
Abstract
This paper presents a fractional order nonlinear Proportional Integral Derivative (FONPID) controller to efficiently achieve the Maximum Power Point Tracking (MPPT) in Photovoltaic (PV) systems working under rapidly varying solar intensity and the temperature. In this paper, comparisons have been made among different techniques in respect of the extent of energy extracted from the photovoltaic (PV) system using MATLAB platforms. Gains of the proposed FONPID controllers are optimally tuned using a meta-heuristic based Elitist Teaching Learning Based Optimization (ETLBO) algorithm. The performance assessment of the FONPID controller is made in terms of efficiency, settling time, rise time and ripple. The ETLBO tuned FONPID controller outperforms the other controller such as PID, Nonlinear PID (NPID), Fractional order PID (FOPID) and perturb and observe (P & O) technique. Therefore, in view of the meticulous investigation it is inferred that the proposed FONPID controller is an emerging MPPT technique with highest tracking efficiency and negligible ripple.
Keywords
Introduction
In the phase of rapidly increasing environmental pollution, it is imperative to have thorough investigations on the prime contributors of ecological disturbance worldwide [1]. Modern global changes have increased the attention towards the solar based technology, as it is eco-friendly, zero fuel cost, noiseless and requires low maintenance. However, energy conversion efficiency and the high investment are two limiting factors in solar based energy generation technology [2].
Commonly used silicon crystalline type solar cells are 20–30 % efficient only [3]. The available power from solar cells may reduce, depending upon the environmental condition and the loading condition. Besides the energy conversion in the solar cells, extraction of energy converted is also very important. Therefore, in order to extract maximum available power, a control arrangement known as maximum power point tracking (MPPT) is usually implemented for the operation of a PV system under varying operating conditions [4]. Various MPPT techniques have been reported in literature such as perturbation and observation (P & O), constant voltage, fractional open-circuit voltage/short-circuit current, intelligent technique and incremental conductance (IC). Out of all these algorithms, P & O, Constant Voltage and incremental conductance are the largely practiced algorithms [5–7]. Due to the oscillatory behavior observed near MPP with P & O technique, IC algorithm is usually preferred [8]. To implement MPPT in solar systems a DC–DC converter is usually linked in between the PV modules and the load. MPPT algorithm is executed by controlling the duty cycle of the converter.
MPPT algorithms mainly uses the slope of the power versus voltage (P–V) curve of PV module to regulate the duty cycle of the DC–DC converter for system operation at MPP. As a matter of fact, due to the presence of truncation error in the mathematical variation inside the controller, the PV system rarely operates at the peak of the P–V curve. These algorithms give better results with variable step size considered according to the distance of current operating point to the MPP. Wherein bigger step size is selected for away points subsequently smaller step sizes are selected for the nearby points [9].
Controller is an integral part of control loop required for applying MPPT techniques. In order to provide a variable step size, PID controller tuned with Bio inspired optimization technique was proposed in [10]. Fuzzy logic gain scheduling method has also been proposed for controller efficiency enhancement [11]. It is worthy to be noted that the PID, in conjunction with different intelligent methods raise the computational cost in comparison to conventional PID. Hence, it is always useful to design a MPPT technique that preserves the attributes of PID controller and exhibit adaptive performance also. In order to provide flexibility to controller structure scheme, Nonlinear (NPID) is designed. Furthermore, fractional features are introduced where the order of differentiation and integration is taken as non-integral value to enhance the performance. Prodigious uses of fractional order type controllers are reported in the literature [12, 13]. For the tuning of gains, Elitist Teaching Learning Based Optimization (ETLBO) is relatively simpler and gives better performance in comparison to another advanced meta-heuristic algorithm [14].
In this paper a robust nonlinear fractional order PID (FONPID) controller is developed for efficient operation of MPPT. The organization of this paper is as follows. An introduction including literature survey is succinctly presented in Section 1 followed by mathematical modelling of PV system and DC/DC converter is presented in Section 2. Section 3 describes the implication of the proposed MPPT technique along with the design of its control structure along with PID, FOPID and NPID controllers. Section 4 deals with the comparison of performance of the MPPT by the proposed controller with the rest of controllers such as FOPID, NPID and PID for varying irradiation and temperature levels. Eventually, Section 5 deals with the conclusion part of the paper.
System description
A standalone PV system consisting of PV module dc–dc converter and a resistive load is investigated in this research work. Primarily, Mathematical modelling of PV with its parameter has been explained.
PV cell model
PV cell model having one diode is widely used in modelling and control as it offers high accuracy with low computational burden. An equivalent circuit of an ideal photovoltaic cell is shown in Fig. 1.
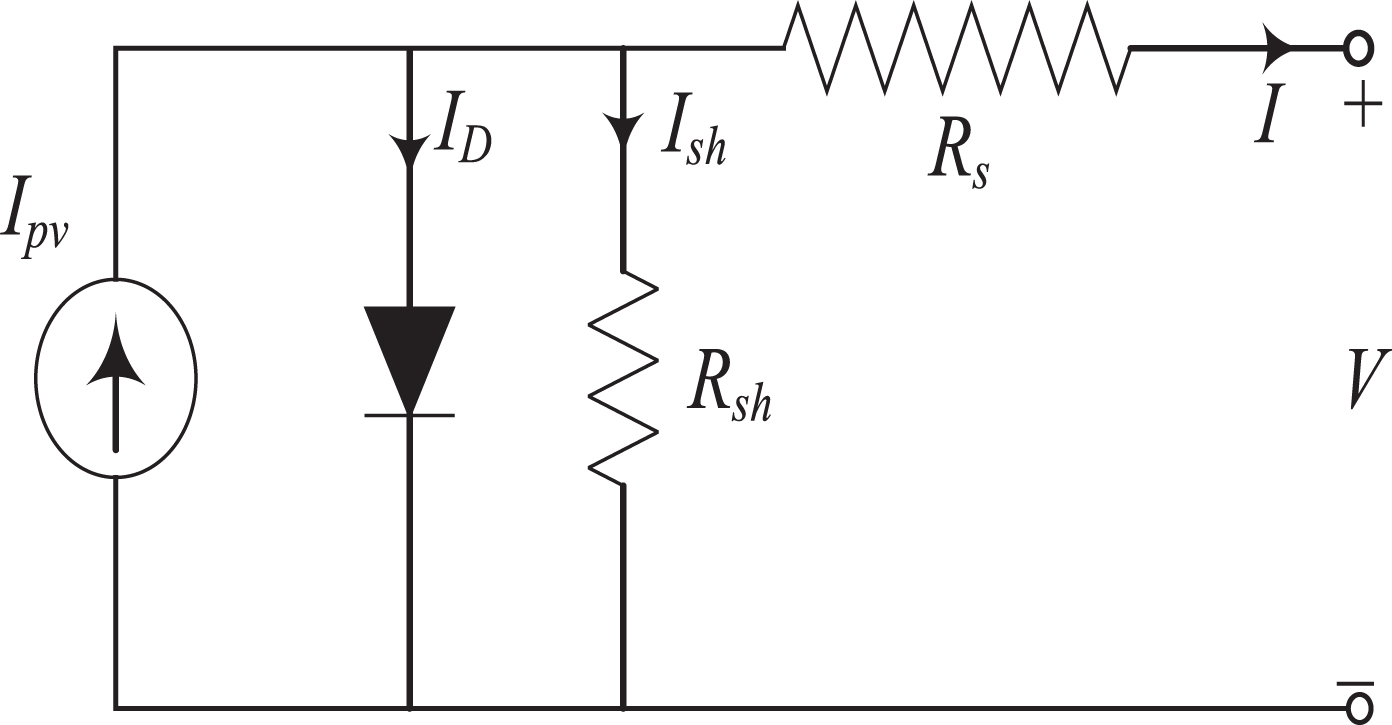
Equivalent circuit of PV cell.
The basic mathematically equation that exhibits the I–V characteristic of the PV cell is given by Eq. (1)
Several connected PV cells formed in such a way to form array or module and the characteristics curve observed at the PV array terminal involves the additional parameters to the basic equation, modified equation shown in Eq. (2) as,
Where, V t = NKT/q is the array thermal voltage. The parameters for the KC200GT solar panel by M/S Kyocera [15], to be implemented in this research exertion were assessed and are accessible in Table 1 [16].
