
Abstract
Orienteering problem is gradually prevalent in the recent decade, but studies considering both uncertainty and multiobjective are still at low pace. In this paper, the uncertain multiobjective orienteering problem (UMOOP) is modeled based on uncertainty theory, in which objective functions contain uncertain vectors. Firstly, the Kataoka criterion and the ‘worst-case-oriented’ philosophy are adopted, and the UMOOP is transformed into a deterministic problem
Keywords
Introduction
Orienteering problem (OP) is a typical discrete combinatorial optimization problem, which originated from the outdoor sports in Sweden. It is also called the selective traveling salesman problem. In the last decade, the OP has a wide range of applications in logistics, tourism and military. More details and variants can be found in several surveys [1, 2]. Under the situation of more than one conflicting and incommensurable objective, the OP can be formulated as a multiobjective orienteering problem (MOOP). For example, when UAV performs a reconnaissance mission, all targets may have their value and the security for scouting as a pair of conflicting and incommensurable objectives, consequently, a multiobjective decision situation arises. The multiobjective orienteering problem is a must in the practical application, but there is a lack of relevant research. Sometimes, people have to make decisions with imprecise information or data making the problem harder to tackle. Stochastic service times are first introduced in the OP by Tang and Miller-Hooks [3]. İlhan et al. [4] takes the uncertainties in scores into account, and other investigations can be found in [5–9].
In fact, the main theory to deal with the OP under the condition of indeterminacy is probability theory. However, the premise of probability theory should be emphasized that the estimated probability must be close enough to the real frequency. Once no samples are available, probability theory would be no longer applicable, and decision-makers have to invite some experienced experts to evaluate the belief degree of the event. A phenomenon was found that human beings have the tendency of exaggerating unlikely events [10]. If the belief degrees are treated as probability, something counterintuitive will arise [11]. For these reasons, uncertainty theory with complete axiomatic foundation was founded by Liu [12], and redefined by [13]. Until now, applications of uncertainty theory are across a wide spectrum of domains, including finance [14], regression analysis [15, 16], risk [17], differential equation [18, 19], and other areas [20–22].
Although uncertainty theory and application has received much attention and developed quickly in recent years, studies on uncertainty multiobjective problems are rare except works in [23–28] etc. Besides, many realistic issues both uncertainty and multiobjective can not be referred so far. This lack of study is very unfortunate, because those issues cannot be ignored in practice. Therefore, model of UMOOP is first formulated in our works, whose objective functions contain uncertain vectors to characterize the uncertain factors. However, it is extremely challenging to solve UMOOP for the existence of uncertain vectors, since the traditional multiobjective theory is not suitable at all. Hence, efficient solution theory for uncertain multiobjective programming is necessary. Expected-value efficient solution is a basic and commonly used concept, whereas this kind of efficient solution is generally propitious to a long term decision-making. However, it is not always considered as a good measure, likely to obtain some terrible results in the next decision-making for the dispersion of the uncertain variables.
For the above reasons, the Kataoka criterion and the ‘worst-case-oriented’ philosophy are adopted. Firstly, a series of minimum profit levels are set for each objective. Then, belief degrees of the events that each objective is not lower than the minimum profit levels, are controlled with a set of certain levels. Finally, maximizing the minimum profit levels becomes the objective of decision-making in the new model
However, it is more ambitious to obtain efficient solutions to the D-UMOOP, because OP and its variation are NP-hard. In our works, a newly-developing bat algorithm is chosen to find Pareto efficient solutions to the D-UMOOP. It is proposed by Xin-She Yang in 2010, and reasons for efficiency of the bat algorithm have been analyzed [29]. However, the traditional bat algorithm is not suitable for the discrete optimization problem. Therefore, a modified discrete multiobjective bat algorithm (MOBA) is developed for D-UMOOP by designing discrete updating process and combining with the fast non-dominated sorting genetic algorithm. In order to improve the exploitation capability, a multiobjective local search strategy is designed based on the reduced variable neighborhood search. Some standard benchmark instances are used to show the performance of the algorithm.
