
Abstract
In the process of group decision making, perturbation of input data always reduces the quality of the optimal solution or even makes it unfeasible. Hence, the value of the optimal solution is often limited. In this paper, a robust optimization method is proposed to overcome the inherent uncertainty of input data in group decision making (such as experts’ unit adjustment cost). Firstly, the minimum cost consensus model based on norm definition is established. Then, four different forms of uncertainty sets are proposed, and the corresponding robust models of four minimum consensus cost models are established. Finally, in order to evaluate the robustness of the solutions obtained by the robust consensus model, the results with different parameters are compared. The robust consensus model is also compared with the minimum cost consensus model. A numerical example proves that the result of the minimum cost consensus model is too optimistic, and the robust consensus model is more robust.
Introduction
As the decision-making environment becomes more complex, it is more difficult for decision makers to consider all aspects of a problem. Therefore, group decision making (GDM) has been studied by many scholars [1–4]. In GDM, different individual decision makers (DMs) struggle for a collective solution to a certain problem through communication and discussion. However, DMs usually come from different groups. Due to different cultural and educational backgrounds, they usually have different opinions on the same issue, which leads to inconsistency between groups [5–7]. Therefore, GDM needs a moderator with strong leadership and communication skills to persuade DMs to adjust their opinions to reach a final agreement, by taking various effective actions, such as providing resource compensation (collectively referred to as the cost of the consensus). Hence, the moderator always expects the lowest total cost of final consensus (such as time and cost).
Group consensus is mainly used to analyze the consistency of collective opinions. The consensus degree of GDM is related to the preference of DMs. The preference structure of DMs is usually represented in terms of utility functions, preference orderings or preference relations [8–13]. In addition, considering individual consistency in the consensus problem is conducive to reducing the time to reach consensus and obtaining more reliable results [14–19]. Zhang et al. [20] and Zhang et al. [21] studied the minimum adjustment distance of consensus reaching process from the perspective of consensus measurement. The former added the ordinal risk classes, while the latter proposed a 2-rank consensus reaching framework. In terms of opinion dynamics, Dong et al. [22] studied the minimum adjustment of consensus model in social networks and proposed a consensus building process based on the concept of leadership. A review of different approaches to the consensus-researching process can be seen in Zhang et al. [23], while a general framework for evaluating the efficiency of consensus is established.
Since the cost of reaching the final consensus is often complex and expensive. Hence, it is always expected to be as small as possible. Consensus models with minimal cost can be divided into two different groups: One is the works of Ben-Arieh and Easton [24] and Ben-Arieh et al. [25], the other is the works of Dong et al. [26]. Firstly, in the case of no budget constraint, Ben-Arieh and Easton [24] respectively used a single-criterion and a multi-criterion to make decisions for GDM problems with different weights of experts, so as to reach consensus and solve the minimum cost consensus problem. Ben-Arieh et al. [25] studied the methods of reaching consensus on the quadratic cost of single-criterion decision problems. They not only study the minimum cost consensus problem by looking for group opinion and limiting the distances between experts’ opinions and group opinion, but also adds the case of given budget constraint. They are all researches on the problem of consensus cost in the common sense. Then, Dong et al. [26] studied the decision-making consensus in the linguistic environment. And the linguistic ordered weighted averaging operator (LOWA), the 2-tuple ordered weighted averaging operator (TOWA) and the extended ordered weighted averaging operator (EOWA) were established to put forward a consensus operator by analyzing their relations. Other literature on these two groups of work can be seen in [27, 28] and [29, 30], respectively.
A connection between two groups is presented in Zhang et al. [31], where a new framework that combines the minimum cost consensus model with the aggregation operator was introduced. Meanwhile, they verified that the consensus model proposed by Ben-Arieh and Easton [24] is a special case of the new model. Recently, the theory of minimum cost consensus has received increasing attention. Considering opinions of DMs are usually random, Zhang et al. [32] constructed a minimum cost consensus model using stochastic programming. Tan et al. [33] proposed the stochastic optimization cost consensus group decision model with the minimum budget and maximum utility as the objective function, and studied the consensus under uncertainty information.
