This paper proposes three methods to estimate the parameters in uncertain differential equations (UDEs) based on discrete observation data. The first method is designed for a class of UDEs in which their solutions have the explicit expressions of uncertainty distribution. The second method is given to solve the estimation problem through the inverse uncertainty distribution. In the third method, the unknown parameters of UDEs are estimated by the solution of the corresponding α-path. These methods are interpreted to be efficient and practical by using a popular UDE with exponential solutions and obtaining the detailed estimators of the parameters.
The concept of uncertain differential equation (UDE) was first proposed by Liu [1]. Chen and Liu [2] obtained the analytic solution of a linear UDE. The solution problem of UDEs was also studied by Liu [3], Yao [4], Liu [5], Wang [6], Yao and Chen [7], and Zhou and Li [8]. More details of UDEs refer to Gao [9], Liu [10], and Yao et al. [11].
In the past few years, uncertain differential equations were widely used to model dynamic uncertain systems that are subject to uncertain fluctuations, such as finance. For example, Liu [10] proposed an uncertain stock model by uncertain differential equation and derived its European option price formulas. Chen and Gao [12] introduced an uncertain interest rate model. Chen [13] obtained the American option pricing formula for uncertain financial market. Yao [14] discussed an application in stock model with floating interest rate, and Liu [15] studied uncertain currency model. Moreover, uncertain differential equation has also been introduced to study optimal control, see Zhu ([16], [17]). Recently, Li et al. [18] firstly applied uncertain differential equation to the domain of infectious diseases, and established an uncertain SIS epidemic model. Fang et al. [19] obtained the solution and α-path of uncertain SIS model with standard incidence and demography. Li et al. [20] compared with deterministic, stochastic and uncertain SIS epidemic models, and revealed the relationship among them. Up to now, uncertain differential equations are becoming increasingly important due to the application for modelling uncertain phenomena in different fields.
Since there always exist some unknown parameters in UDEs, it is key to obtain the estimated values of unknown parameters in order to investigate the properties of UDEs. Li [21] used the least-square method to estimate unknown parameters of a class of simple UDEs as follows
where αl (l = 0, 1, …, p), β (≠0) are unknown parameters, and Ct is an uncertain process. However, the estimation problem of unknown parameters for other uncertain differential equations is seldom studied. In this paper, we propose three approaches to estimate the unknown parameters in general UDEs.
The rest is arranged as follows. In Sect. 2, we review some basic definitions of uncertain differential equation. Three methods are proposed to estimate unknown parameters of UDEs under different conditions in Sect. 3. Based on the proposed methods, we obtain the formulas of the estimated parameters for UDEs with exponential solutions in Sect. 4, and conclusions are given in Sect. 5.
Definitions
Let be a σ-algebra on a non-empty set Γ. Every element is called an event.
Definition 1. [22] A set function : is called an uncertain measure if it is supposed to satisfy four axioms:
Axiom 1 (Normality Axiom) for the universal set Γ.
Axiom 2 (Duality Axiom) for any event Λ.
Axiom 3 (Subadditivity Axiom) For every countable sequence of events Λ1, Λ2, . . . ,
The triplet is called an uncertainty space.
Axiom 4 (Product Axiom) Let be uncertainty spaces and Λi be arbitrarily chosen events from for i = 1, 2, . . . , then the product uncertain measure is an uncertain measure satisfying
Definition 2. [22] An uncertain variable ξ is a measurable function from uncertainty space to the set of real numbers ; that is, for any Borel set B of , the set {ξ ∈ B} = {γ ∈ Γ|ξ (γ) ∈ B} is an event.
Definition 3. [22] For any real number , uncertainty distribution Φ of uncertain variable ξ is defined by .
Definition 4. [23] An uncertainty distribution Φ (x) is said to be regular if it is a continuous and strictly increasing function with respect to x at which 0 < Φ (x) <1, and
Definition 5. [23] Let ξ be an uncertain variable with regular uncertainty distribution Φ (x). Then, the inverse function Φ-1 (α) is called inverse uncertainty distribution of ξ.
An uncertain variable ξ is said to be normal if it has uncertainty distribution
denoted by , where e and σ are real numbers with σ > 0. Especially, if e = 0 and σ = 1, ξ is called standard normal, denoted by .
Definition 6. [1] Let T be an index set, and be an uncertainty space. An uncertain process Xt is a measurable function from to the set of real numbers, i.e., for each t ∈ T and any Borel set B of real numbers, the set {Xt ∈ B} = {γ|Xt (γ) ∈ B} is an event.