Finally, the theoretical result and algorithm in the paper are applied to UAV reconnaissance mission planning with uncertain factors to describe how to make decisions in the practical application. An uncertain biobjective UAV reconnaissance mission planning problem is modeled. Both the profit and security in the mission are considered, and minimum profit level and security level are set. Then belief degrees are controlled to a set of certain levels to make the profit and security not lower than the minimum levels. Through the assumptions, a D-URMPP model is obtained. After this, efficient solutions with belief degrees are given each representing a feasible flight path for the UAV. In conclusion, this studies provide an innovative method to the UAV reconnaissance mission planning problem considering multiobjective and uncertainty in practice.
The paper is organized in the following manner. The next section reviews some basic relational contents of uncertain theory. In Section 3, model of UMOOP is established and the concept of efficient solution with belief degree is defined. In Section 4, how to obtain efficient solutions with belief degrees is deduced, and the crisp deterministic equivalent form has been obtained. In Section 5, the variation of the bat algorithm for MOOP is designed. In Section 6, an application to the uncertain biobjective UAV reconnaissance mission planning problem is provided. Finally, the main results of this paper are summarized in Section 7.
Preliminary
Let Γ be a nonempty set, and
The triplet
Model of UMOOP
In this section, a model of UMOOP is originally established based on uncertainty theory, and how to introduce and deal with the uncertain vectors in the objective functions is described.
In order to model the uncertain multiobjective orienteering problem, a directed graph with a vertex set V = {v1, v2, …, v N } and an arc set A = {(v i , v j ) |v i , v j ∈ V, i ≠ j, v i ≠ v N , v j ≠ v0} is considered. The travel time between the vertex i and j is represented as t ij , the total tour time cannot exceed T max . Except for the starting vertex v1 and the ending vertex v N , each vertex has one or more nonnegative scores. When coming by a vertex, its score is gathered. In primal OP, the aim is to find a feasible tour maximizing the total score. However, decision-maker usually has different types of preferences for the vertex to be visited in practice, and these preferences can’t meet at the same time. In other words, vertex may have more than one score corresponding to different preferences, which are conflicted with each other. Therefore, a multiobjective situation needs to be considered. Besides, the scores of each vertex are actually not inherent, generally decided by the decision-makers or some experts. Actually, the scores of the vertexes are usually uncertain, and different scores may be decided by different decision-makers for the same vertex. Once the scores are given, they may change over time due to the environmental factors.
To characterize the uncertainty in the process of determining the vertex scores, the uncertainty vectors are introduced. Assume vertex scores vectors
Then, the mathematical model of the UMOOP is defined as the form:
Since each objective function comprises a series of uncertain vectors, it cannot be directly dealt with traditional multiobjective optimization theory. In the existing literatures, expected-value efficient solution is a basic and commonly used concept for a long term decision-making, but some low objective values may be obtained in the next plan because of the dispersion of the uncertain variables. Therefore, we propose a practical method by defining efficient solution with belief degree, which inspired by the Kataoka criterion and the ‘worst-case-oriented’ philosophy. In the method, the minimum profit levels are set for each objective, and each uncertain objective function is not less than the minimum level with a certain belief degree. The Pareto efficient solution is to maximize all the minimum level. The minimum profit levels μ
k
are set for each objective, μ
k
≤ f
k
(
Since the uncertain constraints cannot define a feasible set, we refer to the Kataoka criterion controlling the belief degrees that the uncertain constraints hold to a series of confidence levels α1, α2, …, α
K
. Then we propose the following certain model (
In the section, model of UMOOP is established, and the concept of efficient solution with belief degree is defined through Kataoka criterion and the ‘worst-case-oriented’ philosophy. Next, the main task is to solve the Pareto efficient solutions to the
In this section, we try to obtain efficient solutions with belief degrees to the UMOOP. As we can see, it is difficult to solve Pareto efficient solutions to
Since the uncertain vectors are involved in the first assumption, some basic definitions and lemmas about the expected value and variance of the uncertain vector are given and deduced.