In the practical GDM, the existence of uncertainty is inevitable. Zhang et al. [34] and Ye et al. [35] studied the uncertainty of DMs’ opinions. The former proposed to solve the linguistic LGDM problem by multi-granular linguistic distribution assessments, while the latter implemented the multi-criterion group decision making with unbalanced hesitant fuzzy linguistic term sets based on classical TODIM. It is obvious to find that the unit adjustment cost of decision makers in GDM is mostly uncertain [36, 37]. Moreover, such a possibility cannot be ignored: even a small disturbance of the parameter may make the optimal solution suboptimal or infeasible. However, most of the existing researches on GDM assume that the parameters of the problem are fixed, such as setting the parameters to be representative values (expected values), which ignores the impact of its uncertainty. This explains the reason of wide attention on uncertainty in GDM. Generally, the uncertainty is characterized according to the quantity and type of known information.
The robust optimization (RO) method is a very useful tool for dealing with uncertainties in optimization problems. It is usually applied to the case where the exact distribution information of uncertain parameters is unknown and only its boundary value can be obtained. RO makes the optimal solution of the optimization problem not bound by any uncertain factors in a given uncertainty set, instead of finding a solution that is not affected by the uncertainty in a certain probability sense.
Robust optimization model induced by uncertainty set has been widely used in various decision problems. Soyster [38] is the first scholar to propose a robust optimization method. Later, Ben-Tal and Nemirovski [39–41] proposed an ellipsoidal uncertainty set model and found a robust counterpart of nominal problems. This makes the robust optimization method becomes a major research area in the optimization community. A review of robust optimization methods can be found in Gabrel et al. [42]. With the maturity of robust optimization theory, many researchers have begun to apply it to various fields to solve practical problems, such as portfolio problem [43, 44] and supply chain problem [45, 46]. Recently, there have been some topics that consider the combination of group decision making problem and robust optimization method [47–49].
However, there are few literatures on applying robust optimization method to the problem ofminimum cost consensus in the field of GDM. In this paper, four robust minimum cost consensusmodels under four uncertain sets are established to deal with the effect of uncertain parameters. Based on the minimum cost consensus model in the classical GDM problem, a new GDM optimization method to solve the uncertainty of the decision maker’s unit adjustment cost is proposed. By introducing the RO method, putting the decision maker’s unit adjustment cost into an uncertain set. Then the worst budget of the optimization model can be found, and the optimal solution that satisfies all situations in the worst case can be obtained.
In the classic GDM problem, the opinions of DMs are usually expressed by specific numerical values. However, in many practical applications, such as marketing plan, DMs must rank the urgency of each item in the plan and it is very difficult to use an exact number to indicate it. This paper considers using the weight of each item in the decision-making opinion of each decision-maker to replace it. The greater the weight, the more important the project will be. Then the decision maker’s opinion is changed from a fixed number to a vector or matrix, and we adopt a form of norm to represent the vector or matrix. In addition, four different forms of uncertain sets are considered: Box Set, Ball Set, Box-Ball set and Box-Polyhedron set. Based on these uncertain sets, four minimum cost consensus models with robustness are obtained. Numerical experiment shows that the robust models have strong robustness in dealing with uncertain parameter and generating robust solutions. And the model has the strongest robustness when the uncertain set is Box-Ball set.
The rest of this paper is organized as follows. Section 2 introduces the background and basic knowledge of the minimum cost consensus model. Section 3 presents four robust minimum cost consensus models. Section 4 is a numerical analysis. Section 5 is the conclusion and future work.
Models and methods
In this section, based on the research of consensus, taking stranded survival as an example, the consensus model with uncertainty minimum cost is introduced. Then, four different sets of uncertainties are proposed, and four robust cost models are obtained.
Basic model and decision problem
Imaging a scenario in which a plane carrying a group of people has an emergency landing and the driver is unfortunately killed. Due to the cold weather, bad conditions and the fact that they don’t know where they are, passengers have to find a way out. This requires passengers to prioritize what they have and choose according to their importance to escape. First of all, passengers need to decide whether to search for help with all of them, or the majority to wait, while a small number of people look for help. Since the amount of aid needed by most people is different from that needed by a small number of people, we assume that a consensus can be reached on collective action to find rescue. According to their own experience, each passenger independently ranked the materials according to their importance to survival and ranked them from the most important to the least important, with the importance represented by weight. Then expert with rich field survival experience will give the professional sequence. Comparing the sequence of each passenger, in order to ensure the safety of all passengers, expert need to persuade divergent passengers to change their opinions, usually by giving some compensation. Hence, our goal is to reach the final consensus at the lowest cost.
