
Abstract
This paper focuses on the path planning of mobile robot. Fuzzy logic is employed to deal with the uncertainty in the process of path planning. The hierarchical interval type-2 fuzzy method is obtained by combining the hierarchical fuzzy and interval type-2 fuzzy method, which is used in the path planning of mobile robot. Hierarchical fuzzy structure can simplify complex system and get fuzzy rules more easily. For multi input system, it can also solve the problem of rule explosion. Compared with type-1 fuzzy, interval type-2 fuzzy can better deal with the uncertainty in the process of path planning. Finally, in order to get a better path, genetic algorithm is used to optimize the membership function in the fuzzy path planner. Through the simulation experiment, the proposed hierarchical type-2 fuzzy planning method can effectively solve the path planning problem. Compared with the type-1 fuzzy method, the interval type-2 fuzzy method and the hierarchical type-1 fuzzy method, the proposed method obtains better results.
Introduction
Mobile robot is one of the hot spots in the current society, which is widely used in many fields [1]. Path planning requires that robots can decide their own path according to existing information, avoid obstacles and reach the target point. Therefore, it is one of the core contents of mobile robot research. Robot path planning methods can be divided into two categories [2]. One is classical methods, such as cell decomposition method (CD) [3], potential field method (PFM) [4], subgoal method (SG) and sampling-based methods. The other is heuristic methods, which includes neural network (NN) [5, 6], fuzzy logic (FL) [7] and nature inspired methods (NIM, for instance, genetic algorithm (GA) [8], Particle Swarm Optimization (PSO) [9], Ant Colony Optimization (ACO) [10]) and hybrid algorithms [11]. However, in the process of path planning for mobile robots, there are many inaccurate and uncertain situations, such as inaccurate sensor information, uncertain implementation of robots and so on. At this time, we need to choose an appropriate method to deal with these uncertain problems, such as fuzzy logic algorithm.
Fuzzy logic has been widely studied in the path planning of mobile robots due to its ability to deal with uncertainties [7, 12–19]. For examples, a fuzzy algorithm is proposed for mobile robot motion planning in unknown environments 12]. The algorithm defines 13 forward directions and obtains the priority of each direction by using fuzzy reasoning. Then the direction of the robot is the direction with the highest priority. However, this algorithm only considers the direction of the robot, not its speed. Moreover, a hierarchical type-2 fuzzy control system based on behavior coordination is proposed for autonomous mobile robot navigation[13]. But the parameters in this system are not optimized. In addition, in order to reduce the complexity of the system, the number of fuzzy sets of input variables is relatively small. Interval type-2 fuzzy neural network is also applied to obstacle avoidance of mobile robots [14]. However, from the simulation results, the obstacle avoidance effect is not obvious, and the robot will move to the designated target, but it can’t reach the target accurately. Furthermore, for unknown dynamic environment, a two-level hierarchical structure is designed [15]. And the first layer is the risk assessment fuzzy controller, the second layer is the speed fuzzy controller. But in the second layer, the fuzzy rules are complex and not simple enough. The existing path planning method based on fuzzy logic still has room for improvement. The type-1 fuzzy is simple and clear, but it can’t deal with more uncertain situations. Type-2 fuzzy can deal with more uncertainties, but it is difficult to determine the division of type-2 fuzzy sets based on experience. The common rule explosion problem in fuzzy system is also considered. Therefore, a new hierarchical type-2 fuzzy method based on genetic optimization is proposed for the path planning of mobile robots in this paper.
Since fuzzy logic appeared, it has been widely studied [20–26]. The proposed method combines the hierarchical structure proposed by Raju [27] and the type-2 fuzzy system proposed by Zadeh [28]. On the one hand, when the input variables are added to the fuzzy system, the rule number of the single-layer fuzzy system will increase exponentially, result in rule explosion. And hierarchical structure can solve this problem, because its number of rules increases linearly with the increase of input variables. It can also make complex problems more intuitive and easy to understand. On the other hand, path planning is faced with many uncertainties, such as inaccurate sensing information, uncertain environment and uncertain implementation. The traditional type-1 fuzzy system has limitations in describing and dealing with uncertainties, so the type-2 fuzzy controller is used to increase the ability of dealing with uncertainties [29–35]. The combination of hierarchical structure and type-2 fuzzy not only makes the complex path planning problem simpler and easier to implement, but also can deal with the uncertainties in the process of path planning more effectively. Because the membership function and fuzzy rules of the fuzzy controller are usually derived from experience, the system is usually not optimal or suboptimal. It is well-known that genetic algorithm is a common optimization algorithm of fuzzy controller, which can be seen in many papers [36–40]. For instance, some studies try to combine genetic algorithm and fuzzy algorithm to find the optimal path of mobile robot motion in structured dynamic environment [36]. Moreover, genetic algorithm is used to optimize the proportion factor in the fuzzy controller to improve the precision and smoothness of the trajectory tracking [37]. To obtain better performance, genetic algorithm is used to learn some subjective parameters of fuzzy controller [38]. In this paper, genetic algorithm is used to optimize the membership function of the hierarchical type-2 fuzzy controller in order to obtain better parameters.
This paper focuses on the path planning algorithm based on hierarchical type-2 fuzzy and genetic optimization. The distance from the robot to the detected obstacle and the angle between the target and the detected obstacle are selected as the inputs of the first level interval type-2 fuzzy system, and the turning angle of the robot is obtained as output. The output of the first level fuzzy system and the distance from the robot to the detected obstacle are used as the inputs of the second level interval type-2 fuzzy system, and the forward step of the robot is obtained as the output. Thus, the distance from the robot to the detected obstacle is used twice, which makes use of more comprehensive combination information. Compared with the type-1 fuzzy method, the interval type-2 fuzzy method and the hierarchical type-1 fuzzy method, the proposed hierarchical type-2 fuzzy method obtains better results. The contributions of this paper are summarized as follows: (1) with only two input information, i.e.the distance from the robot to the detected obstacle and the angle between the target and the detected obstacle, the hierarchical fuzzy structure is used to make full use of the sensing information and eliminate the rule explosion. (2) using interval type-2 fuzzy logic to improve the performance of path planner and the ability to cross complex obstacles. (3) genetic algorithm is used to determine the parameters of the path planner. The simulation results show the superiority of the proposed hierarchical type-2 fuzzy planner.
This paper is organized as follows.The second part will design a hierarchical type-2 fuzzy planner. The third part will optimize the planner by genetic algorithm. The fourth part is the simulation results. The fifth part is the conclusion.
Design hierarchical type-2 fuzzy path planner for wheeled mobile robot
This part mainly designs a specific hierarchical type-2 fuzzy planner for path planning of wheeled mobile robots. The details are as follows.