Definition 7. [24] An uncertain process Xt is said to have an uncertainty distribution Φt (x), if the uncertain variable Xt has the uncertainty distribution t (x) at any time t.
Definition 8. [10] An uncertain process Ct is said to be Liu process, if
(i) C0 = 0 and almost all sample paths are Lipschitz continuous.
(ii) Ct has stationary and independent increments.
(iii) Every increment Ct+s - Cs is a normal uncertain variable with an uncertainty distribution
Definition 9. [10] Let Xt be an uncertain process and Ct be Liu process. For any partition of closed interval [a, b] with a = t1 < t2 < ⋯ < tk+1 = b, the mesh is written as . Then, Liu integral of Xt is defined by
provided that the limit exists almost surely and is finite.
Definition 10. [1] Let f and g be two given functions. Then
is called an uncertain differential equation (UDE). An uncertain process Xt is called a solution of UDE (1), if Xt satisfies the UDE (1) for any time t.
The uncertain differential equation (1) is equivalent to the uncertain integral equation
Definition 11. [7] Let α be a number with 0 < α < 1. An uncertain differential equation (1) is said to have an α-path if it solves the corresponding ordinary differential equation
where Φ-1 (α) is the inverse standard normal uncertainty distribution, that is
Estimation methods
Estimation based on uncertainty distribution
Consider an uncertain differential equation as follows
where a and b are two unknown parameters. For the equation (3), we introduce a method based on uncertainty distribution to estimate the unknown parameters, denoted by Method I. The process of this method is formed by the following steps.
Step 1. Calculate the analytic solution Xt of UDE (3), denoted by Xt = S1 (t, Ct).
Step 2. Let ΨXt (x, t ; a, b) be uncertainty distribution of the solution Xt at any time t. By Definitions 3 and 7, we have for and t > 0. By Definition 8, . If the expression of ΨXt (x, t ; a, b) can be obtained, we denote it as F (x, t ; a, b), that is, ΨXt (x, t ; a, b) = F (x, t ; a, b) .
Step 3. Let ΨXt (xi, tj) be the observations of ΨXt (x, t ; a, b) for i = 1, 2, …, n and j = 1, 2, …, m. Define the error
which is the deviation of the observed value from the true value of ΨXt (x, t ; a, b).
Step 4. By the least-square method, the values and of a and b need to satisfy
The solutions and are called the least-square estimators based on uncertainty distribution ΨXt (x, t ; a, b), denoted by UD-LS estimators and for short.
Estimation based on inverse uncertainty distribution
Suppose that the solution Xt of UDE (3) has uncertainty distribution ΨXt (x, t ; a, b) at any time t. If ΨXt (x, t ; a, b) is regular, by Definition 5, then its inverse function is the inverse uncertainty distribution of Xt. Based on the expression of , we introduce a method to estimate two unknown parameters a and b, called Method II. The method includes the processes below.
Step 1. The first step is similar to that of Method I. The analytic solution Xt of UDE (3) is denoted by Xt = S1 (t, Ct).
Step 2. From Definitions 3 and 7, we have
for and t > 0. Suppose the uncertainty distribution ΨXt (x, t ; a, b) is regular. If the inverse uncertainty distribution can be obtained, we denote it as G (α, t ; a, b).
Step 3. Let be the observations of a, b) for i = 1, 2, …, n and j = 1, 2, …, n. Define the error
which is the deviation of the observed value from the true value of .
Step 4. By the least-square method, the solutions of
are called the least-square estimators based on inverse uncertainty distribution, denoted as IUD-LS estimators a′ and b′.
Estimation based on α-path
Next, we introduce the third method based on α-path to estimate unknown parameters of a type of UDEs when their uncertainty distributions, or inverse uncertainty distributions are too difficult to solve. The method based on α-path of UDE is called Method III. The process is divided into four steps.
Step 1. By Definition 11 of α-path, an α-path of UDE (3) is given by an ordinary differential equation
where Φ-1 (α) is defined in (2) for α ∈ (0, 1).
Step 2. Calculate the solution of (3), denoted by for 0 < α < 1.
Step 3. Let be observations from S2 (t, α ; a, b) for i = 1, 2, …, n, j = 1, 2, …, m and αi ∈ (0, 1). In order to approximately solve , define the error
which is the deviation of the observed value from the true value of S2 (t, α ; a, b).
Step 4. By the least-square method, the estimated values satisfy
which are called the least-square estimators based on α-path , denoted as α-path LS estimators and .
