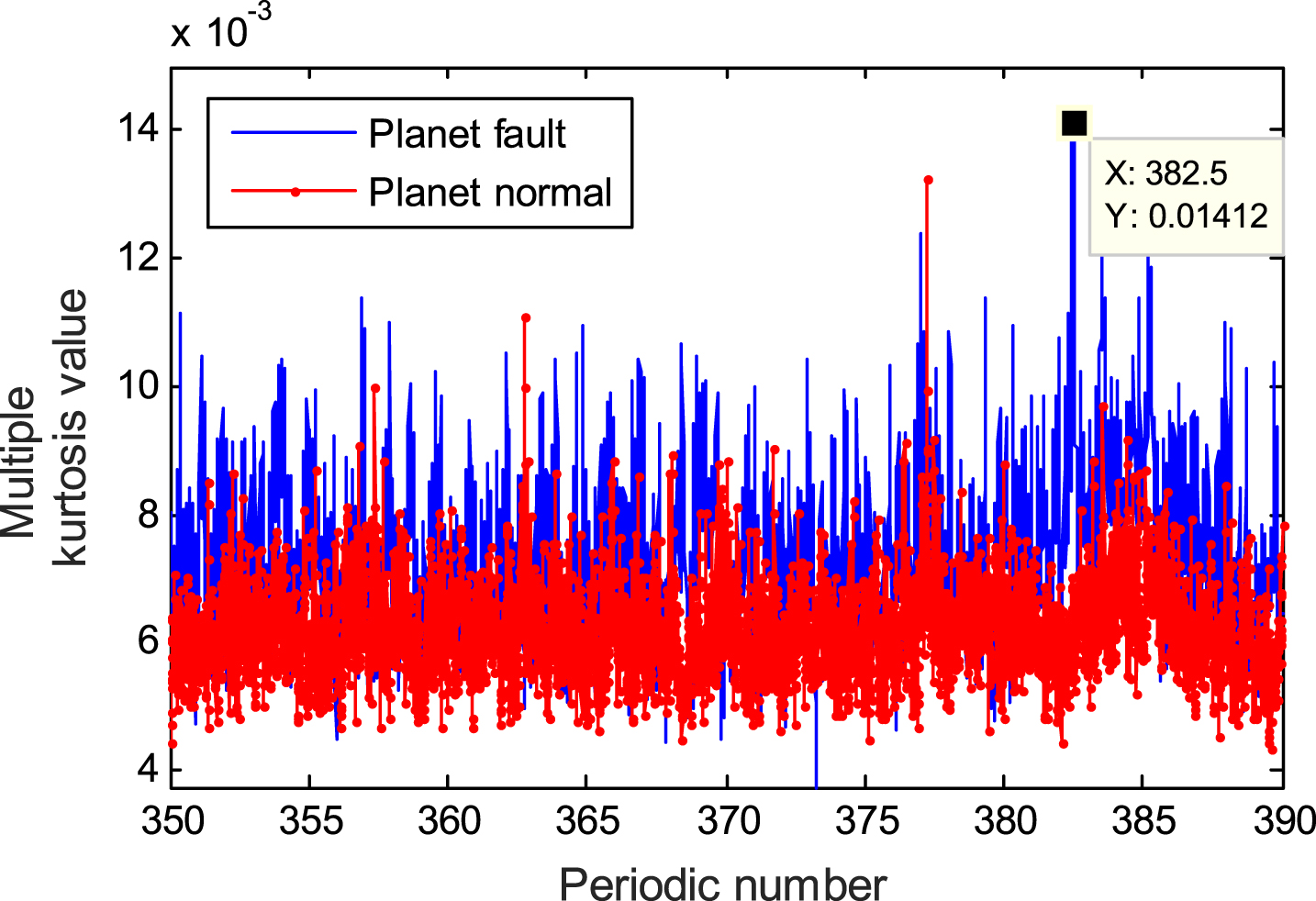
Normal and fault state MOMEDA Mkurt.
Within the selected range, the maximum value of the multi-period kurtosis value reached in the planetary gear fault state is 382.49 point corresponding to the characteristic period of the fault state. For the normal state, the value of the periodicity of fault features in the multi-period kurtosis value obtained is smaller and the maximum value obtained is the other periodic components. The comparison shows that the fault state is different from the normal state.
The results of the normal signal extracted by the MOMEDA are shown in Fig. 12(a), and the envelope analysis result of the extracted signal is shown in Fig. 12(b).