Wheeled mobile robot
The mobile robot moves in the coordinate environment shown in the Fig. 1. In this coordinate system, the kinematics equation of the robot is as follows:
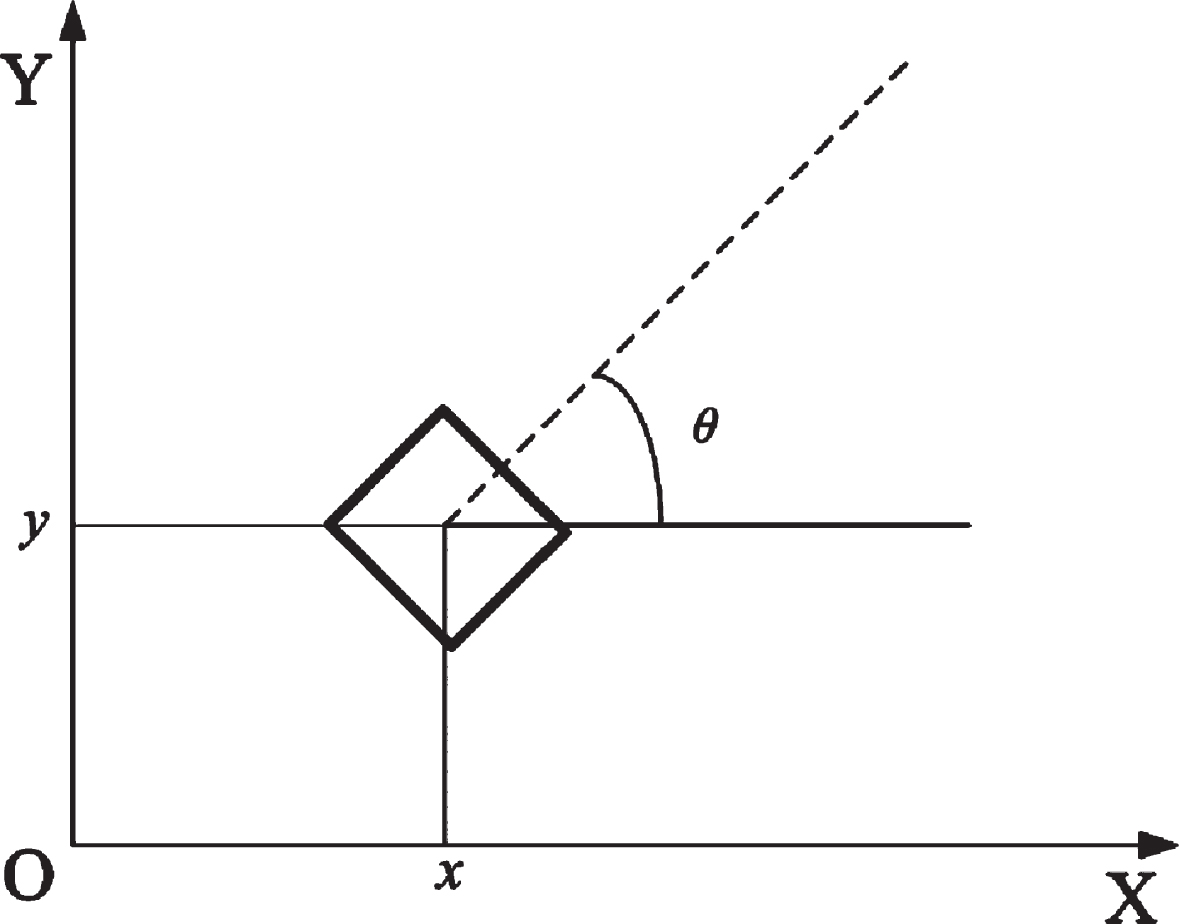
Robot coordinate system.
The path planning of mobile robot is that in the environment where the coordinates of obstacles are unknown, the robot moves from the starting point to the target, in which obstacles need to be detected and avoided. As shown in the Fig. 2.
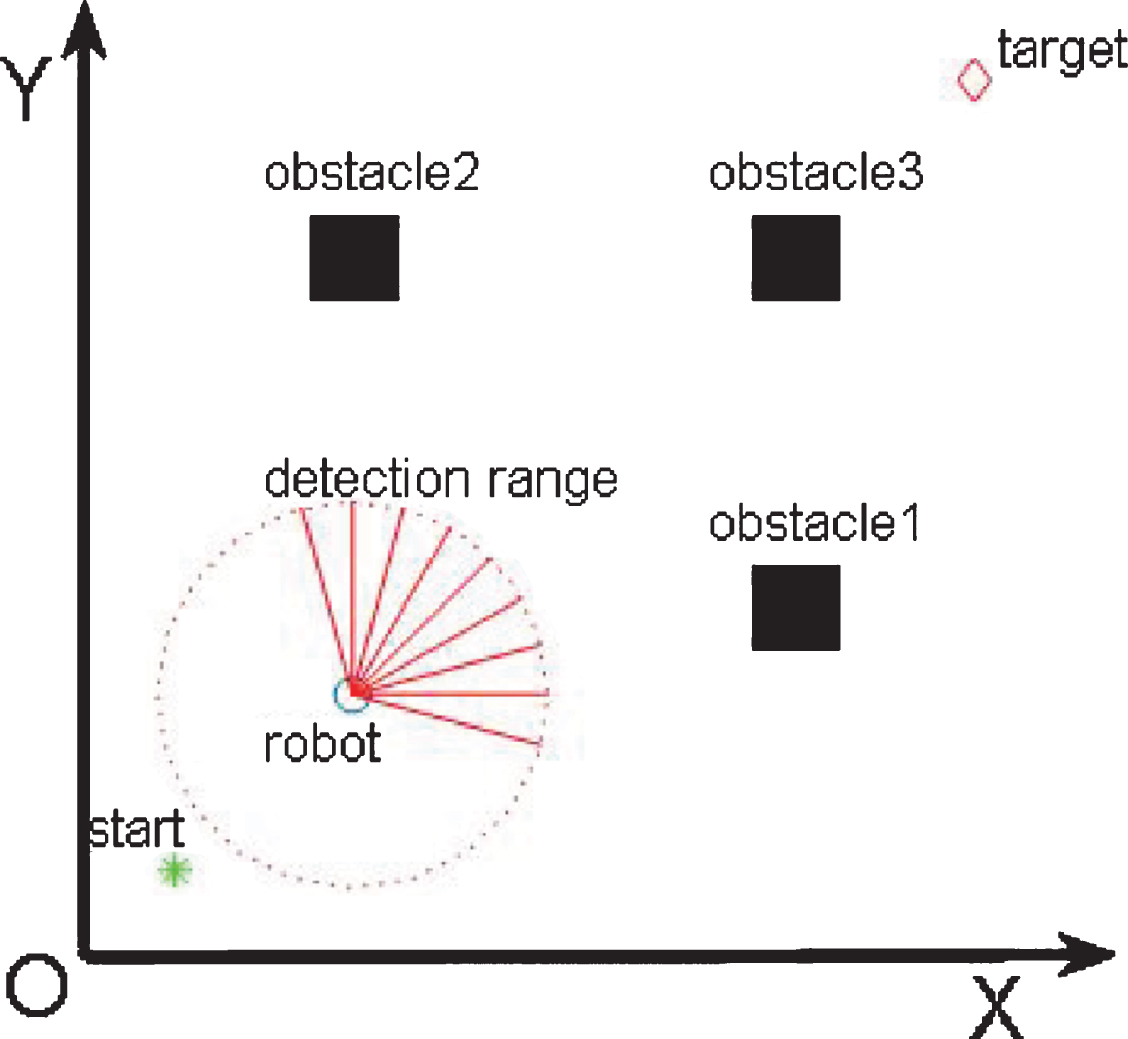
Path Planning Environment for Mobile Robots.
Following is a detailed description of the proposed hierarchical type-2 fuzzy system and its application to path planning of mobile robots in unknown obstacle environments.
