
Abstract
Labor force is gradually becoming insufficient owing to the aging population. The quality and safety of workforces are increasingly important, and thus, a set of intelligent wearable devices that assist the transport of loads by laborers, provide auxiliary standing support, and prevent falls were designed in this study. By applying an auxiliary force to the knee joint externally, an intelligent wearable device saves labor and reduces the burden on this joint, thereby protecting it. This study utilizes a Bayesian backpropagation algorithm for intelligent control. The intelligent wearable device provides the most suitable velocity and torsion depending on the initial driving torsion of the user by a Bayesian backpropagation algorithm based on the current angle position, velocity, and torsion load of the device motor, thereby achieving an intelligent control effect of auxiliary standing support. A triaxial accelerometer is utilized to sense a fall and prevent it by a so-called fuzzy-Bayesian backpropagation control (FBC). Eventually, this study successfully designed and manufactured an intelligent wearable device by the FBC method. For a single motor control, two knee auxiliary devices can generate a torsion of 18.6 Nm. For dual motor control, two knee auxiliary devices can generate a torsion of 43.2 Nm. Thus, the laborers can not only perform their work efficiently and safely but also reduce costs and raise the working market competitiveness.
Keywords
Introduction
In recent years, the world has begun to enter in the society of aging laborers. The problem of an aging labor force is not solved by raising salaries. The biggest problem is that the workforce becomes tired and vulnerable, resulting in fewer people willing to invest. If a wearable device providing an auxiliary force can be used to help laborers reduce their fatigue and injuries, more people would be willing to work in farming or carrying goods, thus achieving more effective work.
According to the literature, the development of wearable auxiliaries is increasing, and they are not limited to enhancing the power of users, they also seek specific purposes of design and development. The Berkeley lower extremity exoskeleton (BLEEX) [1, 2], developed by Prof. Kazerooni of U.C. Berkeley, is an early representative of exoskeleton robots. The main purpose of the skeletal robot is to reduce the burden on the user when carrying heavy loads and to maintain the sensitivity. A dynamic model established in advance can help estimate the intentions of a user; therefore, the user can be assisted by the sensitivity of the adjustment and the current state of the mechanism, thereby increasing the load capacity. However, despite its higher sensitivity, BLEEX has lower stability when it hits an obstacle or is hit by an external force. This situation requires the user to dodge or eliminate the obstacle or force. Aguirre-Ollinger et al. [3, 4] utilized a torque sensor with low-pass and Kalman filters. This control method is used to offset the inertia generated by the robot mechanism of the exoskeleton during the movement and to make the assisted walking more stable. In addition to using active components (such as motor encoders) as the main sensor, Tomizuka et al. [5] utilized a spring, a passive component, as the main torque sensor, which cooperates with the disturbance observer and proportional-differential controller to eliminate the noise and stabilize the system. Dollar et al. [6] designed an energetically autonomous powered knee exoskeleton to facilitate running. The device consists of a knee brace in which a motorized mechanism actively places and removes a spring in parallel with the knee joint. Therefore, most of the wearable techniques are mainly for assisted walking. Although there are military-use aids for weight-bearing reduction, these wearable devices are bulky and inconvenient. Hence, this study aims at designing a small, lightweight, and intelligent wearable device to reduce the burden on laborers and prevent falls when they are performing in their work movements from squatting to standing positions.
Intelligent wearable device
Single motor structure
To design a wearable device for workplace transport and as an auxiliary standing support, this study utilizes a single motor to generate an auxiliary force on the knee joint to save labor and reduce the burden on the knee joint. Figure 1 depicts the wearable device with single motor structure used in this study.

Wearable device with single motor structure.
The wearable device with single motor structure comprises a servo motor, motor-driver and signal processor, battery, and hook and loop fasteners. The servo motor, motor-driver, signal processor, and battery are mounted on the leg part of the wearable device. Therefore, the servo motor drives the thigh part of the wearable device to provide auxiliary standing support. Moreover, the real-time torsion, angle position θ in the range between 0 to 180°, and velocity are measured by the load cell, angle position, and velocity sensors in the servo motor. Additionally, the wearable device can be worn tightly, comfortably, and conveniently by means of the hook and loop fasteners.
To provide a larger auxiliary force on the knee joint and prevent labor falls, this study utilizes dual motors and a triaxial accelerometer for the wearable device of dual motor structure. Figure 2 depicts a wearable device of the dual motor structure in this study. The wearable device of the dual motor structure comprises two servo motors, motor-driver and signal processor, battery, triaxial accelerometer, and hook and loop fasteners. The two servo motors, motor driver, battery, and triaxial accelerometer are mounted on the leg part of the wearable device. The two servo motors drive spur gears to transfer auxiliary force to the gear of the thigh part of the wearable device to provide auxiliary standing support. Moreover, the three gears are of the same sizes. The two servo motors drive the spur gears clockwise in the same direction to transmit counter-clockwise auxiliary force to the gear on the thigh part of the wearable device, from squatting to standing. Additionally, the triaxial accelerometer is utilized to sense a fall and prevent it by means of the dual motor control.
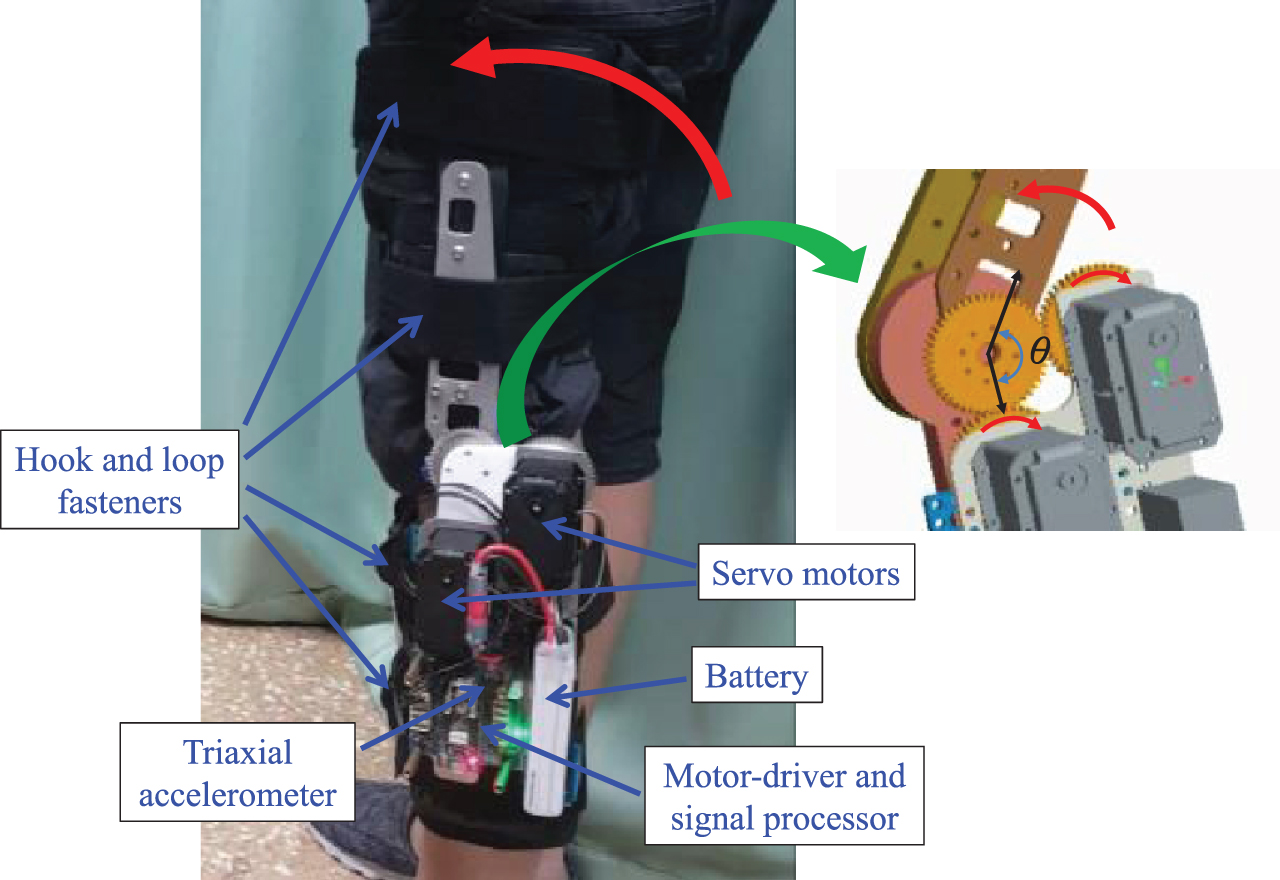
Wearable device with dual motor structure.
Eventually, this study utilizes covers to protect the servo motors, motor driver, battery, and triaxial accelerometer. Additionally, a waist band (11) and two belts (12) are utilized to hold the left and right wearable devices of dual motor structure (10) tightly, comfortably, and conveniently, as shown in Fig. 3.

Photograph of intelligent wearable device.
