
Abstract
In this paper, a two-degree-of-freedom manipulator is taken as the research object, and the relevant dynamic model is established, the iterative learning controller is designed, and the trajectory tracking control of the manipulator is carried out by using the iterative learning control algorithm. Iterative learning control (ILC) has a better control effect on a two-degree-of-freedom manipulator with repetitive motion characteristics for its non-linear system. In the case of disturbance, a PD-type iterative learning control law is designed. With the increasing number of iterations of the system, the required correction interval is shortened by modifying the gain matrix in real time in the interval, so as to accelerate the convergence speed. The simulation results show that the convergence speed of PD-type ILC is faster than that of P-type ILC, and the convergence effect of PD-type ILC with disturbance is better than that of traditional disturbance-type ILC. The industrial robot system is guaranteed to have good dynamic performance.
Introduction
The level of industrial automation is a symbol of the national industrial level. Since the United States developed the world’s first industrial robot arm in 1958, many researchers have applied research and application to industrial robot arms in different industries, and now they have been applied in many industries. For example: automotive, home appliances, semiconductors, chemicals, medical and other industries. From the generation of industrial robots to the beginning of this century, Japan, the United States, Europe and other developed countries accounted for the majority of industrial robot’s investment and application, such as the products of ABB, KUKA, Yaskawa and FANUC in 2017. The market share is over 50%. Since the beginning of the 21st century, China’s industry has entered a period of rapid development, especially after China’s development strategy of “Made in China 2025”, Shenyang Xinsong, Nanjing Eston, Anhui Wuhu Eft, Shanghai Xinshida, Guangzhou CNC Such enterprises have become the backbone of the development and production of industrial robots in China, gradually replacing foreign imports.
The robot system is mainly composed of three parts: the executive part, the detection part and the control system. In the robot system, the manipulator, wrist, finger and its action mechanism are the executive parts of the robot. The control components are the core content of the robot system.
The robotic arm is an important part of industrial robots. It is a complex system, a system with multiple inputs and multiple outputs, and there is strong nonlinearity and strong coupling. These characteristics and the interference existing outside the system make the mechanical arm Mathematical models must have some uncertainties. At present, there are several algorithms to solve the problem of trajectory tracking control of the nonlinear system of the manipulator. Among them, Iterative Learning Control (ILC) does not rely on accurate mathematical models, and can completely track the system within the effective time.
Iterative learning control (ILC) was first proposed by Uchiyama in 1978. In 1983, Arimoto [1] et al. made further research on the mechanical equipment model. Common ILC algorithms include P-type ILC algorithm, D-type ILC algorithm, PD-type ILC algorithm, PID-type ILC algorithm, open-closed-loop ILC algorithm, etc. Learning Control-Iterative Learning Control (ILC), unlike other control methods, which start with linear controlled objects, ILC takes the nonlinear system as the research object in the first place and achieves the control task of output tracking in a finite interval [0, T]. The whole tracking is that the output of the system is consistent from the beginning to the end, whether transient or steady, which is consistent with the target track. Therefore, the starting point of iterative learning control is higher than that of other control methods. It can get the control input which can generate the desired output trajectory by repeatedly applying the information obtained from previous experiments, so as to improve the quality of control. Iterative learning control (ILC) searches for appropriate parameters of learning law by repetitive operation, so that the output of the controlled object can complete zero error trajectories tracking along the desired trajectory in limited time.
Iterative learning control (ILC) does not depend on precise mathematical model and can track the system completely in effective time. In addition, compared with the traditional control algorithm, ILC has less computation, simple controller structure and is easy to be applied in practical systems. In 2008 [2–4], Li Xingyi and others proposed an improved PD iterative learning control algorithm for time invariant systems for the iterative learning control problem of time invariant linear systems. The improved algorithm replaced the old control components by the newly calculated control components, and the actual output of the system approximated the ideal output of the system with a faster convergence speed. However, it does not consider whether the system still converges to zero in the presence of interference.
In 2018 [5–8], Zhang Kejun, et al. For a class of fractional order linear time-delay systems with external bounded noise disturbance, using the generalized Young inequality of convolution, we discussed the robustness of the PD type fractional iterative learning control algorithm (FOILC) in the sense of Lebesgue-p (Lp) norm and obtained the conditions for its robust convergence. In 2014 [9–15], Nankai University Lu Qing et al. Aimed at a class of high-order nonlinear systems with uncertain parameters and unknown disturbances, a new sliding mode robust iterative learning control algorithm was proposed by using the quasi Lyapunov method combined with the advantages of partial limiter learning law and sliding mode control. The algorithm has better robustness to unknown disturbances. Both theoretical proof and simulation results show the effectiveness of the algorithm.