Parameter estimation of UDEs with exponential solutions
In order to illustrate our proposed estimation methods, we consider a UDE with exponential solutions
with X0 = x0 (>0), where a and b are unknown non-zero parameters. From Definition 10, the solution of the UDE is an uncertain process
It can be seen that Xt > 0 for any t > 0.
Theorem 1.Let ΨXt (x, t ; a, b) be the uncertainty distribution of the uncertain process (6). For any x > 0 and t > 0, we have
Proof. By Definitions 3 and 7 of uncertainty distribution, for any x > 0, we have
(i) If b > 0, by Definition 8, then
(ii) If b < 0, then
Corollary 1.The uncertainty distribution ΨXt (x, t ; a, b) of the uncertain process Xt is regular at each time t.
Proof. For each time t, we have
because of Xt > 0 for any time t. From Theorem 1,
Thus, by Definition 4, the uncertainty distribution ΨXt (x, t) is regular. □
Corollary 2.Both uncertain processes Xt = x0 exp(at + bCt) and Yt = x0 exp(at - bCt) have the same uncertainty distribution.
Let yi = (yi1, yi2, …, yim), ti = (ti1, ti2, …, tim), ui = (ui1, ui2, …, uim) and ɛi = (ɛi1, ɛi2, …, ɛim) for i = 1, 2, …, n. Denote
and θ = (θ1, θ2) T, where the superscript T represents transpose of a vector or matrix. Based on the expressions of Y, U, ɛ and θ, we establish a model
for i = 1, 2, …, n and j = 1, 2, …, m, where θi (i = 1, 2) are unknown parameters, and ɛij are mutually independent residual terms. In matrix form,
Suppose the inverse matrix (UTU) -1 exists. The least-squares method is used to estimate the unknown parameters of the model (9).
Lemma 1.Let be the least-square estimator of θ in the model (9). Then,
Proof. For the model (9), the least-square function is
In order to minimize Q, we have
Let . The least-square estimator is
Method I