Bayesian backpropagation algorithm
To provide the most suitable velocity and torsion for workplace transport and the auxiliary standing function, this study utilizes a neural network based on the Bayesian backpropagation algorithm for the controller design of the intelligent wearable device. The concept of a neural network is to imitate a biological neural network and realize different actions through different stimuli. The application of neural networks is the same as the learning of human brains. Through the training of samples or data, the ability to learn, recall, and generalize deductions can be expressed in the usual approximation function, optimization, and data classification. The Bayesian network is a graphical statistical reasoning model [7] that uses a set of random variables and the influence relationship between variables to analyze the probability of uncertain events in decision problems, and it can be based on new information or evidence at any time. Through the deduction of layers, the after-effect rate of uncertain events is pushed.
In the backpropagation algorithm [8], the aim is to minimize the function F = E
δ
, where
The objective function of the regularization is
From the Bayesian framework, the weights of the network are assumed to be random variables. According to Bayes’ rule, the posterior density of the weights based on the training set data X is
Assuming that the noise in the training set data and the prior distribution of weights are Gaussian, the probability of data occurring given the network weights and the evidence of the model given the hyperparameters are obtained as
Assuming the prior density P (α, β) to be uniform, the maximization of the posterior P (α, β|X) is equivalent to maximization of P (X|α, β). From Eqs. (4) and (5), Eq. (3) is rewritten as
As the objective function has the shape of a quadratic in a small area surrounding the minimum point of the posterior density ω
MP
, where the gradient is zero, σ
M
(α, β) is estimated by Taylor series expansion. Solving σ
M
(α, β) for the normalizing constant gives

One-cycle measurement experimental results of single-leg intelligent wearable device based on (a) 1±0.2 s, (b) 1.5±0.2 s, and (c) 2±0.2 s from the squatting to standing position, respectively.
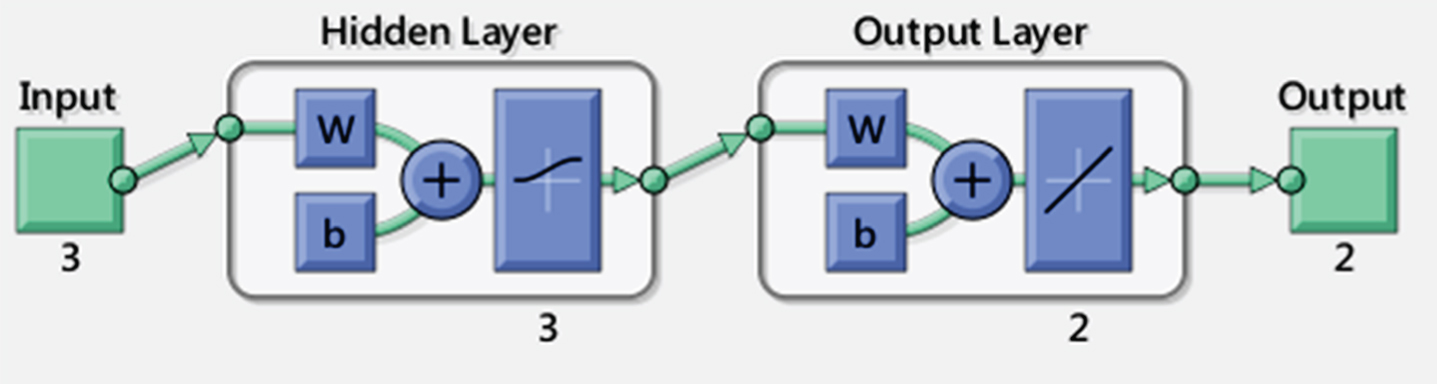
Two-layer network based on 3 neurons in first layer and 2 neurons in second layer for three inputs of the current angle position, velocity, and torsion load of the user, and two outputs of velocity and torsion of the dual motor by using the Bayesian backpropagation algorithm.
To prevent falling during workplace displacements, this study utilizes the triaxial accelerometer to sense a fall and prevent it by fuzzy control. Figure 6 depicts an intelligent wearable device that senses a forward or backward fall by a triaxial accelerometer. Because the z axis of the triaxial accelerometer is not sensitive to the forward or backward fall, this study utilizes the x and y axes of the triaxial accelerometer to sense a fall. As the intelligent wearable device based on fuzzy control senses a forward fall, the dual motor drives the thigh part of the wearable device clockwise. Otherwise, the dual motor drives the thigh part of the wearable device counterclockwise as it senses a backward fall. This study utilizes a fuzzy control [12, 13] to prevent falls during workplace displacements by employing the Mamdani’s minimum fuzzy implication rule (MMFIR) method. The input and output membership functions are designed to be uniformly distributed in the trigonometric features within a signal between –10 a.u. to 10 a.u., as shown in Fig. 7. Moreover, this study uses the following nine fuzzy rules:
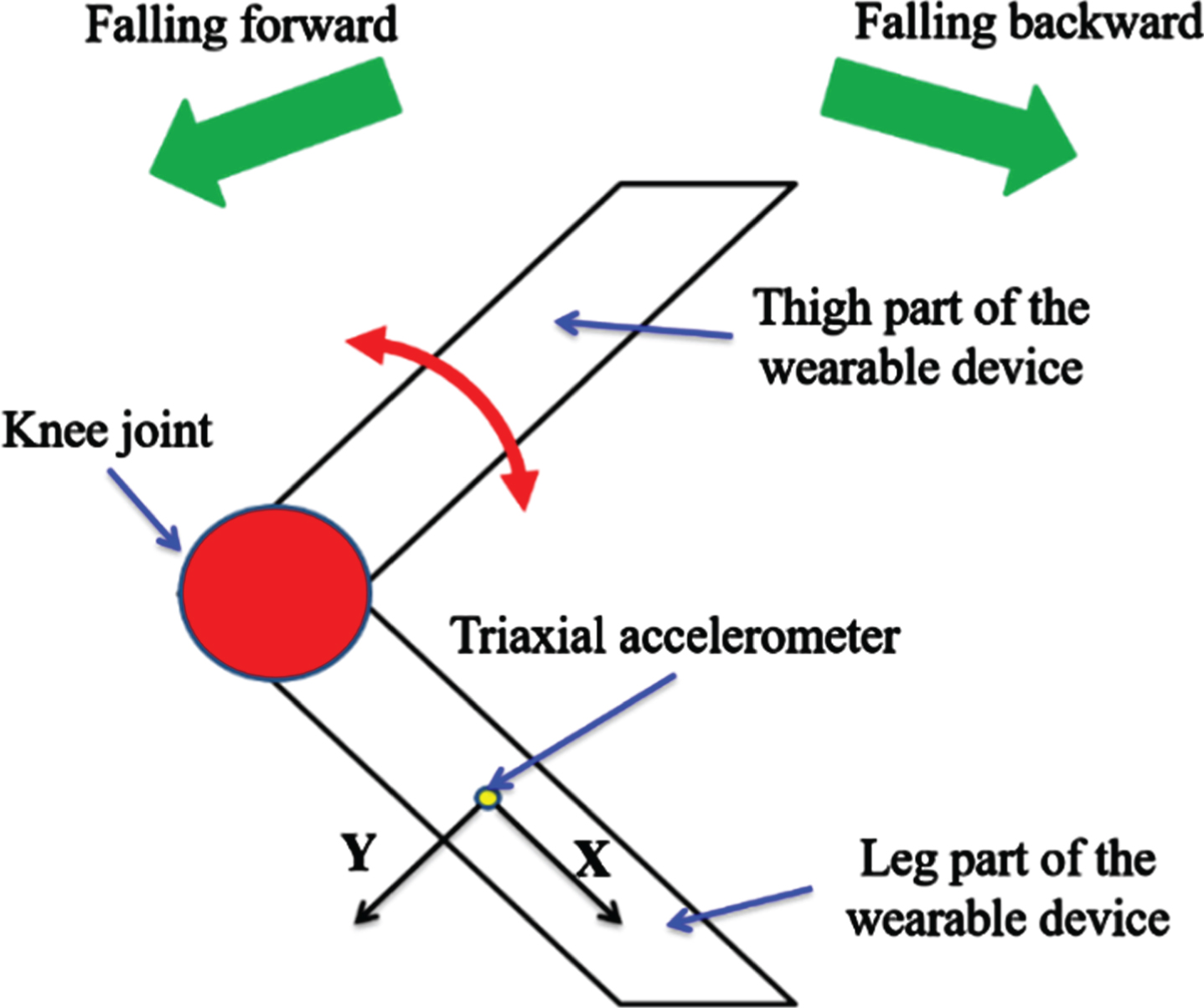
Schematic of intelligent wearable device with triaxial accelerometer.

Design of membership functions of (a) x-axis, (b) y-axis inputs, and (c) output based on the trigonometric features within a signal between –10 a.u. to 10 a.u, and (d) a defuzzification result based on a forward fall by using COA method.