References [16, 17] discuss the learning performance of the system when there is interference. For the system with disturbance, the robustness is analyzed and the robust convergence condition is obtained. In reference [18], a robust sliding mode ILC algorithm is proposed to separate the disturbances of uncertainty into time axis disturbances and iterative axis disturbances. Although it achieves the best anti-interference ability, its convergence speed is still slow and the number of iterations is high. In view of the problem of system convergence speed, the References [20, 19] prove the accelerated iterative learning control under the Lebesgue-p norm through the adjustable interval, and gives the convergence proof through the Young inequality, and the learning gain is corrected in real time in the designed correction interval, and the system convergence speed is accelerated by the way of no correction outside the interval. In [92], the exponential variable gain is used to accelerate the learning law, and an algorithm that reduces the correction interval by increasing the number of iterations is designed to speed up the convergence. In [21], Zhang et al. discuss iterative learning control for linear singular distributed parameter system. The above literature only discusses the convergence of the algorithm, but in practice, the control system is also subject to external interference (noise, industrial interference, etc.), so it is not comprehensive to discuss the convergence of the system without interference. Convergence should be discussed in the context of introducing interference into the system.
Problem descriptions
In this section, we take the path planning of the manipulator as the background, and use the obtained path to curve fitting for trajectory tracking control. The obtained path is applied to a two-degree-of-freedom manipulator system through an iterative learning controller to verify the trajectory tracking. In this section, the acceleration control method of 2-DOF manipulator with external disturbance is studied based on PD ILC algorithm. When the actual trajectory and expected trajectory converge to zero, the system receives external disturbance, and the control system quickly restrains the external disturbance and converges again, which proves that the system has better convergence. Under λ norm, we use Bellman-Gronwall lemma to proof the algorithm, and give a detailed mathematical proof. Finally, an example is given to show that the PD-type acceleration under disturbance is better than other methods, which verifies the validity and correctness of the algorithm.
Consider the following a class of nonlinear system
Generally speaking, the design of Iterative Learning Controller is based on PID control. The main content is to set the parameters of the controller and adjust the parameters in real time. In the process of adjusting, the control system reaches a satisfactory level. The design principle of this control process mainly involves the following aspects: integral action, differential action and the selection of stability index. In this section, we mainly use the PD term, so we don’t need to consider the integral term when designing the iterative learning controller.
According to the kinematics model of the manipulator and the actual operation characteristics, the system (1) can satisfy the following assumptions in finite time:
The system output error is
We use the PD-type learning control law
By Equation (4), we have
According to Equation (1), we get
Introducing (1) into (7), yields
Taking the norm of Equation (9), then we use the Bellman-Gronwall formula, yields.
Taking the norm of Equation (6), yields.
Introducing (13) to (14), yields
When the N is enough large, taking the λ-norm of Equation (15), yields
According to Equation (15), we get
When we choose the iterative learning gain Γ is enough small and M = ∥ (1 + CBΓ) -1 ∥ < 1, when k→ ∞, we get
From the above analysis, we know that the control law can guarantee the system convergence with λ-norm. As the number of iterations increases, when λ is enough large, the output of the system coincides with the desired trajectory. Convergence is the basic requirement of learning control. Only when the learning process converges to the true value can be obtained the optimal control. Through the error between the expected trajectory and the actual trajectory, the system converges gradually to zero with the increase of iteration times or within a certain error range, then the convergence of the system is the best.
In order to verify the effectiveness of the control algorithm in this paper, we use two examples to illustrate.
