
Abstract
Cultural landscapes are cultural property and they are an illustration of the evolution of human society and the living environment over time. As cultural landscape is being valued more and more, the use of 3D modeling is becoming more and more important. As for the 3D reconstruction technology, most of the current methods are complicated in terms of network construction, use, and storage, and then affect the reconstruction efficiency of subsequent cultural landscape heritage. To obtain the 3D reconstruction technology with high reconstruction efficiency, this paper combines the circumferential binary feature extraction algorithm and cloud computing technology, and proposes a circumferential binary feature extraction and matching search method. The interior-point rate of the CBD algorithm in this paper is greater than 72%, which is higher than the interior point rate of other different algorithms, which indicates that the CBD algorithm in this paper is suitable for matching HD rotated images. The experimental results show that the circular binary features extracted by the article have strong adaptability and fast contrast rate. To better the 3D reconstruction of cultural landscape heritage in the later period, this paper also improves the 4PSC point cloud rough registration algorithm. The experimental results show that compared with other coarse registration algorithms, the improved point cloud coarse registration algorithm improves the registration accuracy and the registration effect is good, which proves the effectiveness of the algorithm.
Keywords
Introduction and literature review
Cultural landscapes are cultural properties and represent the “combined works of nature and of man” designated in Article 1 of the Operational Guidelines for the Implementation of the World Heritage Convention. They are illustrative of the evolution of human society and settlement over time, under the influence of the physical constraints and/or opportunities presented by their natural environment and of successive social, economic and cultural forces, both external and internal. Therefore, using cloud computing technology and constructing an effective 3D reconstruction algorithm model to obtain the 3D point cloud data of the building, carry out the reconstruction work of the cultural landscape, and obtain the 3D reconstruction model of the building to improve the building’s repairing ability [1].
Aiming at the effectiveness and efficient performance of 3D reconstruction technology, domestic and foreign research teams have conducted in-depth research on 3D reconstruction technology. In [2], estimates indicate that landscape openness continued throughout the Holocene (average landscape openness is about 50%). In [3], the author believes that combining archaeological discoveries with information from biological archives can reconstruct the cultural landscape and adapt to the region’s hot Mediterranean climate. In [4], the author argues that paleoecological analysis helps to reconstruct changing economic and cultural management and its impact on landscape and soil. In [5, 6], based on the digitization of aerial photos and screens of LandSat images, the authors obtained a classification of land use/cover dynamics over time, and used an ordinal number table from Amorrob to Kanamorob to evaluate each Land-use type semi-fungi. In world heritage sites, the use and management of indigenous knowledge, natural resources are rarely considered cultural value [7]. In [8], the author introduced the results of preliminary archeological and field surveys conducted in North Franconia, and also established regional prehistoric land-use models. In [9, 10], the author describes the virtual regression through 3D reconstruction and introduces the 3D reconstruction and visualization process of the castle. In [11], the authors propose a novel 3D reconstruction method that can perform dense and highly accurate reconstruction of insufficiently textured objects. The experimental results show that the 3D reconstruction accuracy of the Bayesian stereo matching algorithm can reach 0.08 mm when the distance between the object and the multi-probe system is 500 mm. In [12, 13], the author focused on the occlusion problem, provided a solution for self-occlusion and occlusion between objects and proposed a novel algorithm to solve the occlusion problem between objects. The results show that the algorithm has superior performance and can recognize 80% or less occluded objects. In [14], the author solved the problem of 3D reconstruction of indoor scenes with large vertical spans. Experimental results show that the algorithm has higher accuracy, better reconstruction effect and less point cloud registration running time.
With the development of cloud computing infrastructure and in-depth research, scientific computing processes, business processes, and collaborative application processes. In [15], the author mentioned that the resources in cloud computing are dynamic and proposed a scheduling method called staggered peaks. In [16], the authors proposed a Navy ADS (Availability-Distribution-Span) scheduling method to perform load balancing and schedule resources in the cloud environment. The method proposed in the article has produced effective results in terms of scheduling and load balancing to improve the performance of resource utilization in cloud environments [17]. In [18], the authors proposed a compile-time task replication strategy based on hybrid cloud computing to execute a fine-grained application of a directed acyclic graph (DAG) into a hybrid cloud computing environment. In [19], the author proposed a new method for determining objects and background regions. In [20], the authors developed an improved observer model to improve the problem that prediction capabilities in high-contrast and high-spatial-resolution resolution imaging tasks (including CT bone imaging) may be limited.
To obtain 3D reconstruction technology with high reconstruction efficiency, this paper combines the circular binary feature extraction algorithm and cloud computing technology, uses the FAST operator to detect key points, and uses image features to calculate key point feature directions to ensure the rotation invariance of features. To better the 3D reconstruction of cultural landscape heritage in the later period, this paper also improves the 4PSC point cloud rough registration algorithm. The experimental results show that compared with other coarse registration algorithms, the improved point cloud coarse registration algorithm improves the registration accuracy and the registration effect is good, which proves the effectiveness of the algorithm.
3D modeling technology and algorithm model
Related theoretical foundations of cloud computing
Cloud computing is developed based on grid computing, parallel computing, and utility computing. It is also the result of the mixed evolution of concepts such as virtualization and service-oriented architecture. The basic principle of cloud computing is to use remote server clusters and storage clusters, and virtualize them into distributed computing resources and storage resources, and provide them to Internet users with billing services, so that users can dynamically use computing resources and storage systems according to their needs.