IF x-axis input is NS and y-axis input is NS, then output is ZE. IF x-axis input is NS and y-axis input is ZE, then output is ZE. IF x-axis input is NS and y-axis input is PS, then output is ZE. IF x-axis input is ZE and y-axis input is NS, then output is ZE. IF x-axis input is ZE and y-axis input is ZE, then output is ZE. IF x-axis input is ZE and y-axis input is PS, then output is ZE. IF x-axis input is PS and y-axis input is NS, then output is PS. IF x-axis input is PS and y-axis input is ZE, then output is ZE. IF x-axis input is PS and y-axis input is PS, then output is NS.
Eventually, this study utilizes the center of area (COA) method [14, 15] for the defuzzification. The COA method is expressed as
To help in workplace transport, provide auxiliary standing support, and prevent falls of laborers, this study has designed an intelligent wearable device of dual motor structure based on the so-called fuzzy-Bayesian backpropagation control (FBC). When the user of the intelligent wearable device moves from a squatting to standing position, the current absolute position, velocity, and torque load of the motor are sensed through the built-in sensor, and the acceleration change values of the x and y axes are sensed through the triaxial accelerometer. If the fuzzy controller based on the triaxial accelerometer judge this to be a fall, the motor will rotate clockwise or counterclockwise to prevent it. Conversely, when standing normally, the current absolute position, velocity, and torque load are taken as inputs, and the motor drives the intelligent wearable device with suitable velocity and torsion to achieve a safe auxiliary standing support by using the Bayesian backpropagation control. Figure 8 represents a control block diagram of the intelligent wearable device based on the FBC method.
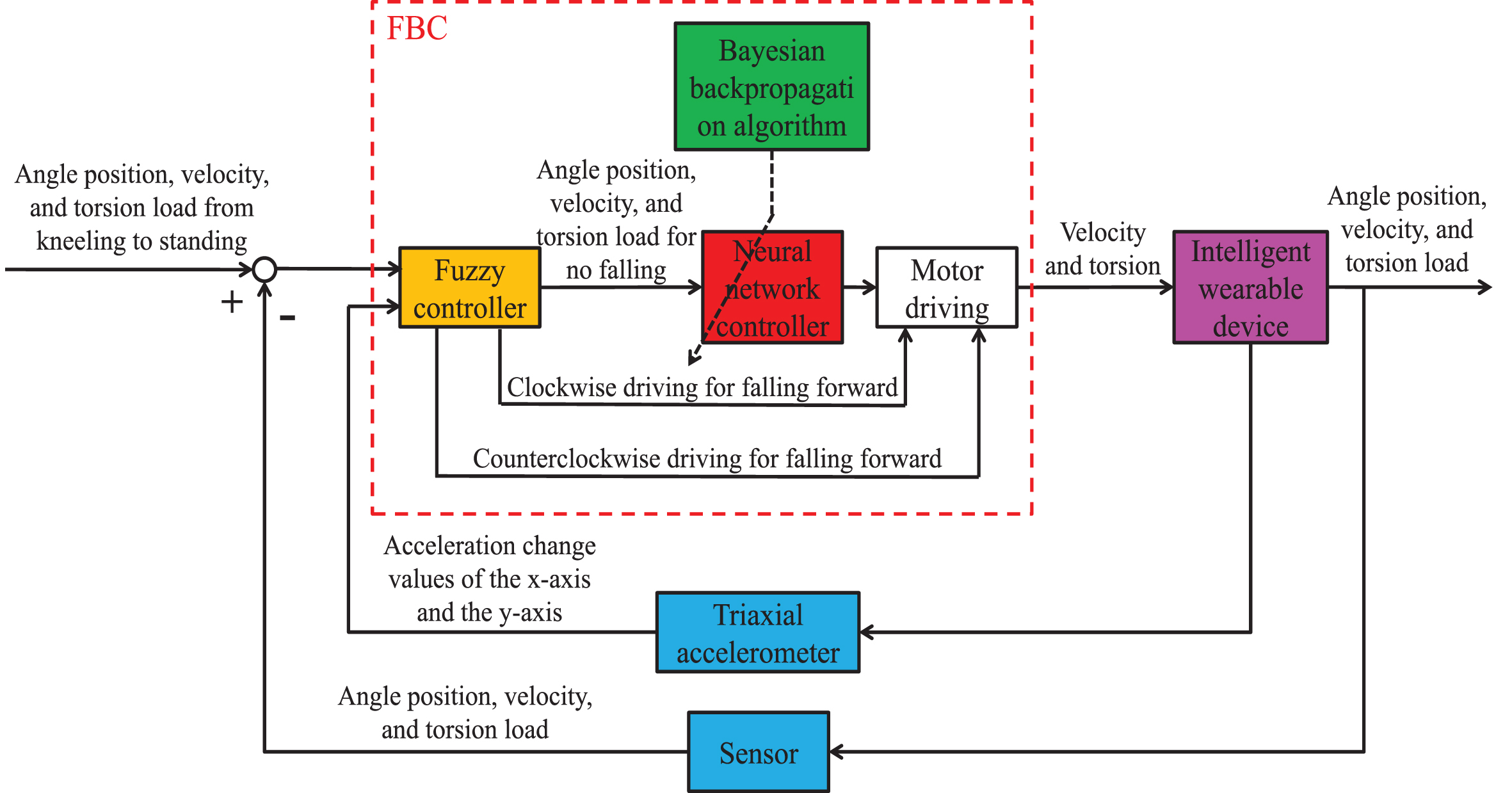
Control block diagram of intelligent wearable device based on FBC method.
To simulate the FBC of the intelligent wearable device of dual motor structure, this study utilizes the MATLAB Simulink software. According to the two-layer network based on the Bayesian backpropagation algorithm in Fig. 5, the block diagram based on the FBC of a single-leg intelligent wearable device of dual motor structure is shown in Fig. 9. This study assumes that when the fuzzy controller output signal is less than –3 a.u., this is a forward fall; then, two signals of 1664 a.u. and 293 a.u. are given for velocity and torsion control of the motors, respectively, to make them rotate clockwise. When the fuzzy controller output signal is greater than 3 a.u., it is determined that this is a backward fall, and two signals of 640 a.u. and 293 a.u. are given for velocity and torsion control of the motors, respectively, to make them rotate counterclockwise. When the fuzzy controller output signal is between –3 a.u. and 3 a.u., this is judged to be a condition of no fall, so that the neural network based on Bayesian backpropagation algorithm is functioning normally.

Block diagram based on the FBC of intelligent wearable device of dual motor structure using MATLAB Simulink.