Parameters of the KC200GT PV array at 25°C, 1000 W/m2
Photocurrent of the photovoltaic cell depends linearly on the solar intensity and is also affected by the temperature based on the resulting equation given by Eqs. (3) and (4).
Where, Ipv,sis the PV current at STC, ΔT = T–T S (T and T S are the actual and standard temperatures [K] respectively), G [W/m2] is the irradiation on array, and GS is the irradiation at the standard condition. As explained earlier, the PV array Kyocera KC200GT having 54 cells was selected and subsequently data was taken for this array for analysis and simulation. Figure 2 (a) represents the current versus voltage plot and Fig. 2 (b) represents the Power versus voltage plot under varying irradiations of 500, 600, 700, 800, 900, 1000 W/m2 at Standard Temperature of 25°C. Figure 3(a) represents the current versus voltage plot and Fig. 3 (b) represents the power versus voltage plot under variable temperature conditions of 15, 25, 35, 45 and 55°C at 1000 W/m2 irradiation condition.

(a) I–V curve at varying irradiation (b) P–V curve at varying irradiation.
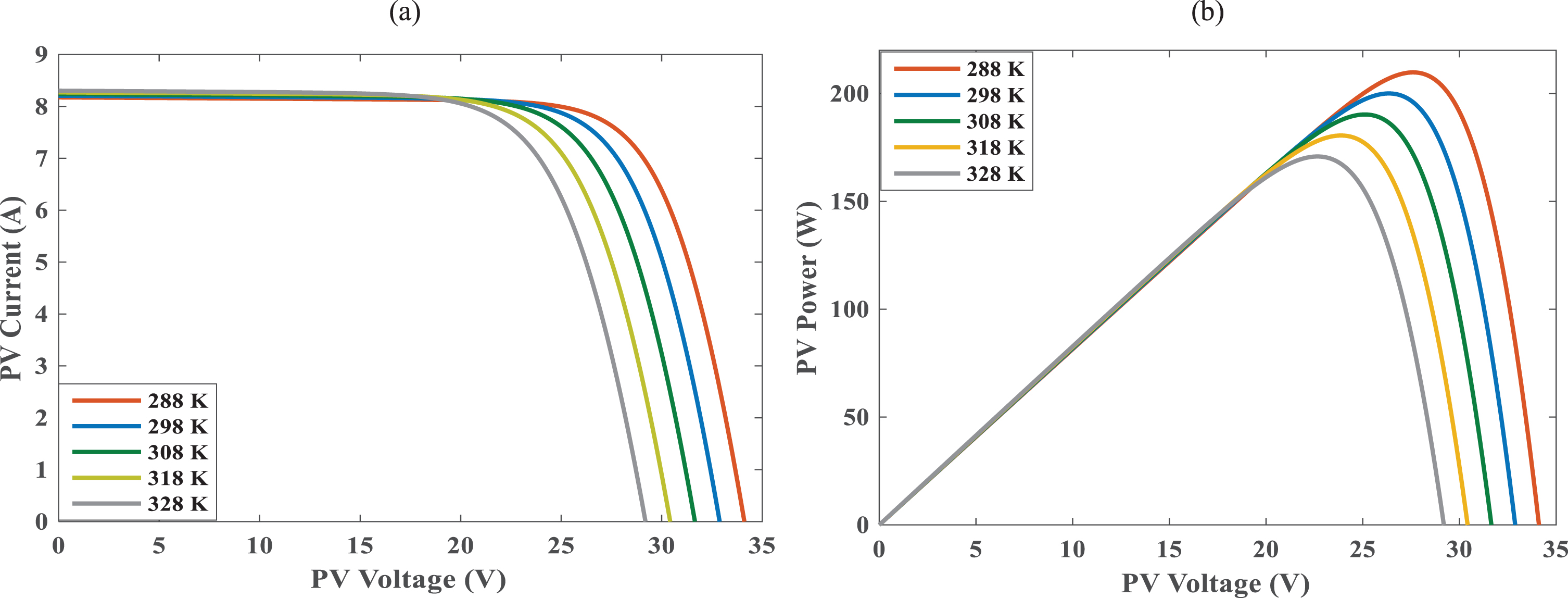
(a) I–V curve at varying temperature (b) P–V curve at varying temperature.
A boost dc–dc converter is usually positioned in between PV array and the load. This boost converter steps up the input voltage up to the voltage level which works as an MPP tracker shown in Fig. 4 [17].
Input voltage (V IN ), output voltage (V O ) and the duty cycle (D) of the boost converter have mathematical relationship expressed by Eq. (5). Inductor (L m = 0.1 mH) and capacitor (C0 = 5 mF) along with the switching frequency of 5 kHz for switch is selected [18].
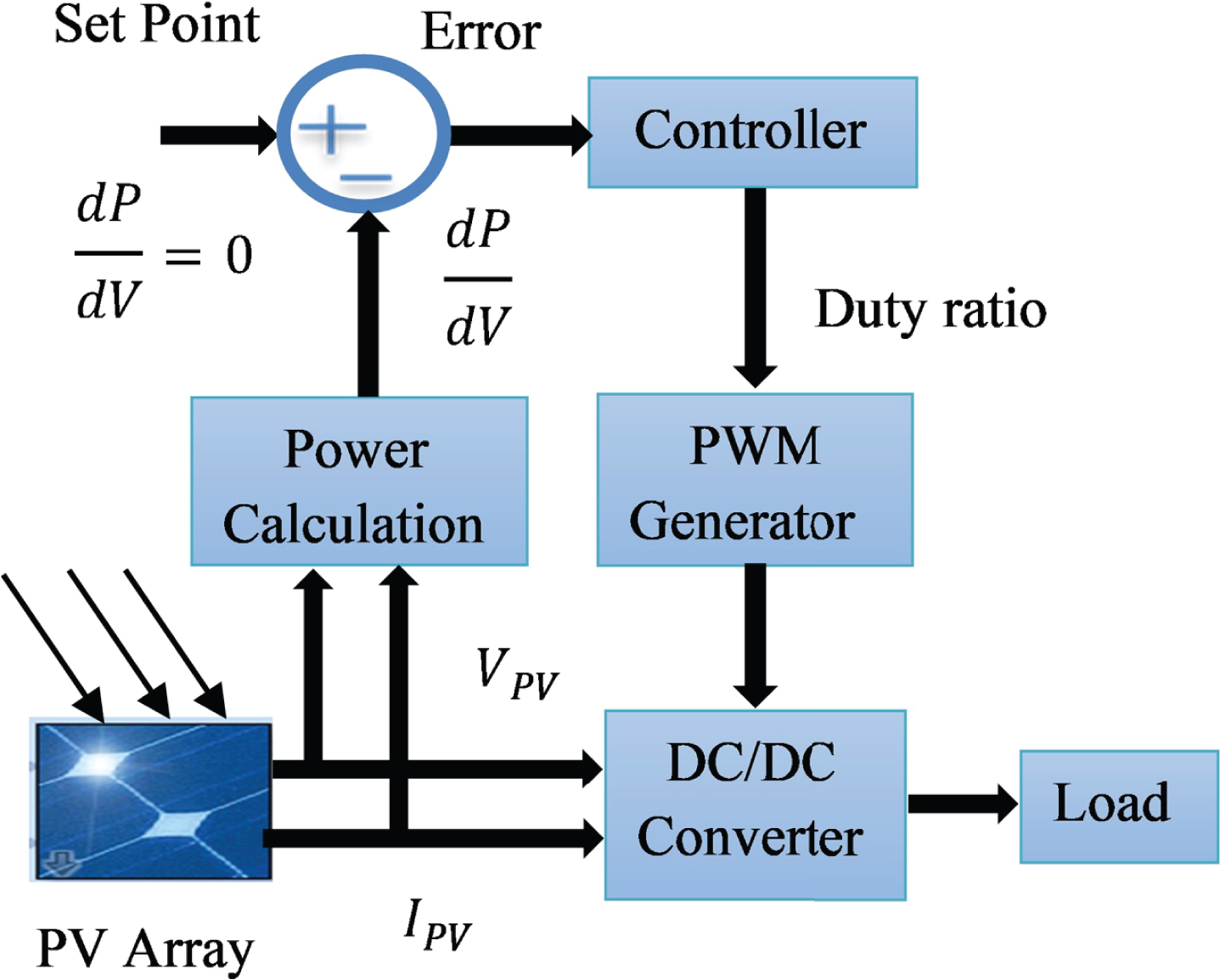
To accomplish an effective MPPT, controllers are crucial for controlling the duty ratio of the converter. Usually, controller produces a flexible voltage signal as a reference, which is fed to a pulse generator such that duty cycle changes. In this research effort, the feedback based Fractional order Nonlinear PID controller has been offered to efficiently improve the MPPT. It can be concluded from Figs. 2 and 3 that the slope of P–V curve at the MPP point is zero, based on the above conclusion of the slope; reference set-point of controller is fixed. This method is implanted under all uniform varying irradiation and temperature. Figure 5 represents the block diagram of feedback based MPPT scheme [19].