According to the degree of virtualization, there are three types of cloud computing service models: (1) Software as a service. Service providers provide service consumers with a suite of applications that run on a cloud infrastructure vendor. Users can access these application suites through thin clients. (2) Platform as a service. Service providers provide programming languages and programming tools to service consumers. Consumers can develop their applications on this platform and then deploy them to the service provider’s cloud environment. Consumers do not need to manage or control the underlying cloud infrastructure, including networks, servers, operating systems, storage, etc. (3) Infrastructure as a service. What service providers provide to service consumers are computing resources, storage, networks, and other basic computing facilities. Consumers can deploy and run arbitrary software, including operating systems and applications.
3D modeling technology based on cloud computing
(1) Improved coarse registration of 4PSC point clouds
Suppose pe is the probability that four points in the randomly selected plane are expected to overlap in the point cloud, that is, the probability that the algorithm will succeed. p0 is the estimated proportion of the overlapping area between the two-point sets, so the number of iterations is as follows:
First, downsampling is performed on both the initial point set and the target point set, and the points that are sampled at the same time must be within the overlapping point cloud, which are recorded as the initial point set M and the target point set N, respectively.
Using the determinant to be non-zero, the situation where three points are collinear is eliminated, and the three points (a, b, c) obtained are three points that are far away and are not collinear.
The coordinates of point a (xa, ya, za), coordinates of point b (xb, yb, zb), coordinates of point c (xc, yc, zc), and coordinates of point d are (xd, yd, zd). Because the four points are coplanar and convenient to calculate, when calculating the intersection point e, the coordinates of point a on the two-dimensional plane are approximately (xa, ya). Similarly, the coordinates of point b are (xb, yb) and the coordinates of point c are (xc, yc), and the coordinates of point d are (xd, yd). Find the equation Lab of the diagonal line ab and the equation Lcd of the diagonal line cd, and then use the two equations equal to Lab = Lcd to find the intersection e connected by the diagonal line. The formula is as follows:
Coplanar invariants are coplanar four points in different three-dimensional coordinate systems. Any rotation and translation can ensure that under rigid body transformation, coplanar invariants will never change. Therefore, after selecting four coplanar points in the initial point set M and solving the intersection points of the connected line segments, the corresponding coplanar invariants are calculated. The specific formula is as follows:
(2) 3D reconstruction algorithm of Poisson surface
For a given entity M, its boundary is ∂M, and χM is used to represent the indicator function of M,
Of course, the surface integral cannot be calculated directly, because the surface geometry of the solid body is not known. However, the input set of directed points provides sufficiently accurate information to approximate discretely summed integrals. Specifically, the boundary ∂M is used to divide into different patches P s ⊂ ∂M. With the value of the sampling point s · p and the area of the patch, the integral can be calculated. The formula is as follows:
(1) Calculation of circle points
Let’s take the circled pixel with the FAST key point as the center of the circle and a circle with a radius of 10 as an example to introduce the process of drawing an eighth circle by this circle drawing method: Enter the coordinates of the circle radius r and the center C (feature point) as (xC, yC), with the center C as the origin (0, 0), and get the first relative point on the circumference (x0, y0)=(0, R). Calculate the initial value p0 = 1-r of the decision parameter pk. At each xk position, starting from k = 0, complete the following test: if pk < 0, the next point of the circle whose center is at (0, 0) is (xk +1, yk), and pk+1 = p
k
+ 2xk+1 + 1; otherwise, the next point of the circle is (xk +1, yk), and pk+1 = p
k
+ 2xk+1 + 1 -2yk+1. Among them, 2xk +1 = 2xk +2 and 2yk +1 = 2yk-2. Determine the symmetry points in the other seven octets. Repeat Step 3 Step 5 until x > y.
(2) Descriptor calculation
Because the key points obtained by the FAST operator have no direction, this paper first calculates the binary center of gravity coordinates of the neighborhood image of the FAST key point C, calculates the ratio of the barycentric coordinates with the arctangent function, and uses the angle obtained as the direction of the CBD feature. When calculating the two-dimensional barycentric coordinates, first calculate the moments m00, m10, and the cumulative sum m01 in the two directions:
Among them,
(3) Bitmap local sensitive hashing algorithm (bmLSH)
In the extraction of CBD circular binary strings, it was learned that the binary strings were obtained by comparing the gray levels of the corresponding point pairs, and the gray levels of the i-th point pair were Ia and Ib, respectively. The state of 1 or 1 is represented by Tiab, and the binary bits obtained by L such point pairs constitute a binary string of length L, each 8 bits constitute an unsigned character type number, stored in memory, and Fj means unsigned the number of character types, as shown in the formula.
For any two high-dimensional binary features S1 and S2, if the Hamming distance between them is less than d1, the probability PH that they are placed in the same bucket is greater, which satisfies the formula:
Any two high-dimensional binary features S1 and S2, if the Hamming distance between them is greater than d2, they are put into the same bucket with a smaller probability p2 < p1, as shown in the formula:
In the above formula, |·| refers to the number of 1 s in the new binary number after XORing the two binary numbers, which means the Hamming distance, d2 > d1. It should be noted that because the distance of the projection function values of the two binary features is the distance ∥h (S1) - h (S2)∥ of the two high-dimensional binary features S1 and S2, the distribution of this distance is proportional to the Hamming distance |s1 ⊗ s2| between the two binary features, so p2 < p1.