Based on the consensus research, the minimum consensus cost model proposed by Zhang et al. [31] is introduced. Let A ={ a1, a2, ⋯ , a
m
} be a set of m passengers, o
i
represent the opinion of a
i
,
Aggregation operators are often used to aggregate expert’s opinions in GDM problems. Considering different aggregation operators will get different opinions. Here, the weighted average (WA) operator to aggregate the opinions of experts is considered:
Meanwhile, the moderator always hopes that each expert can adjust his/her opinion in the direction that is beneficial to him/her, so the deviation between the moderate’s and the expert’s adjusted opinions should not be too large, and the parameter σ is adopted to constrain it:
Based on the above analysis, model (1) can be extended as follows:
In general group decision making, the opinions of experts and moderator and the unit adjustment cost are usually a fixed number. While in the case of island survival, each passenger and expert need to rank the materials, and cannot simply use a number. Here we rank according to the importance of each item for the escape of passengers and expert, that is, according to the weight. Let
In many practical situations, the unit adjustment cost is often uncertain. However, in the existing minimum cost consensus model, the unit adjustment cost is usually represented by a representative set of data (such as weighted average), which ignores its uncertainty. By putting unit adjustment cost into an interval, Li et al. [36] promoted the minimum cost consensus model. Based on goal programming theory and the rectilinear distance function, Cheng et al. [37] proposed the consensus and directional constraint model of the lowest cost, which is more flexible and can achieve lower costs compared with the traditional model.
Generally, the mathematical programming model finds the optimal solution by inputting accurate data but ignores that many data in real life are uncertain. Then when the input is no longer an exact number but a fuzzy number or interval, some constraints will not be satisfied, and the optimal solution may not be optimal or even infeasible. Therefore, it is necessary to establish a new model that is not affected by data uncertainty. It is well known that the robust optimization method is often used to deal withuncertain problems. By placing uncertain parameters in the uncertain set, the optimal solution of the optimization problem is no longer affected by the uncertainty of parameters. Even in the worst case, it can also get a conservative result. This urges us to use robust optimization method to deal with the uncertainty of unit adjustment cost so as to obtain a more robust optimal solution.
In this section, by putting the unit adjustment cost into four different uncertainty sets, four different minimum cost consensus models with robustness are obtained. Ben-Tal and Nemirovski [39, 41] consider the linear programming problem
The feasible solution of linear programming refers to the value points of any set of decision variables that satisfy all the constraints of the linear programming. The set of all feasible solutions is called the feasible domain of the linear programming. The optimal solution of linear programming is to make the objective function reach the optimal solution without sacrificing any general objective and sub-objective. The optimal solution must be the feasible solution, and the optimal solution set contains the feasible solution set.
Secondly, robust optimization is to solve the effect of uncertain parameters in the model through worst-case analysis and minimax models. The ultimate goal of robust optimization is to find a solution that satisfies all constraints, which is feasible in all possible cases and makes the value of the objective function optimal in the worst case. To understand this, let x N , x R represent the feasible solution and optimal solution of problem (6) respectively, and C (• ; U) represents the value of objective function under uncertain set U, then there is C (x N ; U) ≥ C (x R ; U). This means that x N cannot have a smaller value of C (• ; U), because it will conflict with the optimality of x R .
Moreover, when dealing with uncertain problem, its robust counterpart is defined as the minimum value of all possible robust solutions of the corresponding minimized optimization problem. Therefore, the objective function value of the robust optimization model proposed in this paper is the optimal value in the worst case, and it satisfies all the constraints in all cases.
The robust counterpart is very important for solving the optimal solution of the model in the worst case. When different uncertain sets are selected, the obtained robust counterparts are different, so the optimal solutions of the models are also different.
Therefore, if x is a robust feasible solution to model (6), it satisfies all realizations of the constraints from the uncertainty set U. And if a feasible solution is optimal for model (6), then it must be the optimal solution of model (5). Since model (6) is a semi-infinite programming problem, which is not easy to solve, we need to transform the original problem into a polynomial solvable convex optimization problem, usually a linear optimization or a quadratic optimization problem, which is also the key point of the robust optimization problem. In addition, when the uncertain set U is extended to its closed convex hull, the Robust Counterpart does not change, and the robust feasible solution remains unchanged. So, it is generally assumed that U is closed and convex.