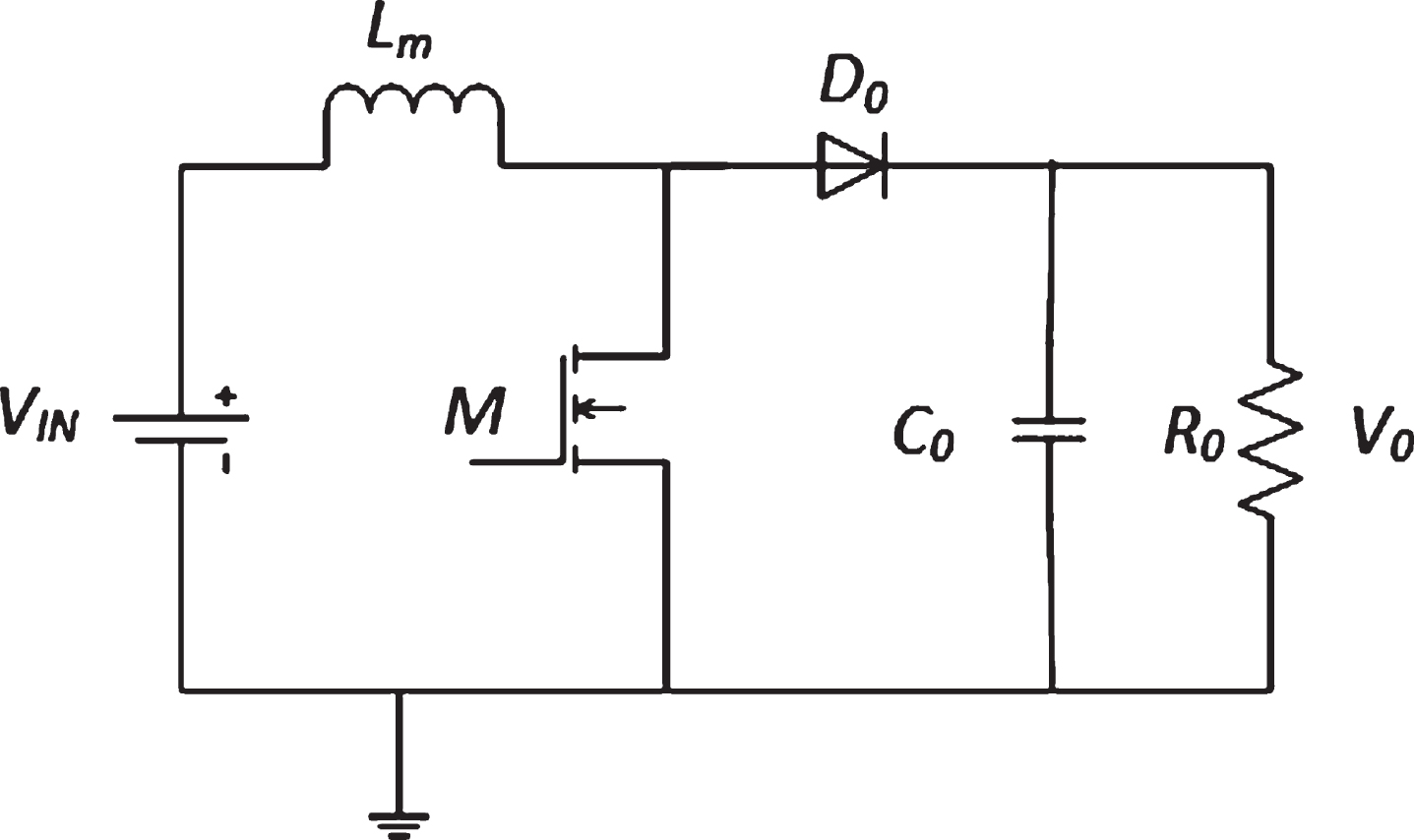
DC/DC boost converter.
MPPT control structure.
As realized in Fig. 5, the MPP is continuously tracked by forcing the operating point to zero slope of dP/dV curve. The resultant error that is generated is fed to the controller which generates variable duty cycle to minimize the error. The error signal, e (t) being the slope dP/dP of P–V graph, is applied to the controller and the output of controller p(t) is the reference voltage which consequently varies the duty cycle of the PWM generator. Generally, PID controller is designed in the form of the standard equations with K p , K i , K d be the proportional, integral and derivative gain described by Equation (6)
PV system being highly nonlinear has to face the vagaries of nature such as temperature changing irradiation and load resistance etc. Irradiation and temperature are the main input signals to the PV system. Thorough investigative study of literature reveals that more emphasis is given on impact of changing irradiance level than that of changing temperature to track the MPP. As a matter of fact, due to unpredictable conditions of the environment, temperature change is inevitable and hence impact of changing temperatures on the MPP of PV system need to be looked carefully. Temperature change over should be measured for the assessment of PV system. Based on the motivation above, Desired MPPT control designed which cover all precondition with the following points: Output has oscillation around MPP, so it is essential to reduce the oscillatory performance of the operation around MPP. Also, it is always been required to have low cost and simple controller scheme. Practically, temperature and irradiation are changing over period of time so the controller should be intelligent enough to familiarize such changes so that it will perform well in all environmental situations. Conventionally there are different techniques to tune PID, but the performance of tuned PID using meta-heuristic methods is better. Therefore, based on these meta-heuristic techniques gains of the proposed FONPID should be tuned.
To attain these goals, altogether a Fractional order nonlinear PID controller is implemented for an effective MPPT. To realize this job, the essential performance prerequisite is measured to minimize Cost function which is a combination of the Integral Absolute Error (IAE) and the Integral Time Absolute Error (ITAE) with equal weights, using ETLBO.
Design of fractional order operator and controller
Numerous approaches are reported in literature to implement fundamental fractional operator [20]. The final projected transfer function found to fractional operator s a . Where, a is fractional power of s. In this work, fractional order integration and differentiation in continuous domain is implemented by eminent approximation presented by Oustaloup. It is based on the recursive nature of poles and zeros within specified frequency range [vℓ, v u ] where, vℓ is lower frequency range and v u be the upper range of frequency. It is designed in view of a recursive filter of order which is 2K + 1 concisely expressed by Equation (7) [21, 22].
Where, s = σ + jω represents the Laplace operator, K and G are Oustaloup constant and gain respectively, the value of gain, location of poles and zeros of the filter are evaluated by Equations (8), (10) and (15).
To attain accurate and precise performance of system under varying Irradiance and Temperature conditions, the controller gain must be tuned online. Incorporation of nonlinear function and fractional operator with linear controller realizes the aforementioned assignment which cannot be achieved by constant gain linear system. The proposed FONPID structure is shown in Fig. 6.