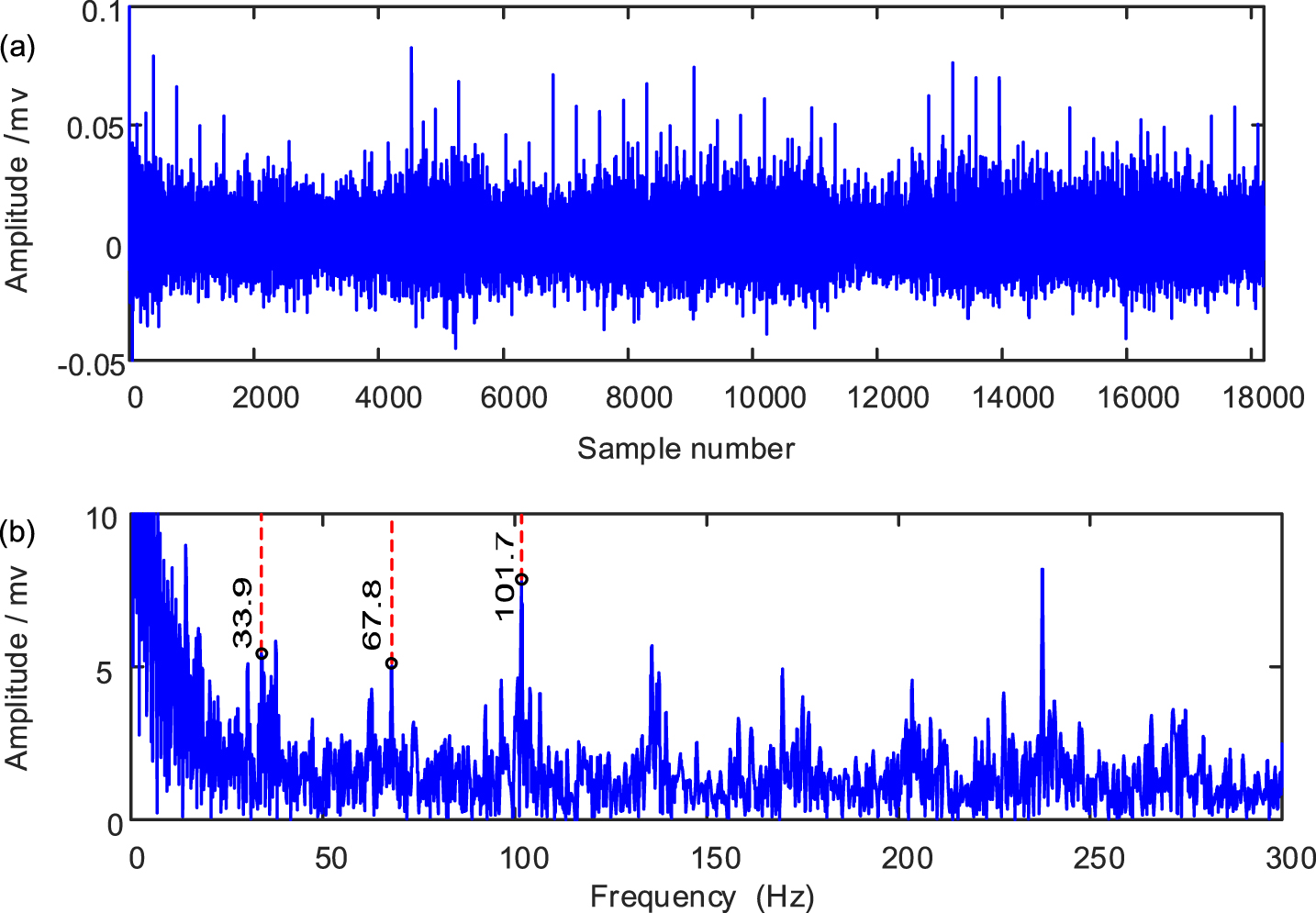
(a) Extracted signal (T = 377.28point) and (b) Envelope spectrum(normal condition).
The signal extracted from the normal state signal has a characteristic period of 377.28 points, which does not correspond to the fault characteristic period. The corresponding frequency calculated according to equation (36) is 33.93 Hz, but the frequency does not correspond to the fault characteristic frequency. Its envelope spectrum is shown in Fig. 12(b), it can be seen that its frequency component does not correspond to the fault characteristic frequency and does not stand out.
The results of the extraction of the planet gear fault signals by the MOMEDA are shown in Fig. 13(a), and the envelope analysis results of the extracted signals are shown in Fig. 13(b).
