
Abstract
The probabilistic fuzzy set (PFS) is designed for handling uncertainties with both fuzzy and stochastic nature, so the probabilistic fuzzy logic system (PFLS) has the ability to handle more complex uncertainties in process. In this paper, the general probabilistic fuzzy set is proposed, and the convergence analyses of its secondary probability density function (PDF) are conducted. It discloses the distribution regularity of membership degree in general PFS, which improves the information and interpretability of PFS. Then, according to convergence, a new method to tuning parameters for PFLS is proposed. This method avoids the parameters into local inefficiency, and also reduces the number of learning parameters in PFLS. Last, the new tuning method is applied to the electromyography (EMG) robots modeling problem. The comparison shows that the probabilistic fuzzy logic system based on general PFS (GPFLS) can achieve a simple modeling process, and also, it improves the learning speed compared to PFLS. The work presented will improve the potential application of probabilistic fuzzy logic system.
Introduction
Type 1 fuzzy set [1] can deal with fuzzy information especially the uncertainties related the linguistics. Then type 1 fuzzy logic system is proposed [2, 3], it is powerful to handle uncertainties in fuzzy nature, and it has been widely applied in various fields, such as control [4, 5] and modeling [6]. In type 1 fuzzy set, the crisp membership grade is used. Yet different words mean different people, just as variance provides a measure of dispersion about the mean, a fuzzy set also needs measure of dispersion to capture more about linguistic uncertainties, so type-2 fuzzy set is introduced by Zadeh [7]. Type-2 fuzzy set blurs the boundary of type 1 fuzzy set (FS) [8], the membership degrees in Type-2 fuzzy set are fuzzy set, which makes it able to capture more complicated uncertainties in process. Based on type-2 fuzzy set, the type-2 fuzzy logic system is developed [9]. It improves the ability to handle inexact information, and so far it has been successfully applied in many fields such as modeling and control [10, 11]. Later, in order to simply the type 2 model [12], researchers propose interval fuzzy sets, whose membership degree is defined as interval sets. The related interval fuzzy logic system [13–15] is designed with the ability to reduce the calculation complexity. Unfortunately, the two-dimension membership function in type 2 and interval fuzzy set still remains fuzzy, they are both used as the description of the same variable, this may limit their application potential to a process that contains random uncertainties. So it would be valuable to integrate the probability theory with the fuzzy theory [16–18].
In recent years, the integrate strategies about probability and fuzzy theory have been studied. In early, Zadeh [7] introduced probability into fuzzy set, yet it is just assuming the membership degree is a random variable obeying Gaussian distribution. In 1920, M.Jaroszewski [19] proposed nonstationary fuzzy set, whose membership degree shows the time-dependent distribution characteristics. Later the important concept, such as fuzzy random set [20] and fuzzy random variable [21, 22], introduced the fuzzy theory into the statistical framework, which is able to deal with situations where the outcomes of a random experiment are modeled by fuzzy sets. Note that the membership degree in these sets is not a single value, yet becomes the random variable. However, the random variable of membership degree in above sets still remains at the conceptualization stage, yet there is no reasonable inference for its distribution regularity.
Recently, the probabilistic fuzzy set was proposed by introducing probability theory into fuzzy set framework [23]. It changes the secondary MF of type 2 into the probability density function (PDF), so it is able to capture the random uncertainties in membership degree. Thus it improves the measure strength of the dispersion of people’s view on some problem. The membership degree in PFS becomes a random variable described by the secondary PDF, so it has the ability to capture uncertainties with fuzzy and random nature. Then the probabilistic fuzzy logic system is proposed, it improves the ability to handle random uncertainties. In recent years, it has been applied for stochastic modeling and control [23, 24], function approximation problem [25, 26], classification [27] and so on. The PFS gives a systematic build and deduce the expression of secondary PDF, yet because of the complexity nature of secondary PDF in PFS, its convergence has not been studied. This leads to the complex calculation during inference in PFLS. So understanding about random properties of secondary PDF is beneficial to us to get more information about PFS, this maybe simplify the calculation when probabilistic fuzzy set is applied in industrial process.