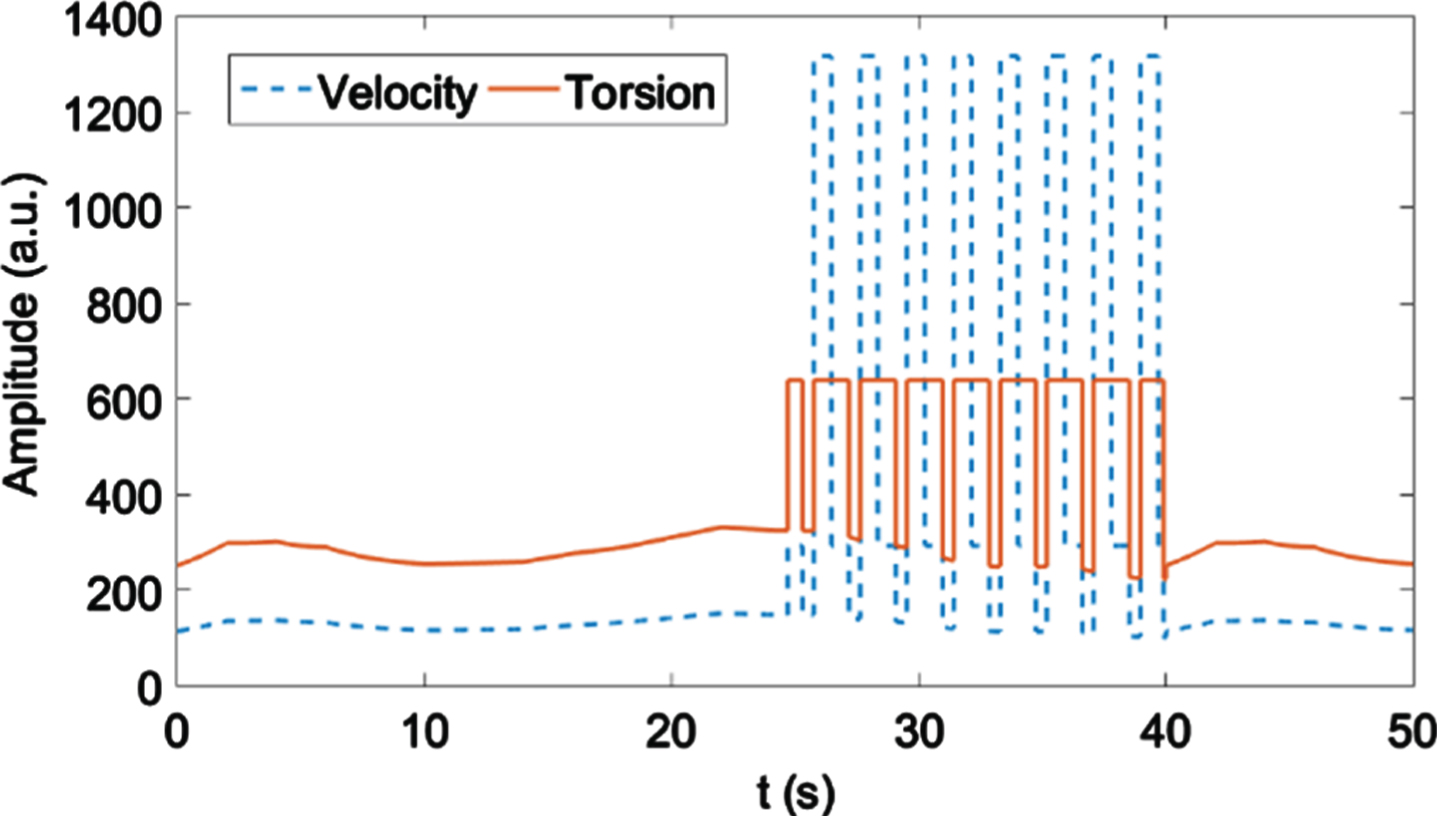
To simulate the falling condition based on FBC, this study assumes that the situation of the x and y axes of the triaxial accelerometer with signal ranging from –10 a.u. to 10 a.u. is simulated by two different step signals. The signal of the x axis has a period of 40 s and rises by 1 a.u. every 2 s, rising from –10 a.u. to 10 a.u. The signal of the y axis has a period of 2 s, rising by 1 a.u. every 0.05 s, and rising from –10 a.u. to 10 a.u. Figure 10 depicts the simulation signals of the triaxial accelerometer. Additionally, this study utilizes one of 400 one-cycle experimental results for the input signals of the two-layer network based on the Bayesian backpropagation algorithm, as shown in Fig. 11. The output signals of are obtained by the fuzzy controller based on the x- and y-axis signals of the triaxial accelerometer, as shown in Fig. 12. According to Fig. 10, the x-axis signal is less than 0 during the time interval t = 0 to t = 22 s, which means that this is a normal standing condition; thus, the fuzzy output is 0 in Fig. 12. That is, when the acceleration direction of the x axis is upward, the fuzzy will not have any action. In Fig. 12, when the output signals of the fuzzy controller are less than –3 a.u. during the time interval t = 25 to t = 40 s, this is judged to be a forward fall situation, and the motors control the velocity and torsion of the intelligent wearable device by output signals of 1664 a.u. and 293 a.u., respectively, so that the motors rotate clockwise to prevent the fall. Figure 13 represents the driving signals of velocity and torsion of the intelligent wearable device for a forward fall during the time interval t = 25 to t = 40 s. Conversely, when the output signals of the fuzzy controller are greater than 3 a.u. during the time interval t = 25 to t = 40 s, this is judged to be a backward fall, and the motors control the velocity and torsion of the intelligent wearable device by output signals of 640 a.u. and 293 a.u., respectively, so that the motors rotate counterclockwise to prevent the fall. Figure 14 represents the driving signals of velocity and torsion of the intelligent wearable device for a backward fall during the time interval t = 25 to t = 40 s.

Simulation signals of x and y axes of triaxial accelerometer.

Input signals of two-layer network based on Bayesian backpropagation algorithm.
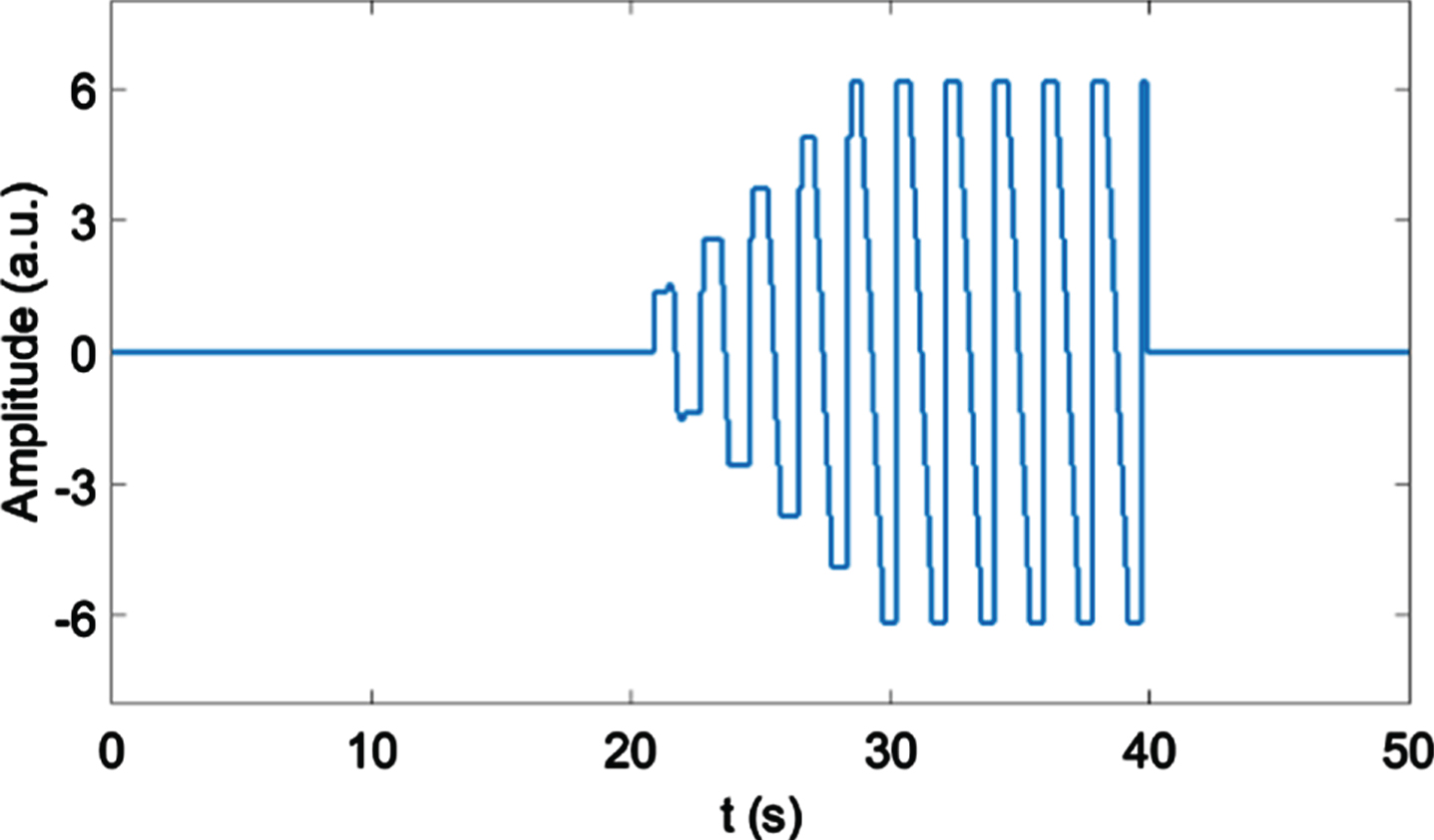
Output signals of fuzzy control by the fuzzy controller based on the x- and y-axis signals of the triaxial accelerometer.