For a fuzzy system with n input variables, if each input variable defines m fuzzy sets, the rule number of a single-level fuzzy system is m
n
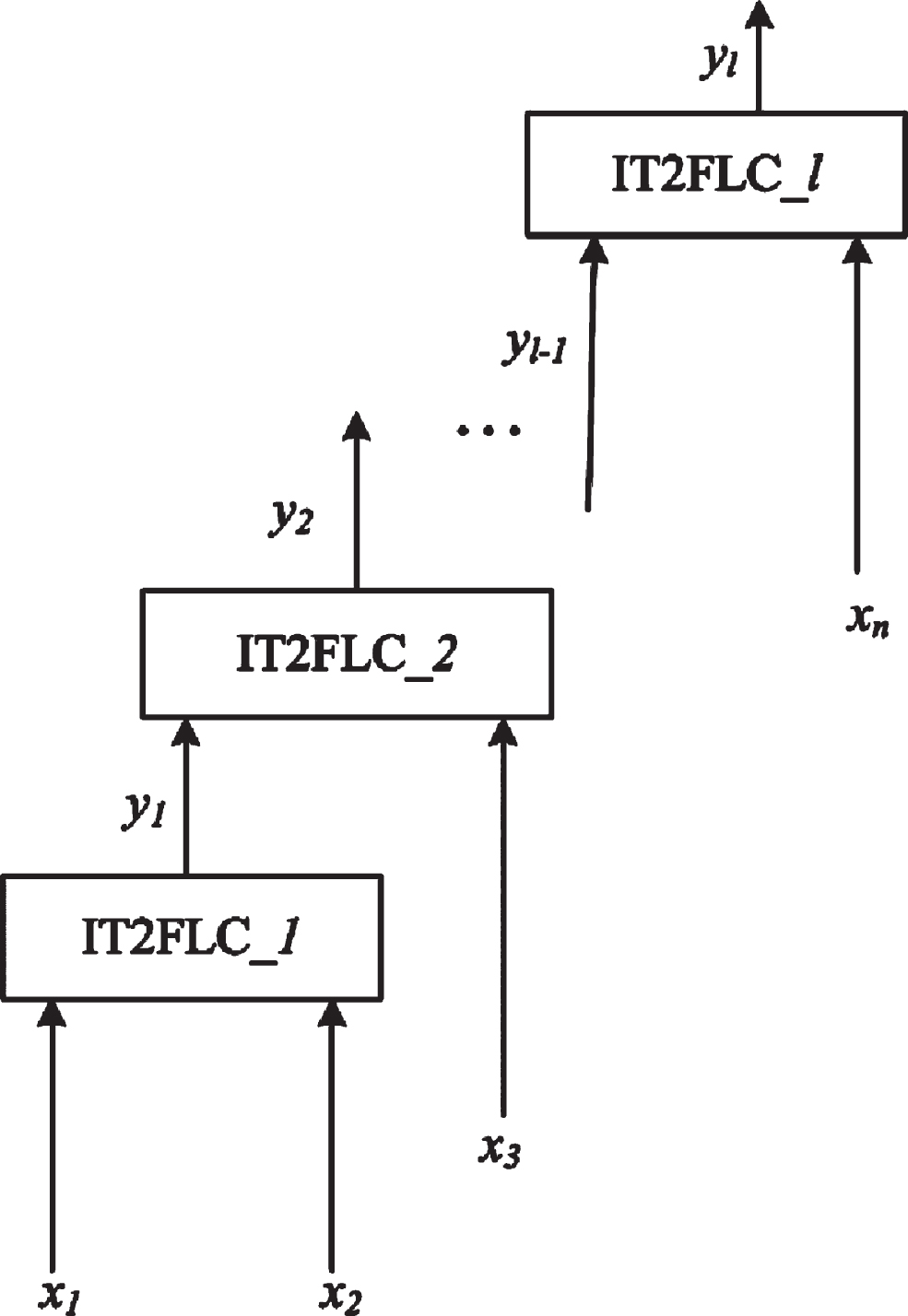
. With the increase of input variables, the number of fuzzy rules increases exponentially, which leads to rule explosion. And hierarchical fuzzy system can solve this problem. Hierarchical structure can refer to Lixin Wang[41], as shown in the Fig. 3. The first layer has n1 input variables, and y1 is output variable. The second layer has n2 + 1 input variables, …, layer i has n
i
+ 1 input variable. Until i = l satisfies
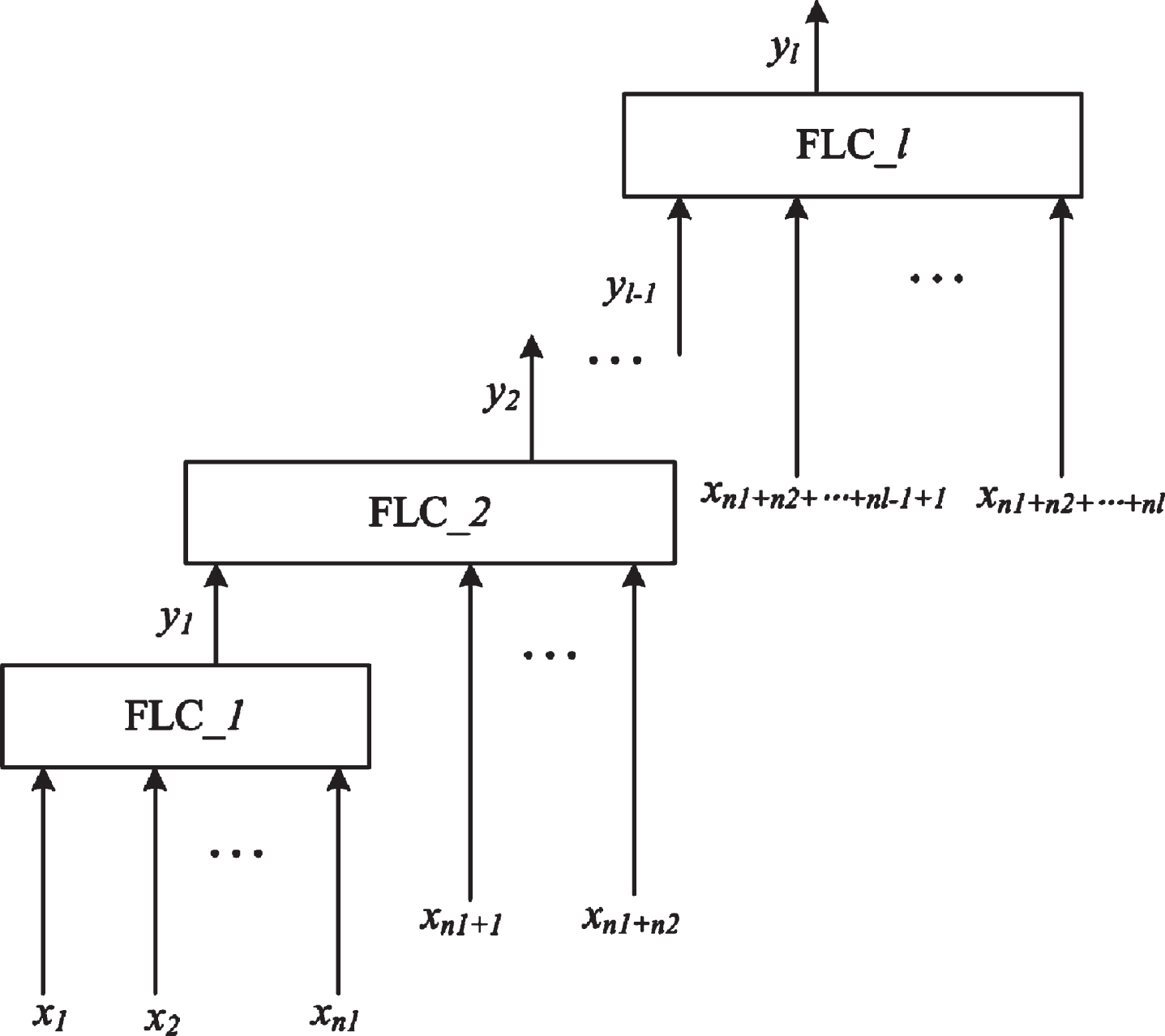
Hierarchical fuzzy structure.
The type-2 fuzzy set is to fuzzify the membership value of input variables again, and use the type-1 fuzzy set to express the membership value. Then, using type-2 fuzzy sets instead of type-1 fuzzy sets can enhance the ability of describing and dealing with uncertainties in fuzzy systems. The fuzzy system with type-2 fuzzy sets in the membership function of the antecedents or the consequent is a type-2 fuzzy system, whose structure is shown in the Fig. 4.
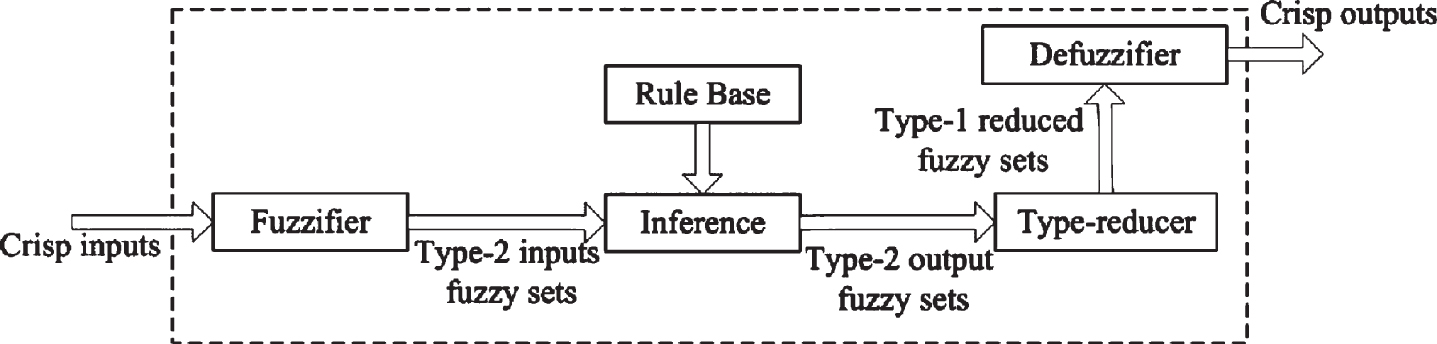
Type-2 fuzzy system.