In this paper, the general probabilistic fuzzy set is proposed. The convergence analyses of its secondary PDF are investigated, which discusses the secondary PDF weather a unimodal distribution model (this is one of the most common distribution) or other types. The revelation of distribution regularities of the membership degree improves the information and the interpretability of PFS. Moreover, based on convergence, a new method of tuning parameters for PFLS is proposed. This method can avoid the parameters into local inefficiencies, and reduce the number of parameters in PFLS; At last, the general PFS is applied to the EMG robots modeling problem. It is shown that general PFS can achieve a simple modeling process compared to ordinary PFS in PFLS.
This paper is organized as: In Section 2, the general probabilistic fuzzy set is constructed, and its convergence analyses are conduced. Then a parameter learning method is proposed. In Section 3, the parameter learning method is applied to EMG robots modeling problem. Finally, the conclusion is given in Section 4.
Materials and methods
The probabilistic fuzzy set
The concept of probabilistic fuzzy sets has been proposed by introducing probability into the traditional Gaussian fuzzy set. The Gaussian fuzzy set is the primary membership function in PFS, it is expressed by the Gaussian function following
The PFS considers the random variation from the center of the traditional Gaussian fuzzy set. The fuzzy membership grade in PFS becomes a random variable, it is described by the probability density function following
The probability density function (3) is also called the secondary PDF. In PFS, the fuzzy dimension is described by Gaussian fuzzy set, and the probability dimension is described by secondary PDF as shown in Fig. 1 (a) and (c). So it is able to handle the information with both fuzzy and stochastic uncertainties existing in the process.

(a): The probabilistic fuzzy set in continue case; (b): Fuzzy MF in the general probabilistic fuzzy set for the perturbed width; (c): The probabilistic fuzzy set in discrete case; (d): Triangular primary MF in general probabilistic fuzzy set.
However, the secondary PDF (3) in PFS is so complicated that its convergence will not been studied. When learning parameters, the secondary PDF in PFLS may be into local inefficiency. In real life, there are random variables with various types of distribution characteristics, and unimodal distribution is the most common type. We hope to know the distribution regularity of membership degree of PFS, which can help us to get more information from original data and reduce the calculation complexity of inference in PFLS.
According to the above problems for probabilistic fuzzy sets, a new probabilistic fuzzy set (general probabilistic fuzzy set) is constructed, and its convergence is studied.
The construction of general probabilistic fuzzy set
In this general probabilistic fuzzy set, the primary membership function is expressed by a triangle function, it is constructed as follows.
By simplifying, one has
With introduction of absolute value symbol, the primary membership function (6) can be obtained as
To obtain the secondary PDF, the normalizing of the width of triangular membership function is considered. Based on the central limit theorem in statistics, in the process of repeatedly extracting samples that follows the normal distribution, if the samples number n is large enough [28], the distribution of mean of these samples will gradually approach to the normal distribution.
So when considering the random variation from the width ξ of triangle fuzzy set, the width ξ in Equation (6) can be regarded as a random variable following the normal distribution
Accordingly, shown as in Fig. 1 (b), the fuzzy degree u becomes a random variable U = - |x - c|/ξ + 1, which is followed a distribution. Its probability distribution function can be obtained as
And the PDF called as secondary PDF in general probabilistic fuzzy set is
The detailed proof of Equations (8) and (9) is given in Appendix A.
Probabilistic fuzzy set is very important for system parameter learning in probabilistic fuzzy logic system, the convergence of its secondary PDF directly affects the system model complexity and approximation speed. Due to the complexity nature of secondary PDF, the inference in PFLS suffers from a large amount of computations. So in this section, the secondary PDF in general probabilistic fuzzy set is investigated, and a theorem is derived as follows.
Step 1: Considering the property of Equation (10): The secondary PDF only has one extreme point u1 in interval [0, 1], so the distribution regularities of membership degree present as unimodal curve.
Since |x - c| is a constant, suppose |x - c| = a and z = 1–u, then secondary PDF of U can be expressed as
And then, the first derivative of z is considered as
To find the extreme points, Φ (z) ′ = 0 can be considered as
By simplifying, one has
From Equation (14), it is obviously that Φ (z) has two extreme points
So that Φ (z) has two extreme values. To find the relationship between these two extreme values, the ratio Φ (z1)/ - Φ (z2) is considered. And this ratio of two extreme values can be obtained as
The detailed proof of Equation (17) is given in Appendix B.