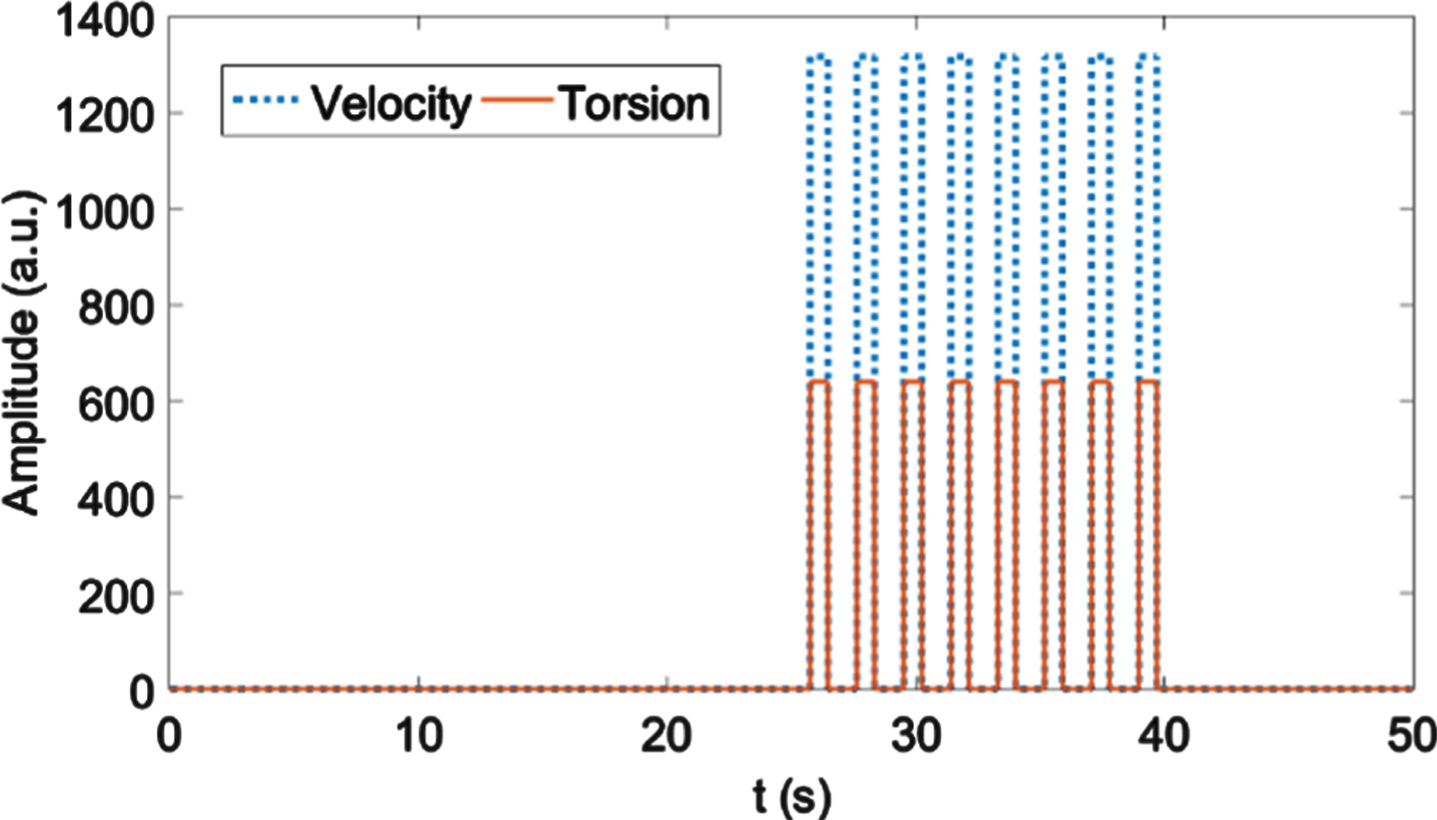
Driving signals of velocity and torsion of the intelligent wearable device for a forward fall during the time interval t = 25 to t = 40 s.
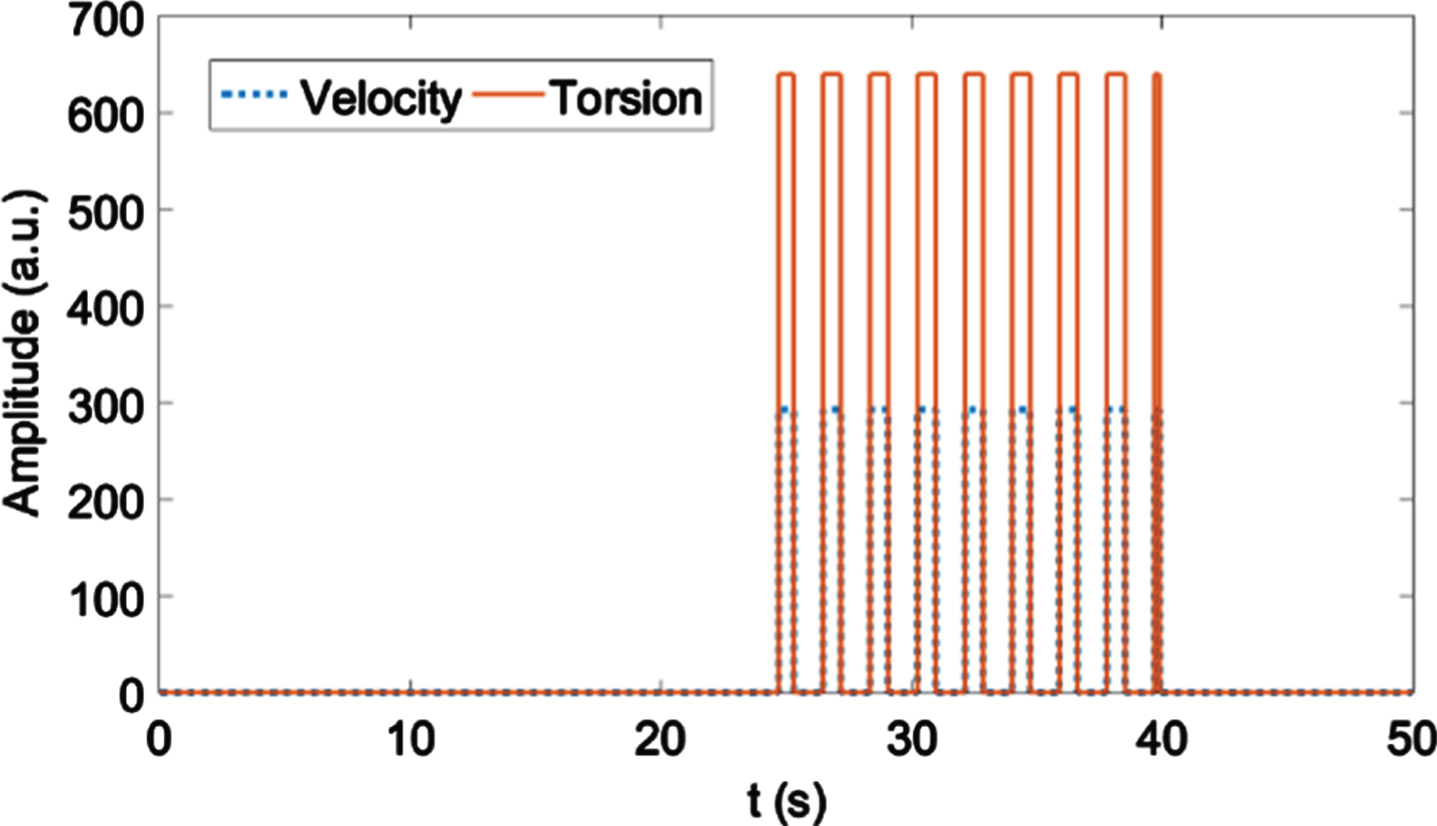
Driving signals of velocity and torsion of the intelligent wearable device for a backward fall during the time interval t = 25 to t = 40 s.
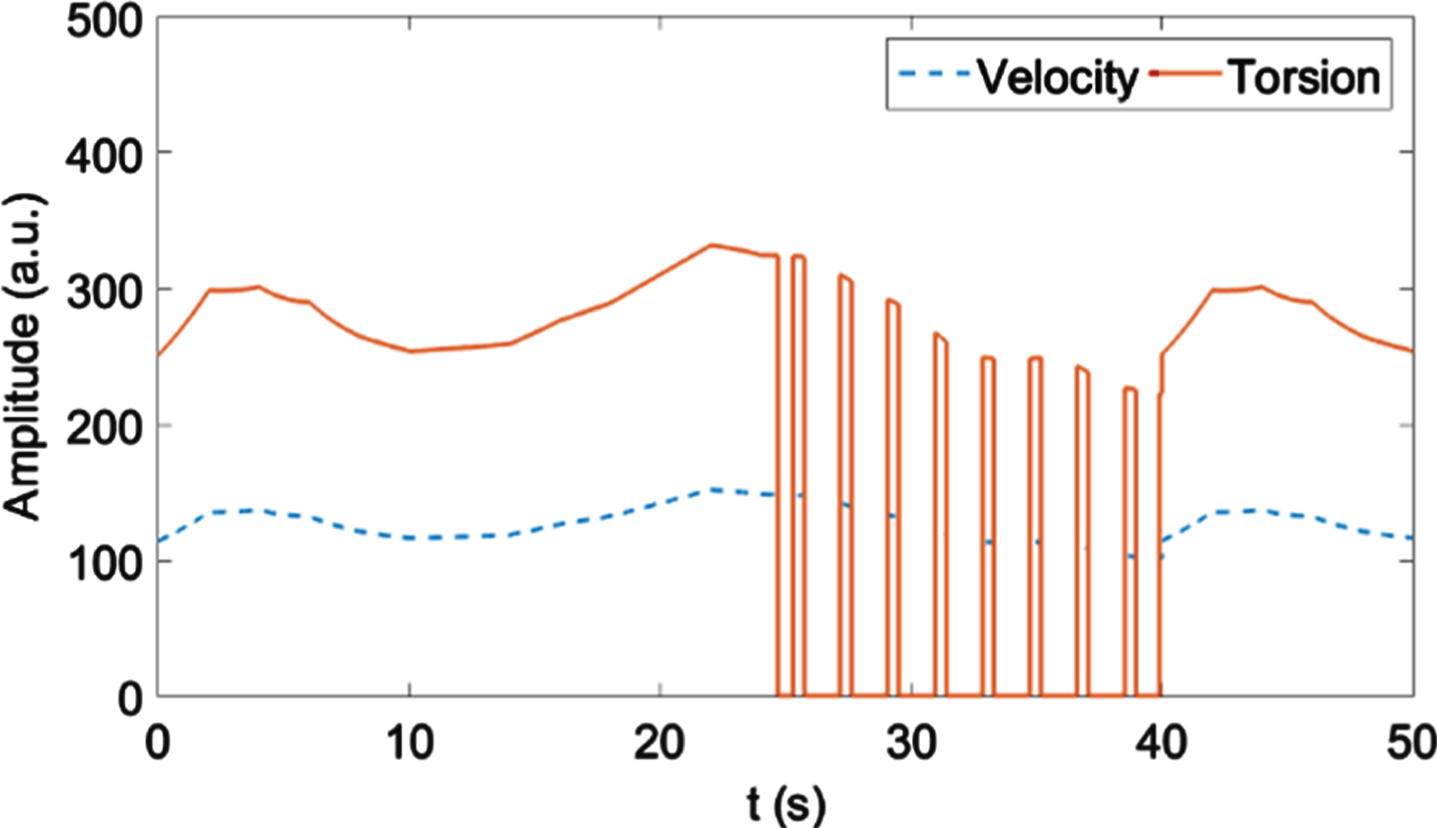
From Fig. 10, when the output signals of the fuzzy controller are between –3 and 3 a.u., this is judged to be a normal standing situation; thus, the neural network based on a Bayesian backpropagation algorithm is executed. When the output signals of the neural network based on a Bayesian backpropagation algorithm are 0 during the time interval t = 25 s to t = 40 s in Fig. 15, this represents a fall state; thus, the neural network based on a Bayesian backpropagation algorithm stops working and the fuzzy controller is executed. Eventually, Fig. 16 depicts the driving signals of velocity and torsion of the intelligent wearable device by using the FBC. In Fig. 16, before 25 s, it was a normal standing state, and the neural network based on a Bayesian backpropagation algorithm is executed. There are several signs of fall for t = 25 s to t = 40 s, and the control system has to be changed to fuzzy control to prevent the fall.