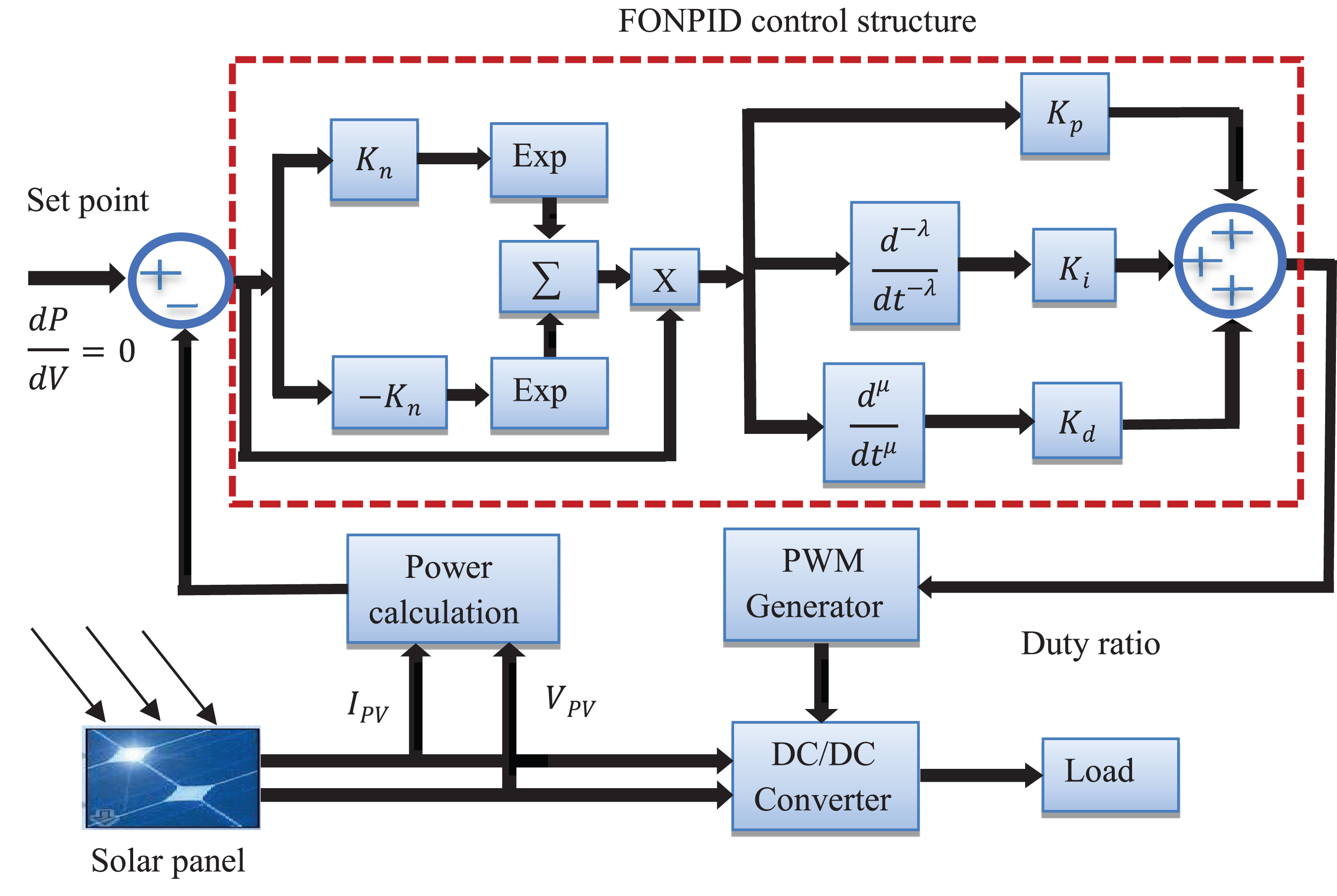
Block diagram of FONPID controller.
Hyperbolic Cosine function of instantaneous error is used to design the controller with the Gain adjusted online, thereby providing self-tuning ability to control scheme. The mathematical expression for control action of FONPID is given by Eq. (11) [23].
Where D–λ and D μ denote Integration and differentiation of order λ and μ respectively. K p , K i and K d are controller gain. The cascaded nonlinearity e′ (t) of the designed controller scheme is outlined by Eq. (12):
Where, e(t) is error of system. In this work, y is considered as a non-linear hyperbolic function which is mathematically expressed by Eq. (13) [24].
Where, e max and K n is user-tuned positive constants which defines the variation in non-linear function y, which is constrained to y min ≤y≤y max . The lower bound of the non-linear function y is given by y min = 1 when e(t) = 0, while the upper bound is given by y max = cosh(K n e max (t)). The values of dP/dV thus acquired maximum value of dP/dV. e max in this work is 8.211.
The control assembly of NPID is employed by considering the order of fractional operator λ= 1 and μ= 1 in FONPID scheme. The designed nonlinear control structures are also compared with linear FOPID and PID controller. As the input condition of temperature and Irradiance is dynamic so a large spike or kick is detected in derivative action of proposed controller. These will deteriorate performance. Typically, derivative action for rapid variations in reference is unwanted. Therefore, the control law FO-NPID is modified, so that derivative action is governed by system output. The derivative kick is thus entirely evaded, and Eq. (11) is modified in frequency domain with Eq. (14). Where, N is the filter coefficient.
In this work, meta-heuristic elitist teaching learning-based optimization (ETLBO) has been implemented in MATLAB platform to optimize the gains of FO-NPID, FOPID, PID and NPID controllers. ETLBO is an enhancement of TLBO algorithm which is developed by the communication of the learners and teacher. This technique generally includes the nature of teacher and learners. It is a matter of experience that learners can perform better when trained by a high-quality teacher. Further, to enhance the performance, interaction and communication among learners may also be treated as a supportive tool of learning. The entire implementation of ETLBO can be succinctly put in the learner phase and the teacher phase. Flow chart of algorithm presented in Fig. 7 [25].
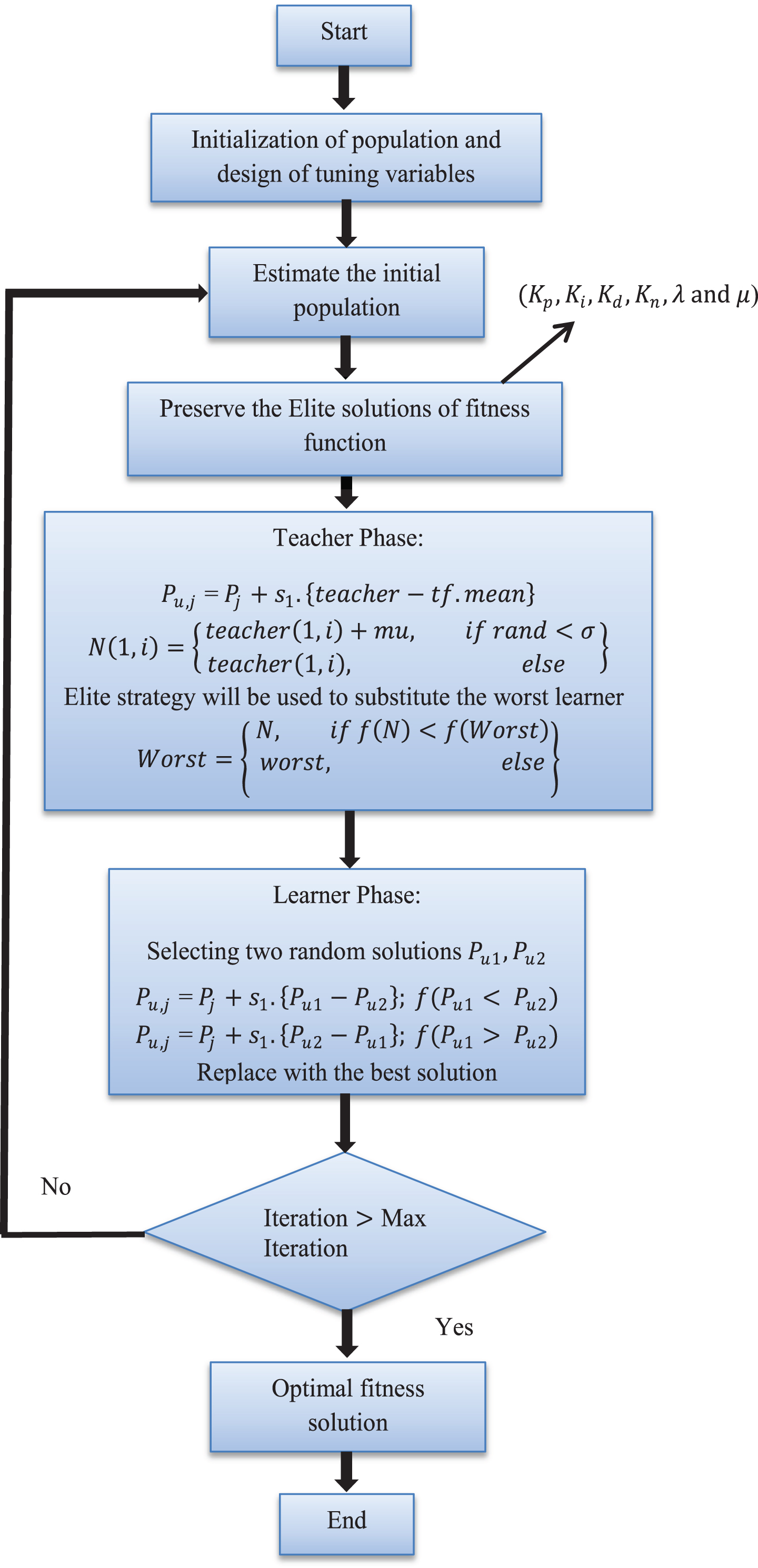
Flow chart of ETLBO algorithm.