HD image data source
(1) Source of algorithm test data
We use high-definition image database for algorithm detection and analysis. The research and development goals of the point feature acquisition algorithm are simple in principle and fast in matching. In the experimental test in this chapter, the proposed CBD algorithm is compared with four algorithms, such as ORB, SURF, etc. In this image collection, there are 7 scenes, such as graffiti, boats, walls, Leuven University, bicycles, Columbia University, and trees. Use the graffiti atlas to test the CBD high-definition mirror image; use the ship atlas to test the high-definition scaling and rotating images; use the wall atlas to test the high-resolution perspective image; Leuven atlas to test the high-resolution light change image; the bicycle atlas to test the high-resolution blurred image; the Columbia HD image atlas test matches the JPEG map; the treemap set is used to test the HD match runtime. In these 7 kinds of image sets, the sample selection of each image set is shown in Table 1. 600 images of each high-definition image set were used as training samples and 1200 were used as test samples. The degree of change corresponding to each encoded image was different.
Number of samples of 8 HD image datasets
Number of samples of 8 HD image datasets
(2) Source of 3D modeling data
We used the Lidar dataset (Table 2) to test multi-resolution images of cultural landscape heritage. This thesis uses a combination of INFINITE 2.0 seven-axis articulated arm measuring machine and Handyscan3D structured light 3D laser scanner to obtain; for large volume or area entities can use station-mounted 3D laser scanners, such as murals, stone Buddha, ancient buildings, etc. The Lidar data set is divided into 6 small high-definition image sets, including mural image sets, stone Buddha image sets, Chinese architectural image sets, western architectural image sets, natural landscape image sets, and human landscape image sets. The six data sets are composed of a test sample set and a training sample set, and the specific sample numbers and distributions are shown in Table 2.
Multi-resolution modeling samples of cultural landscape heritage
This article is a simulation experiment on Windows 10 64-bit system based on Matlab 2016 platform. The improved 4PSC point cloud coarse registration algorithm and 3D reconstruction technology are verified, and the experimental results are compared and analyzed. The environment configuration used in this paper’s simulation experiment is shown in Table 3.
Configuration of the experimental environment
Configuration of the experimental environment
The experiment uses a brute force search strategy to search for matching features. The more interior points occupy the number of matching points, the better the matching effect. In the experiment, first, extract the CBD features of the left and right images, use the brute force search method to search the matching features of the two images, calculate the left and right image consistency matrix according to the key point coordinates corresponding to the matching features, and calculate the reprojection of the matching points of the two images based on the consistency matrix. See Fig 1 for the detailed experimental scheme of circumferential binary feature extraction.
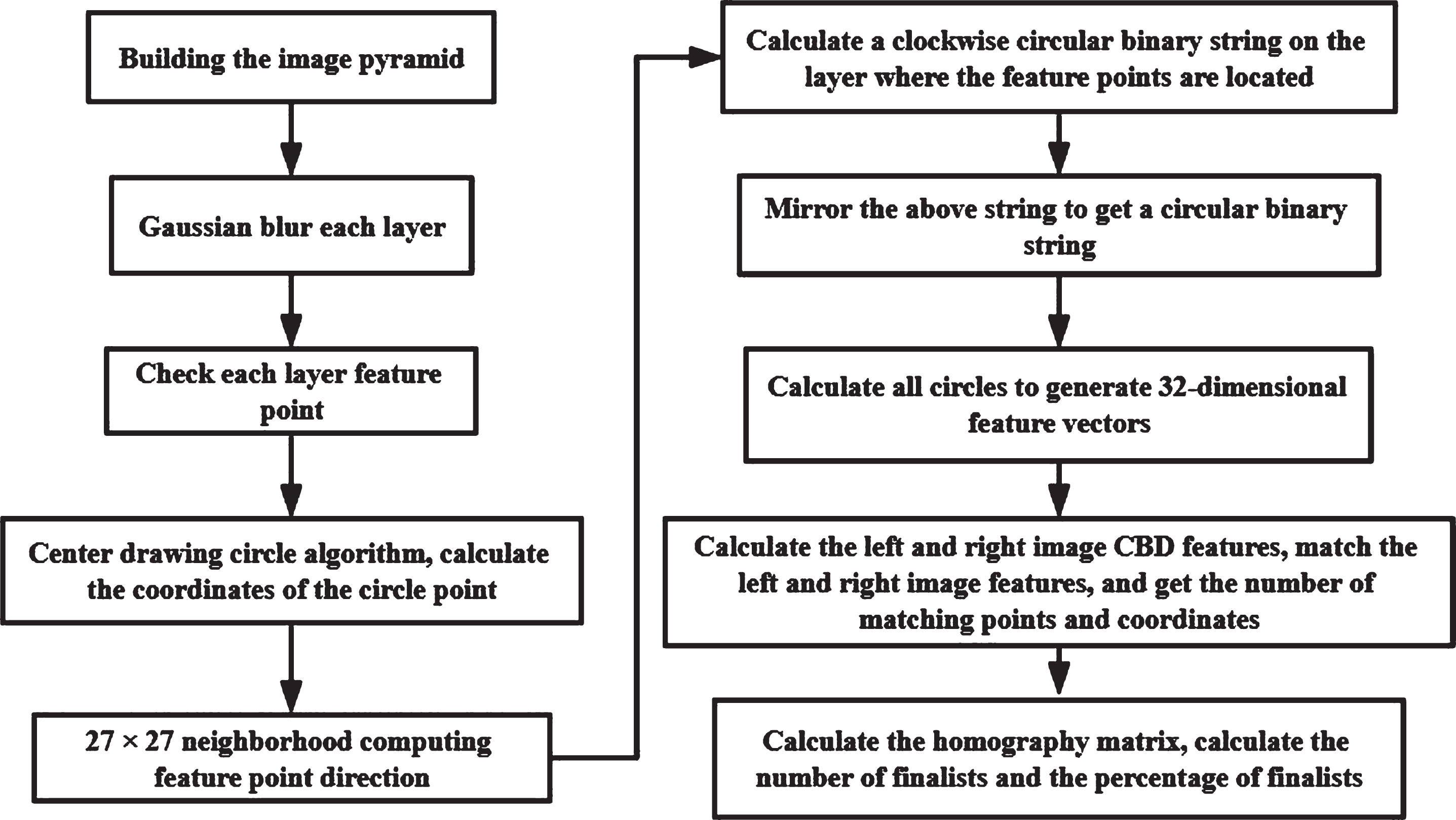
Circular binary feature extraction experiment flowchart.
