
Abstract
Adding spatial penalty to fuzzy C-means (FCM) model is an important way to reduce the influence of noise in image segmentation. However, these improved algorithms easily cause segmentation failures when the image has the characteristics of unequal cluster sizes. Besides, they often fall into local optimal solutions if the initial cluster centers are improper. This paper presents a noise robust hybrid algorithm for segmenting image with unequal cluster sizes based on chaotic crow search algorithm and improved fuzzy c-means to overcome the above defects. Firstly, each size of clusters is integrated into the objective function of noise detecting fuzzy c-means algorithm (NDFCM), which can reduces the contribution of larger clusters to objective function and then the new membership degree and cluster centers are deduced. Secondly, a new expression called compactness, representing the pixel distribution of each cluster, is introduced into the iteration process of clustering. Thirdly, we use two- paths to seek the optimal solutions in each step of iteration: one path is produced by the chaotic crow search algorithm and the other is originated by gradient method. Furthermore, the better solutions of the two-paths go to next generation until the end of the iteration. Finally, the experiments on the synthetic and non–destructive testing (NDT) images show that the proposed algorithm behaves well in noise robustness and segmentation performance.
Introduction
Image segmentation is an unsupervised learning task that aims at partitioning a digital image into multiple segments with similar characteristics, such as gray level, texture or color intensity [1–3]. Image segmentation is an important aspect of pattern recognition, computer vision and image understanding. Among many segmentation algorithms, clustering approaches, especially fuzzy c-means algorithm (FCM) has been widely used in different domains such as medical image, natural image, remote sensing image, and so on because of its simplicity and efficiency [4–7, 9–19].
FCM was proposed by Bezdek and based on the fuzzy theory [8], but it had previously been observed that the conventional FCM was sensitive to noise because of its ignorance about spatial information of each pixel. Several researchers had considered to incorporate local spatial information into the FCM to enhance the ability of image segmentation. Ahmed et al [9] first modified the objective function of FCM by incorporating spatial neighborhood term (FCM_S). Later, two variants [10] listed as FCM_S1 and FCM_S2 were proposed to raise the calculation speed of FCM_S. Meanwhile, their corresponding kernel versions of KFCM_S1 and KFCM_S2 were presented. Moreover, two fast algorithms called enhanced FCM algorithm (EnFCM) [11] and fast generalized FCM algorithm (FGFCM) [12] were performed on the basis of gray level histogram of their respective novel filtering images. Later, Krinidis and Chatzis [13] proposed a fuzzy local information c-means algorithm (FLICM), which was fully free of the empirically adjusted parameters, and then some variants of FLICM were proposed [14–17]. Recently, some literatures used non-local spatial information [18, 19] to segment images in when the images heavily contaminated by noise. Based on the local or non-local spatial information, these above algorithms achieved better performance than FCM. However, the major drawback of these algorithms is that they often fall into local optimal solutions when the initial cluster centers are not appropriate. Hence, some researchers tried to utilize metaheuristics to optimize the objective function of FCM and its variants for searching the global optimum. Some of the well-known metaheuristics, like genetic algorithm (GA) [20, 21], particle swarm optimization (PSO) algorithm [22], evolutionary algorithm (EA) [23] and their hybridization algorithm [24], were adopted to avoid trapping into local minima.
Admittedly, some of the above algorithms have achieved commendable segmentation results, but there is still further work to be done. Firstly, as we all know that all least-squares-based FCM algorithms tend to equalize the pixels in their segmentation process [25] because they tend to draw the centers of smaller clusters to their adjacent larger clusters for images containing clusters with unbalanced cluster sizes. However, very few attempts to solve this situation [26–28]. Noordam et al [26] proposed cluster size insensitive FCM (CsiFCM) algorithm by introducing the ratios between the cluster sizes to the clustering process. Lin et al [27] presented size-insensitive integrity-based FCM (siibFCM) method and Liu et al [28] integrated the sum of membership degrees of each cluster into the iterative process for unbalanced dataset. Nevertheless, the improvements of these efforts are not reflected in the objective function. Secondly, we also find that the influence of the pixel distribution of each cluster on cluster results is rarely considered in the iteration process. Thirdly, According to literatures [20–24], the metaheuristics can increase the probability of finding a good solution and escaping from local optima, but in addition to setting the population size and maximum number of iterations, there are other additional parameters that need to be set, which is annoying and time-consuming. In other words, the fewer parameters that the algorithm needs to adjust, the easier it is to execute. Luckily, Askarzadeh [29] proposed a novel method for solving engineering optimization problems named as Crow search algorithm (CSA), which is simple since it has only two adjustable parameters (flight length and awareness probability) based on the intelligent behavior of crows. Although the CSA is promising, it is essential to improve or extend the CSA due to its slow convergence speed.