Where, Pu,j is the newly generated individual based on P j . s1 is real random number lies between 0 and 1. tf termed as the teaching factor. N is a new solution found around the current best teacher. mu is a random mutation. σ is the mutation probability. Worst indicates the worst one in current population, f(.)means the cost function value of consistent solution. Number of iterations and Size of population were kept as 30 and 50 respectively while implementing ETLBO. A conjunction of ITAE and IAE was selected for cost function with having weight a = 0.5and b = 0.5 shown in Equation (15).
After initialization, evaluation of best cost function is observed in simulation by passing the designed parameter of PV System such that the system output approaches steady state, there by tracking of maximum power is obtained. The temperature and irradiation environments for the tuning phase were set in a standard test condition setting (1000 W/m2 and 25°C). Similar to FONPID controller tuning, the FONPID, FOPID, NPID and PID controller was also tuned. The obtained best cost value versus the iterations curve shown in Fig. 8.
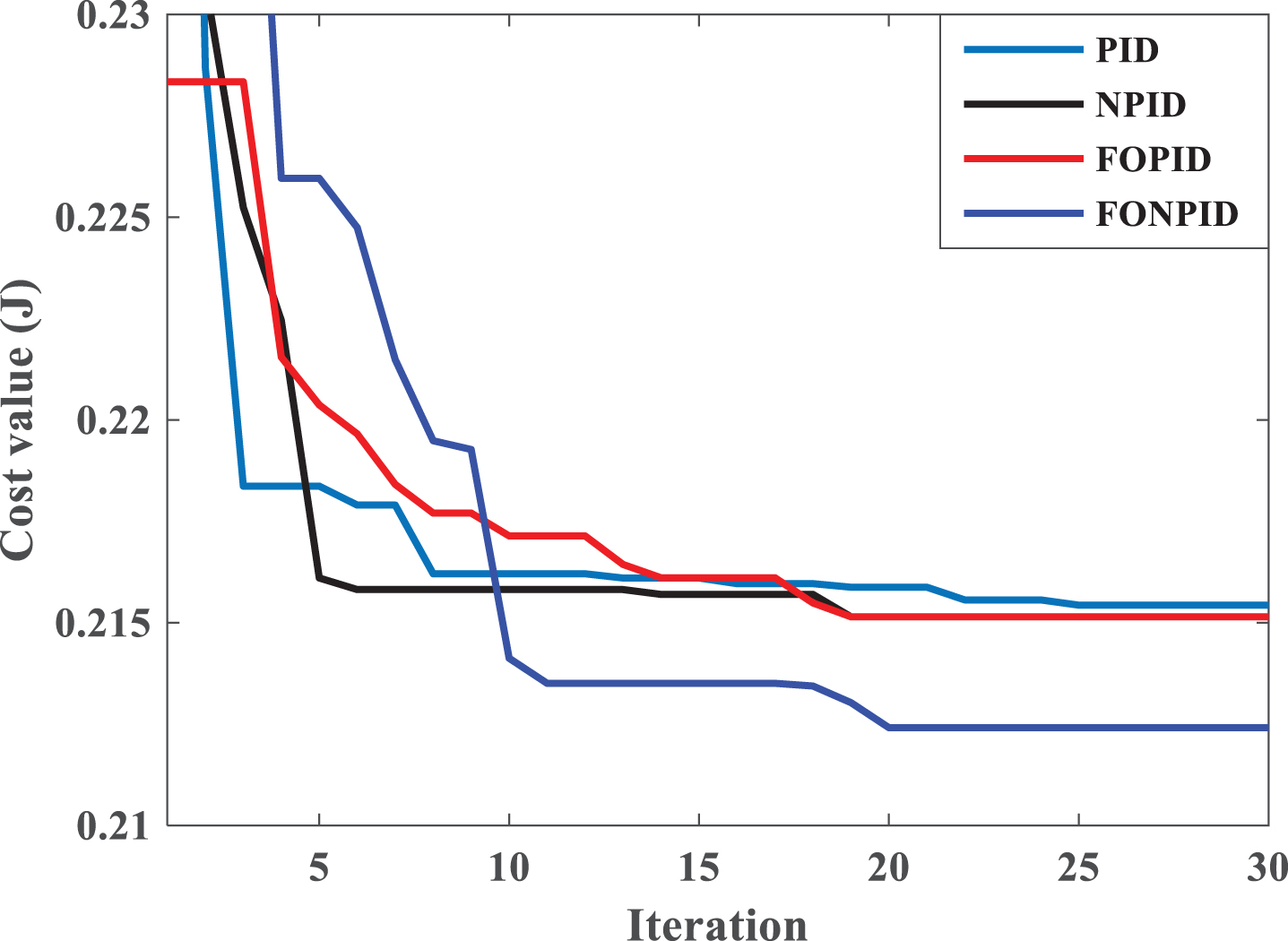
Variations in best cost value with respect to iteration of different controller.
Gains of the FONPID, FOPID, NPID and PID controller and the cost function value are shown in Table 2. Based on the observation from Table 2 it will conclude that best cost value of FONPID controller is lesser than the other controller.
Gains for FONPID, FOPID, NPID and PID controller
Efficacy of the proposed FONPID controller is compared to the PID, NPID and FOPID as well as to the conventional P & O based MPPT. To evaluate the performance, responses are recorded at variable level of and temperature and irradiation. Therefore, results are taken first under varying Irradiance at room temperature, secondly by varying temperature at STC irradiance profiles and finally, by varying both the irradiation and temperature. Performance comparisons of a controller of PV system are done in terms of achieved efficiency, ripple, transient and steady state behavior (rise time and settling time). Efficiency of this system calculated at any interval of time is obtained by Eq. (16).
It may be noted that irradiance varied from minimum 400 W/m2 to maximum 1000 W/m2 at constant temperature (25°C) shown in Fig. 9 (a). The MPPT responses that can achieve during that interval are shown in Fig. 9 (b), which indicate that the conventional MPPT controllers considerably depreciates its performance at different irradiation levels.