Output signals of velocity and torsion of the intelligent wearable device with the neural network based on a Bayesian backpropagation algorithm for a normal standing state during the time interval t = 25 s to t = 40 s.
Driving signals of velocity and torsion of the intelligent wearable device by using the FBC.
According to the controller design and simulation results based on the FBC, this study represents the experiment results of auxiliary standing support actions based on fall prevention for intelligent wearable devices of single and dual motor structures, respectively.
Figure 17 depicts the one-cycle normal-standing experimental results of the single-leg intelligent wearable device of single motor structure based on 1±0.2 s, 1.5±0.2 s, and 2±0.2 s from the squatting to standing position by using the FBC, respectively. When the intelligent wearable device senses that the angle position is less than 75° and the torsion load is greater than 0.4 Nm, this situation is the standing motion, and FBC assists the user with the appropriate velocity and torsion from the squatting to standing position according to the current angle position, velocity, and torsion load. When the angle position reaches 150°, the intelligent wearable device stops providing the auxiliary force. In Fig. 17, the torsion load does not change much because the torsion has reached the preset maximum value of 9.3 Nm for the single motor structure. Additionally, the intelligent wearable device of single motor structure provides different appropriate velocities based on 1±0.2 s, 1.5±0.2 s, and 2±0.2 s from the squatting to standing position according to the current angle position, velocity, and torsion load. Moreover, the starting velocity drops because the motor starts at a slower velocity than the user.
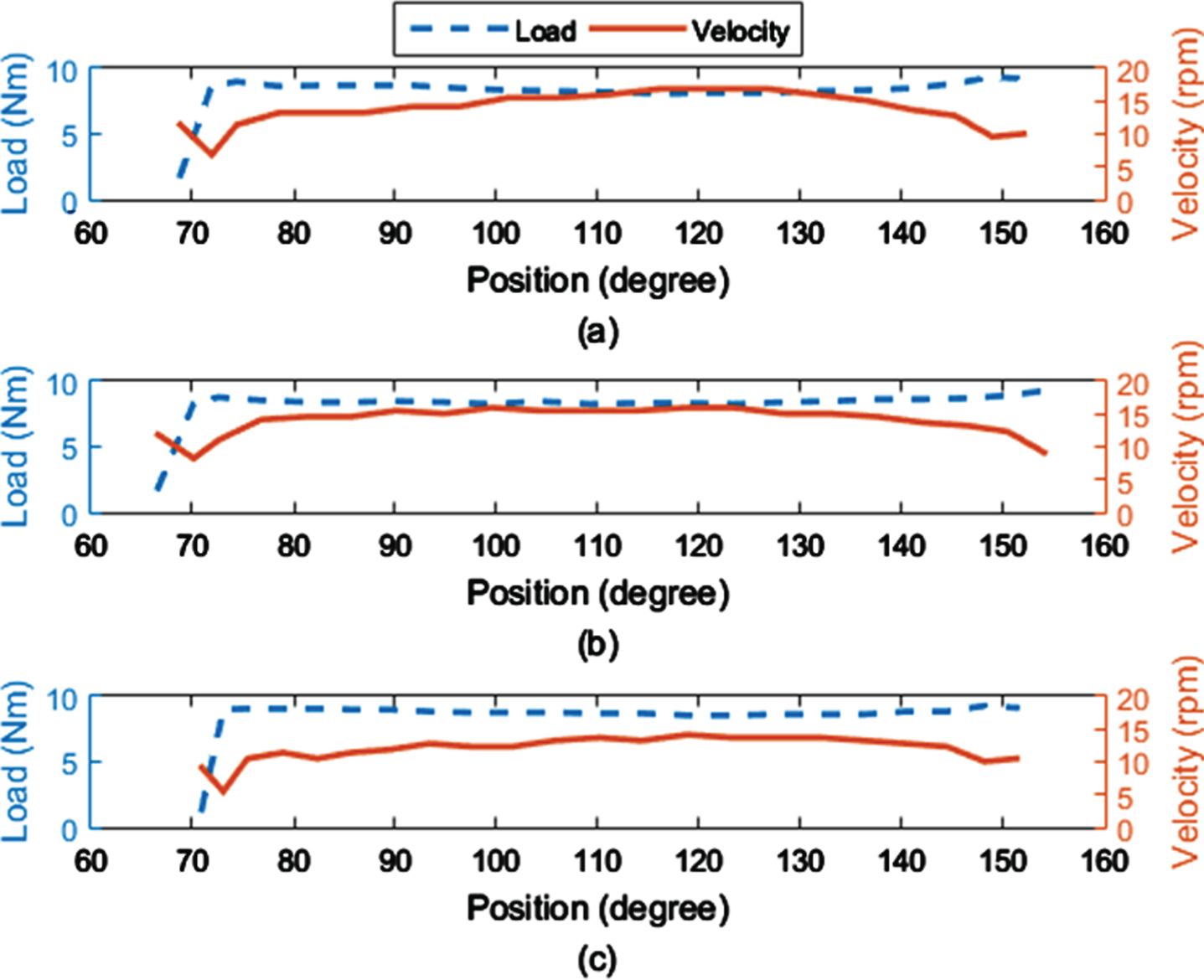
One-cycle normal-standing experimental results of single-leg intelligent wearable device of single motor structure based on (a) 1±0.2 s, (b) 1.5±0.2 s, and (c) 2±0.2 s from the squatting to standing position by using the FBC, respectively.