In order to establish a robust optimization model corresponding to the MCC model, setting the unit adjustment cost c as an uncertain parameter and put it in an uncertain set. The uncertain set can be expressed as
Firstly, considering the interval uncertainty case, where the uncertainty set Z is a box set.
It is equivalent to
Then,
Due to the maximum value of the left-hand side on the inequality is
By substituting (10) into model (4), (Box-MCC) can be obtained. □
Different from Subsection 2.2.1, considering the uncertainty of ellipsoid in this part, where the uncertainty set is an ellipsoid set.
It is equivalent to
Therefore, the explicit constraint form of (7) can be obtained.
By substituting (13) into model (4), (Ball-MCC) can be obtained. □
Combining Subsection 2.2.1 and 2.2.2, when Z is the intersection of the concentric co-axial box and ellipsoid, the interval uncertainty and ellipsoid uncertainty need to be considered simultaneously, that is the Box-Ball set.
In this case, (7) can be expressed as a conic inequality system:
Obviously, M1ξ = [ξ ; 0], m1 = [
Let u = x1, v = Σ-1x2, (Box-Ball-MCC) can be obtained. □
In this part, the intersection of ∥ · ∥ ∞- and ∥ · ∥ 1- balls is considered, that is, the Box-Polyhedron set.
In this case, (7) can be expressed as a conic inequality system:
Obviously, M1ξ = [ξ ; 0], m1 = [
Since the model proposed in this paper is based on the classic GDM game of island survival, a series of problems related to program formulation, such as the plan formulation of marketing, the educational management of schools and the institutional reform of enterprises, can be solved by using the model proposed in this paper. In this paper, the sensitivity analysis of the models are analyzed by taking the problem of marketing plan as an example.
An appropriate marketing plan can help enterprises make better use of resources, better optimize the allocation of human, material and financial resources, and formulate the optimal strategic measures for competitors to grasp the best market opportunities. In the company’s marketing plan, the chairman plays the role of moderating, while the board members play the role of decision maker. In general, before implementing a new marketing plan, the chairman needs to negotiate with the board members to prioritize each item in the marketing plan to develop a marketing plan that is most beneficial to the development of the enterprise. Of course, in the process of negotiation, the chairman cannot avoid paying some resources (called the cost of compensation) to the board members to persuade them to change their opinions to a beneficial direction (i.e. the compensation is the minimum).
Numerical analysis
Suppose the board has four members a1, a2, a3, a4 and now there are five items in the marketing plan. The weights of the four members for the five items are o1 = (0 . 5, 1 . 9, 1 . 2, 2 . 8, 3 . 6), o2 = (0.7, 1.3, 2.5, 1, 4.5) , o3 = (2.5, 1.5, 1, 3.5, 1.5) ando4 = (1, 2 . 5, 3, 1 . 5, 2) respectively. At the same time, the weight of the chairman is ω = (0.1925,0.2425, 0.3425, 0.2225). In order to reach the final consensus, the chairman compensates for each member c1 = 8, c2 = 5, c3 = 2, c4 = 9. Since
Then let Ω (radius of the ball set) and τ be 2, (λ1, λ2, λ3, λ4) = (1, 4, 9, 16), assume that the deviation between the adjusted opinion of the board members and the chairman’s opinion cannot exceed 0.5.
By solving the four robust cost models, the minimum cost is 77, 78.54, 70.80, 72.92 respectively. The deviation between the initial opinion and the adjusted opinion is d = (2.5, 1.7, 7.1, 2.3) T and the final consensus is o c = (0.7, 1.9, 2.5, 1.5, 3.4), indicating that the fifth item is the most important. Obviously, the difference between the original opinion o3 of the third member and the final consensus opinion o c is the largest, and the difference between the second member o2 and the final consensus opinion o c is the smallest.
By comparing the results of the four robust cost models, it can be clearly found that when the uncertainty set changes, only the minimum cost changes, while the final consensus opinion remains unchanged, and the deviation between the original opinion of the member and the final consensus opinion remains unchanged. It is easy to understand that the unit adjustment cost of each member in the model is uncertain and is put in the uncertainty set. Therefore, when changing the shape of the uncertainty set, only the unit adjustment cost has changed. Hence, there is only the minimum cost changes in the end. At the same time, the other interesting finding is that under the four uncertain sets, the total cost under the third uncertainty set is the smallest, which means that (Box-Ball-MCC) has the strongest robustness.