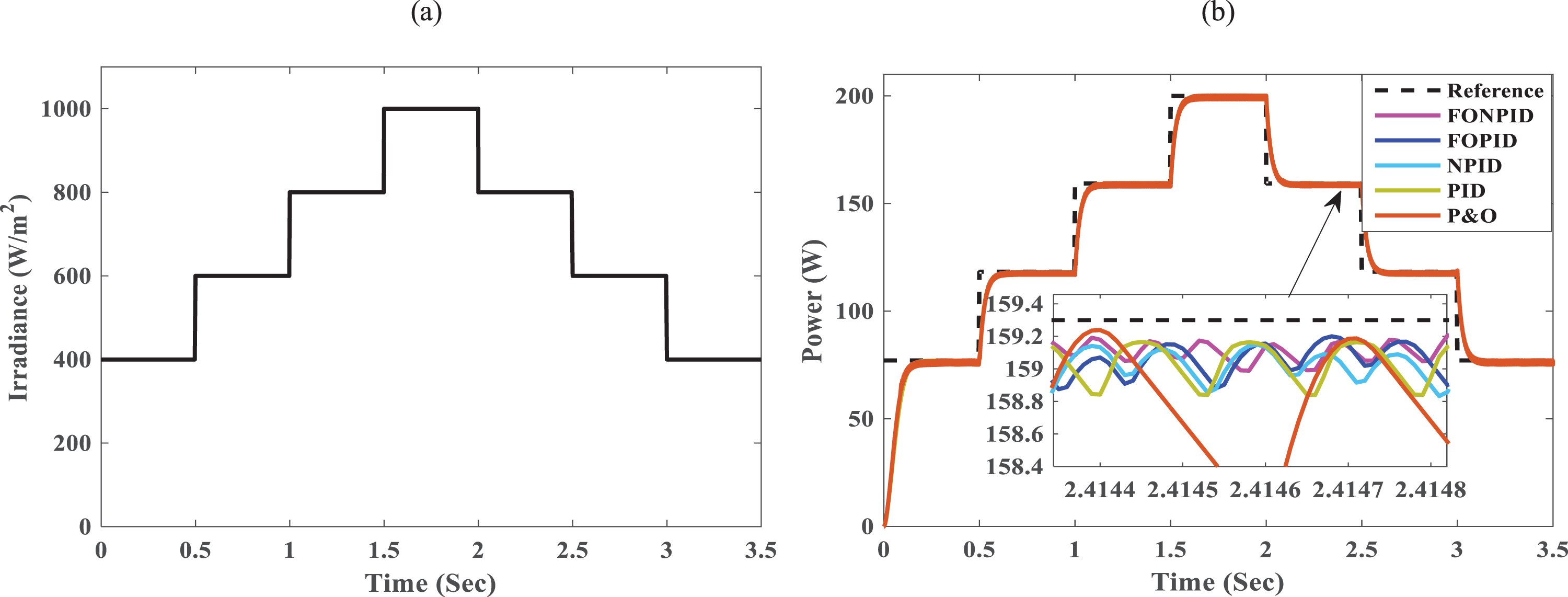
(a) Variation of irradiance (b) MPPT response under different irradiance.
Further, analysis of different controller observed at different instant of time with the aforementioned performance indices. Acquired results, in the form of graphical and arithmetical research, have been accessible successively for effective comparisons. The output voltage obtained by using boost converter with proposed technique under different irradiance level and the Solar PV cell out-put is shown in Fig. 10, which indicate that output voltage of boost converter changes by changing irradiance level with less ripple in output.
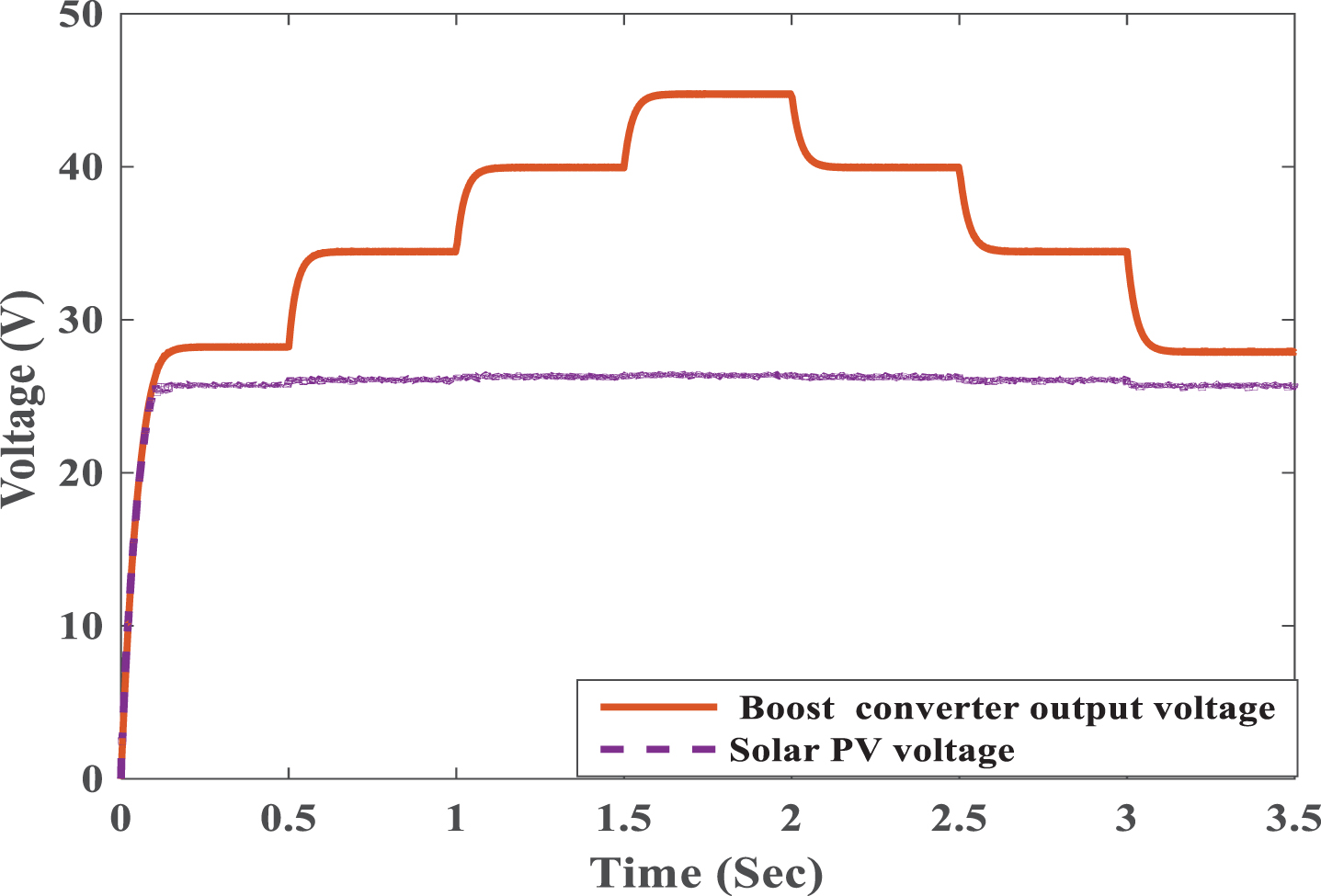
Boost converter output voltage and the solar PV cell output.
It may be noted that temperature varied from minimum 15°C to maximum 45°C W/m2 at STC irradiance level (1000 W/m2) shown in Fig. 11 (a). Figure 11 (b) shows the response of system under varying temperature. From figure, it has been observed that ripple content and system tracking efficiency is improved in case of proposed FONPID controller. The output voltage obtained by using boost converter with proposed technique under different irradiance level and the Solar PV cell output is shown in Fig. 12 under varying temperature.
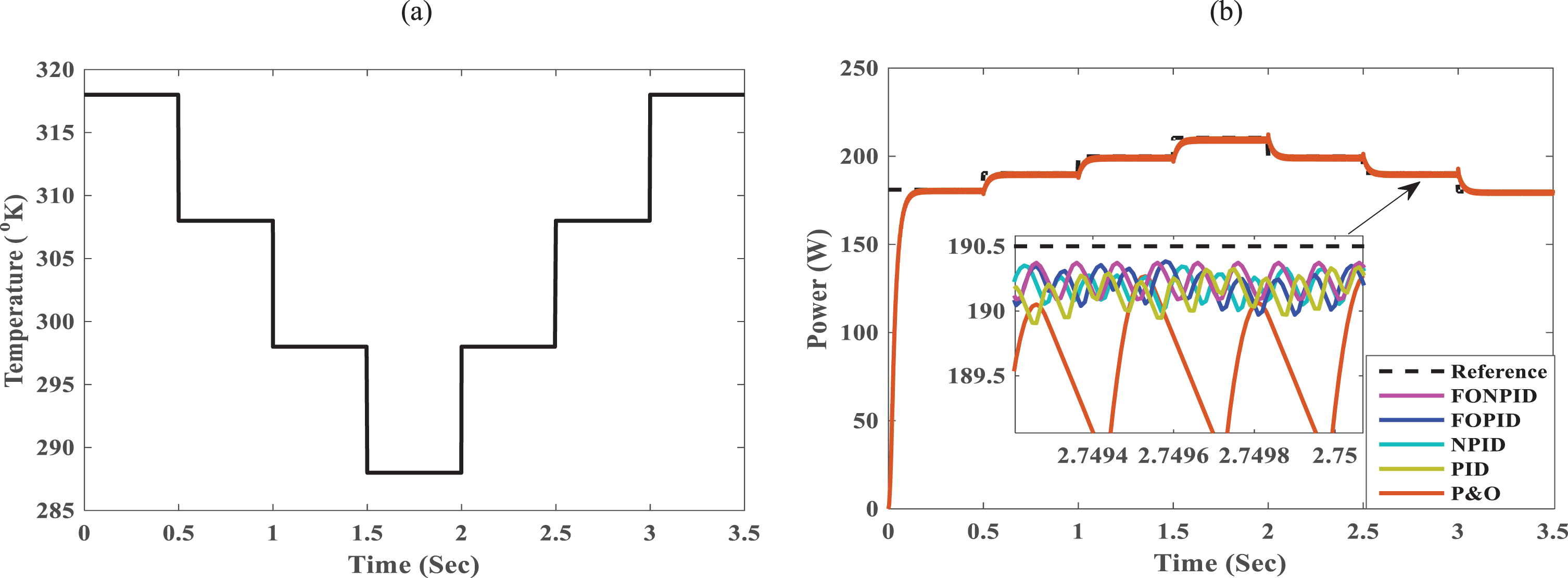
(a) Variation of temperature (b) MPPT response under different temperature.