The biggest difference between a type-2 fuzzy system and a type-1 fuzzy system is that there is a type-reduction link before the defuzzification. And type-reduction can transform a type-2 fuzzy set into a type-1 set, then carry out the defuzzification operation. The type-2 fuzzy sets are divided into interval type-2 fuzzy sets and generalized type-2 fuzzy sets. In this paper, interval type-2 fuzzy sets are used [42], and their secondary grade values are all taken as one, which can simplify calculation of the sets. And we don’t have to worry about choosing the secondary membership function.
Hierarchical type-2 fuzzy system is a combination of an additional hierarchical structure and interval type-2 fuzzy system. The combination method is shown in the Fig. 5. The interval type-2 fuzzy is used for each layer in the additional hierarchical structure system.
Next, we will introduce in detail how to plan the path of mobile robots using hierarchical type-2 fuzzy method.
Additional Hierarchical type-2 fuzzy system.
Firstly, the input variables, output variables and intermediate variables of the hierarchical type-2 fuzzy path planning system are determined. In the path planning of mobile robot, there are many parameters that can be selected as input of the fuzzy controller. This paper chooses the parameters shown in the Fig. 6. The distance Drobot-obstacle from the robot to the detected obstacle and the angle Θtarget-robot-obstacle between the target and the detected obstacle are selected as the input of the first level interval type-2 fuzzy system, and the turning angle Θ change of the robot is obtained as output. The output of the first level fuzzy system and the distance Drobot-obstacle from the robot to the detected obstacle are used as the input of the second level interval type-2 fuzzy system, and the forward step L step of the robot is obtained as the output. The hierarchical interval type-2 fuzzy structure of mobile robot path planning is shown in the Fig. 7.
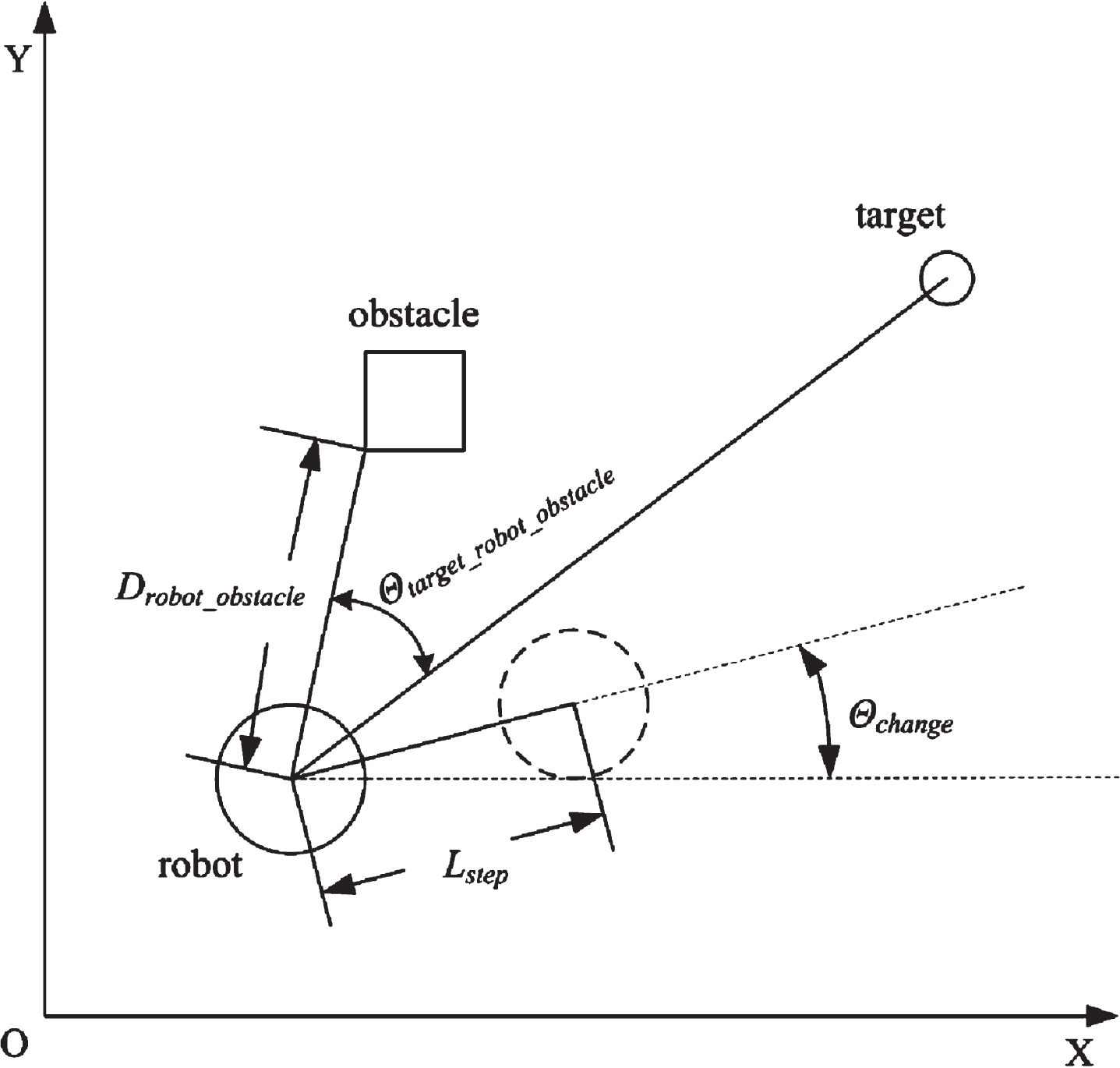
Robot Input Parameters.
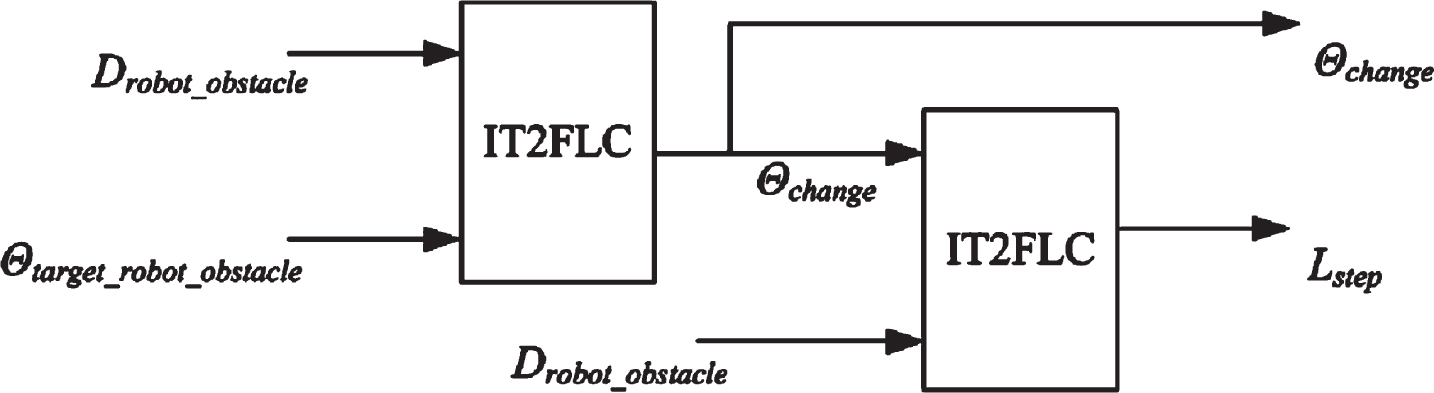
Hierarchical interval type-2 fuzzy structure of mobile robot path planning.
Then language variables of input and output variables are designed. Distance Drobot-obstacle is divided into five linguistic variables in the domain of [0, 5]: very-near(VN), small-near(SN), near(N), small-far(SF) and very-far(VF). Angle Θtarget-robot-obstacle and Θ change are also divided into five linguistic variables in the domain of [-90, 90]: left-big(LB), left-small(LS), zero(Z), right-small(RS) and right-big(RB). step L step is described by five linguistic variables in the domain of [0, 2], which are small(S), less-small(LS), medium(M), less-big(LB) and big(B). Each linguistic variable is represented by interval type-2 fuzzy sets. In addition, the upper and lower membership functions of interval type-2 fuzzy sets are chosen as triangular membership functions. The specific form of membership function is optimized by genetic algorithm, which will be shown in the next part.