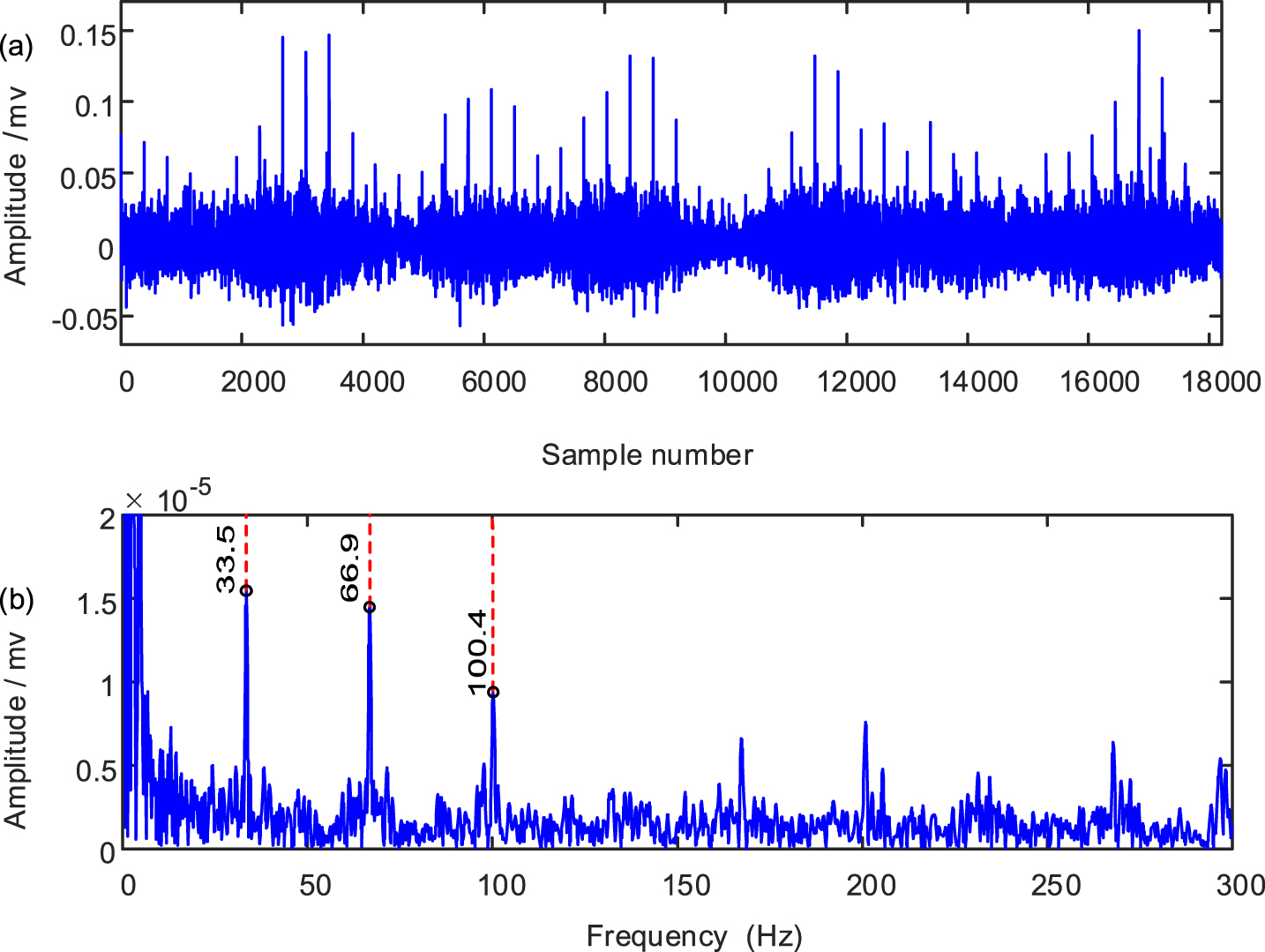
(a) Planet gear fault extracted signal (T = 382.49point) (b) Envelope spectrum.
According to the fault signal of MOMEDA, the pulse period is 382.49 points corresponding to the fault period, and the corresponding frequency is 33.46Hz according to Equation (36), and to the frequency of the envelope spectrum is 33.46Hz, which is corresponding to the planetary gear failure characteristic frequency. Comparing the extraction result of normal state and fault state can illustrate the effectiveness of this method in extracting the fault feature of planet gear.
In this paper, MOMEDA, an improved method of MED, is applied to the fault feature extraction of planetary gearboxes.
A MOMEDA based scheme is proposed for the fault feature extraction of planetary gearboxes, which has following advantages: The method avoids the shortcomings of the MED method, which are the characteristics of the fault impact sequence of the planetary gearbox vibration and the time-varying vibration transfer path of the planetary gearbox. The method can effectively extract the fault impact sequence and verify the effectiveness of the method and the advantages of fault feature extraction for the planetary gearbox through the comparison test between normal and fault. The method can extract the envelope from fault signal, and the planetary gearbox fault diagnosis can be performed by comparing the obtained frequency with the characteristic frequency.
The experiment results positively support the proposed scheme.
Footnotes
Acknowledgments
This work is supported by National Nature Science Foundation under Grant no. 51675251, 51465021.