Boost converter output voltage and the solar PV cell output under varying temperature.
In this case, the conjunction of and temperature and irradiance variations are considered which is shown in Fig. 13 (a) and (b). As seen from Figure, it comprises sharp variations in temperature and irradiation. It acts as an arbitrary and unpredicted profile under which operation of PV system done. The MPPT response at different instant of time is shown in Fig. 14 (a) and (b) which depict magnified MPPT responses. During the sudden changes of temperature and irradiance at low temperature, performance of the system affected with high ripples shown in Fig. 14 (b) which is reduced in proposed controller.
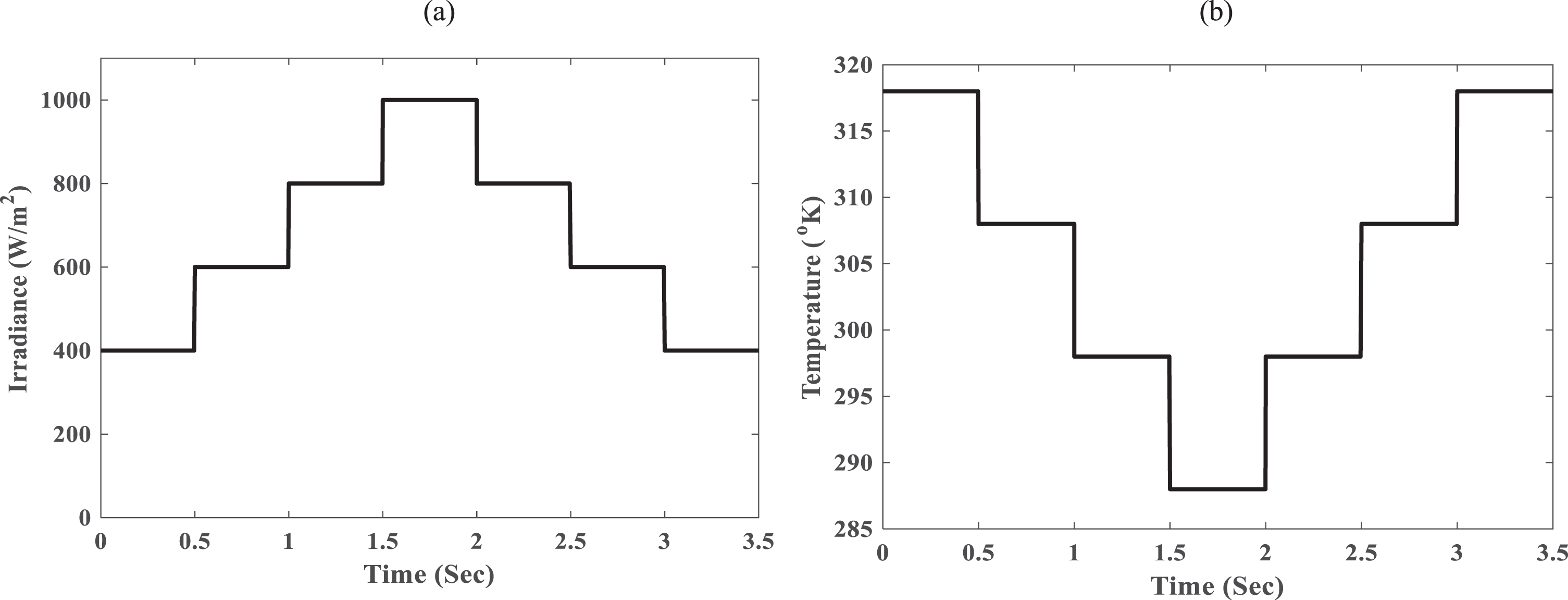
Variation of (a) Irradiance and (b) Temperature.
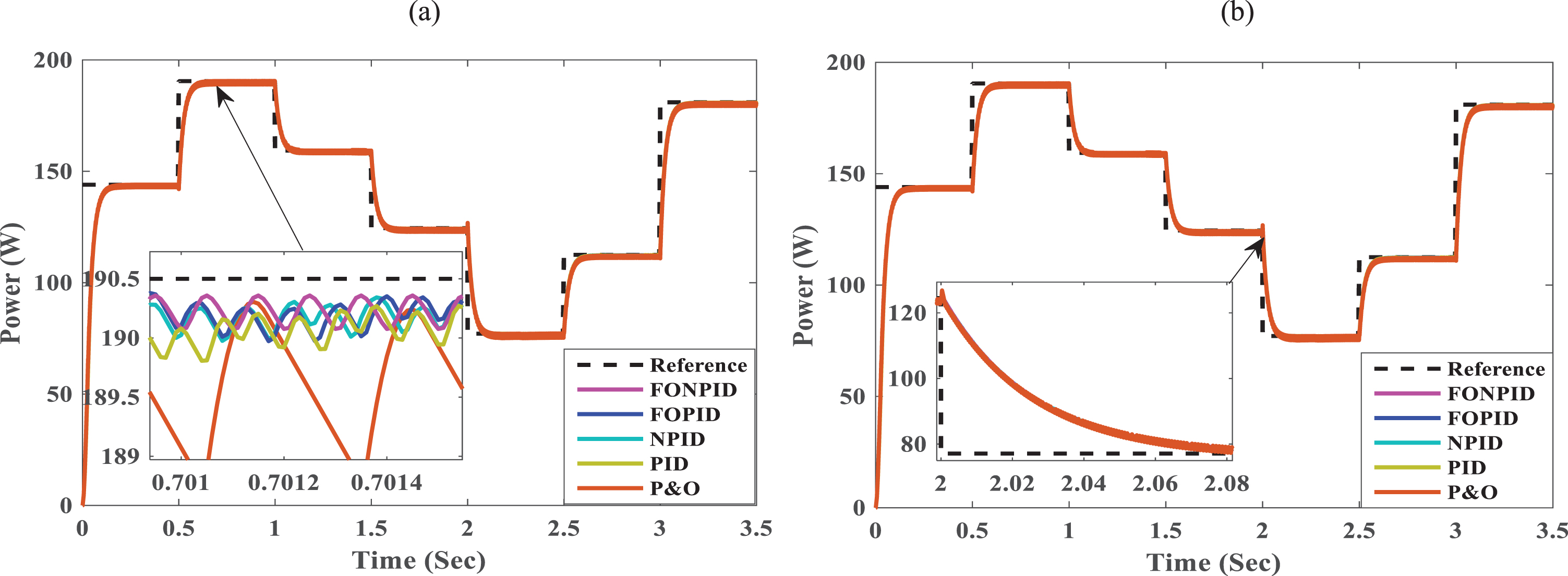
(a) and (b) MPPT response under varying irradiance and temperature.