To obtain the convergence, suppose k = ν/τ, then Equation (17) can be obtained as
Finally, the limit value is
Obviously, as k increases, Φ (z1)/ - Φ (z2) increases exponentially and will become very large, it is because that the left extreme value gradually decreases and almost disappears. On the other hand, as k decreases, it is Φ (z1)/ - Φ (z2) ≥ 1, so the right extreme point z1 always exists.
Plugging u = 1–z into Equation (18), the relationship between the fuzzy membership degree U and k can be obtained as
where
Thus, for Equation (10), the left extreme value gradually decreases and almost disappears, while the right extreme value always exists with adjusting parameter k as shown in Fig. 2 Part A.

Part A: The relationship between k and secondary PDF. Part B: (A) The shape of secondary PDF when u1 ≤ 0; (B)-(D) The shape of secondary PDF when 0 < u1 ≤ 1.
In addition, based on Equations (22) and (23), u2 > 1 can be obtained from 0 < a < 1, so the right extreme point u2 will be in the scope of u2 ∈ [1, + ∞]. Thus there is only one extreme point u1 in [- ∞ , 1], and the extreme value is obviously the maximum value in [- ∞ , 1]. In this way, the membership degree U is approximated by unimodal distribution.
Step 2: The secondary PDF (10) in general PFS can approximate several kinds of unimodal curve.
The maximum point u1 would move in [- ∞ , 1] with adjusting parameters ν and τ, thus it makes the secondary PDF (10) not only present a unimodal curve shape, but also several kinds of unimodal shape within different scope of parameters. There are mainly the following two cases: When meeting the condition (24), the extreme point u1 moves out of [0, 1] and is on the left of 0, so the secondary PDF degenerates into the shape in [0, 1] as shown in Fig. 2 Part B: (A).
When meeting the condition (25), the extreme point u1 moves between 0 and 1, so secondary PDF degenerates into several kinds of shapes in [0, 1], such as normal PDF, Gamma PDF and so on, which is shown in Fig. 2 Part B: (B)-(D).
Based on Theorem 1, we can obtain results as follows.
(1)Convergence and stability
In probability theory, there are different kinds of PDF to describe different types of random variables. Since most random variables obey unimodal distribution, so the unimodal curve is the most common type of PDF. The secondary PDF in general PFS can approximate several kinds of unimodal shapes, such as Gaussian PDF (Fig. 2 Part B: (C)), Gamma PDF (Fig. 2 Part B: (A) and (B)) or skewed distribution. So the general PFS with this kind of secondary PDF can be seen as a general model of PFS. With this general PFS, the difference between various PFSs consists just in the difference of parameter values, which avoids the difficult problem of a priori choice of PFS.
The general PFS has convergent secondary PDF. This can make PFLS avoid the parameter into local inefficiency when learning parameters. Moreover, the convergence can be used to improve the stability and learning speed of probabilistic fuzzy logic system.
(2)Interpretability and intuitively
In decision field, this situation may be come across: If a survey is conducted on randomly chosen 100 people to obtain their view as follows: what is the degree of 1.8 meters height people belonging to fuzzy set high, different people may have different viewpoint on this problem. According to statistics, the result is that 70% people give the same opinion about degree 0.9, yet 30% people give another opinion about the degree 0.6 [29]. That is to say, we can know most people’ opinion by statistic technology. In huge amount of data environment, usually we hope that most people’s opinion can be learned from the original data. Fortunately, based on Theorem1, the peak value of membership degree in the general probabilistic fuzzy set can be found, which makes us able to known most people’s views intuitively. For example, the membership degree of 1.8 meters height corresponding to fuzzy set high is a random variable, if it is assumed that this random variable is described by the PDF in Fig. 2 Part B:(D), since the peak of the curve in this Figure is 0.8, so it means most people think the degree of 1.8 meters height belonging to fuzzy set high is 0.8.
(3) The parameter relationship in secondary PDF
The u1 in the Equation (22) is transformed as
It is seen that the Equation (26) shows the detailed relationship between maximum point u1 of secondary PDF and parameters ν, τ as: When the extreme point u1 is u1 ≤ 0, it is When the extreme point u1 is u1 > 0, it is Since
The probabilistic fuzzy logic system based on general probabilistic fuzzy set
Compared to the ordinary probabilistic fuzzy logic system, the PFLS based on general PFS still contain three operations: fuzzification, inference engine and defuzzification as shown in Fig. 3. In PFLS, probabilistic fuzzy set is the base of the inference, yet in PFLS based on general PFS, the general probabilistic fuzzy set is used in the inference process.