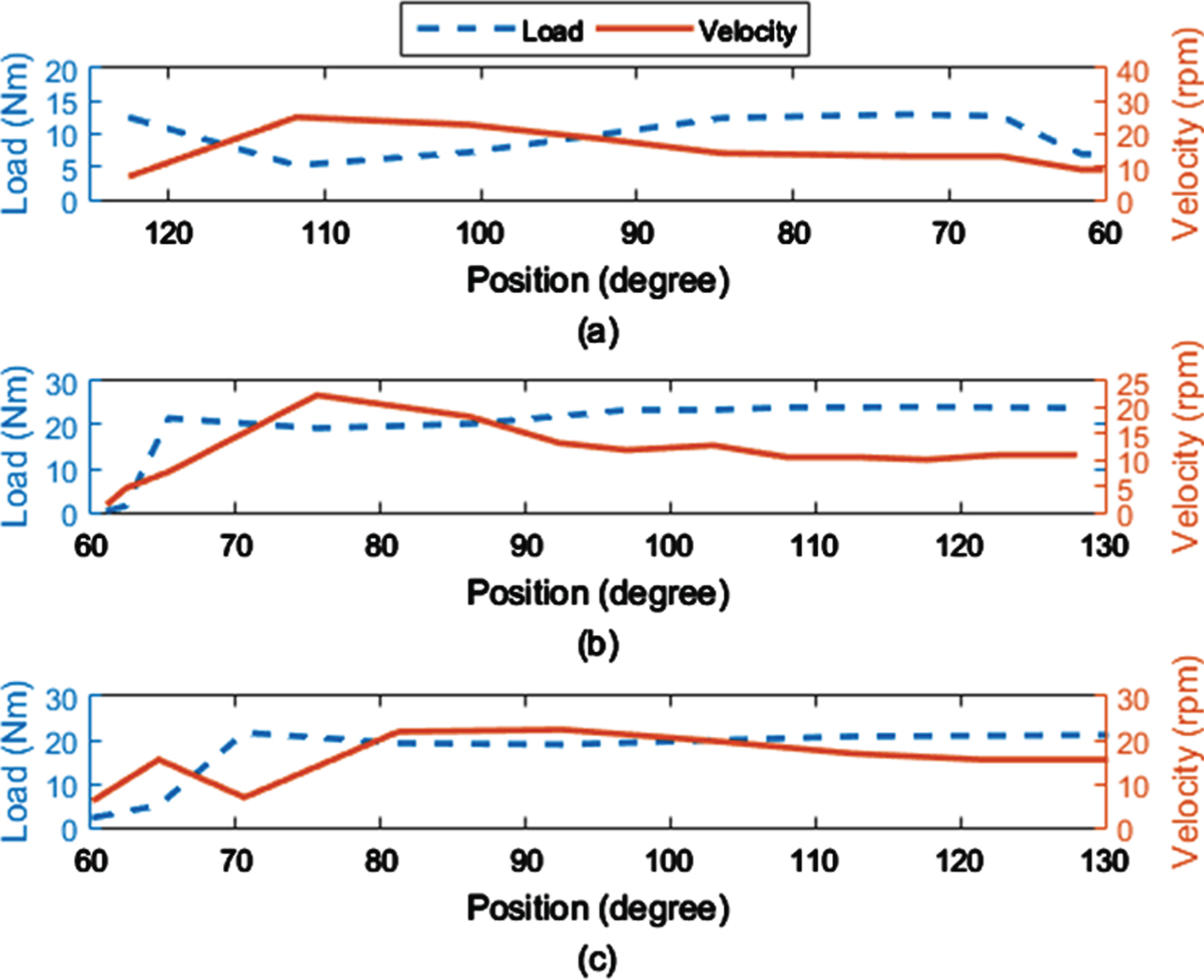
Figure 18 depicts the one-cycle normal-standing experimental results of the single-leg intelligent wearable device of dual motor structure based on 1±0.2 s, 1.5±0.2 s, and 2±0.2 s from the squatting to standing position by using the FBC, respectively. When the intelligent wearable device senses that the angle position is less than 60° and the torsion load is greater than 0.4 Nm, this situation is the standing motion, and the FBC assists the user with the appropriate velocity and torsion from the squatting to standing position according to the current angle position, velocity, and torsion load. When the angle position reaches 125°, the intelligent wearable device will stop providing the auxiliary force. In Fig. 18, the torsion load does not change much because the torsion has reached the preset maximum value of 21.6 Nm for the dual motor structure. As in the single motor structure, the starting speed drops because the motor velocity is slower than the user. Moreover, the intelligent wearable device of dual motor structure provides different appropriate velocities based on 1±0.2 s, 1.5±0.2 s, and 2±0.2 s from the squatting to standing position, according to the current angle position, velocity, and torsion load. Additionally, the intelligent wearable device of the dual motor structure provides an auxiliary force double than that of the single motor structure.
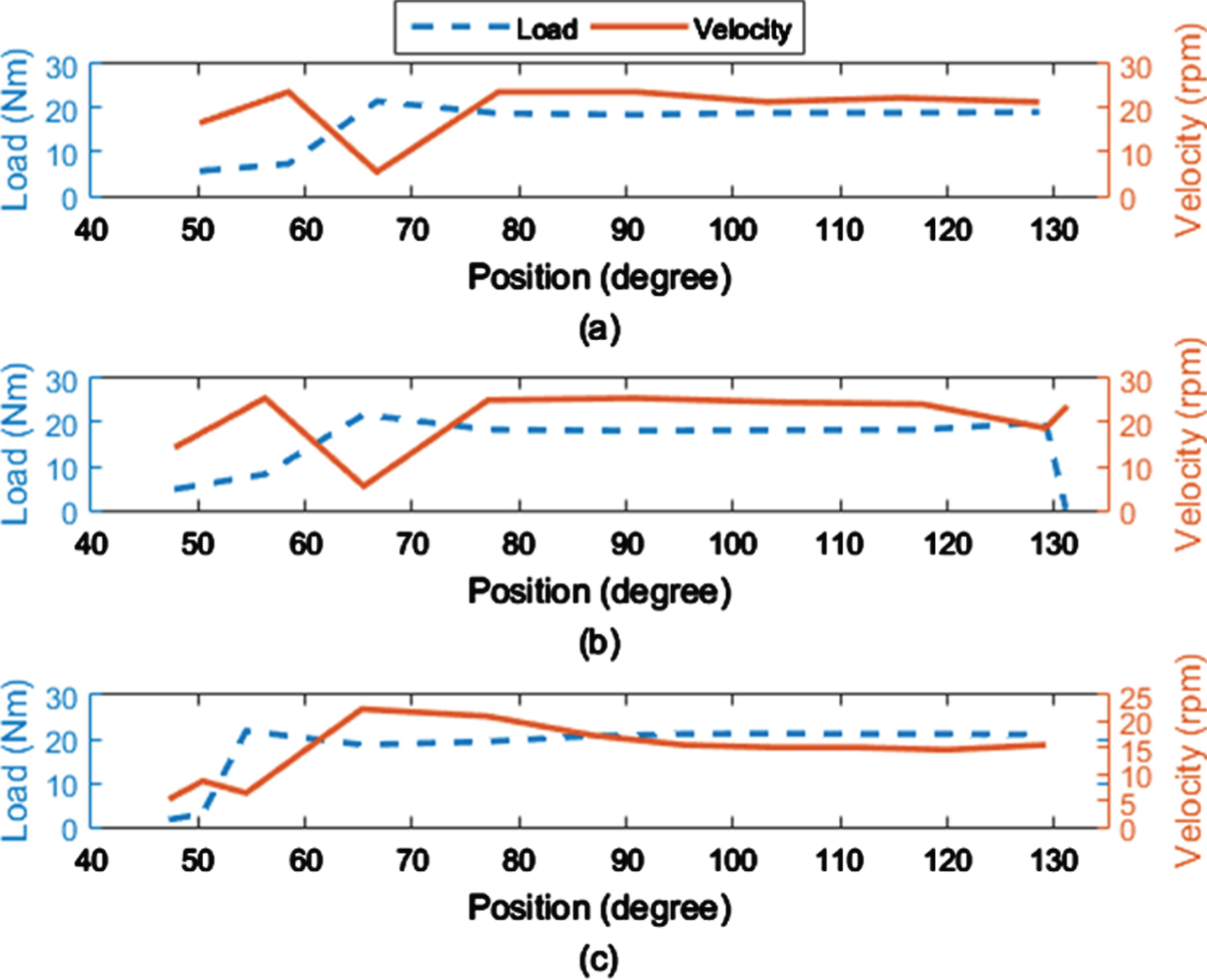
One-cycle normal-standing experimental results of single-leg intelligent wearable device of dual motor structure based on (a) 1±0.2 s, (b) 1.5±0.2 s, and (c) 2±0.2 s from the squatting to standing position by using the FBC, respectively.
In addition to provide an auxiliary force for an auxiliary standing support action, this study utilizes the FBC to prevent falls during workplace transport. Figure 19 depicts how the motors of the intelligent wearable device based on the FBC will rotate clockwise or counterclockwise to prevent a forward or backward fall during the movement of a box by the carrier, respectively. Figure 20 depicts the one-cycle experimental results of the single-leg intelligent wearable device of dual motor structure during a forward or backward fall and a normal standing position by using the FBC, respectively. When the intelligent wearable device senses that the angle position is less than 60° and the torsion load is greater than 0.4 Nm, this situation is judged as the standing motion, and the FBC assists the user with the appropriate velocity and torsion from the squatting to standing position according to the current angle position, velocity, and torsion load. When the angle position reaches 125°, the intelligent wearable device will stop providing the auxiliary force. Figure 20(a) shows a forward fall situation during the standing motion. The intelligent wearable device provides a very large torsion at the beginning to prevent the forward fall, allowing the user to squat down slowly. Figure 20(b) is a backward fall situation during the standing motion. The intelligent wearable device provides a large torsion to prevent the backward fall, allowing the user to stand up smoothly. Figure 20(c) shows a normal standing motion by using the FBC. Figure 21 shows five photographs, in order, from the squatting to standing position by using the FBC. The user squats down to attain a less than 60° angle position to enable the intelligent wearable device, as shown in Fig. 21(b). Then, the user stands up for an initial torsion greater than 0.4 Nm to enable the auxiliary force of the intelligent wearable device, as shown in Fig. 21(c). Finally, the user with the intelligent wearable device has a stable standing up position to initiate the workplace transport, as shown in Fig. 21(e). Therefore, laborers with intelligent wearable devices can do their work efficiently and safely, thus raising the working market competitiveness.