As shown in Fig. 1, the mechanical arm is simulated by the following dynamic model, and the equation is as follows:
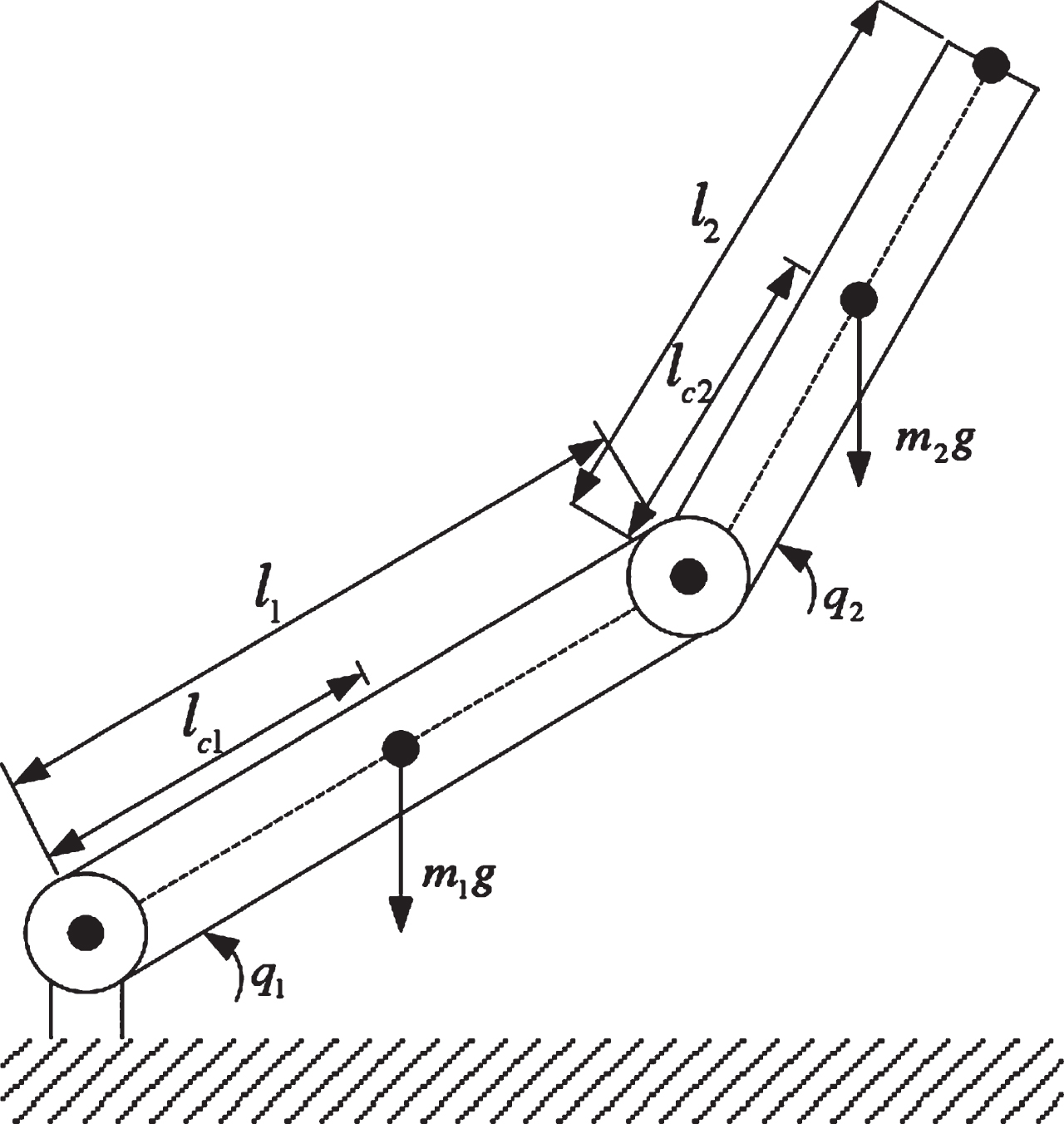
2-DOF manipulator system.
The parameters in formula (25) are
Let be I1 = I2 = 0.1, l1 = l2 = 0.5, m1 = m2 = 0.1.
Setting
The system output is
From the dynamics model of the manipulator, we can get the matrix A, B and C
We choose the learning gain matrix
The simulation results are shown in Figs. 2–5. Among them, red line represents the given trajectory and blue line represents the actual trajectory. Figure 2 is the first control tracking figure of the iterative learning control PD manipulator. The three curves are quite different. (3) is the ILC tracking process chart of the manipulator controlled by PD. Figures 4 and 5 show the position of the manipulator at the 40th iteration under different algorithms.