The probabilistic fuzzy logic system based on general PFS.
These general PFS based rules are usually expressed as IF–THEN statement as
In defuzzification operation, PFLS based on general PFS is decomposed into large amounts of ordinary FLSs. The weight of each FLS is determined by secondary PDF, and then the centroids of each FLS are computed. Finally, the mathematical expectation of these centroids is the final output.
In probabilistic fuzzy logic system, since probabilistic fuzzy set is substituted for traditional fuzzy set and the PFS-based rule is employed, so the fuzzy theory combining probability method is used in defuzzification. This increases the complexity of the logic system. In actual application, not only the number of parameters increases, but also the learning and adjustment process are much complicated.
In order to reduce the complexity when designing parameters learning process of the probabilistic fuzzy logic system, the convergence of secondary PDF, and also the different effect of the mean v and standard deviation τ are employed. As shown in Fig. 4, the modeling step is designed.

The parameter design of probabilistic fuzzy logic system with general PFS.
The fuzzy-C mean algorithm clustering is used to obtain the centers c i and the width ξ i of Equation (6), where i = 1, 2, . . . , l, l is the number of the cluster partition.
Suppose v i = ξ i , where v i is the mean of width of triangle function (6).
Coarse-tuning: Based on Theorem 1, when K is increasing, the secondary PDF in general PFS can approximate several kinds of unimodal curve. So we fix the ratio K = v
i
/τ
i
≥ 5, and suppose v
i
= ξ
i
and
Fine-tuning: Based on the results v i and τ i in coarse-tuning in step 3, the global parameter searching and optimal is processed.
If RMSE < ɛ, stop; Otherwise going back to step 2.
Compared to the parameter learning method of traditional probabilistic fuzzy logic system, the proposed method has some advantages as The Gaussian function, which is the primary function in PFS, is replaced with Triangular curve in general PFS. This avoids the exponential growth, and reduces the calculation and computational complexity. In this method, parameter K is introduced according to the convergence of secondary PDF. It makes parameter learning process convergent, and also it avoids parameter into local inefficiency. The parameters learning process is at first coarse-tuning and then fine-tuning. In coarse-tuning, parameter K is introduced, so the parameter τ
i
can be determined by just tuning K. Thus the learning parameters are only K and v
i
in the logic system.
In this way, it reduces the number of learning parameters compared to the traditional method of probabilistic fuzzy logic system, so the learning process is simplified.
In this section, the GPFLS (The PFLS based on general PFS) is applied to EMG manipulator modeling problem. The new tuning method proposed in 2.3.2 is used to learn the parameters of GPFLS, so as to investigate its distinctive modeling capability under circumstance with random uncertainties.
At present, technologies relating to teleoperator manipulators have developed rapidly. Among them, the approach of applying bioelectrical signals, e.g. electromyography (EMG) signals, to control manipulators has become a research hot spot [30, 31]. EMG signals represent the superposition of action potentials of kinematic units in the contraction of muscles. The control technologies based on EMG signals extract features from the collected EMG signals, and then build the relationship between eigenvalues and control commands. So that operators can realize remote operation of manipulators. Such a control mode enables manipulators to be moved flexibly, and also allows human operators to control such robots/manipulators freely and conveniently [32]. These are generally substitutes for humans in operations in dangerous environments. Recently it has been applied in industrial and medicine [33].
Experimental scheme
The control of manipulators based on electromyography (EMG) signals included: controls of the grasping model and grasping force. In this paper, the grasping forces in the two grasping modes were estimated, the two grasping modes are: ball grasp and lateral pinch grasp, as shown in Fig. 5 (c) and (b). The grasp force decoding process of the manipulators based on the EMG signals mainly included: the data pre-processing, feature extraction, and force estimation, as shown in Fig. 5 (e). The detailed process is: the EMG signals under certain grasping mode were acquired by using the surface electrodes, and force signals were acquired by the force sensing resistors (FSRs) respectively. After carrying out data pre-processing and feature extraction, the model of the EMG-force relation was established to realize the force decoding. The FLS, PFLS and GPFLS were respectively used to establish the model of the EMG-force relation, so as to estimate the magnitude of the applied force and verify the validity of the GPFLS.