By the formula above and Theorem 4,
Besides, by Theorems 2 and 3, the expected value
Then,
Note that objective functions of UMOOP are
By the Equation (7), uncertain objective functions f
k
(
By Lemmas 1 and 2, the expected value and the valiance of the k-th objective function are E [f
k
(
Thus, we obtain
Next we continue to give some derivations under the situation 2.
Then the k-th objective function of the UMOOP is
For any given
Then, the right of the chance constraints
Then we have the chance constraints for k = 1, 2, …, K,
Thus, we obtain
By Equations (8) and (9), we can see that the μ
k
is less than or equal to the same form E [f
k
(
Through the above deduction, it is not hard to find that we can get efficient solutions with belief degrees to the UMOOP by solving the D-UMOOP. The D-UMOOP is essentially a multiobjective orienteering problem, harder than the OP. In the existing literatures, few algorithms for MOOP have been researched. Therefore, a discrete multiobjective algorithm for the model D-UMOOP will be designed.
As a variation of OP, MOOP is typical multiobjective discrete combined optimization, which is proved to be NP-hard. A newly proposed bat algorithm famous for its accuracy and efficiency has been gradually used to tackle combinatorial optimization and scheduling problem. Nevertheless, the standard bat algorithm is not suitable for MOOP, because the updating equations are continuous in the iterations process. In the section, a discrete multiobjective bat algorithm (MOBA, Algorithm 1) is developed. Then the processes of initialization, updating and local search are introduced.
The discrete multiobjective bat algorithm
The discrete multiobjective bat algorithm
In the algorithm, each artificial bat has two important kinds of information, the position and the velocity. The initial velocity has the same length as the corresponding position, and adopts binary codes, if there is a velocity vector
In the initialization phase, the velocity is built arbitrarily. Each position represents a feasible route, which starts from the vertex v1, and ends at the vertex v N . Each vertex cannot be visited repeatedly, and the time cost of each route cannot exceed the maximal time limitation. Therefore, during constructing the solution, we use the vertex numbers from 1 to N to denote all the vertex. At the beginning, each position just includes numbers 1 and N. Then, the unvisited vertex’s number is inserted randomly before the N until none can be inserted because of the maximal time limitation.
The process of updating
In traditional bat algorithm, the rules of positions and velocities updating are given by these equations,
In addition a new solution for each bat is generated locally using discrete random walk as follows
After the process of updating, a judgement about the maximal time limitation is made, then we ensure the path feasible by deleting or inserting point randomly.
In the above, the process of initialization and discrete updating are given to obtain various feasible paths. Next, an approach of local search is introduced to improve the path, which is called reduced variable neighborhood search [32]. In order to solve MOOP, a multiobjective reduced variable neighborhood (MORVNS) search is designed. The objectives in the D-UMOOP are transformed into a single objective by introducing a random weight vector
Then Four kinds of neighborhood structures are chosen to realize local search, and some brief description is provided about four structures, referred to Fig. 1. Randomly insert unvisited vertex: a unvisited vertex is chosen randomly, then it is inserted into the solution between every two adjacent vertexes until the maximal time limitation is exceeded. The neighborhood structure aims to add the unvisited vertex to the path getting the higher profit. Exchange vertex: an unvisited vertex with a higher fitness value is chosen randomly, then the vertex in the path with a lower fitness value is exchanged in turn by the unvisited vertex chosen until the new path is feasible. Randomly reinsert visited vertex: a vertex in the path is reinserted until the new path is shorter than the former one. Path Invert: we use the familiar operation 2-opt to make the path shorter.