Comparison analysis
The effect of the adjustment cost deviation
In 3.1, we assume that c0 = c, and c l takes the upper and lower deviations of c0. It is necessary to study whether the change of deviation c l will affect the total cost of consensus and the deviation between members’ opinions and their adjusted opinions. To do this, setting several different c l , keeping the values of other parameters unchanged to obtain the value of the total cost. Since C is a matrix, a norm of C to represent the magnitude of the deviation is adopted. And the change of the minimum cost is discussed when the upper and lower deviations increase respectively. Meanwhile, the change of the minimum cost when the number of members is different is also researched. The results are shown in Fig. 1.
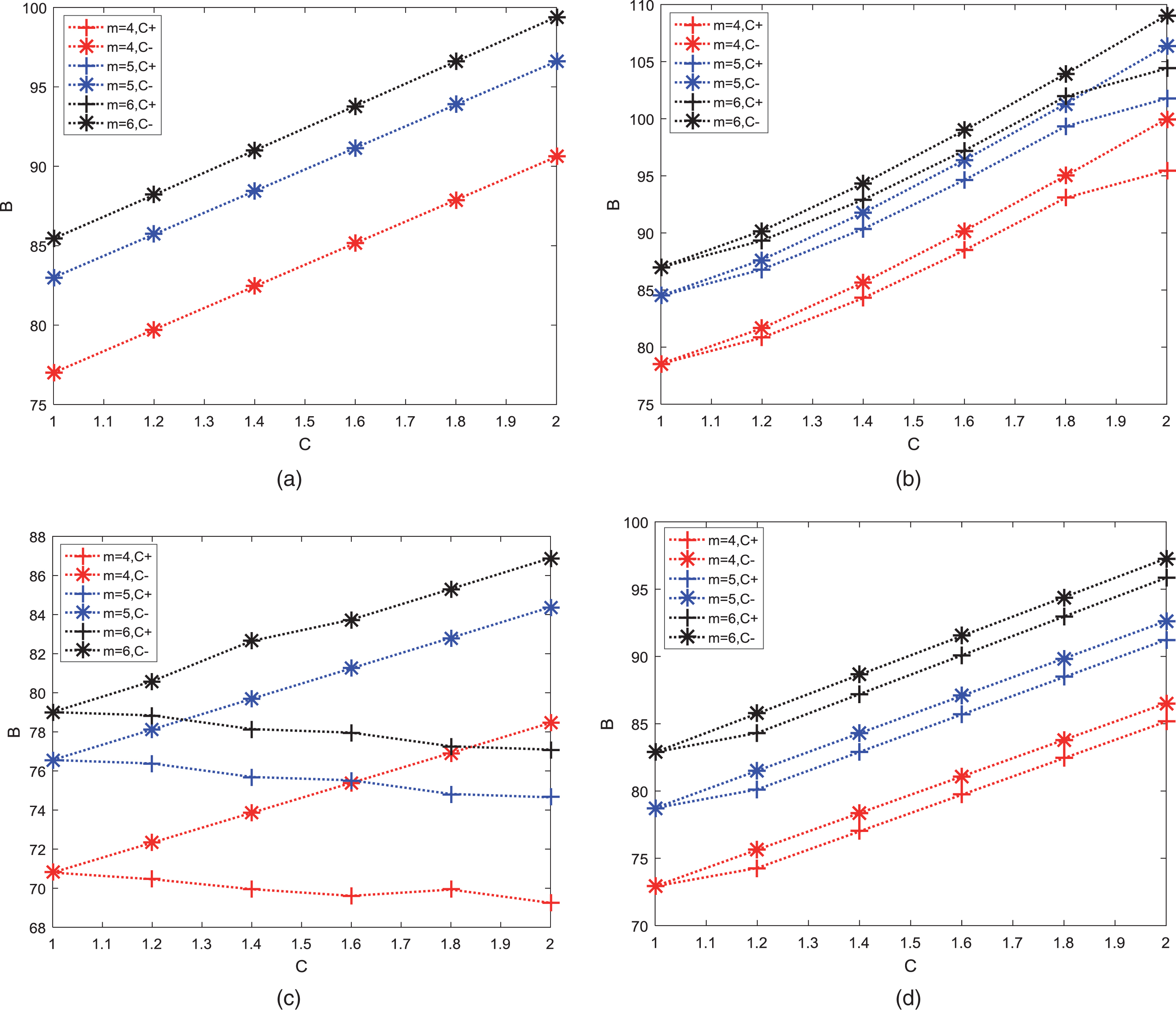
Result of B under uncertain set. (a) Box set; (b) Ball set; (c) Box-Ball set; (d) Box-Polyhedron set.