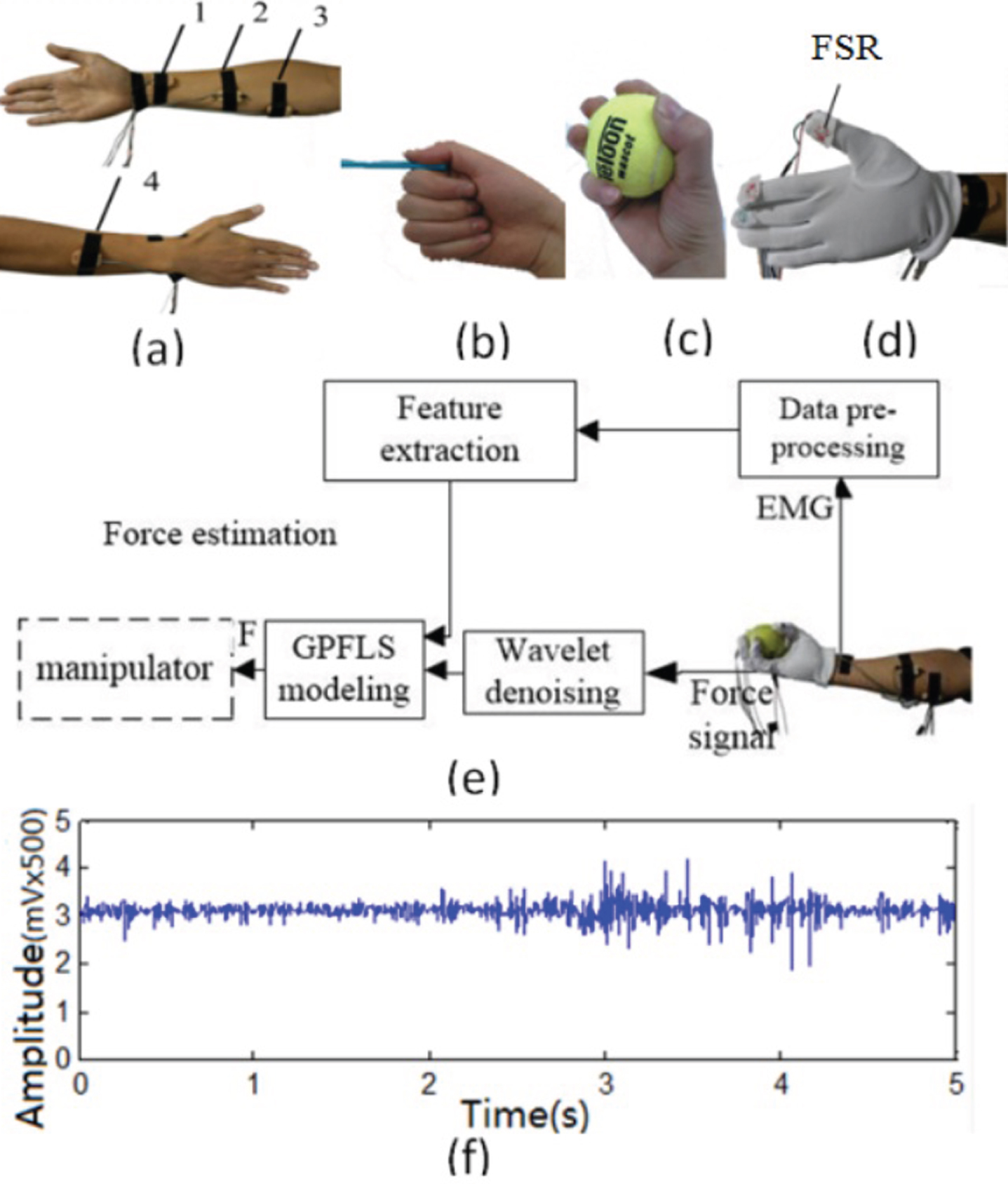
(a): Positions for installing the electrodes: 1-flexor pollicis longus; 2-palmaris longus; 3-flexor carpi ulnaris; 4-extensor digitorum; (b)-(c): Two grasping models: Ball grasp and Lateral pinch grasp; (d): FSRs fixed on the tips of the gloves; (e): Estimation process of the grasping force of the manipulator based on EMG signals; (f): EMG signals de-noised using wavelet method.