Finally, according to the experience, the fuzzy rules are obtained. The rules of each layer are as Tables 1 and 2.
Fuzzy rules at the first level
Fuzzy rules at the second level
Fuzzy planner usually gets membership function to express language variable according to experience, but it may not be optimal for path planning. In order to optimize the path, genetic algorithm is used to optimize the membership function in the planner. Genetic algorithm is a kind of global search parallel optimization algorithm commonly used in fuzzy controller. It simulates the evolution of the survival of the fittest in nature. The search space composed of the solution of the problem is mapped to the genetic space, and the possible solution is encoded into a vector, which is called chromosome, and each element in the vector is called gene. By continuously calculating the fitness value of each chromosome, selection, crossover, mutation, and finally selecting the chromosome with the best fitness value, the optimal solution is obtained.
As there is a mature genetic algorithm toolbox in MATLAB, we can directly use the toolbox to complete the parameters optimization of this paper.When using toolbox, there are many options to be specified, such as fitness function, number of variables, upper and lower bound constraints, population size, selection method, mutation method, crossover method, stopping criteria, etc. Some of these options can take default values, but fitness functions and the number of variables are required. Next, the fitness function and its independent variables are explained in detail.
First, the independent variables (i.e. parameters to be optimized) in the fitness function are determined. Refer to [43], as shown in Fig. 9, take the peak position a and the left and right width b, c, d, e of the upper and lower membership functions of the interval type-2 triangular membership function as the parameters to be optimized. And there are 68 parameters need to be optimized. In order to make the optimization result more effective, the optimization range of each parameter is near the empirical value.
Next, define the fitness function. Using the idea of [12], we can optimize the membership function of each variable in the proposed hierarchical interval type-2 fuzzy path planner. What’s more, a map with unknown obstacle coordinates is needed as shown in the Fig. 8. And the start and end points need to be determined at the same time. Then, define the fitness function according to the optimization requirements as follows:
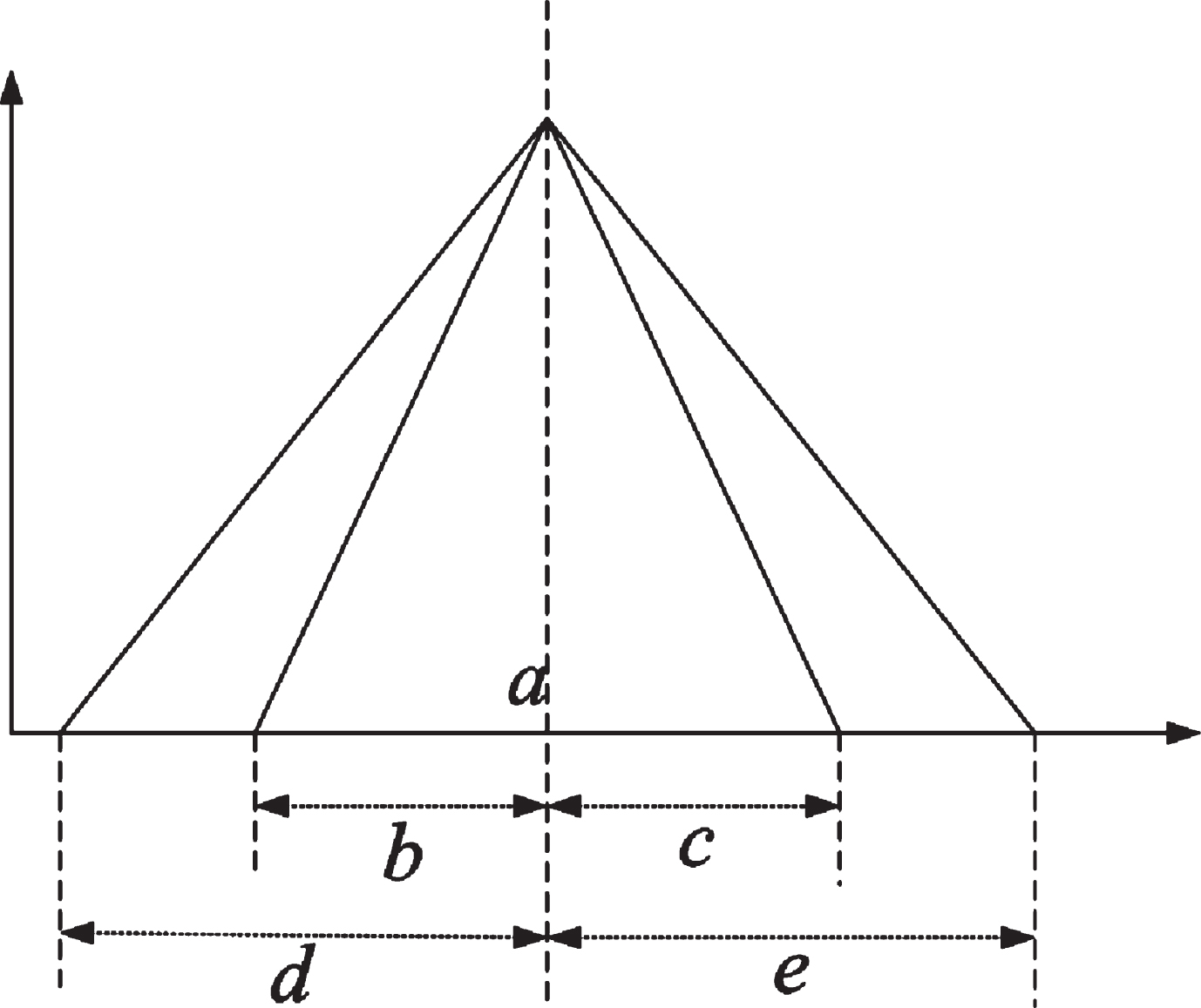
Optimization parameters of triangular membership function.

Map with unknown obstacles.
Finally, the optimized membership function results are as follows. Fig. 10 is the optimization result of membership function of Drobot-obstacle, the optimization result of membership function of Θtarget-robot-obstacle is shown in Fig. 11, and Fig. 12 is the optimization result of Θ change . As shown in the figures, the solid line represents the upper membership function, and the dotted line represents the lower membership function. Similarly, the language variables represented by each are marked. It can also be seen from Fig. 10 and Fig. 11 that the positions of language variables SF and RS are not as designed at the beginning. To some extent, it reflects and solves the inaccuracy of fuzzy rules determined by experience.