Aiming at the three points above, this paper makes corresponding efforts. Firstly, inspired by [28], we embed the sum of the membership degree of each cluster into the objective function of the noise detecting fuzzy c-means algorithm (NDFCM) [30]. The goal is to equalize the contribution of the larger and smaller clusters to the new objective function. The reformative objective function is effectively characterize images with unequal cluster sizes while inheriting the NDFCM’s ability of denoising and maintaining detail information. Secondly, a new expression named compactness is designed to measure the distribution of each cluster and then introduced into the clustering process. Thirdly, a two –paths hybrid strategy combining chaotic CSA and gradient method is used for optimizing the segmentation problem. Gradient method means that after the initialization of the cluster centers, the membership degree and cluster centers are executed iteratively until the cluster centers are stable. As previously described, the advantage of CSA is that only two adjustable parameters are required. Meanwhile, the chaotic CSA can product a more uniform distribution of crows’ positions compared to CSA because of the ergodicity of chaotic map [31] It is point out that the idea of chaotic map comes from others various chaos-based optimization algorithms, such as chaotic bee colony algorithms [32], chaotic particle swarm optimization algorithms [33], and so on. The CSA tends to explore the search space on a global scale and the gradient method is used to accelerate the local convergence speed. Thus, in this paper, we present a novel hybrid algorithm, called CCGFCM, based on chaotic CSA and gradient method for image segmentation.
The rest of this paper is structured as follows: Section 2 presents the most related works to this study, concerning the NDFCM and the CSA. Section 3 describes the details of the proposed approach, namely CCGFCM. Then the experimental results for demonstrating the effectiveness of our CCGFCM in Section 4. Finally, some remarks and discussions are given in Section 5.
Related works
NDFCM algorithm
FCM is a popular iterative algorithm and it aims at partitioning the data set into c clusters [8]. Let {
It should satisfy the following conditions
The NDFCM algorithm [30] is a novel modified version of FCM, and its objective function is expressed as follows:
By minimizing Equation (3) using the Lagrange multiplier method, the new cluster center v
i
and membership degree u
ij
are deduced as follows:
As shown above, NDFCM uses two kinds of image information, namely ξ j and x j , to aim at maintaining detail information and denoising respectively. The parameter α j is to balance these two parts in Equation (3). See reference [30] for the specific implementation process of this algorithm.
CSA [29] is a novel metaheuristic optimizer based on the intelligent behavior of crows, which is good at solving constrained engineering optimization problems. Usually, crows have the following behavior: they live in the form of flock, but each crow store excess food in a certain position and retrieve the food when it is needed. Crows watch and follow each other to steal the food, but the crows following by others have a certain probability of keeping their food from being stolen.
When solving the optimization problems, it is assumed that there is a d-dimensional environment including a total of N crows. The position of crow i at time (iteration) iter in the search space is expressed as
This section is described in three parts. In section 3.1, we introduced the sum of the membership degree of each cluster as the divisor into the objective function of NDFCM, which is to weaken the contribution of the pixels from the larger cluster while retaining the contribution of the pixels from the smaller cluster so that the larger cluster will not have enough influence to pull the center of the smaller cluster towards itself. Accordingly, the new membership degree and cluster center are deduced when the Lagrange multiplier rule is applied to solve the new fuzzy clustering model. In section 3.2, the density of each cluster is considered. Specifically, we design a compactness expression to characterize it. Subsequently, it can be integrated into the clustering process to enhance the segmentation effect. In section 3.3, the composition and working mode of the two- paths hybrid algorithm are described. In detail, this section expounds the path source (composition) of the two- paths hybrid algorithm: one is gradient method and the other is chaotic crow algorithm. The working mode (execution process) of two- paths hybrid optimization is precisely described.