Figure 1(a) shows the change of the minimum cost with c l in Box set. It is not difficult to find that B is proportional to c l , and the increase of the upper and lower deviation of c l has the same effect on B. Figure 1(b) shows that the minimum cost with c l in Ba-ll set, and B still increases with the increase of c l . What is different from the Box set is that the effect of the upper and lower deviations of c l on B is no longer the same. Obviously, the lower deviation of c l has a greater impact on B. Figure 1(c) shows the change of B when considering the Box-Ball set, the increase of the upper and lower deviation of c l has the opposite effect on B. When the upper deviation of c l increases, B decreases, while when the lower deviation of c l increases, B increases. Of course, as shown in Fig. 1(b), B has a larger amount of variation in the downward deviation of c l . Figure 1(d) shows the change of B when considering the Box-Polyhedron set. It can be surprisingly found that the effect of the upper and lower deviations of c l on B is very similar to that of the Ball set. But in contrast, the rate of change of B in (d) is smaller, indicating in model (18), B is less affected by the fluctuations of the unit adjustment cost. In a sense, (Box-Polyhedron-MCC) is more robust than the (Ball-MCC).
In general, ∥C∥ increases, and the minimum cost increases. As the number of members increases, so does the minimum cost. This finding means that the greater the deviation of each member’s unit adjustment cost, the more resources the chairman needs to compensate; the more members there are, the more difficult it is to reach a consensus. In addition, there is an interesting finding that when the number of members increases from m = 4 to m = 5, the increase of B is significantly larger than that from m = 5 to m = 6, that is to say, although B increases with m, but the growing rate of B decreases with the increase of m, which may be related to the phenomenon that the members are more prone to herdity as the number of members increases. When this happens, the adjustment costs between the members becomes closer, thus the growth of B is reduced.
In the model (8), the fluctuation of adjustment cost in Box set is considered, in which the uncertainty level parameter is 1 and the uncertainty set is converted into Interval set. However, in the models (11), (15) and (18), the uncertain level parameters are not given (such as the radius of ellipsoid set and the level parameters of polyhedral set). Hence, the relationship between the change of uncertain level parameters and the total cost is expected to be studied.
Figure 2 shows the variation of the minimum cost B with Ω under different uncertain level parameters. The left shows the variation of the minimum cost B with Ω under Ball set with different number of members. It is clear that the larger Ω is, the larger B is, and B will always increase without limitation. The middle shows the change of B with Ω when the uncertainty set is the Box-Ball set. The interesting thing is that regardless of how Ω changes, B remains unchanged. In the right, considering the change of B when the uncertainty set is the Box-Polyhedron set. B first increases with the increase of τ, and the rate of change becomes smaller and smaller. Finally, when τ = 4, B reaches the maximum value and keeps the balance. In general, it can be found that as the radius of ellipsoid set increases, the minimum cost increases. In fact, the increase of ellipsoid set’s radius means the fluctuation of the unit adjustment cost is larger, which is similar to the increase of deviation C in Subsection 3.2.1. Hence, it increases the difficulty of reaching consensus and makes the total cost increase. However, in model (15) and model (18), B does not increase with the increase of Ω, and even remains unchanged, which is related to the selection of uncertain sets. Model (11) only considers a single Ball set, so B will always increase (decrease) with the increase (decrease) of Ω While model (15) and model (18) consider the combination of multiple sets, which may weaken the influence of uncertainty level parameters on B, thus the phenomenon studied in this paper will occur. At the same time, it can be found that the cost of model (15) is smaller than that of model (18), so it can be considered that (Box-Ball-MCC) is the most robust.