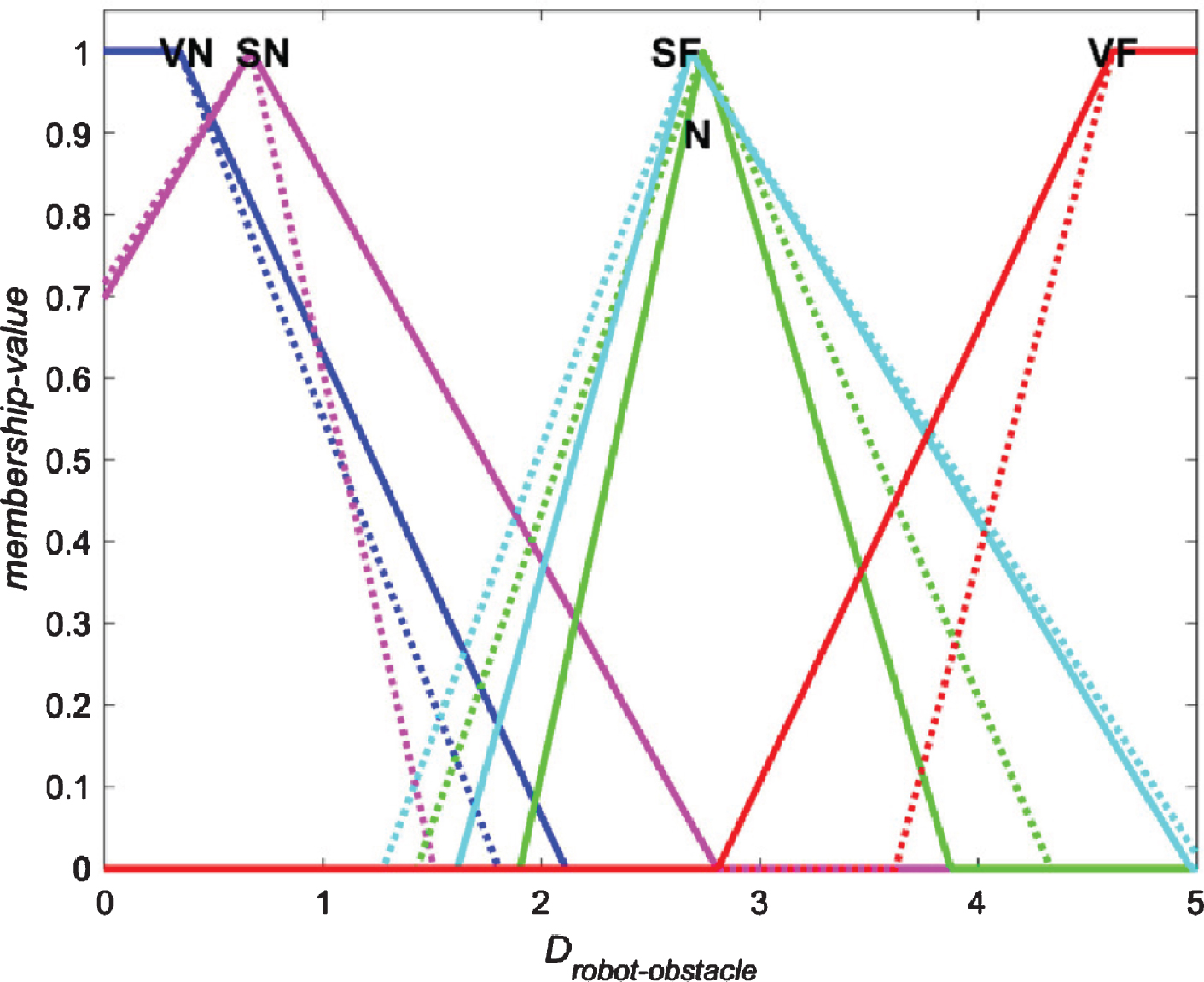
Optimization result of membership function of Drobot-obstacle.

Optimization result of membership function of Θtarget-robot-obstacle.
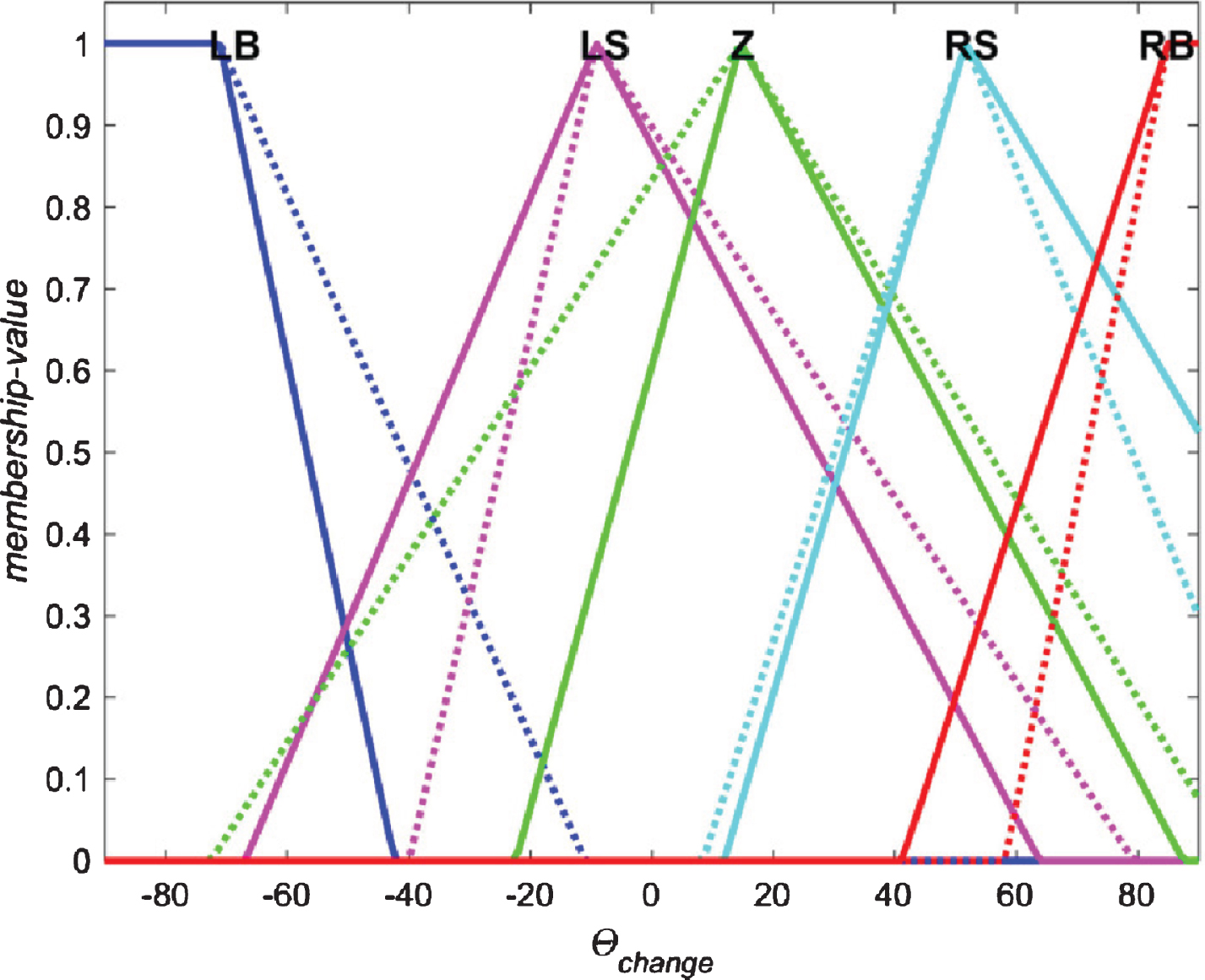
Optimization result of membership function of Θ change .
The path planning process is shown in Fig. 17. When using genetic toolbox to optimize parameters, we need to define some relevant options and fitness functions. The independent variable of fitness function is the parameter of triangular membership function which needs to be optimized previously, and the dependent variable of fitness function is the fitness value. According to the defined fitness function, the first step to calculate the fitness value is to get the value of planned path length L, distance d between the robot and the target at the end of planning, and penalty S in the process of path planning. Then the fitness value can be obtained by simple operation. Finally, the following pseudo code gives a more specific description and explanation. The detection function is used to detect whether there is an obstacle in the specified direction. If an obstacle is detected in this direction, return the distance of the obstacle and the angle between the obstacle and the target. If no obstacle is detected, the detection radius is returned as the distance and the angle is returned to zero. The hierarchical interval type-2 fuzzy path planner is written as a function according to the previous settings. The function inputs are Drobot-obstacle, Θtarget-robot-obstacle and the optimized parameters of each triangle membership function. In the function, the process of fuzzification and fuzzy reasoning is carried out, then the Θ change and L step are obtained as the function outputs.
In this part, the effectiveness of the proposed method is verified by MATLAB simulation. At first, the effectiveness of genetic optimization is verified, then the comparative test shows that the proposed method has more advantages than other methods.