Without loss of generality, suppose b > 0 in (6) based on Corollary 2. Thus, by Theorem 1, we have
Let ΨXt (xi, tj) be observations of uncertainty distribution ΨXt (x, t ; a, b) for i = 1, 2, …, n and j = 1, 2, …, m. Define the error
It follows that the optimization problem is
where the unknown parameters a and b are the solution of the minimization of problem. By solving the optimization problem (10), it is to obtain the following result.
Theorem 2.For UDE (5), the UD-LS estimators of parameters a and b arewhere for i = 1, 2, …, n and j = 1, 2, …, m.
Proof. For (8), let
and tij = 1 for i = 1, 2, …, n ; j = 1, 2, …, m, and . Thus, the optimization problem (10) is written by
By Lemma 1, we can obtain the UD-LS estimators and of a and b. □
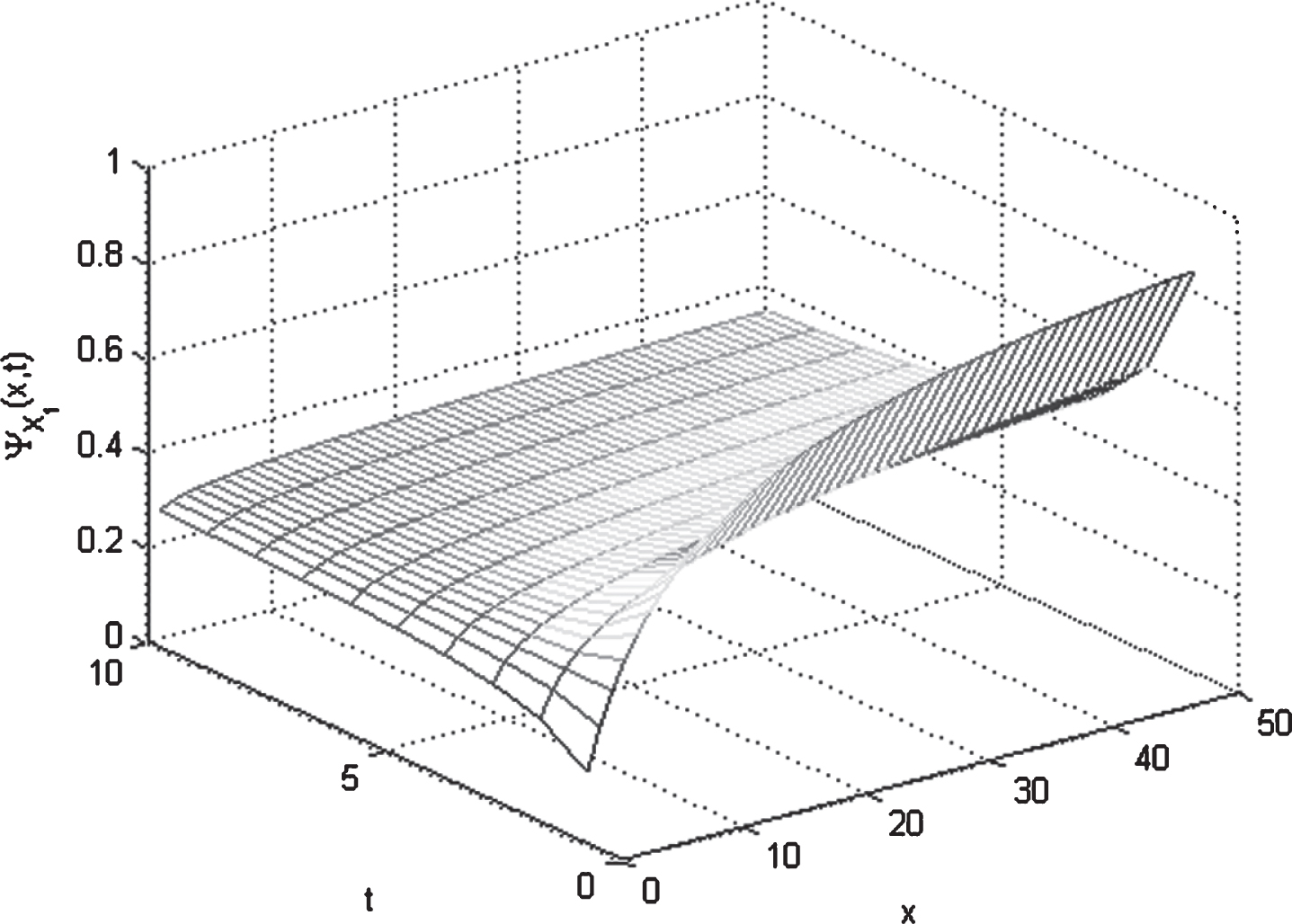
The curve of uncertainty distribution ΨXt (x, t) with x0 = 3, a = 1 and b = 2.
Example 1. Take x0 = 3, a = 1 and b = 2 in UDE (5). By Theorem 1, the uncertainty distribution ΨXt (x, t) of the solution Xt is
for x > 0 and t > 0 . Figure 1 provides the trajectory of ΨXt (x, t).
Through the grid intersections of ΨXt (x, t) in Figure 1, we get 500 observations ΨXt (xi, tj), where xi = i and tj = j for i = 1, 2, …, 50 and j = 1, 2, …, 10. Clearly, n = 50 and m = 10. Since
by Theorem 2, we get the UD-LS estimators of a and b as follows
Method II
Through Theorem 1, Corollaries 1 and 2, the inverse uncertainty distribution of UDE (5) is
for α ∈ (0, 1) and t > 0. The equation is equivalent to
for 0 < α < 1 and t > 0 .
Let be observations of for i = 1, 2, …, n and j = 1, 2, …, m. Define the error
where Φ-1 (α) is defined in (2). By least-square method, we need to solve the optimization problem
Theorem 3.For UDE (5) with the initial value x0 (>0), the IUD-LS estimators a′ and b′ of parameters a and b arewhere for i = 1, 2, …, n and j = 1, 2, …, m.