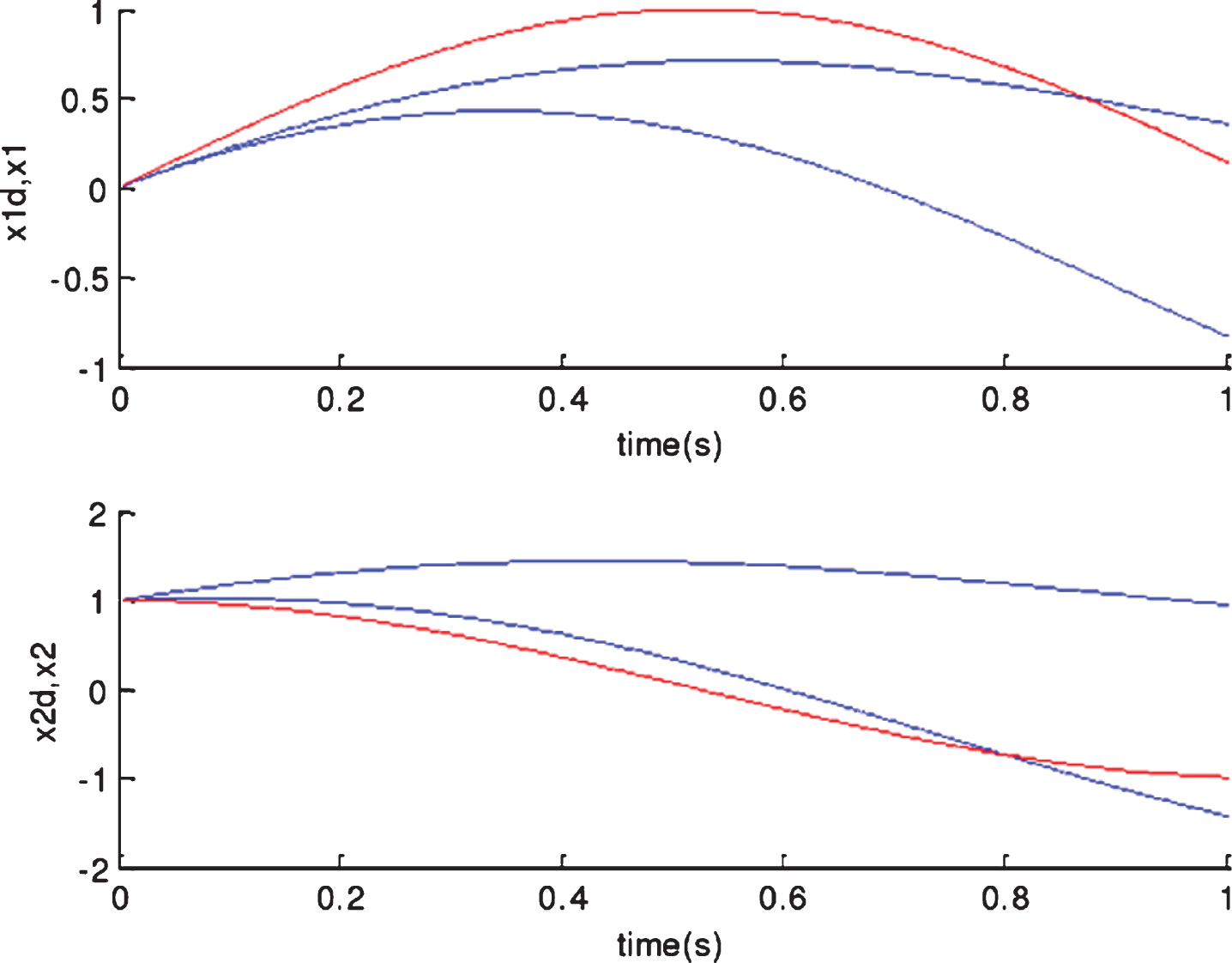
The first control tracking cure for PD manipulator with iterative learning control.