Reformative objective function of NDFCM
The NDFCM improved the robustness of previous FCM-based image segmentation algorithms, but it did not take into account the difference in the size of each cluster. As a result, a part of pixels in larger clusters will be partitioned into the smaller clusters incorrectly. To deal with this problem, the objective function of NDFCM is reformulated, abbreviated as RNDFCM, which is written as follows:
It should be noted that the constraint conditions of u
ij
still satisfy the Equation (2). Apparently, the expression
For obtaining the cluster center v i and membership degree u ij , the constraints in Equation (2) are embedded into the objective function in Equation (10) using the Lagrange multipliers rule, as follows:
Taking the partial derivative of L RNDFCM with respect to u ij , and then setting it to zero, we can get:
By the Equation (12), we can obtain
Based on the constraint
And then we get
Substituting Equation (15) into Equation (13), we have
From the Equation (16) we can see that u ij is nested, so at each iteration, we first get u ij according to Equation (7), and then update the u ij based on Equation (16).
Similarly, taking the partial derivative of L
RNDFCM
with respect to v
i
, and then setting it to zero, we can get.
Based on Equation (17), we can obtain
As described in section 3.1, we improve the objective function of NDFCM by taking into account the size of cluster. Here, density differences between different clusters are also considered. The compactness [34, 35] is an effective index to measure the density of cluster and we propose a new compactness which is expressed as follows:
where C
i
is compactness of the cluster i, and
Where μ i is average value between the subset of cluster i and the cluster center v i . Obviously, the smaller C i , the higher density of the cluster.
Furthermore, the following equation is employed to normalize the compactness C
i
:
And then
Path source of the two- paths
It is essential to point out that the so-called path refers to the way to obtain the cluster centers. That is, the meaning of two-paths is that cluster centers can be obtained by two paths: the first path is generated by gradient method, and the other is derived from the chaotic CSA algorithm.
3.3.1.1. Gradient method (RNDFCM). As we all know that, FCM is very efficient for local search because of the advantage of gradient method. Similarly, NDFCM also inherits this advantage, namely, Equations (7) and (8) are alternately implemented until the termination condition is met after setting properly initialization cluster centers. By the motivation of FCM and NDFCM, the gradient method is also applied in the RNDFCM, which is listed as follows:
Step 1: Fix the maximum iterative number T, number of the clusters c, the threshold ɛ, and select appropriate parameters λ α , λ s and λ g ;
Step 2: Compute the mean-filtered image
Step 3: Randomly initialize cluster centers V={v1, v2, ... ,v c };
Step 4: Initial the membership degree U using the Equation (7);
Step 5: Compute the membership degree U using Equation (16);
Step 6: Refresh the membership degree U using Equation (24);
Step 7: Update the cluster centers V using the Equation (18);
Step 8: Repeat Step 5 to 7 until |Vnew- Vold|⩽ɛ or the number of iteration reaches T.
From above implementation steps we can see that the gradient method of RNDFCM considers the cluster sizes and densities.
3.3.1.2. chaotic CSA. The implementation process of the CSA is shown in Section 2.2. We know that CSA uses the random method to initialize crow’s position, which may cause uneven distribution of crow’s position. Chaotic maps can traverse all states without repeating within a certain range according to their own laws and can search the search space more effectively, thus obtaining the global optimal solution or better satisfactory solution. In this paper, the Chebyshev map [36] is used to initialize the crow position and then enhance the diversity of the initial solution, which lays a good foundation for effective global search. The expression of Chebyshev map is as follows:
Step 1: Randomly generate an n-dimensional vector
Step 2: According to Equation (26), V0 is iterated (N-1) times to generate other (N-1) crow individuals.
Thus, the initialization step is completed.
Obviously, the chaotic CSA here means that the crow position of CSA is initialized by Chebyshev map method, and then the optimization problem is solved by following CSA steps.
3.3.2.1. The significance of two- paths hybrid algorithm. The first path is produced by gradient method. As shown in section 3.3.1.1, the new cluster centers are computed by alternately implementing Step 5 to 7, so we can think that the new cluster centers contain gradient information. The second path is derived from the chaotic CSA algorithm. Let us take the crow i as an example and its position can be seemed as cluster centers. The new cluster centers (new position) are gained when the crow i randomly chooses one of the crows, for example the crow j, to follow regardless of the crow j knows or not to be tracked. We think that the new cluster centers contain chaotic CSA information in this scenario.