Proof. In (8), take
and ɛij = γij, tij = tj for i = 1, 2, …, n and j = 1, 2, …, m, and θ = (a, b) T. Thus, the optimization problem (10) is formed by
Based on Lemma 1, the estimators a′ and b′ are easy to obtain. □
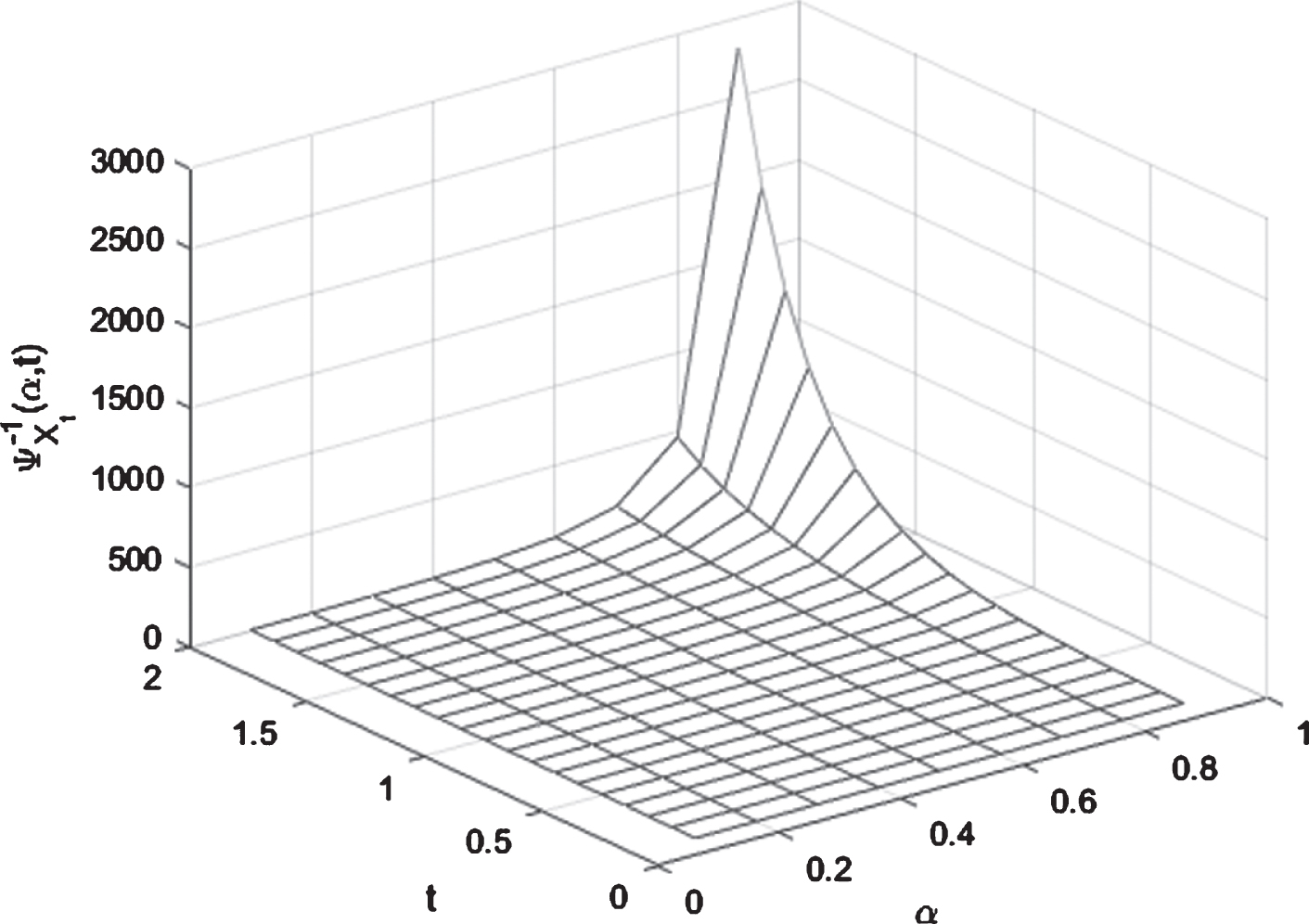
The curve of uncertainty distribution .
Example 2. Similar to Example 1, take x0 = 3, a = 1 and b = 2 in the UDE (5). The inverse uncertainty distribution is
Figure 2 shows the curve of uncertainty distribution for α ∈ (0, 1) and 0 < t ≤ 2.
Next we choose 180 observations from the grid intersections of uncertainty distribution in Figure 2 for α = 0.1, 0.2, …, 0.9 and t = 0.1, 0.2, …, 2. Obviously, n = 9 and m = 20. Since
and , by Theorem 3, it is easy to get the IUD-LS estimators of a and b
Method III
Consider the UDE (5) with the initial value x0 (>0). By (3) and Definition 11, we have
Without loss of generality, suppose b > 0. Thus, an α-path of the UDE is
for any α ∈ (0, 1), which is equivalent to the following equation
Let be observations of for i = 1, 2, …, n, j = 1, 2, …, m and αi ∈ (0, 1). Define the error
for i = 1, 2, …, n, j = 1, 2, …, m and αi ∈ (0, 1). In order to obtain the least-square estimators of a and b, we solve the optimization problem
Theorem 4.For UDE (5) with the initial value x0 (>0), the α-path LS estimators of parameters a and b arewhere and for i = 1, 2, …, n and j = 1, 2, …, m.