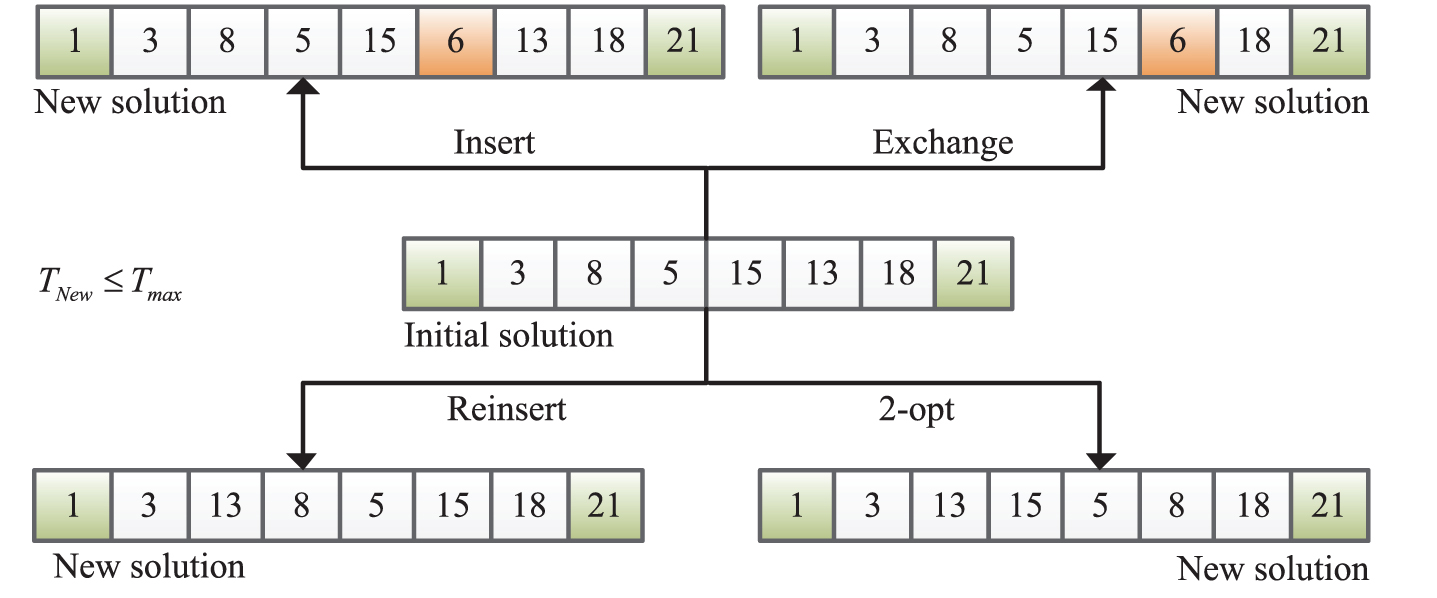
The neighborhood structures in the MORVNS.
In order to demonstrate the applicability of MOBA algorithm, 67 OP benchmark problems and 6 biobjective OP benchmark problem (Table 1) are introduced.
Description of benchmark problems
First, 10 independent runs are made in the experimentation on Dataset 1-4, the algorithm is set including 10 artificial bats and the maximal iterative time is 10. Then two statistical parameters are introduced to test the performance of the algorithm. The first parameter is relative percentage error (RPE), showing whether the best known solution has been found, its mathematical formula can be listed as follows,
Comparisons with previous studies’s results on Dataset 1-4
By the results, we know that the best known solutions can be solved by the algorithm in all 67 OP benchmark problems, and computational results also show that it provides competitive results for the single objective problem than other algorithms.