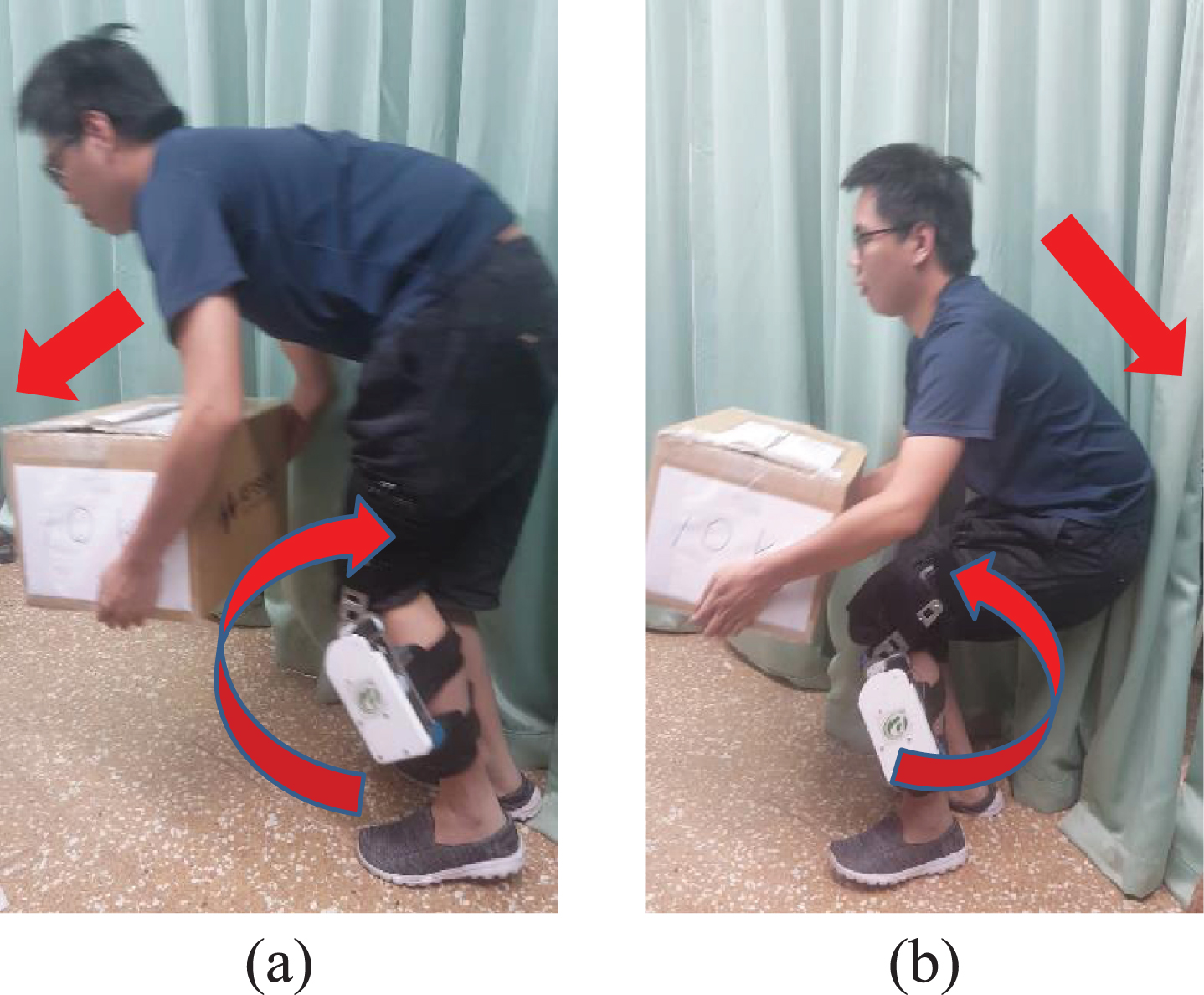
(a) Forward or (b) backward fall prevention during movement of a box by using the FBC.
One-cycle experimental results of single-leg intelligent wearable device of dual motor structure during (a) forward fall, (b) backward fall, and (c) normal standing by using the FBC.
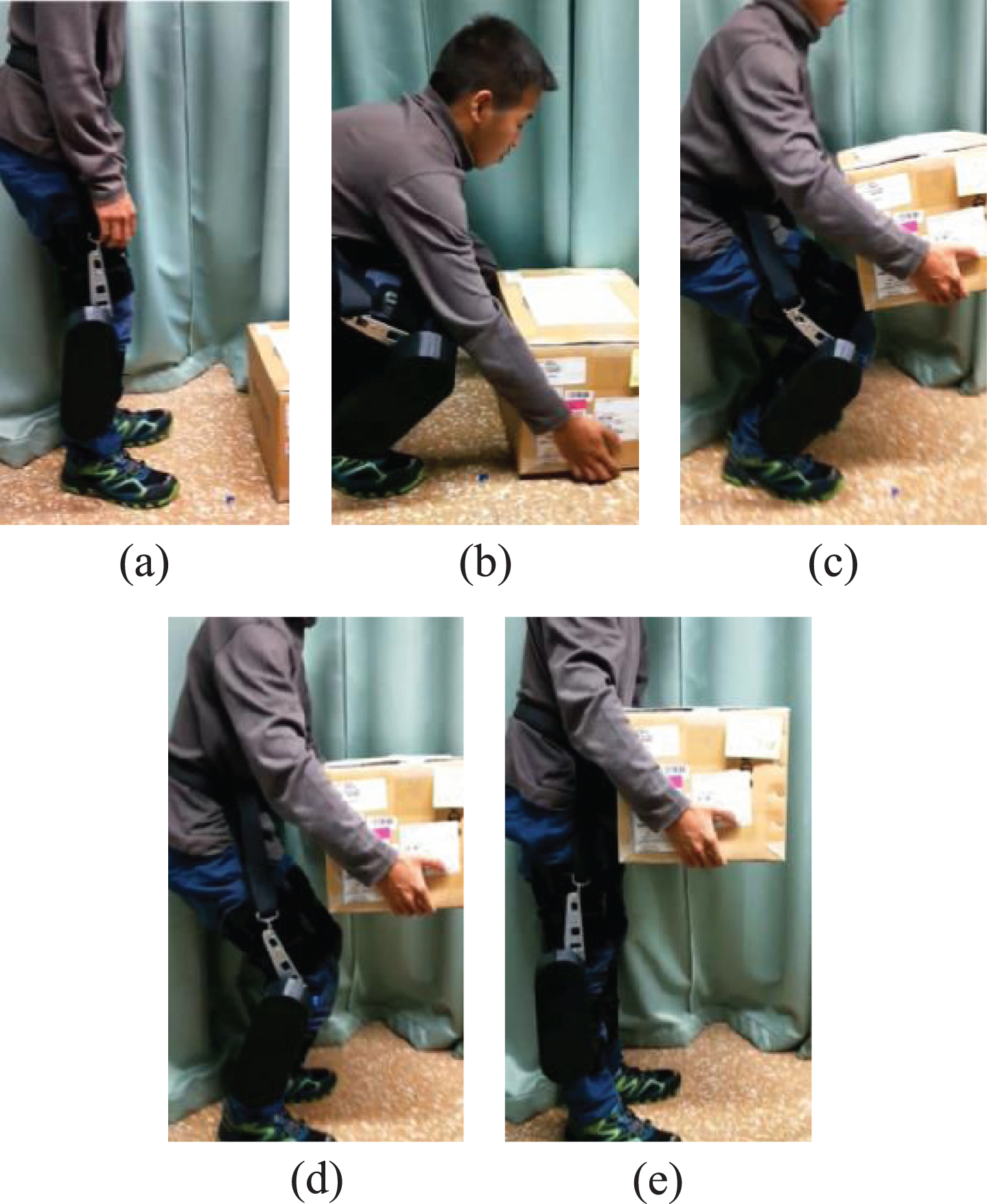
Five photographs in order, (a), (b), (c), (d), and (e), from the squatting to standing position by using the FBC.
This paper has presented an intelligent wearable device to provide auxiliary standing support and fall prevention during workplace transport. The intelligent wearable device provides the most suitable velocity and torsion depending on the initial driving torsion of the user by a Bayesian backpropagation algorithm based on the current angle position, velocity, and torsion load of the motor of the wearable device. A triaxial accelerometer is utilized to sense a fall and prevent it by an FBC method. Eventually, for a single motor structure, two knee auxiliary devices can generate a torsion of 18.6 Nm. For a dual motor structure, two knee auxiliary devices can generate around a torsion of 43.2 Nm. Although the intelligent wearable device of the dual motor structure does not provide a large auxiliary force, the success of this study demonstrates fall prevention and nearly 40% of the auxiliary force required for handling a box of 10 kg. In the future, this technology based on motors with higher torsion limitation will provide a higher auxiliary force during workplace transport. As a result, laborers will be able to perform their work more efficiently and safely.