Proof. Similar to Theorem 4. In (8), take
and ɛij = εij, tij = tj for i = 1, 2, …, n and j = 1, 2, …, m, and θ = (a, b) T. Thus, the optimization problem (10) is formed by
From Lemma 1, the estimators and are directly obtained. □
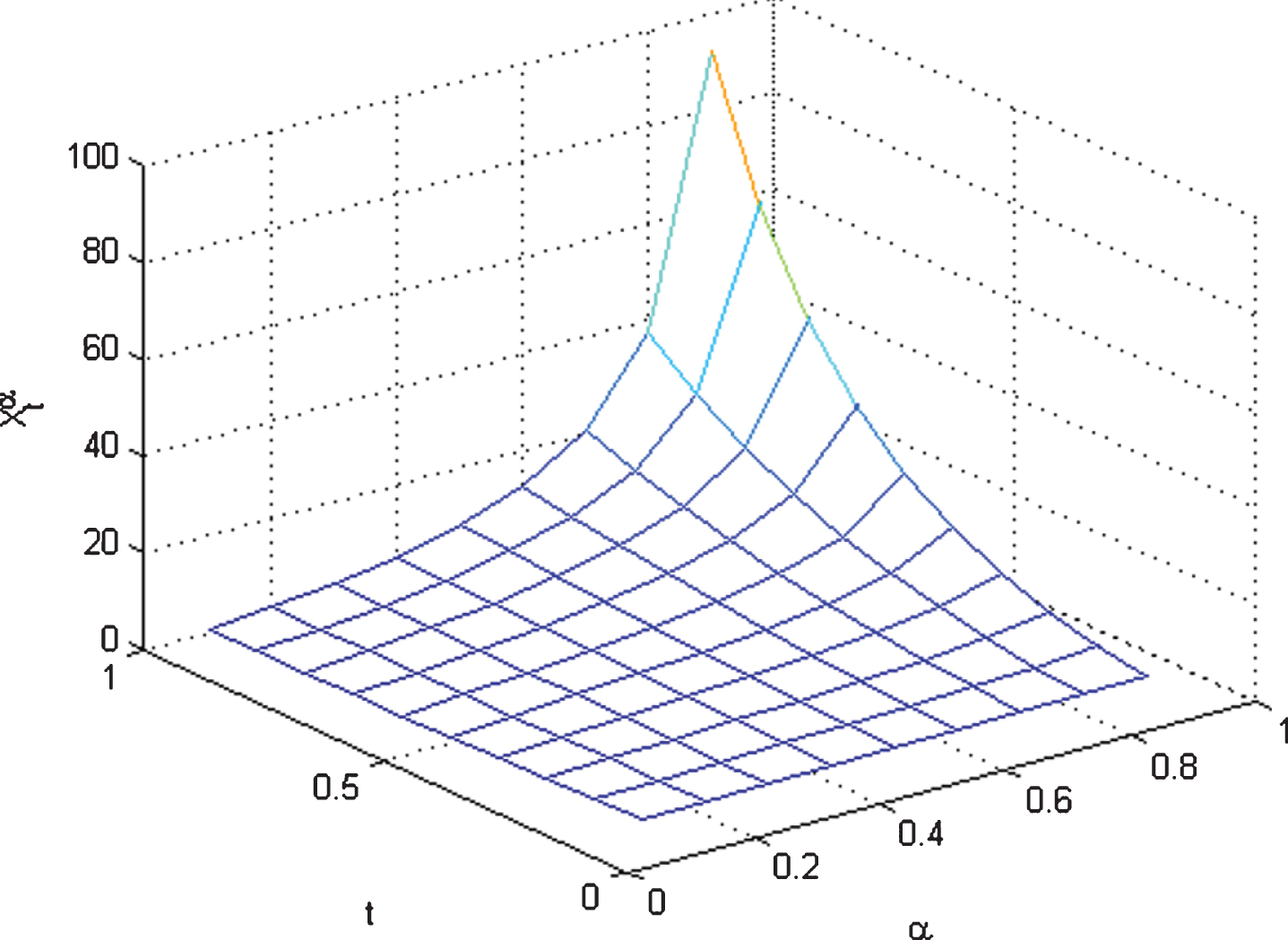
The curve of α-path with x0 = 3, a = 1 and b = 2.
Example 3. Similar to Example 1, for UDE (5), take x0 = 3 and a = 1 and b = 2. Thus, the α-path of the UDE is
Figure 3 shows the curve of α-path .