(1) Bitset optimization query
In this paper, the bit set is used to determine whether a key corresponding feature vector exists in the hash table and the corresponding file. The English word of the bit set is bitset, because it can quickly determine whether the data exists, so use it to improve the search rate of matching ORB features. When querying each hash table, calculate the feature key according to the mask M of each hash table, and use the following formula to determine the bucket of the hash table. There are no matching feature labels in the formula. When the value of the formula is not 0, it indicates that there is a matching feature; when the value of the formula is 0, there is no matching feature in the hash table.
(2) Feature matching judgment
According to each label in the bucket, the corresponding feature is found, and the dissimilarity between the feature and the current right feature is calculated. As shown in the following formula, use the nearest neighbor ratio to determine whether the two ORB features match. If R is less than the set ratio, the two ORB features match.
Analysis of cultural landscape heritage feature extraction results
(1) Rotation feature
To verify that the CBD features are suitable for matching HD mirrored images, the Lena image rotated by 30° to 330° was extracted for CBD features for testing. In the test, the original image was a Lena image, and 110 high-resolution rotated images were used as matching targets. In the test, the source Lena image extracted 1163 features, and the other 110 high-resolution rotated images each extracted 1450 CBD features. As shown in Fig. 2 (a), it is the number of matching points and interior points (ie, finalists) of the Lena image. As shown in Fig. 2 (b), the coordinate axis is the matching interior-point rate in the vertical direction, and the degree of rotation of the image in the horizontal direction. According to the comparison in Fig. 2 (b), when matching images with different rotation angles, the CBD algorithm in this article has an internal point rate greater than 72%, which is higher than the BRISK algorithm. As shown in Fig. 2 (a), the matching interior-point ratio of the CBD algorithm in this paper is very high, indicating that the CBD algorithm in this paper is suitable for matching HD rotated images.

Rotation-invariant matching results.
(2) Mirror characteristics
As shown in Fig. 3 (a), when the CBD algorithm is used to match the graffiti mirror image in the experiment, the number of matching features searched is greater than 2500, and the interior point rate of the corresponding coordinate points of the matching feature is greater than 90%, indicating that the CBD algorithm in this paper is suitable for matching horizontal mirroring. ORB algorithm matches horizontal mirror image with an internal point rate of less than 15%, which can be used for horizontal mirror image matching; the internal point rate of the FREAK algorithm is less than 29%, can be used to match horizontally mirrored images.