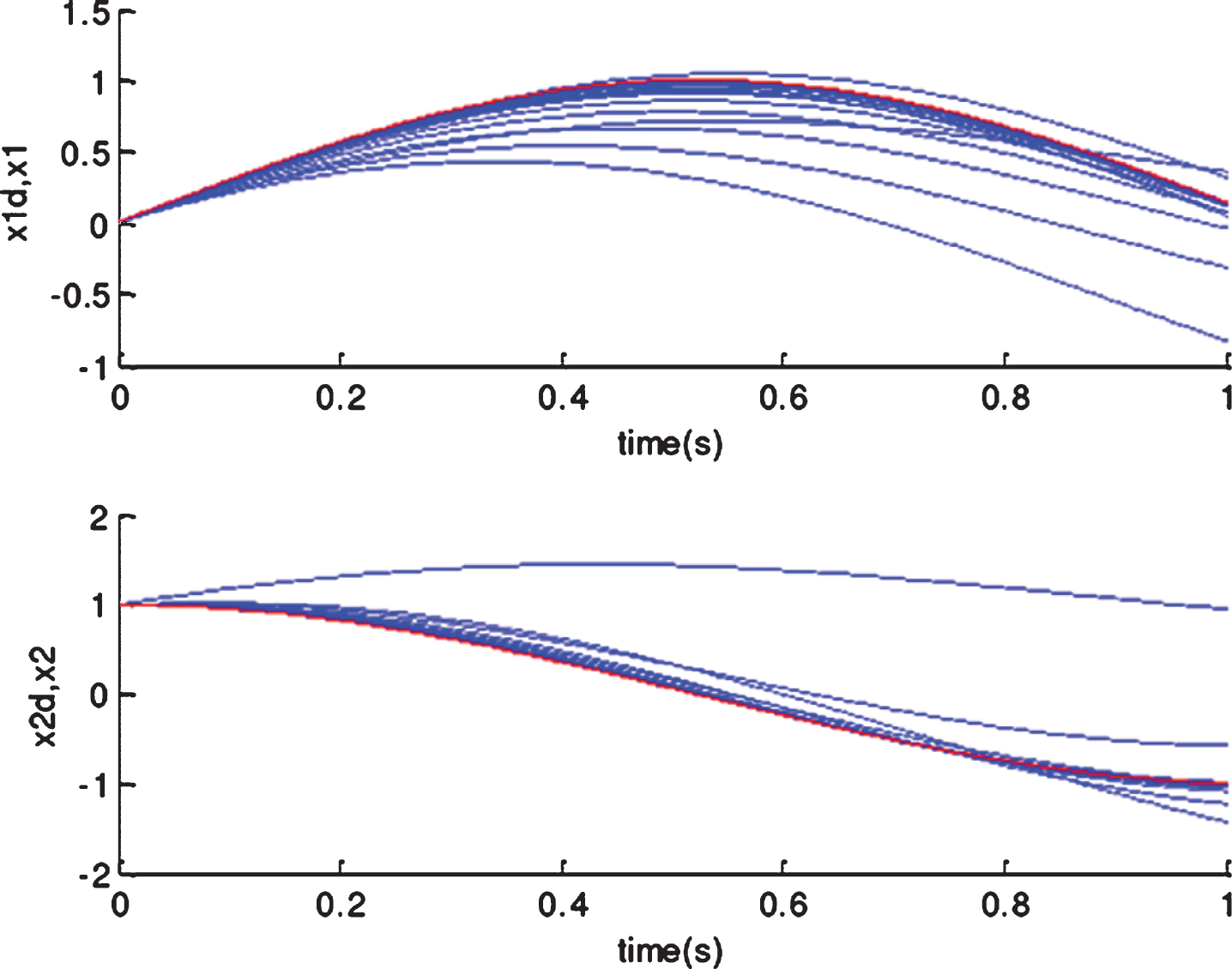
ILC tracking process cure of manipulator under PD learning law control.
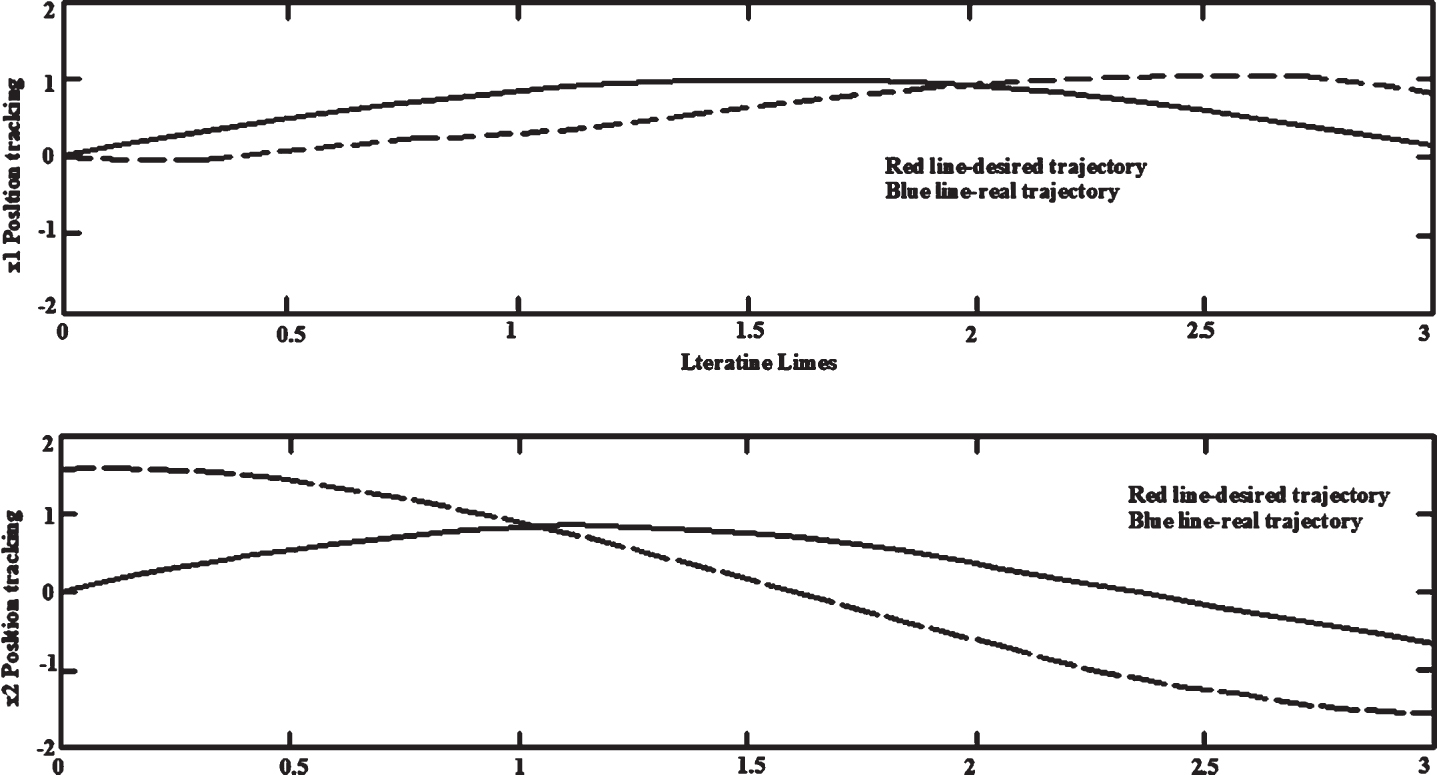
The position of the 40th manipulator controlled by PD learning law.
Position of the 40th manipulator under PD ILC.
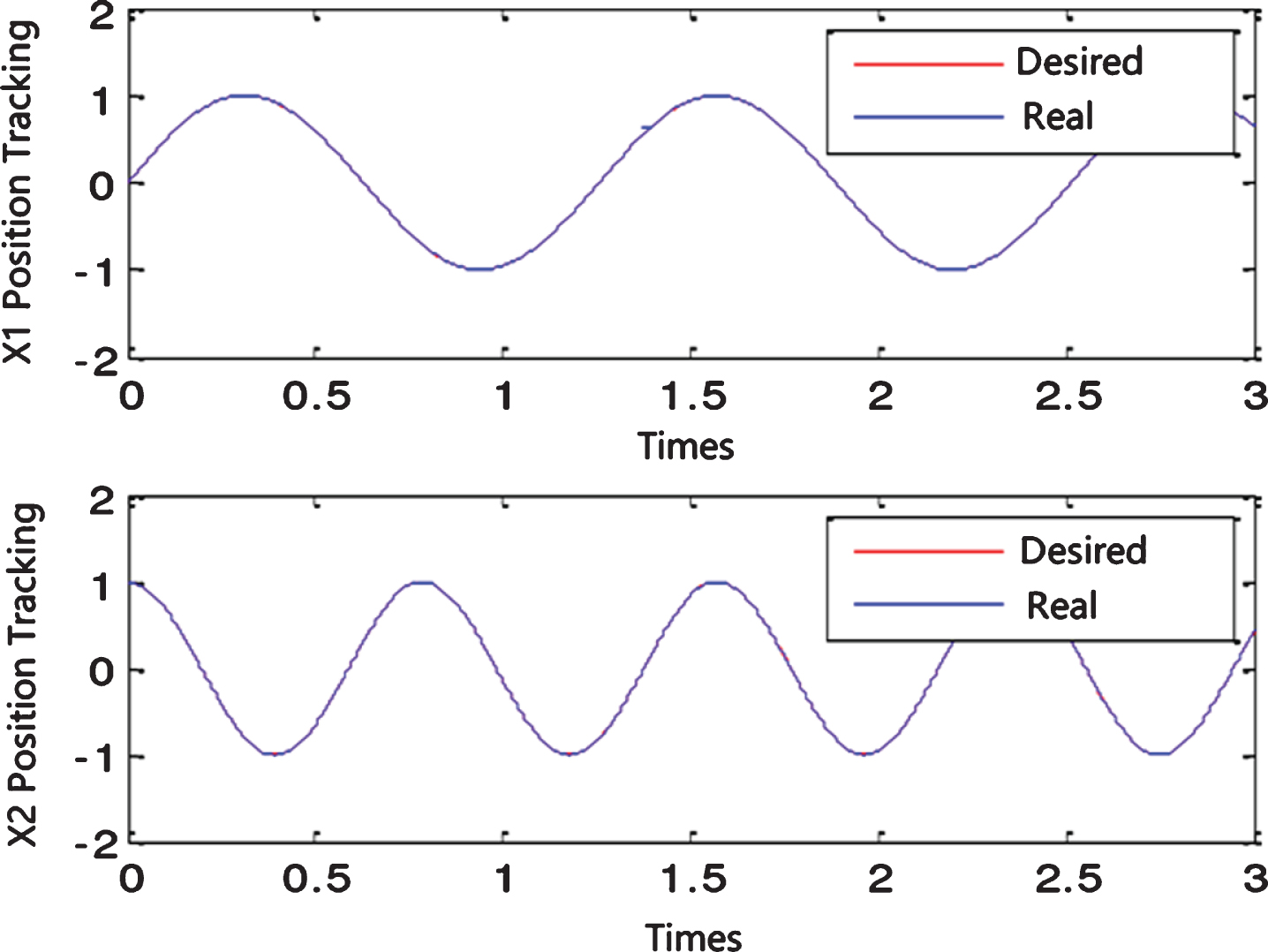
Figure 4 shows that the actual trajectory of a two-degree-of-freedom manipulator does not coincide with the desired trajectory under the traditional PD control, while the two trajectories under the iterative learning control in Fig. 5 have been fully tracked.
Figure 5 is the position diagram of the two-degree-of-freedom manipulator, and Fig. 4 is the PD control result of the two-degree-of-freedom manipulator. From the two sets of simulation curves, it can be seen that with the increase of the number of times, the actual trajectory of the PD-type ILC gradually coincides with the desired trajectory, while the output trajectory of the PD-type control manipulator still does not coincide. Therefore, the effect of PD-type ILC is good, and the output error of PD-type ILC will converge to a certain value.