When collecting the EMG signals, we needed to select the positions for installing the electrodes. As the thumb plays a significant role in the grasping, when considering the grasping force, the muscular work that can reflect the activities of thumb should be collected. So the selected muscles included: the flexor pollicis longus muscle, the almaris longus, the flexor carpi ulnaris, and the extensor digitorum [34]. The installation positions of the electrodes are shown in Fig. 5 (a).
EMG signals were acquired using the dry surface electrodes. The independent dry electrode module integrates various processes, including pole shoes of the circuit, power supply, signal amplification, modulation, and noise shielding. It can directly output amplified analog EMG signals. Four dry electrodes were connected with a flexible flat cable. Then the EMG signals were transmitted to the NI USB-6211 data acquisition card to subject to analog-to-digital conversion. Through the PCI interface, the data acquisition card was connected with the Labview experimental facility of NI Company. The Labview experimental facility was linked with a computer through the internet access. With Labview programming and the communication protocol of the NI USE-6211 AD data acquisition card, the EMG signals of four channels were read in real time, and the signals transmitted by the electrodes were further filtered and amplified. Then analysis data were stored on the computer. In the process, The EMG signal’ unit was mV with 500 magnification. The sampling frequency and baud rate of EMG signals were 1,000 Hz and 57,600 bit/s, respectively.
In grasping force experiment, the FSRs were fixed on the tips of gloves to collect the force signals. It was connected with a resistor of 10 k in series. The FSRs displayed changing resistance once they were pressed. It can attain the information about grasping force by measuring the pressure changes on the two sides of the resistor. (The FSRs exhibited large resistance and the testing voltage was approximate to zero when they did not contact the object. The larger the grasping force was, the greater the testing voltage, so the two were positively correlated). Before the experiment, the relationship between the force and the voltage was tested by using a pressure gage, to obtain their correlation. The voltage of the FSRs were also collected to the Labview via the NI SUB-6211 card, and analyzed by the Labview, then computed and stored.
In this experiment, five healthy males were selected, weighing 100∼150 kg and aged 22∼27 years old, without history of neurologic or musculoskeletal disease. Before the experiment, these testers were instructed to be familiar to the grasping action, and the testers’ skin surface was wiped by alcohol to reduce the interference of keratin. The testers wore gloves, so the FSRs not only did not influence the action of the hand, but also were able to collect the complete force signals under eachgrasping mode, as shown in Fig. 5 (d). After wearing the gloves with FSRs, the testers changed the magnitude of the applied force in different mode, each of which lasted for 15 s. In each grasping mode, ten groups of signal data were collected. When a group of grasping force signal was acquired, testers had a rest for 5 minutes in case of muscle fatigue. The sampling frequency of grasping force was 1,000 Hz and the accuracies of the force were 0.1 N.
The data pre-processing comprised two parts: de-noising and data partitioning. In the research, wavelet de-noising method was applied to remove the high-frequency noises in the EMG and force signals. In addition, the notch filter was used to get rid of the power-line interference of 50 Hz in the collection process of the EMG signals. The EMG signals de-noised are shown in Fig. 5 (f).
For the convenience of analysis of the EMG signals in the time domain, a sliding window was used for data partitioning, with a window length and sliding increment of 256 ms and 64 ms, respectively. At the sampling frequency of 1,000 Hz, the window data and increment were 256 and 64, respectively.
Force prediction model based on EMG signals
The mean absolute value (MAV) was adopted as the feature of the EMG signals in the experiment. The nonlinear modeling was carried out to construct the relationship between the EMG signals and the force. The features MAV of four-channel EMG signals were taken as four input variables, while the force signal was output variable.
where x i (k) , 2 (k) , 3 (k) and x4 (k) were the input variables, F (k) was the output variable, f was the desired function mapping relationship.
According to the tuning methods in 2.3.2, the modeling process and results are as follows. The input-output data is 4990, 2500 for training and 2490 for testing. The fuzzy-C mean algorithm clustering is used to obtain the centers c
ij
and the width ξ
ij
of Equation (6), where i = 1, 2, . . . , n, n = 4 is the number of input variable, j = 1, 2, . . . , l, l = 5 is the number of clustering center for input x
i
(k).