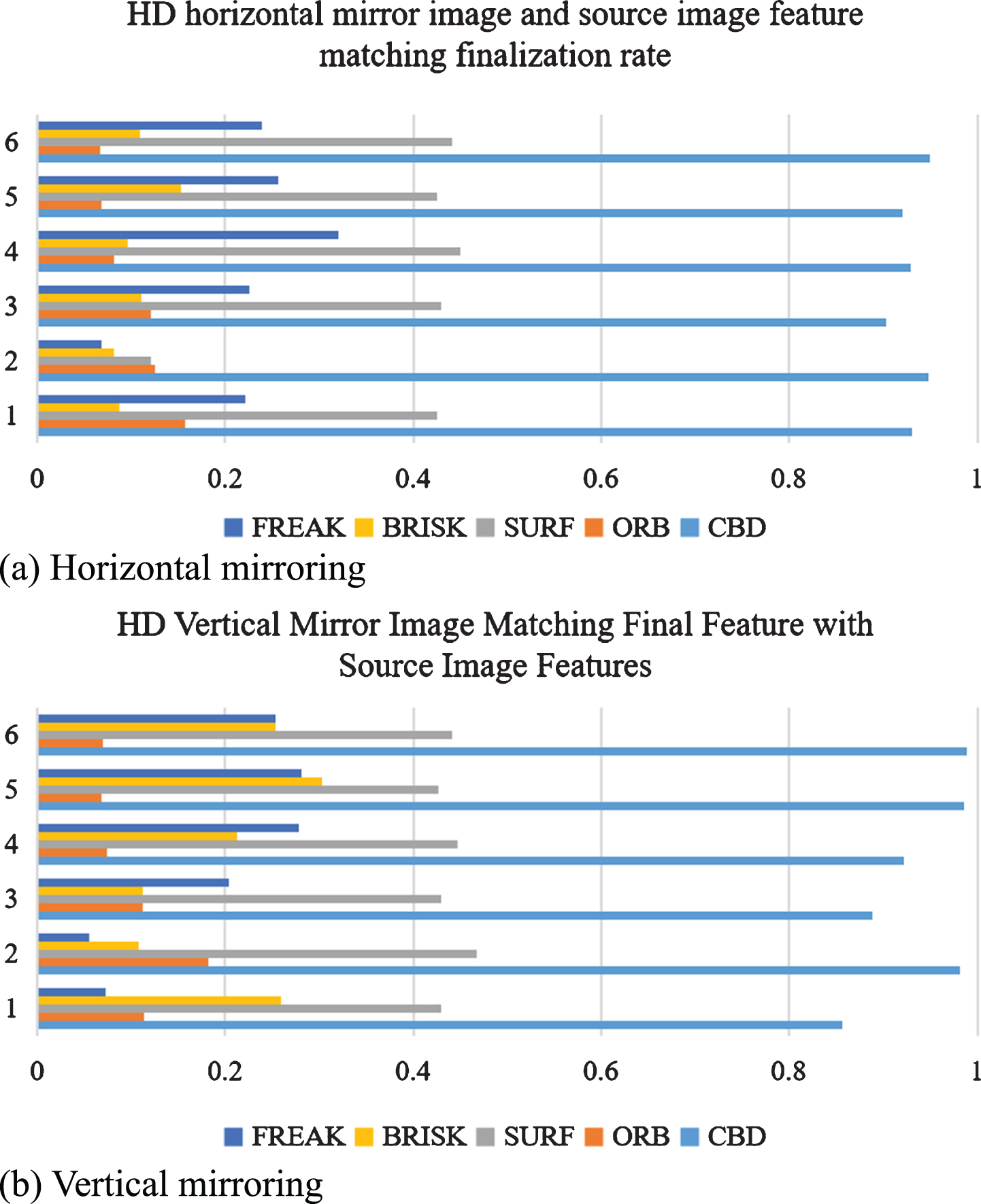
Image invariance matching results.
According to Fig. 3 (a) and Fig. 3 (b), it is known that the CBD algorithm extracted 3,000 features of the two images during the experiment. The CBD algorithm proposed in this paper finds a large number of matching features, and the interior point rate corresponding to the key points is greater than 85% (as shown in Fig. 3b), which is slightly better than other algorithms, indicating that the CBD algorithm in this paper is suitable for matching vertical mirror images. The BRISK algorithm has an interior point rate of more than 10%.
The CBD algorithm in this paper has a large number of matching features. The internal point rate of the key points corresponding to the features is greater than 77.4%, which is suitable for matching horizontal and vertical mirror images. The ORB method has an internal point rate of more than 76% for horizontal and vertical mirror images. For matching horizontal and vertical mirror images; the matching interior-point rate of the SURF algorithm is 100%; the internal point rate of the BRISK algorithm is about 80%. In conclusion, the CBD algorithm proposed in this paper is suitable for image matching with different mirror changes. Algorithms such as ORB and BRISK are suitable for matching horizontally and vertically mirrored images because they are suitable for matching rotated images.
(1) Coarse registration
We train and test the “Chinese architectural atlas” in high-definition image data:
For “Chinese architecture atlas”, the improved 4psc point cloud coarse registration algorithm and 4psc, PFH based point cloud coarse registration algorithm and fpfh based point cloud coarse registration algorithm are shown in Fig. 4 for the registration time and accuracy:
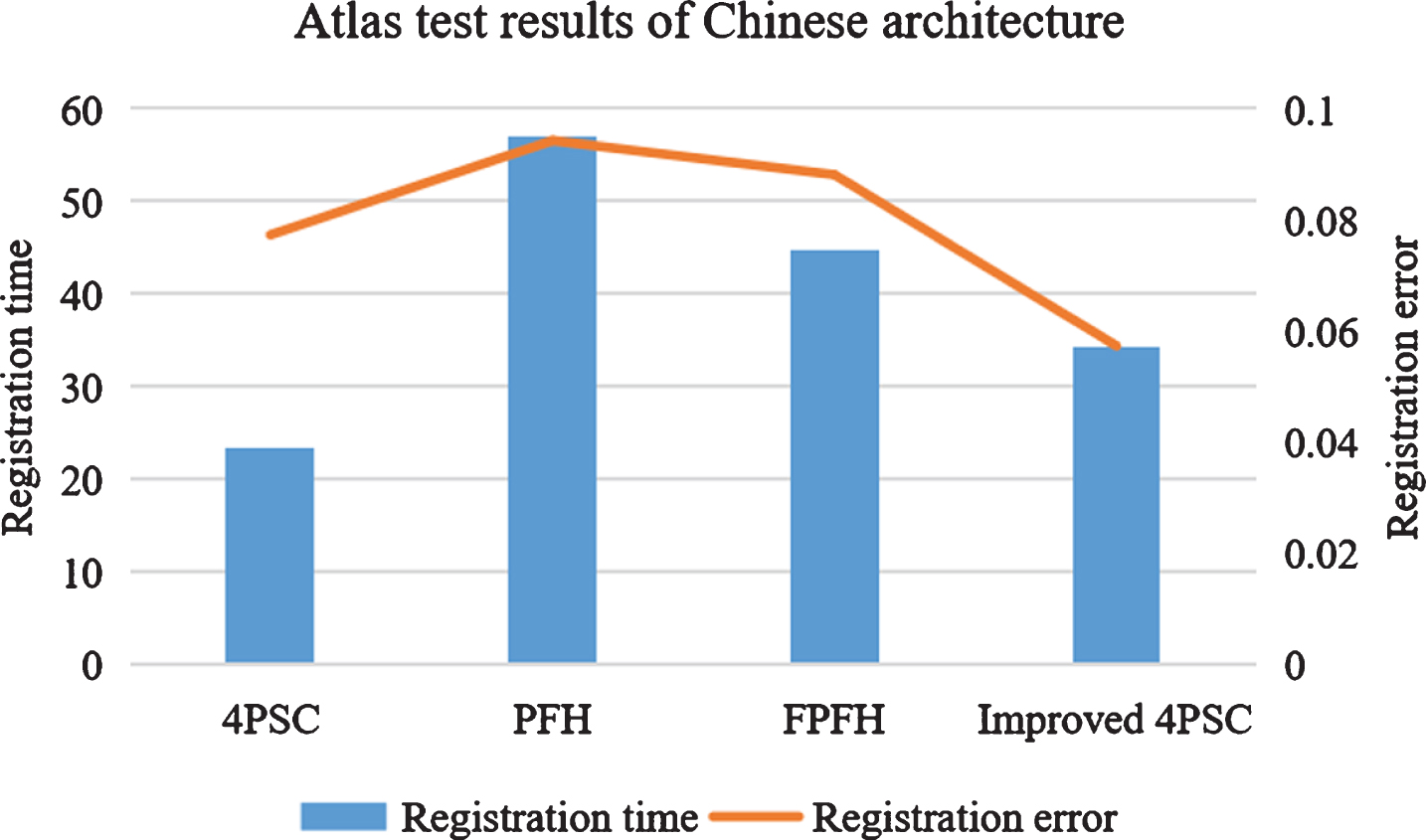
Comparison of rough registration algorithms for “Chinese Architecture Atlas”.
From the comparison between the registration error and registration time of “Chinese architectural atlas” in the above table, it can be concluded that the registration speed of the improved 4PSC point cloud coarse registration algorithm is slower than that of 4PSC algorithm, but faster than that of PFH feature description operator and FPFH feature description operator, and better than the other three algorithms in terms of registration accuracy.
We train and test the “Western-style building atlas” in high-definition image data:
For the “Western-style building atlas”, the improved 4PCS point cloud coarse registration algorithm and 4PCS, the point cloud rough registration algorithm based on the PPH feature description operator, and the point cloud rough registration algorithm based on the FPH feature description operator are registered. The comparison between time and registration accuracy is shown in Fig. 5.

Comparison of rough registration algorithms for “Western-style building atlas”.
From the comparison of the registration error and registration time of the “Western-style building atlas” in the above table, it can be concluded that the registration rate of the improved 4PSC point cloud coarse registration algorithm is slower than the 4PSC algorithm, but it is slower than that based on the PFH feature description. The coarse registration speed of the operator and the coarse registration algorithm based on the FPFH feature description operator are relatively fast, and they are significantly better than the other three algorithms in terms of registration accuracy.
Comparing the results of different coarse registration algorithms obtained from Experiment 1 “Chinese Architecture Atlas” and Experiment 2 “Western Architecture Atlas”, it can be obtained that the “Western Architecture Atlas” is better than “Chinese” in terms of registration rate and registration accuracy. The results obtained by the “Architecture Atlas” are weaker, mainly because the two-point clouds of the “Western-style Architectural Atlas” have fewer overlapping areas, and the shape of the two-point clouds is not complete.
(2) Fine registration
We train and test the “natural landscape atlas” in HD image data:
For the “natural landscape atlas”, the coarse registration algorithm, 4PSC, the point cloud coarse registration algorithm based on the PFH feature description operator, and the point cloud obtained based on the FPFH feature description operator are used for fine registration and registered in the comparison between time and registration accuracy is shown in Fig. 6:
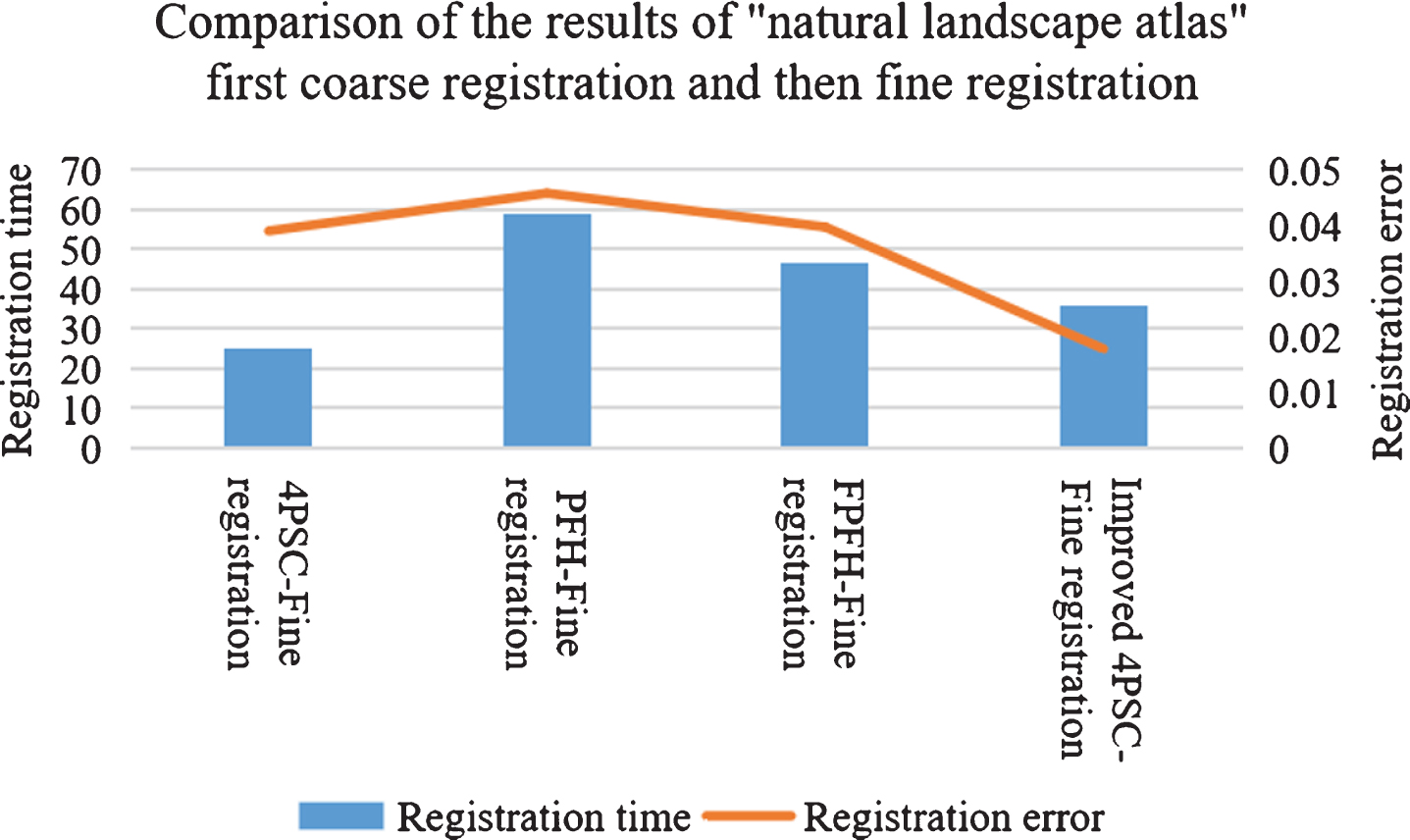
Comparison of the results of “natural landscape atlas” first coarse registration and then fine registration.
From the comparison of the registration errors in the above table, it can be concluded that, for the “natural landscape atlas”, the first 4PSC point cloud coarse registration algorithm and then the fine registration rate are slower than the 4PSC and then the registration rate. However, it is better than the coarse registration of the PFH characterization operator, then the fine registration, and the coarse registration of the FPFH characterization operator, and then the fine registration. However, the registration accuracy is better than the results obtained by other coarse registration algorithms.