In order to further verify the performance of the algorithm, some experiment on Dataset 5 and 6 are performed. the algorithm is set including 100 artificial bats and the maximal iterative time is 200. Then we compare with the results of ACO [33]. On the benchmark problems 2_P64_t015, 2_P66_t005, and 2_P66_t130, we have obtained the same results with ACO, and the objective values are (96, 253), (10, 97), and (1680, 916), respectively. Computational results on the problems 2_P64_t050, 2_P64_t080, and 2_P66_t070 are shown in Fig. 2, which are competitive comparing with the ACO.
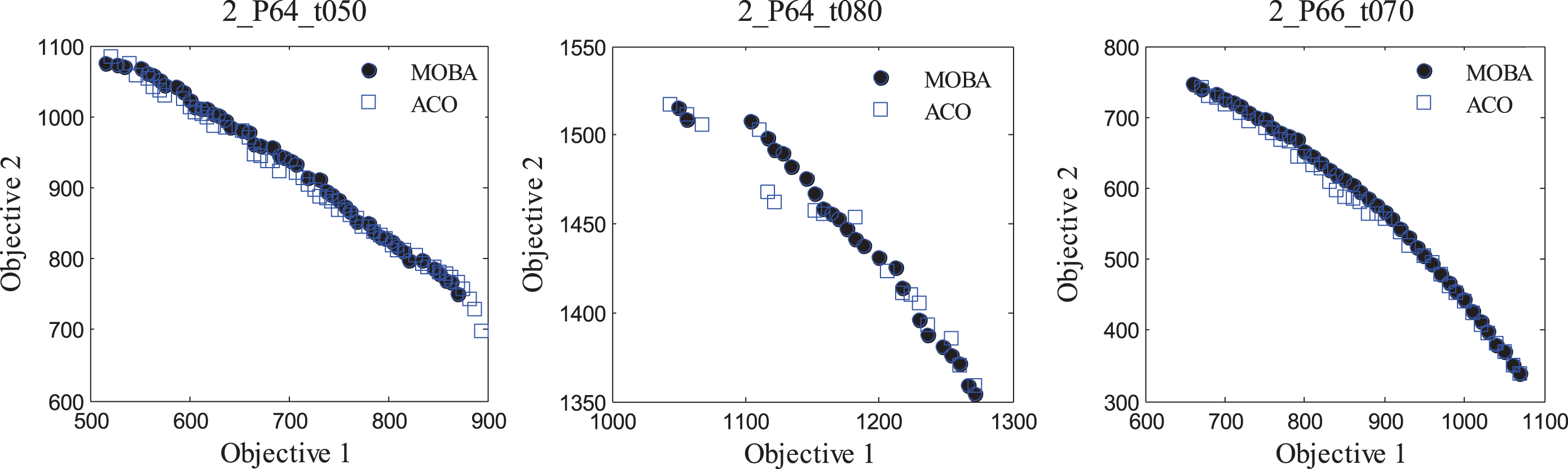
Results of some multiobjective benchmark problems.
In the section, a discrete multiobjective bat algorithm is developed and tested on the 73 benchmark problems. The result shows that the MOBA has the better capabilities and robust at the same time. Consequently, the algorithm can be used to solve the D-UMOOP problem. Next, a practical application is provided using the theoretical result and algorithm in the paper.
We illustrate detailedly the practical application of the efficient solutions with belief degrees and the MOBA by dealing with the unmanned aerial vehicle (UAV) reconnaissance mission planning problem.
The uncertain UAV reconnaissance mission planning problem
The actual case and data are customarily unobtainable for the reason of security. A situation is considered where a tactical UAV in a base is assigned to complete a reconnaissance mission. There are a lot of targets so that a single UAV can’t reach all for maximum range limitation. Consequently, when planning a reconnaissance mission for the UAV, the decision-maker must consider the value and security of the target, then some of the targets are chosen based on the value and security information to maximize the mission profit on the premise of security. Whereas, the value and security coefficients of each target are hard to obtain through experiments, and have to be evaluated by the commanders or skilled pilots of the UAV. Coefficients of the targets will be different and uncertain affected by the evaluators or the battlefield intelligence. Then, uncertainty variables are used to model uncertainties of the expert belief degrees in the process of evaluating.