The jth fuzzy rule is expressed as
Coarse-tuning: Fixing the ratio value K = 5 and v
ij
= ξ
ij
as the initial value, then the parameters v
ij
and K are searched in this stage, the optimal parameter value can be obtained as
Case 1: For ball grasp mode, the results of parameter K and τ are K = 5.98, τ = 0.167v, results of parameter v are shown in Table 1.
Parameter results in ball grasp mode
Case 2: For lateral pinch mode, the results of parameter K and τ are K = 8.69, τ = 0.1115v, results of parameter v are shown in Table 2.

(a)-(b): The comparison of modeling results between FLS, GPFLS and PFLS; (c)-(d): The secondary PDF of GPFLS in force prediction model.
Parameter results in lateral pinch mode
(a): Average performance of force estimation and parameter compare in ball grasp mode; (b): Average performance of force estimation and parameter compare in lateral pinch mode.
The secondary PDF used in this model are shown in Fig. 6 (c)-(d). It is noted that these secondary PDF in general PFS are convergent. In coarse tuning process, the parameters of GPFLS are v ij and K, they are reduced compared to the parameters v ij and τ ij of PFLS. This improves the parameter learning speed. The average simulation time (training time and testing time) of PFLS is 8 s, the average simulation time of FLS is 3 s, and the average simulation time of GPFLS is 4 s. It is shown that the GPFLS, which is based on general PFS, has a better performance than FLS, and its simulation time is reduced compared to PFLS.
The convergence of general PFS is used in this modeling problem, it avoids the model into local inefficiency. The parameter K is introduced, so the new tuning method reduces the parameter number and improves the convergent speed of PFLS. Because of the general PFS, the probabilistic fuzzy logic system simplifies its learning process.
In this paper, a new probabilistic fuzzy set named general PFS is proposed by randomly varying the width of Triangular membership function. Its convergence that fuzzy membership degree in this set can approximated by unimodal distribution is derived. This general PFS has better interpretability, and is able to learn more information from original data. A new method for tuning parameters of PFLS is proposed. This method reduces the parameter number and improves the modeling speed of PFLS. Finally, the probabilistic fuzzy logic system based on general PFS is applied to EMG manipulator modeling problem. This will broaden the potential application of probabilistic fuzzy sets. In the future, the distribution regularity of membership degree needs to be further tapped. Some design may be conducted, such as interval-valued PFS, whose membership degree is interval value with corresponding probability value.
Footnotes
Appendix A
The secondary PDF in general PFS
Suppose width ξ is a random variable following normal distribution described as ξ ∼ N (ν, τ2), then the density function is
Thus fuzzy grade U = - |x - c|/ξ + 1 (u ∈ (0, 1)) becomes a random variable. Though U is non-monotonic, it is monotonically decreasing in (0, + ∞). When u is in (- ∞ , 0), the distribution function is F
U
(u) = P (U < u) =0. When u is in (0, 1), since width ξ must be positive, so the distribution function is
By simplifying, we can obtain the probability distribution expression of U as shown in Equation (8).
To obtain the secondary PDF, the first derivative of u is considered. Based on Variable Limit Integral Derivation Formula, the PDF of u can be obtained as
Then, the Equation (A.3) can be simplified as
It is noted that the primary MF (6) is not normalized, so the fuzzy membership degree U will be out of the scope [0, 1], it will make its probability density function incomplete. So the PDF (A.4) is handled to be normalized in general PFS, which is obtained as Equation (9).
Appendix B
Details of some equations in Theorem 1
The expression of secondary PDF is
Based on Equation (14) in Theorem 1, the secondary PDF Φ (z) has two extreme points z1 and z2. To find the relationship between these two extreme values, this ratio is considered as
Based on Equations (15) and (16), formulas z2/z1, (a/z2 - ν) 2 and (a/z1 - ν) 2 can be obtained as
Plugging Equation (B.3), Equations (B.4) and (B.5) into Equation (B.2), the ratio of two extreme values can be calculated as Equation (17).
Acknowledgment
This work was supported by School Science Fund for Young Scholars (QJ201511), Research project of Outstanding Young Scholars in Hunan Education Committee (15B254), Research project of philosophy and social science in Hunan Province (16YBA380), Key project of scientific research in Hunan Education Committee (16A225), and was supported by Postdoctoral foundation of Central South University of Forestry and Technology (2015). Wenjing Huang and Yihua Li are visiting scholars in CAL POLY POMONA cooperated with professor Xudong Jia.