We train and test the “Human Landscape Atlas” in HD image data:
For the “Human Landscape Atlas”, the point clouds obtained by the rough registration algorithm, 4PSC, the point cloud rough registration algorithm based on the PFH feature description operator, and the point cloud rough registration algorithm based on the FPFH feature description operator, perform fine registration, and compare the registration time and registration accuracy as shown in Fig. 7:
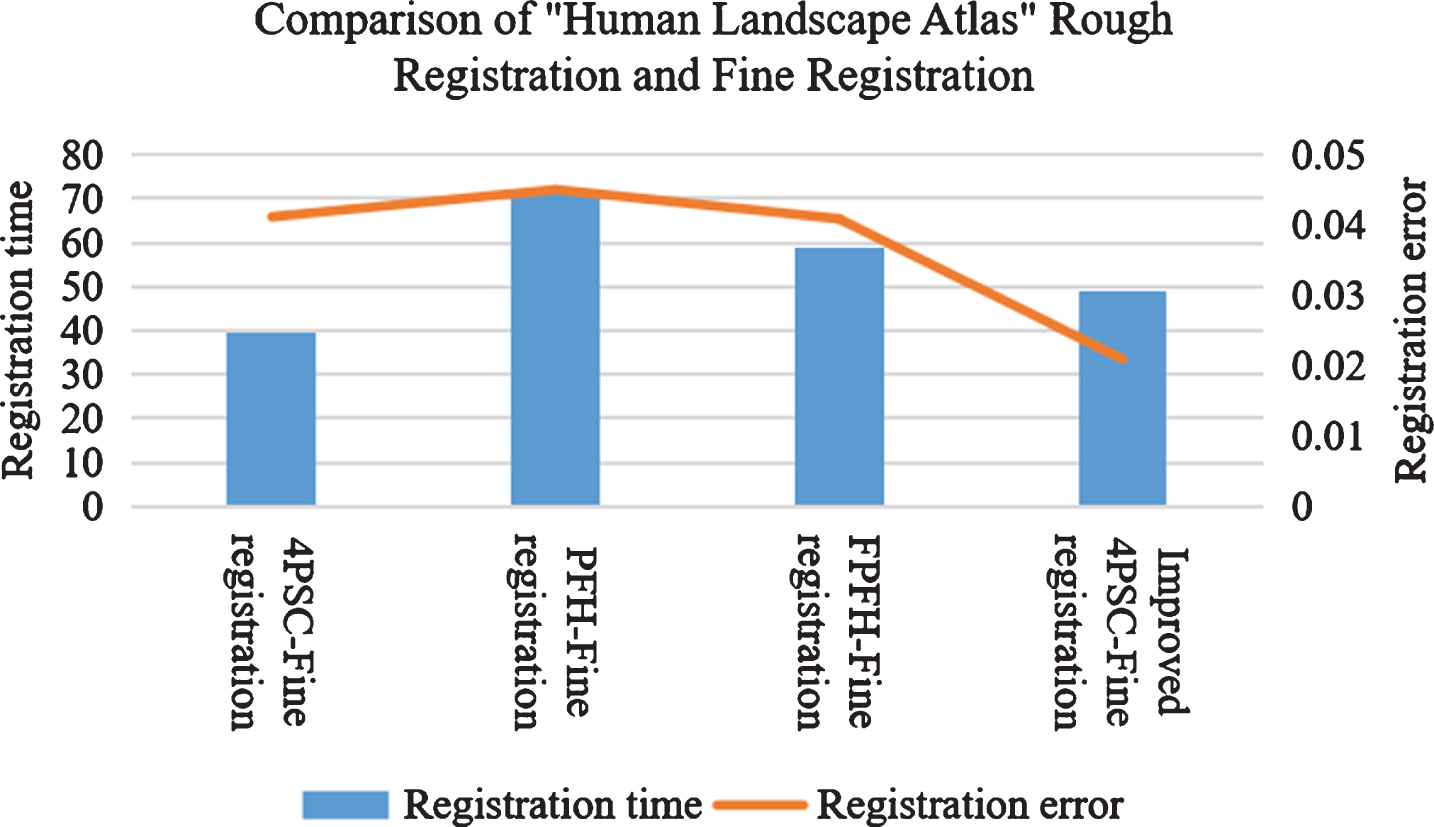
Comparison of the results of “Human Landscape Atlas” after coarse registration and fine registration.
From the comparison of the registration errors in the above table, it can be concluded that for the “Human Landscape Atlas”, the improved registration rate of the 4PSC point cloud coarse registration algorithm and then the fine registration rate is slower than the 4PSC and then registration rate. However, the registration accuracy is better than the results obtained by other coarse registration algorithms. Comparing the results of “natural landscape atlas” and “human landscape atlas” respectively through different coarse registration algorithms and then refined registration, it can be found that the registration effect of “human landscape atlas” is weaker because of “human landscape atlas” the set of two-point clouds has fewer overlapping areas, the shape of the two-point clouds is not complete, and the point clouds after coarse registration caused by fewer corresponding points fail to provide a relatively good initial position for fine registration.
(1) Three-dimensional reconstruction attitude estimation.
The experiment uses a binocular camera to obtain two images of the target object, and uses a stereo matching algorithm to calculate the three-dimensional coordinates of the target object based on the left image. The distance from the ZED mini binocular camera to the box is from 200 mm to 500 mm. When the box moves from 204 mm to 504 mm, the rotation angle is a three-dimensional vector and the distance is a three-dimensional translation vector.
(2) Error analysis
In the experiment, two kinds of baseline length of zed binocular stereo cameras are used. One is that the baseline length of the ordinary camera is 120 mm, the other is that the baseline length of the ZED mini camera is 63 mm, and the number of focus pixels is 1400 and 700 respectively. Therefore, the theoretical error of the depth measurement of the target object is analyzed. For 3D reconstruction of the ZED Mini binocular stereo camera, the minimum distance of the target object is 0.15 m, and the distance from the binocular camera to the target object increases from 150 mm to 600 mm. Using the parameters of the ZED mini camera, the error of depth measurement of the target object is calculated in mm, as shown in Table 5. It can be selected according to the theoretical error and the accuracy requirements of the project equipment with different parameters.