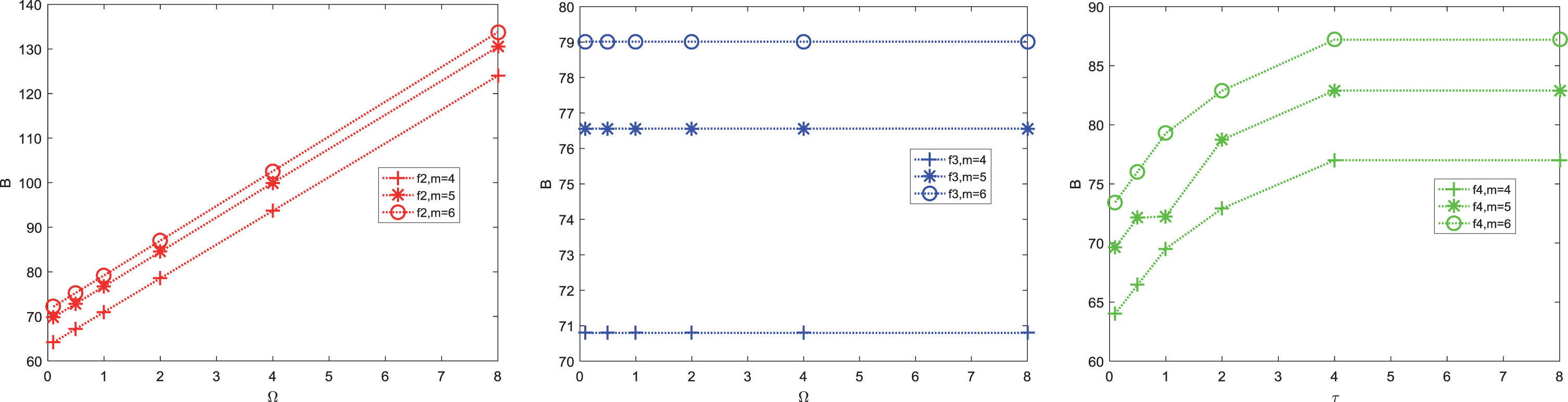
The variation of the minimum cost B with Ω under different uncertain level parameters.
There is also a parameter σ in the model, which represents the threshold for the deviation between the adjusted opinion of the member and the opinion of the chairman. In other words, this deviation is limited. it is also necessary to study how it will affect the total cost of reaching a consensus. To do this, different σ is set, and the results as shown in Tables 1 and 2.
Results of five models under different σ
Results of five models under different σ
Results of the deviation of members’ opinion under different σ
Table 1 shows that the minimum cost B decreases with the increase of σ, whether it is the original model or the robust model proposed in this paper. In addition, the Table 2 indicates that the deviation d of the members before and after the change of opinion varies with the σ, and the larger σ is, the smaller d i (i = 1, 2, 3, 4) is. This is easy to understand, the larger σ is, the more relaxed our requirements for the deviation of opinions between the chairman and the members are. If there is still a discrepancy between the opinion of a member and that of the chairman after a member has adjusted his opinion. However, as long as it is within the scope of required, then the member will no longer have to adjust his or her opinion. That is, the larger σ is, the smaller the adjustment to be made by the member, thus the smaller the deviation of the member before and after the change of opinion, the smaller the deviation d i . The chairman needs to compensate the less resources, that means the smaller the minimum cost B is.
In the previous three parts, the influence of each parameter on the results of the robust consensus model is considered. Next, we want to compare the result of the original model with the results of the four robust models proposed in this paper, so as to detect whether it is meaningful to consider uncertainties and solve this problem with the robust optimization method. For this reason, under the same parameters, we use the data of Subsection 3.1 to solve the original model and robust model sequentially. The total cost results are shown as Table 3.
Minimum cost of five models and their pessimistic coefficient
Minimum cost of five models and their pessimistic coefficient
From the Table 3, it can be clearly found that the solution of the robust model is larger than the optimal solution of the original model, which means that in the case of the original model, that is, the definite situation, the moderator is too optimistic in making the final decision. It does not consider that the uncertainty of the data may increase the total cost. For example, in order to make the first member to change his opinion, his unit adjustment cost is expected to be 8. However, he may be affected by some factors such as the views of other members or the environment, so he may not be willing to change his own opinion. Then the chairman will need to compensate the member for more resources, making the total cost increase. However, under certain circumstances, the chairman only needs to compensate each member according to the determined unit adjustment cost, ignoring the uncertainty factors, so the result is too optimistic.