Figure 6 is the convergence error curve of PD type ILC. The output error of the manipulator can be reduced gradually by choosing the PD control law. Analysis of the simulation curve shows that. With the increase of iteration times, the output error can converge to a certain range. The system needs to iterate to the sixth time to track the desired trajectory. The interference is added to the 20th time, and the output trajectory of the system is completely tracked in the 24th iteration. This design method has the advantage of anti-interference and is more conducive to engineering application.
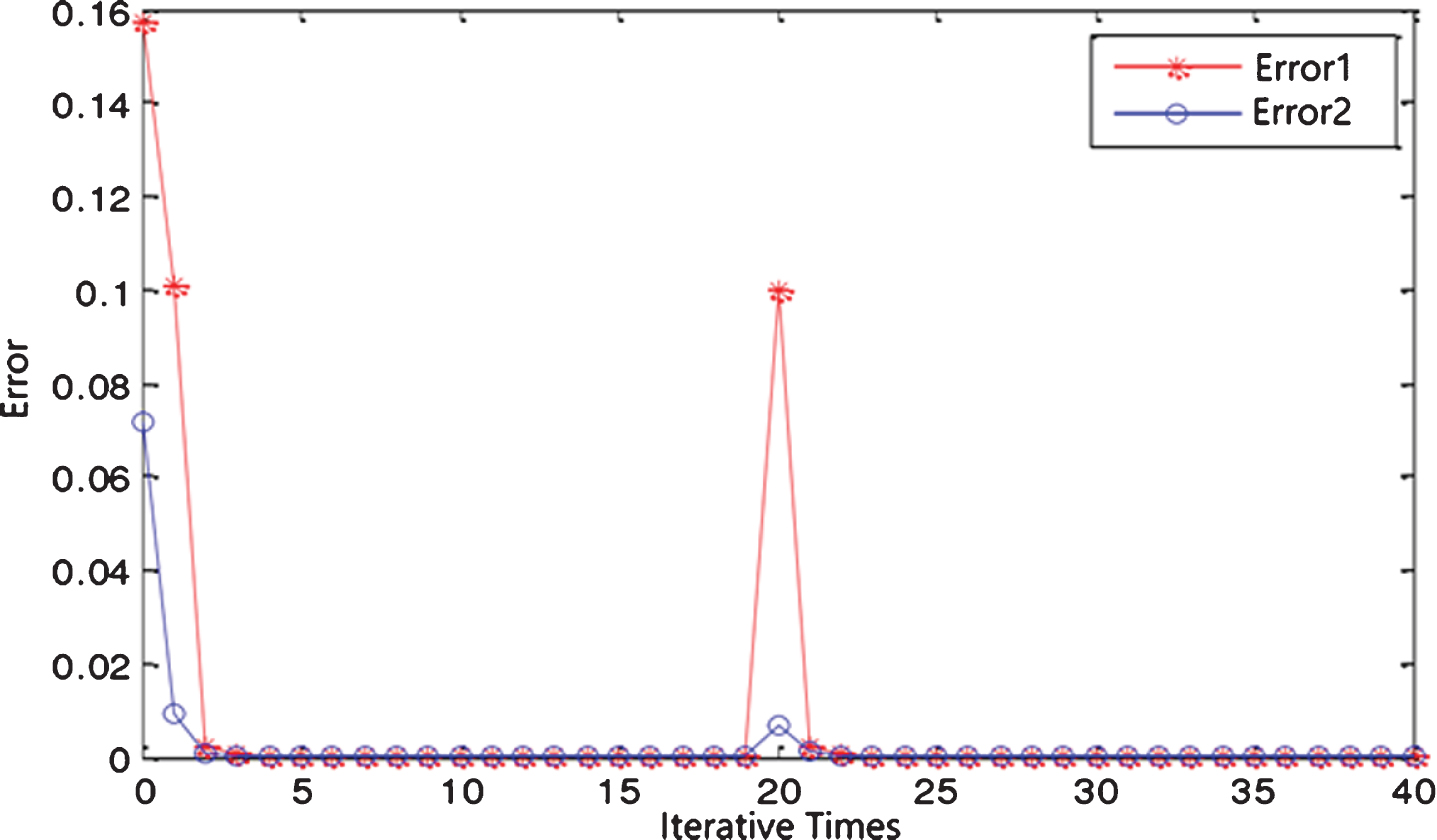
ILC error with PD-type.
In order to compare and analyze, the accelerated experiment uses PD-type iterative learning and P-type iterative learning algorithm for numerical simulation. The tracking error of the iteration is shown in Fig. 7. The P-type control law needs the sixth iteration to track the desired trajectory, while the PD-type control law needs to track the desired trajectory after the fourth iteration. The results show that compared with P-type control law, PD-type control algorithm improves the learning speed.

Comparison of Accelerated Iteration Error Curves.