3D reconstruction pose estimation
3D reconstruction pose estimation
Measurement errors of 3D reconstruction
When the camera is 150 mm from the target object, the average measurement error is 0.293; when the camera is 200 mm from the target object, the average measurement error is 0.52; when it is 250 mm from the target object, the average measurement error is 0.81; when it is 300 mm from the target object, the average measurement error is 1.168; when the distance from the target object is 350 mm, the measurement error is 1.59 mm; when the distance from the target object is 400 mm, the measurement error is 2.073 mm; when the distance is 450 mm from the target object, the measurement error is 2.628; when it is 500 mm from the target object, the measurement error is 3.243 mm; when the camera is 550 mm from the target object, the average measurement error is 3.923; when the camera is 600 mm from the target object, the average measurement error is 4.668 mm. The maximum measurement error at each distance is within the theoretical error range.
In this paper, a combination of circumferential binary feature extraction algorithm and bitmap local sensitive hashing algorithm is proposed, and a binary feature extraction and matching search method is proposed. The CBD algorithm in this paper searches for a large number of matching features, and the interior point rate of the key points corresponding to the features is greater than 77.4%, which is suitable for matching horizontal and vertical mirror images; the ORB method is suitable for matching the horizontal and vertical mirror images with internal point rates greater than 76%, which is suitable for matched horizontally and vertically mirrored images. The experimental results show that the circular binary features extracted by the article have strong adaptability and fast contrast rate.
This paper improves the 4PSC point cloud coarse registration algorithm. The experimental results show that compared with other coarse registration algorithms, the improved point cloud coarse registration algorithm improves the registration accuracy and the registration effect is good, which proves the effectiveness of the algorithm. At the same time, the 3D reconstruction technology in this paper is effective for reconstructing cultural landscape In terms of heritage, the effect is outstanding.
Footnotes
Acknowledgements
This work was supported by the Natural Science Foundation of China (No. 31560231 and 51968064).