1: Give map with unknown obstacle;
2: Set start point, target;
3: Draw map and robot at the start point;
4: Set detection radius of detection function;
5: Calculate the distance d and angle (0° direction of detection) from the robot to the target;
6: Set the minimum distance d min when the robot reaches the target;
7: Set the quantization and proportion factor of fuzzy controller;
8: Use genetic algorithm toolbox to optimize the parameters of membership function in fuzzy controller;
9:
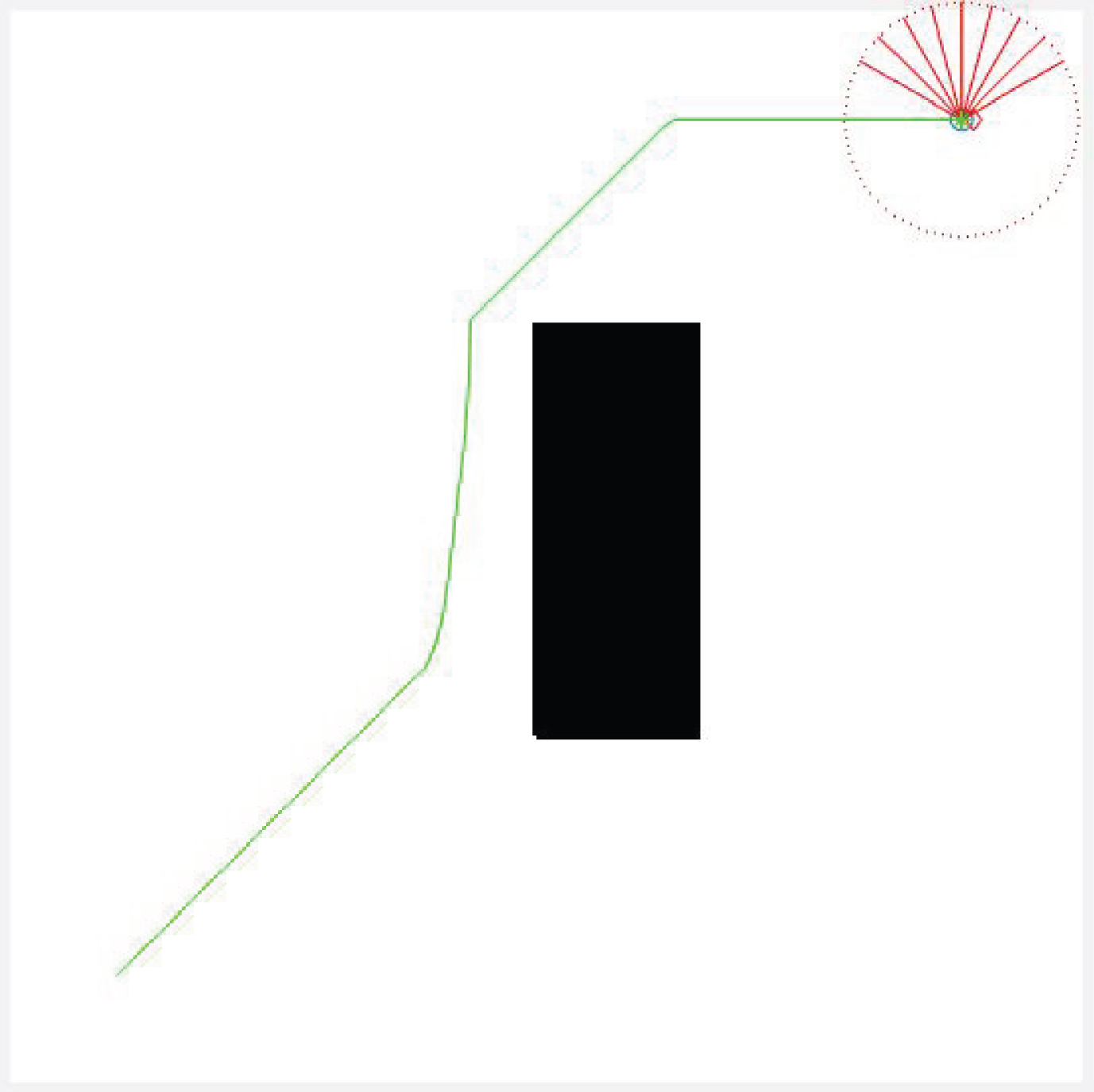
10: Use the detection function to detect the target direction (0°) and its ±15°, ±30°, ±45°, ±60° directions, the distances and corresponding angles in nine directions are obtained;
11: Obtain the minimum distance Drobot-obstacle and its corresponding angle Θtarget-robot-obstacle by comparison, then multiply the quantization factor;
12: Input the Drobot-obstacle and Θtarget-robot-obstacle to the hierarchical interval type-2 fuzzy path planner (membership function is optimized by genetic algorithm), and get the turning angle Θ change and the forward step L step , then multiply the proportion factor;
13: Update robot coordinates using Θ change and L step ;
14: Calculate the distance d and angle(0° direction of detection) from the robot to the target;
15: Draw the robot and its path on the map.
16:
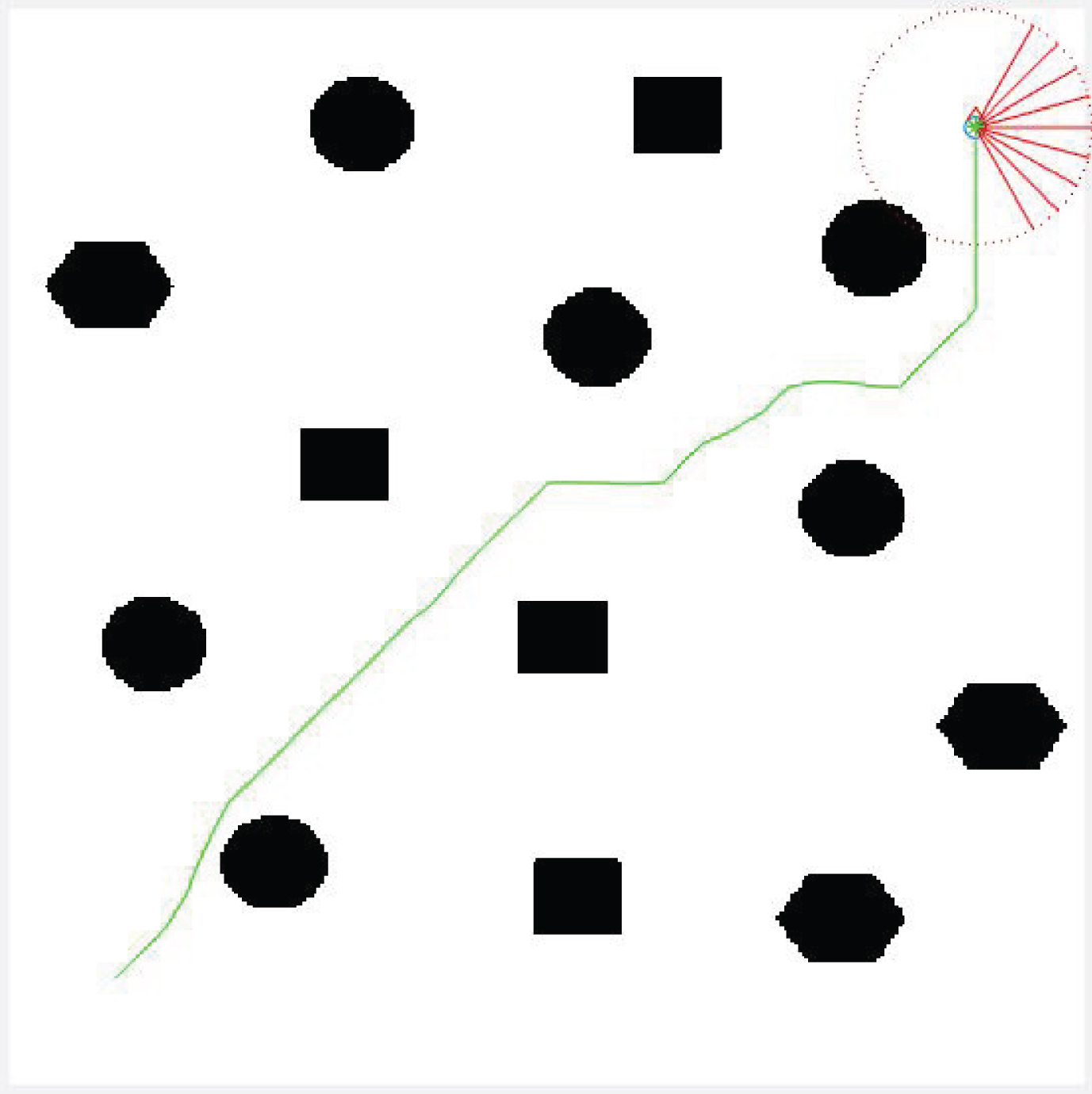
Firstly, the effectiveness of genetic optimization is verified by simulation experiments. In the map shown in Fig. 8, two algorithms of hierarchical interval type-2 fuzzy and hierarchical interval type-2 fuzzy with genetic optimization are used respectively, and the planned paths are also shown in Fig. 15 and Fig. 16 respectively. It can be seen from the Fig. 15 that, although the non-optimized algorithm can successfully avoid obstacles to reach the end point, the path is very close when passing through obstacles, which is dangerous. Nevertheless, the path obtained by the optimized algorithm planning is farther away from the obstacles and safer. After calculation, the total length of the optimized path is shorter than that of the non-optimized path, although the difference is not great. We can reasonably guess that if the map is larger, the optimized path length will be shorter obviously. Drawing shows the change curve of Θ change and L step in the process of path planning. Fig. 20 is the change curve obtained by the non-optimized hierarchical interval type-2 fuzzy path planner, and Fig. 21 is obtained by the genetic optimized hierarchical interval type-2 fuzzy path planner. It can be seen from the figure that the Θ change and L step change more smoothly after optimization, and change better than those without optimization.