ILC algorithm itself is used for controlled system. With the number of iterations increases, the output error of the system decreases as the actual trajectory approaches the desired trajectory. By comparing Figs. 3, 6 and 7, it can be found that the error converges to zero when the two trajectories coincide. The improved algorithm has more engineering application significance.
Conclusions
Iterative learning algorithm is mainly discussed in this chapter. Compared with PD control and PD-type ILC, the disturbance is added to the designed controller because of the uncertainty of the manipulator. The results also prove that PD-type ILC has a good control effect. The convergence of ILC algorithm with disturbance is analyzed, and the effectiveness of the proposed controller is verified by simulation. When the system converges to zero for the first time, the disturbance error is increased, and the control system can converge to zero quickly again, which shows that the effect of the controller is the best. Finally, the simulation of a group of accelerated tests proves that PD-type ILC converges to zero less than P-type ILC.
Outlook
In the process of trajectory tracking control of industrial robots by iterative learning algorithm, we do not take into account such factors as non-repeatability. These factors exist in the actual system, but they are not taken into account in the experiment. Theoretical analysis can only get ideal data, and can not be further studied. If conditions permit, discrete adaptive iterative learning control model can be used to provide a better solution for industrial robot control and path planning, and the convergence and stability of the control technology can be analyzed.
Authors’ contributions
All authors contributed equally and significantly in writing this article. All authors read and approved the final manuscript. Yinjun Zhang and Mengji Chen are corresponding author.
Conflict of interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
The work was supported by the Hechi University Foundation (XJ2016ZD004), Hechi university Youth teacher Foundation(XJ2017QN08), the Projection of Environment Master Foundation (2017HJA001, 2017HJB001), The important project of the New Century Teaching Reform Project in Guangxi(2010JGZ033), Guangxi Youth teacher Foundation(2018KY0495).