Next we estimate the parameters a and b of the UDE from the observations of , where i = 1, 2, …, n and j = 1, 2, …, m. Take αi = 0.1, 0.2, …, 0.9 and tj = 0.1, 0.2, …, 1. Obviously, n = 9 and m = 10. Thus, 90 observations are generated from the grid intersections of in Figure 3. By calculation, we have
and . Based on Theorem 4, we have α-path LS estimators of a and b
Examples 1-3 used Methods I, II and III to obtain UD-LS, IUD-LS and α-path LS estimators of a and b, respectively. Since all observations are from the true values of uncertainty distribution, inverse uncertainty distribution and α-path, the corresponding estimators are equal to the true values of a and b.
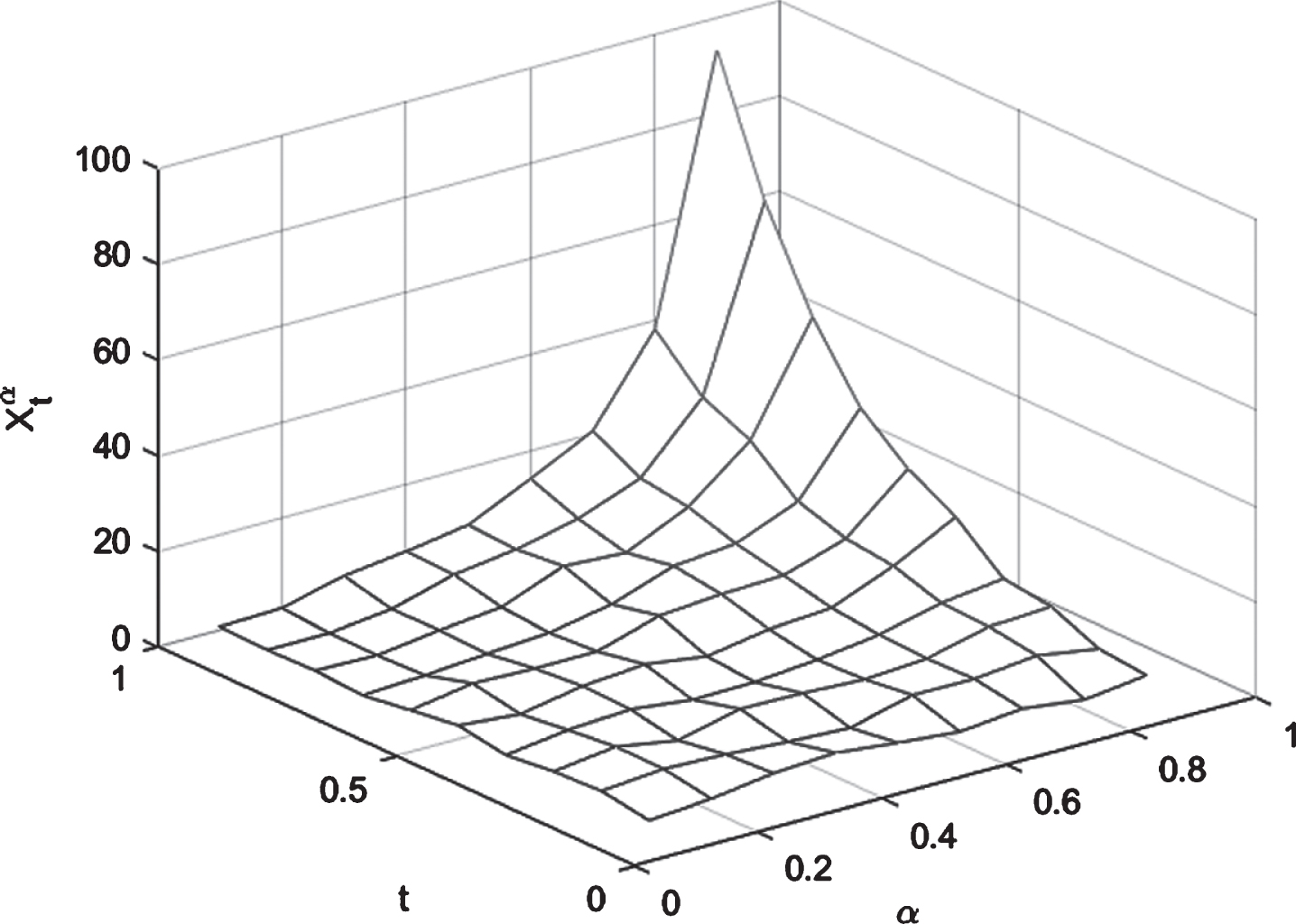
The curve of α-path with noise.