Secondly, the advantages of the hierarchical interval type-2 fuzzy path planning method with genetic optimization proposed in this paper is simply verified. In the same map, the path planning is carried out by using the type-1 fuzzy, hierarchical type-1 fuzzy, interval type-2 fuzzy, hierarchical interval type-2 fuzzy respectively. Genetic algorithm is used to optimize the parameters of membership function of the four methods. In addition, except for the changes of path planning methods, other parameters are completely consistent. Of course, the way to get the path length value and other values when calculating the fitness value will also change with the path planning method. The path planning results of each method are shown in Fig. 13, Fig. 14, Fig. 18 and Fig. 19. Obviously, it can be seen from these figures that for the huge obstacles between the start point and target, the hierarchical interval type-2 fuzzy method with genetic optimization proposed in this paper can successfully avoid the obstacles. The membership functions of the other three methods are also optimized by genetic algorithm, but none of them can successfully overcome the obstacles. This shows that the hierarchical interval type-2 fuzzy path planning method has more advantages than the other three methods, and can adapt to more complex and extensive map situations.

Path planning flow chart.

Path planning results of hierarchical interval type-2 fuzzy.
Path planning results of hierarchical interval type-2 fuzzy with genetic optimization.
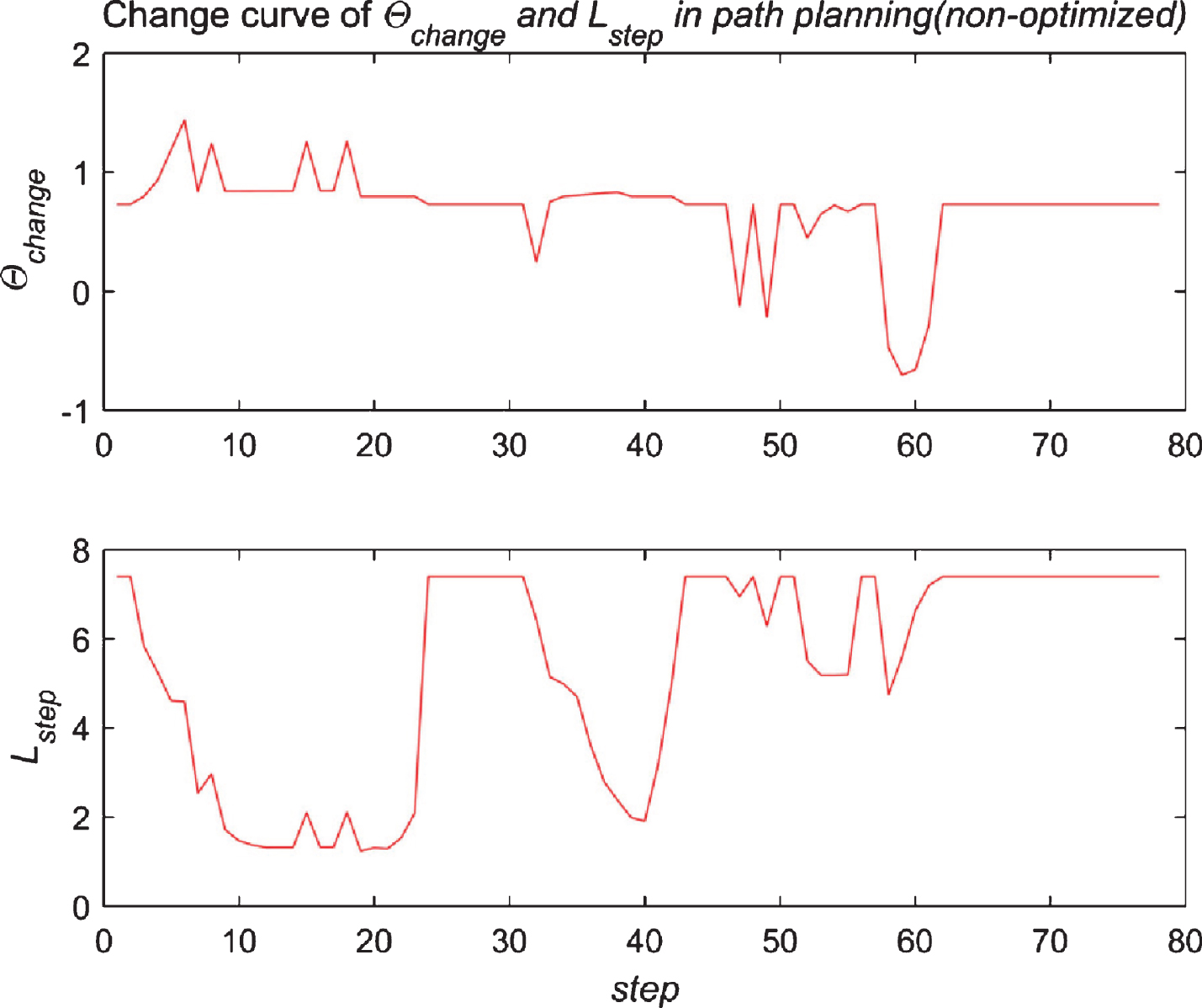
Change curve of Θ change and L step in the process of path planning without optimization.

Change curve of Θ change and L step in the process of path planning with optimization.

Path planning results of type-1 fuzzy.

Path planning results of hierarchical type-1 fuzzy.

Path planning results of interval type-2 fuzzy.
Path planning results of hierarchical interval type-2 fuzzy.
In this paper, aiming at the path planning problem of mobile robot in the unknown environment, a hierarchical interval type-2 fuzzy method is proposed. The proposed method is more suitable for systems with high complexity and uncertainty. For the simple mobile robot system and the simple obstacles in the unknown environment, the common fuzzy method can also effectively plan the path. But if the mobile robot system becomes more complex and the obstacles in the unknown environment become more diverse, many methods lose its effectiveness. When the robot system is more complex, the hierarchical structure can simplify the system, increase the understanding of the system, more easily get the fuzzy rules, and make the rule coverage more extensive and complete. For the multi input complex fuzzy system, hierarchical fuzzy structure can solve the rule explosion problem. For the more complex unknown environment, there are more uncertainties. The type-2 fuzzy is more flexible than the type-1 fuzzy, which can effectively deal with these uncertainties and plan better paths. Combined with the advantages of hierarchical structure and type-2 fuzzy, the method of hierarchical interval type-2 fuzzy can solve some problems that can’t be dealt with by individual methods. The simulation results show that the hierarchical interval type-2 fuzzy method can effectively plan the path of mobile robot in the unknown environment. In order to make the effect of path planning better, genetic algorithm is used to optimize the membership function of each variable. Simulation results show that the optimized path is better than the non-optimized path.
There are still some deficiencies in the research. For example, a mobile robot should have multiple sensors to detect the surrounding environment information, but the path planner only considers the distance of the nearest obstacle and its related angle. If the information from other sensors can be considered, the path planning should be more effective. Hierarchical fuzzy and type-2 fuzzy are both big research fields. If we study them deeply, there are many details need to be explored. This paper only proposed this method and simply verified its effectiveness, and did not explore other content in depth.
Footnotes
Acknowledgments
This work is supported by the National Key R&D Program of China (2018YFB1307401), Chengdu technological innovation R & D project (2019-YF05-00958-SN) and Key R & D project in Sichuan Province, China (2020YFG0115).