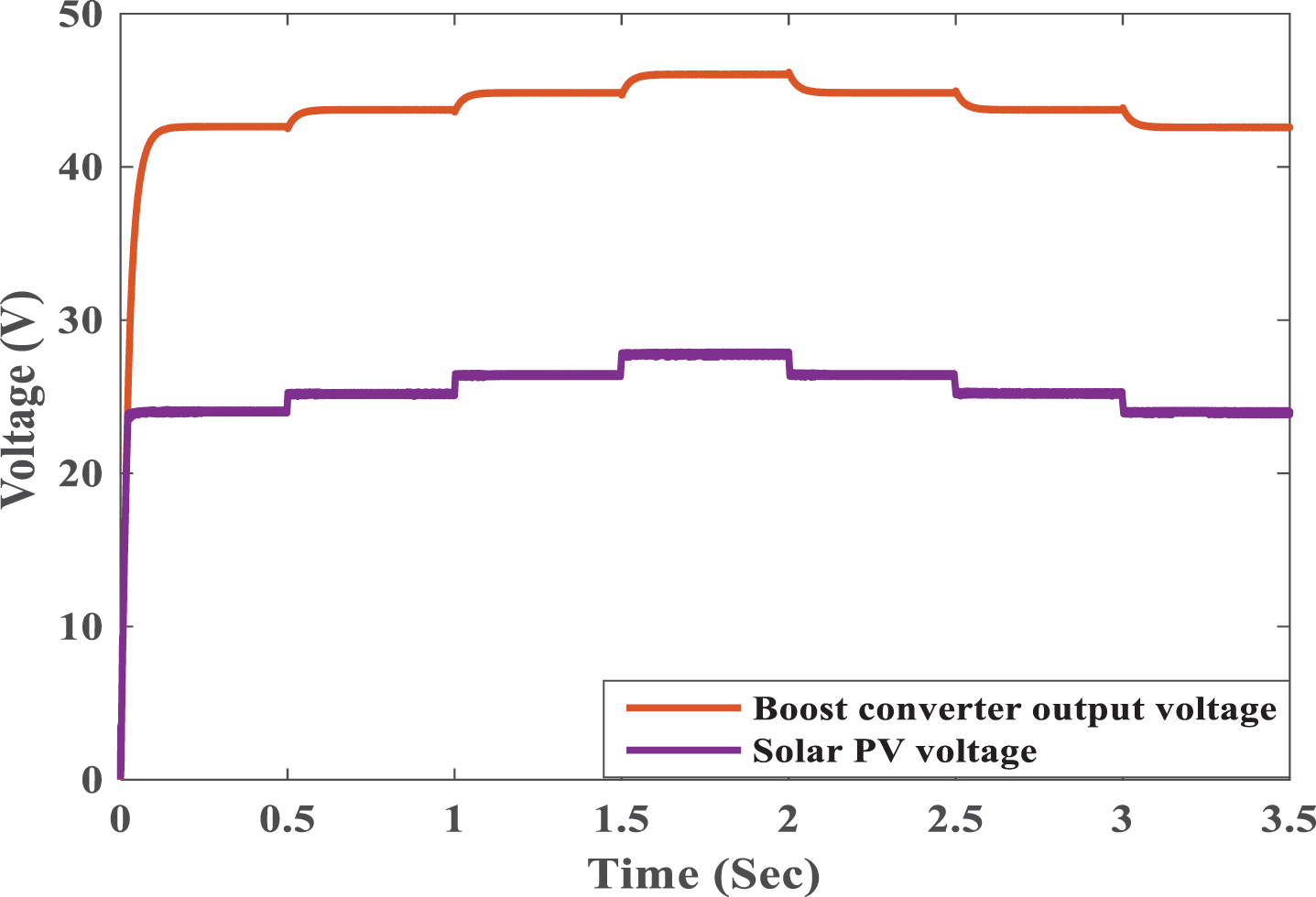
The output voltage obtained by using boost converter with proposed technique under different temperature and irradiance level is shown in Fig. 15, which depicts that voltages level changes by varying irradiance and temperature with less ripple in output voltage by using proposed technique.
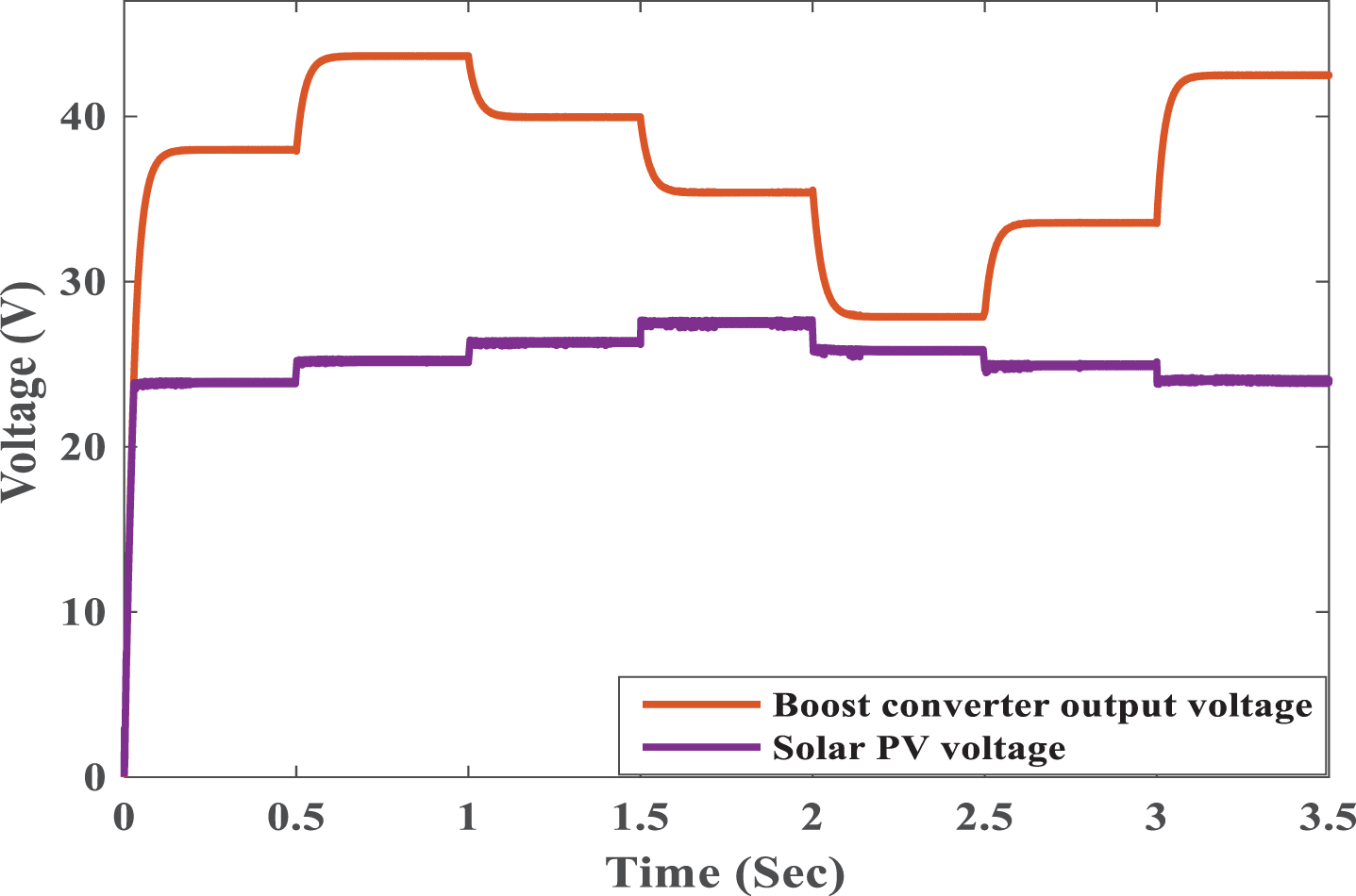
Boost converter output voltage and the solar PV cell output under varying irradiance and temperature.
Performance of controller is depicted at particular time interval shown in Table 3 which indicates that efficiency of the proposed system during steady state is maximum i.e. system has negligible power loss. Ripple in power observed during steady state and also the settling time is less in proposed FONPID controller.
Performance of different controller
In this paper, an efficient fractional order nonlinear PID (FONPID) controller has been proposed for MPPT in PV system. Proposed FONPID controller supports the fractional gain updating during runtime and fractional integral gain changes as a nonlinear function of the instantaneous error. For effective performance analysis, a commercial PV module KC200GT is considered. To investigate the efficacy of the proposed controller, wide ranging simulations were carried out for changes in the operating temperature and the irradiation level. The gains of controller are tuned by ETLBO algorithm in order that the proposed FONPID controller has least value of cost function. Proposed controller reduces the oscillations at MPP effectively showing better performance than other compared controllers such as FOPID, NPID, PID and P & O controller.