However, in practice, there often exist the errors between estimators and true values of unknown parameters because of observation noise. For instance, Figure 4 shows the curve of an α-path with noise, where x0 = 3. Similar to Example 3, we choose 90 observations of the α-path. From Theorem 4, α-path LS estimators of a and b are and
Furthermore, Methods I, II and III can be extended to estimate multiple unknown parameters of general UDE. Consider the following UDE
with the initial value X0 = x0, where a1, …, ap and b1, …, bq are (p + q) unknown parameters to be estimated. For convenience, let a = (a1, a2, …, ap) and b = (b1, b2, …, bq). Thus,
Similar to UDE with exponential solutions, we can obtain the corresponding results for estimating a and b.
Conclusions
The paper proposed three methods to estimate two unknown parameters a and b of UDE (3). Each method has its own advantage and shortage. Method I is based on the explicit uncertainty distribution of UDE’s solution. Method II is used to solve the estimation problem of UDEs by inverse uncertainty distribution. For Method III, the unknown parameters are estimated by α-path of UDE. In order to illustrate steps of Methods I, II and III, we estimate two unknown parameters a and b of the UDE dXt = aXtdt + bXtdCt and obtain the corresponding formulas of the estimated values. The numerical simulations reveal that these methods are efficient and practical under certain conditions.
Methods I-III have some limitations. If there are no explicit solutions of a UDE or its corresponding α-path, then we cannot use these method to solve the estimation problem by least-square method. Thus, some novelty methods need to offer a promising solution to overcome the problem, and should be considered in our further work.
Footnotes
Acknowledgments
This research is funded by the National Natural Science Foundation of China (Grant No. 11661076, 11671019) and LMEQF, and the Science and Technology Department of Xinjiang Uygur Autonomous Region (Grant No. 2018Q011).
References
1.
LiuB., Fuzzy process, hybird process and uncertain process, J Uncertain Syst2 (2008), 3–16.
2.
ChenX. and LiuB., Existence and uniqueness theorem for uncertain differential equations, Fuzzy Optim Decis Ma9(1) (2010), 69–81.
3.
LiuY.H., An analytic method for solving uncertain differential equations, J Uncertain Syst6(4) (2012), 244–249.
4.
YaoK., A type of uncertain differential equations with analytic solution, Journal of Uncertainty Analysis and Applications1 (2013), 1–8.
5.
LiuY., Semi-linear uncertain differential equation with its analytic solution, Information: An International Interdisciplinary Journal16(2) (2013), 889–894.
6.
WangZ., Analytic solution for a general type of uncertain differential equation, Information: An International Interdisciplinary Journal16(2) (2013), 1003–1010.
7.
YaoK. and ChenX.W., A numerical method for solving uncertain differential equations, J Intell Fuzzy Syst25(3) (2013), 825–832.
8.
ZhouC. and LiZ., Analytic solutions of two types of nonlinear uncertain differential equations, J Intell Fuzzy Syst35 (2018), 2413–2420.
9.
GaoY., Existence and uniqueness theorem on uncertain differential equations with local Lipschitz condition, J Uncertain Syst6(3) (2012), 223–232.
10.
LiuB., Some research problems in uncertainty theory, J Uncertain Syst3 (2009), 3–10.
11.
YaoK., KeH. and ShengY.H., Stability in mean for uncertain differential equation, Fuzzy Optim Decis Ma14(3) (2015), 365–379.
12.
ChenX. and GaoJ., Uncertain term structure model of interest rate, Soft Computing17(4) (2013), 597–604.
13.
ChenX., American option pricing formula for uncertain financial market, International Journal of Operations Research8(2) (2011), 32–37.
14.
YaoK., Uncertain contour process and its application in stock model with floating interest rate, Fuzzy Optim Decis Ma14 (2015), 399–424.
15.
LiuY.H., Uncertain currency model and currency option pricing, International Journal of Intelligent Systems30(1) (2015), 40–51.
16.
ZhuY.G., Uncertain optimal control with application to a portfolio selection model, Cybernetics and Systems41(7) (2010), 535–547.
17.
ZhuY.G., Functions of uncertain variables and uncertain programming, J Uncertain Syst6(4) (2012), 278–288.
18.
LiZ., ShengY., TengZ. and MiaoH., An uncertain differential equation for SIS epidemic model, J Intell Fuzzy Syst33 (2017), 2317–2327.
19.
FangJ., LiZ., YangF. and ZhouM., Solution and α-path of uncertain SIS epidemic model with standard incidence and demography, J Intell Fuzzy Syst35 (2018), 927–935.
20.
LiZ., TengZ., DuJ. and ShiX., Comparison of three SIS epidemic models: deterministic, stochastic and uncertain, J Intell Fuzzy Syst35 (2018), 5785–5796.