In Fig. 3, the sketch map of the mission area and relative coordinates of the base and targets are given, where the UAV base is denoted by number 1 and the targets 2 to 16 respectively. Only an available UAV is for the reconnaissance mission. Bound by the fuel quantity, UAV’s maximum range D
max
is 200 km, which the distance of the flight path cannot exceed. When implementing the reconnaissance mission, a UAV takes off from the base and visits the targets as much as possible, returns to the base finally. In the RMPP, each target has its value coefficient and security coefficient, and the vectors of target value coefficients are denoted by uncertain vector
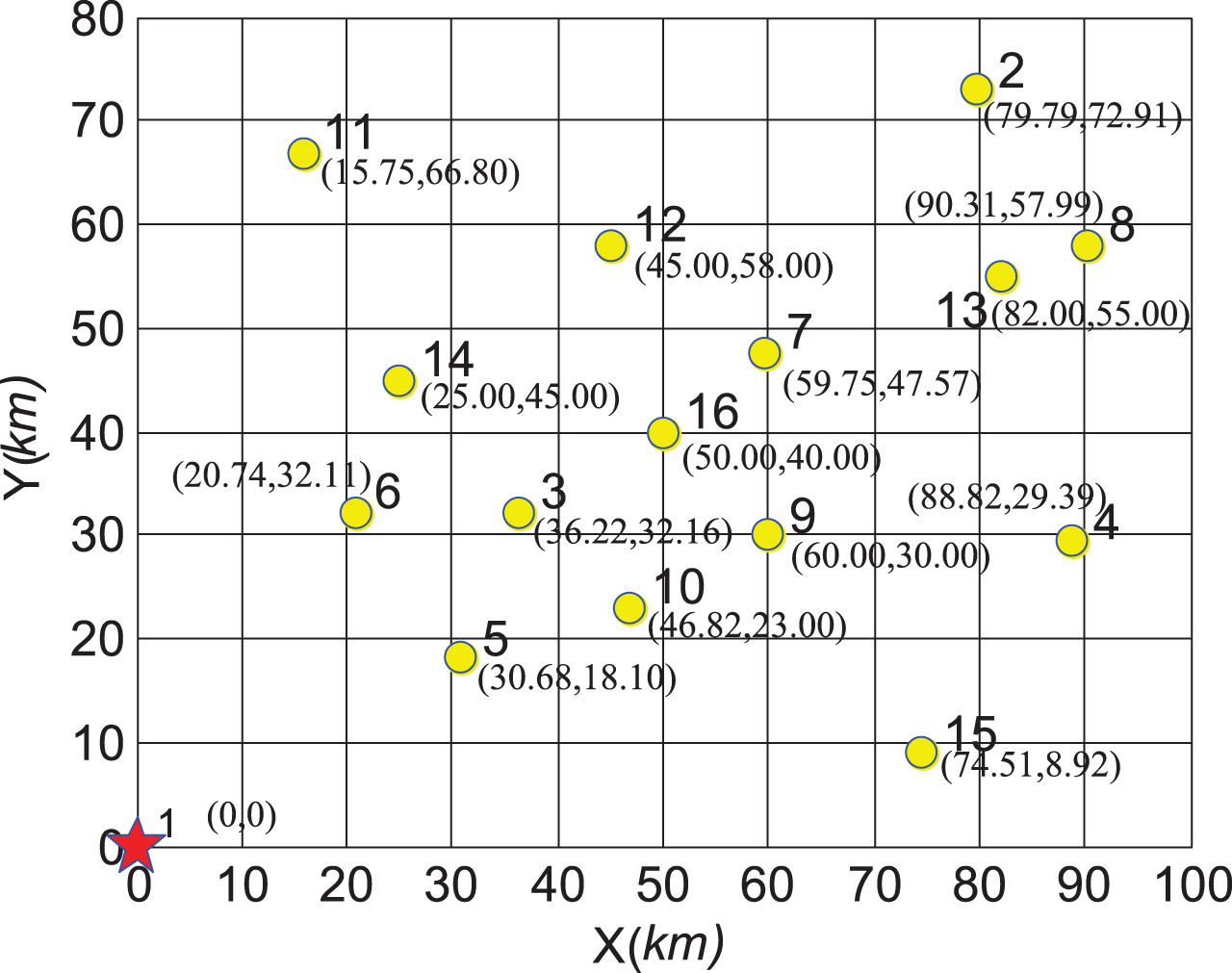
The sketch map of the mission area.