In addition, an interesting finding is that the minimum consensus cost increases differently compared with the original model under different uncertainty sets. Taking the case of four members as an example, under the Ball set, the increase of the total cost is the largest, from 63.4 to 78.5443, increased by 23.89%. Under the Box-Ball set, the increase of the total cost is the smallest, from 63.4 to 70.795, it only increased by 11.66%. Here, the pessimistic coefficient θ (0 < θ < 1) is introduced. When θ = 1, it indicates that the decision-makers are very conservative when making decisions, and they are too pessimistic about future returns. When θ = 0, it means that investors have a risk preference when making decisions, so decision-makers are too optimistic about future returns. 0 < θ < 1 indicates that the attitude of DMs change between being too optimistic and being too pessimistic. Here, the pessimistic coefficients of the four robust models are 0.2145, 0.2389, 0.1166, 0.1502, respectively. The larger the pessimistic coefficient, the greater the difference between the optimal solution of the original model and the robust model, which means that the consensus reached under the robust model is more pessimistic. That is, the more optimistic the consensus is under certain circumstances, the more resources the chairman will have to compensate for uncertain factors. Therefore, when considering the third kind of uncertainty set, not only the influence of parameter uncertainty is considered, but also the total cost is as small as possible. It can be considered that Box-Ball-MCC is better than the other three robust models. The consensus opinion obtained at this time is o = (0.7, 1.9, 2.5, 1.5, 3.4). Therefore, when developing the marketing plan, the fifth project accounted for the largest weight, that is, the fifth item was agreed to be the most urgent and should be given priority.
In conclusion, although the optimal solution of the robust model is more conservative than the optimal solution of the original model, it is often called the price of robustness [50]. But in the robust model, the loss due to the uncertainty can be avoided as much as possible, since even exists tiny perturbation uncertain data, the impact of the study may also be catastrophic, so it is necessary and meaningful to research the minimum consensus cost model with robustness.
Uncertain factors often arise in GDM, such as the unit adjustment cost of experts, which are very unfavorable for reaching consensus. In this paper, the method of robust optimization is adopted to make the unit adjustment cost fluctuate in an uncertain set. Then, four different uncertain sets (i.e., Box set, Ball set, Box-Ball set, Box-Polyhedron set) are considered, and four minimum cost consensus models with robustness are constructed. Meanwhile, the objective function of the robust optimization model is to find the minimum value of the total cost in the worst case. The constraint conditions include: the fluctuation range limitation of the uncertain parameter (i.e., the unit adjustment cost of the expert), the deviation between the expert’s adjusted opinion and the moderator’s opinion does not exceed a certain threshold.
In addition, in the classic group decision making problems, the opinions of experts and moderator are expressed with a fixed number. But in the case of stranded survival, experts and moderator need to give their opinions according to the importance of each supply for sorting. It usually represented as a vector form, and a norm form is introduced which can convert the vector into a fixed number, and obtains a robust optimization model with a norm. Then, taking the development of a marketing solution as an example, the proposed robust model is illustrated and the YALMIP toolbox is introduced to solve the robust model. The greatest feature of YALMIP is the ability to integrate many external optimization solvers, making it extremely simple to solve general optimization problems, especially SDP problems. Therefore, adopting the YALMIP toolbox can provide a satisfactory solution to the robust consensus model. Finally, some meaningful conclusions are obtained through the case analysis: The greater the fluctuation of the uncertain parameters, such as the increase of the upper and lower deviation of c
l
and the increase of the radius of ellipsoid set, the less ideal the optimal solution of the optimization problem is, that is, the worse the robustness of the model is. However, when several uncertain sets are considered at the same time, the influence brought by the change of ellipsoid set radius will be weakened, which will also affect the robustness of the model; The threshold of the deviation between experts and moderator will also affect the optimal solution of the model. The larger the threshold value is, the more relaxed the requirements for the expert in order to reach the final consensus is, and the smaller the total cost is; The robust consensus model is to find the minimum cost to reach the consensus in the worst case, and its optimal solution is larger than the optimal solution of the original model, indicating that the result obtained in the case of certainty is too optimistic, so the phenomenon of minimum cost increase appears when the influence of uncertain factors is taken into account.
This paper provides a solution for reaching consensus within the group from the perspective of optimization, but it fails to consider that the opinions of the decision makers may obey a certain probability distribution. Therefore, if these factors are included in the proposed robust consensus model in future work, the proposed model can be applied to a wider range of situations. In addition, only a few decision-makers have been researched in this paper, and the scale is relatively small. Expanding the size of the research object will greatly increase the difficulty of solving the model. Therefore, it is significant to generalize the model proposed in this paper to a large-scale situation in future research.
Footnotes
Acknowledgments
The work is supported by Natural Scientific Foundation of China (No. 71571055). We are very grateful to the editors and referees for their careful reading and constructive suggestions on the manuscript.