In the problem, the objective functions are affected by the uncertain variables, therefore it is hard to deal with the uncertain biobjective orienteering problem using the traditional multiobjective theory. Some attempts can be adopted to solve it, deduced in the Section 4. By Definition 9, a solution
Then, we can deduce the crisp deterministic equivalent form (D-URMPP) of the problem as follows,
Parameters in the MOBA
Parameters in the MOBA
By using the MOBA algorithm, we will obtain Pareto efficient solutions to D-URMPP, which are also efficient solutions with belief degrees to the URMPP. In Table 4, we list all the efficient solutions with belief degrees to the uncertain RMPP, and each solution represents an alternative flight path. For instance, if mission mean profit is required greater than 140, then solutions S1.1, S1.2, S1.4, S1.5 should be eliminated; if the mean security function is required greater than 300, then the solutions S1.8 should be eliminated. Further, if the decision-maker considers both their mean and standard deviation, then the solutions S1.3, S1.6, S1.7 may be more appropriate for these scenarios.
Solutions in the Scenario 1
Then we list the Pareto efficient solutions in the Table 5. Comparing the solutions of the first two scenarios, we can see that most of the solutions are uniform, but when uncertainty distributions of some targets are changed, the solutions S1.5 and S1.6 are not in scenario 2, and a new solution S2.4 appears. As we can see, solutions S1.2 and S1.4 contain targets (2, 8, 13), but solution S2.3 not. Consequently, efficient solutions with belief degrees theory can make UAV not scout the targets as far as possible, whose uncertain coefficients have large variation range. This character may prevent the solutions from uncertainty to some extent.
Solutions in the Scenario 2
Then Pareto efficient solutions are listed in the Table 6, some comparison and analysis are made to study the influence of belief degree. In scenario 3, we change the belief degree α1 from 0.9 to 0.96 on the base of scenario 1, then solution S3.5 appears in the solution set, thereby belief degree can be regarded as a tolerance degree to the uncertainty, adjusted by the decision makers in practical application.
Solutions in the Scenario 3
Next, an example under the situation 2 is taken to make a theoretical analysis. We can know that
This paper first proposed a UMOOP model based on uncertainty theory, considering uncertain factors in the objective functions. Besides, a concept called efficient solutions with belief degrees has been defined, and we have transformed the
Then, the proposed MOBA was first adapted to the D-UMOOP using a discrete updating rules. A multiobjective reduce variable neighborhood is designed to improve the ability in exploitation. The algorithm is tested on the 73 benchmark problems to experimentally investigate the performances.
Finally, the theoretical result and algorithm in the paper have successfully applied in the UAV reconnaissance mission planning problem. Both mission profit and security are regarded as uncertain factors. Then a model of URMPP has been established, and transformed into the D-URMPP. Pareto efficient solutions are obtained through the MOBA representing the alternative flight paths. Uncertainty distributions and belief degrees have been changed to study the influences, and the theoretical analysis demonstrated that our proposed theories and algorithm are effective and consistent with the experimental results.
Footnotes
Acknowledgments
This work was supported by National Natural Science Foundation of China (No. 61502521).