Apparently, the new cluster centers come from two different paths, which indicates that the possibility of searching the optimal solution is heightened, hence a natural idea is to combine the two paths for hybrid optimization in order to give full play to their advantages. Furthermore, the path of gradient method can perform efficient local search while the path of chaotic CSA algorithm can be used for global search.
3.3.2.2. The description of two- paths hybrid algorithm. In this section, we present details steps of the proposed algorithm (CCGFCM) which is based on chaotic CSA and gradient method for image segmentation. It is stated here that Equation (10) is used as the objective function of the proposed algorithm to guide the search process.
Parameters: Image X, maximum iterative number T, number of the clusters c, threshold ɛ, appropriate parameters λ α , λ s , λ g , the total number of crows P, the flight length fl, and the awareness probability AP;
Step 1.1: Compute the mean-filtered image
Step 1.2: Follow the steps shown in Section 3.4.1 to initialize cluster centers for all the crows {V2 i ,0, i = 1,2, ... , P}, and assume that the crows’ memories {M i ,0, i = 1,2, ... , P} is in their initialize positions (cluster centers);
Step 1.3: Compute membership degree {U2 i ,0, i = 1,2, ... , P} using Equation (7), then update {U2 i ,0, i = 1,2, ... , P} using Equation (16), and then refresh {U2 i ,0, i = 1,2, ... , P} using Equation (24);
Step 1.4: Compute values of fitness function F0={ f2(U2 i ,0, M i ,0)=f2(U2 i ,0, V2 i ,0), i = 1,2, ... , P} by Equation (10);
Step 1.5: let f*,0 = f(U2 l ,0, V2 l ,0)=min{f(U2 i ,0, V2 i ,0), i = 1,2, ... , P}, M0 best =V*,0 = V2 l ,0, where V*,0 and f*,0 indicate the optimal solutions and minimum value respectively;
Step 2.1:
Step 2.2:
End
Update Fk={min[f2(U2i,k, V2i,k), f2(U2i,k - 1, Mi,k - 1)], i = 1,2, ... , P };
Step 2.3: hybridization if f1(U1l,k, V1*,k)<min{ Fk }, Mkbest = V1*,k, V*,k=V1*,k, f*,k=f1(U1l,k, V1*,k); else V*,k=Mkbest, f*,k=min{ Fk }; end
Let k = k + 1, if k > T, go to Step 3,
Step 3.1: Compute the new membership degree U*,T following the process of Step 1.3 based on V*,T, and then obtain the segmentation results after defuzzification step with respect to U*,T;
Step 3.2: Output segmentation results.
Experimental study
Parameter settings and experimental images
To verify the efficiency of the proposed CCGFCM, FCM_S1 [10], FCM_S2 [10], EnFCM [11], FGFCM [12], IFCMS [22], CsiFCM [26], siibFCM [27], NDFCM [30] and RNDFCM are adopted as comparative algorithms in this paper. All the algorithms are implemented in MATLAB (2014a) and their respective parameters are presented in Table 2. It should be noted that the parameters used in comparative algorithms are all recommended parameters in corresponding literatures. Moreover, the AP value (AP = 0.2) in CCGFCM is larger than the recommended AP value (AP = 0.1) in CSA [29], the reason is that CCGFCM is composed of two- paths method, namely gradient method and chaotic CSA method. Gradient method has the function of fast convergence and local search, which makes the other path (chaotic CSA method) provide a larger value of AP, to enhance the global search ability. In order to compare objectively the different algorithms, we choose F_value [37] as the evaluation index, which is suitable for unbalanced data. Furthermore, the bigger the index, the better the segmentation result.
Crow search algorithm
Crow search algorithm
The parameters setting in these algorithms
In this experiment, a synthetic image named #syn and five industrial non-destructive testing (NDT) images named #NDT1- #NDT5 are used to testify the performance of CCGFCM algorithm. These images, their ground truth images and gray-level histograms are presented in Fig. 1. The gray-level histograms can indicate that these images have the characteristics of unequal cluster sizes and thus our test requirement for evaluating algorithms are fulfilled.
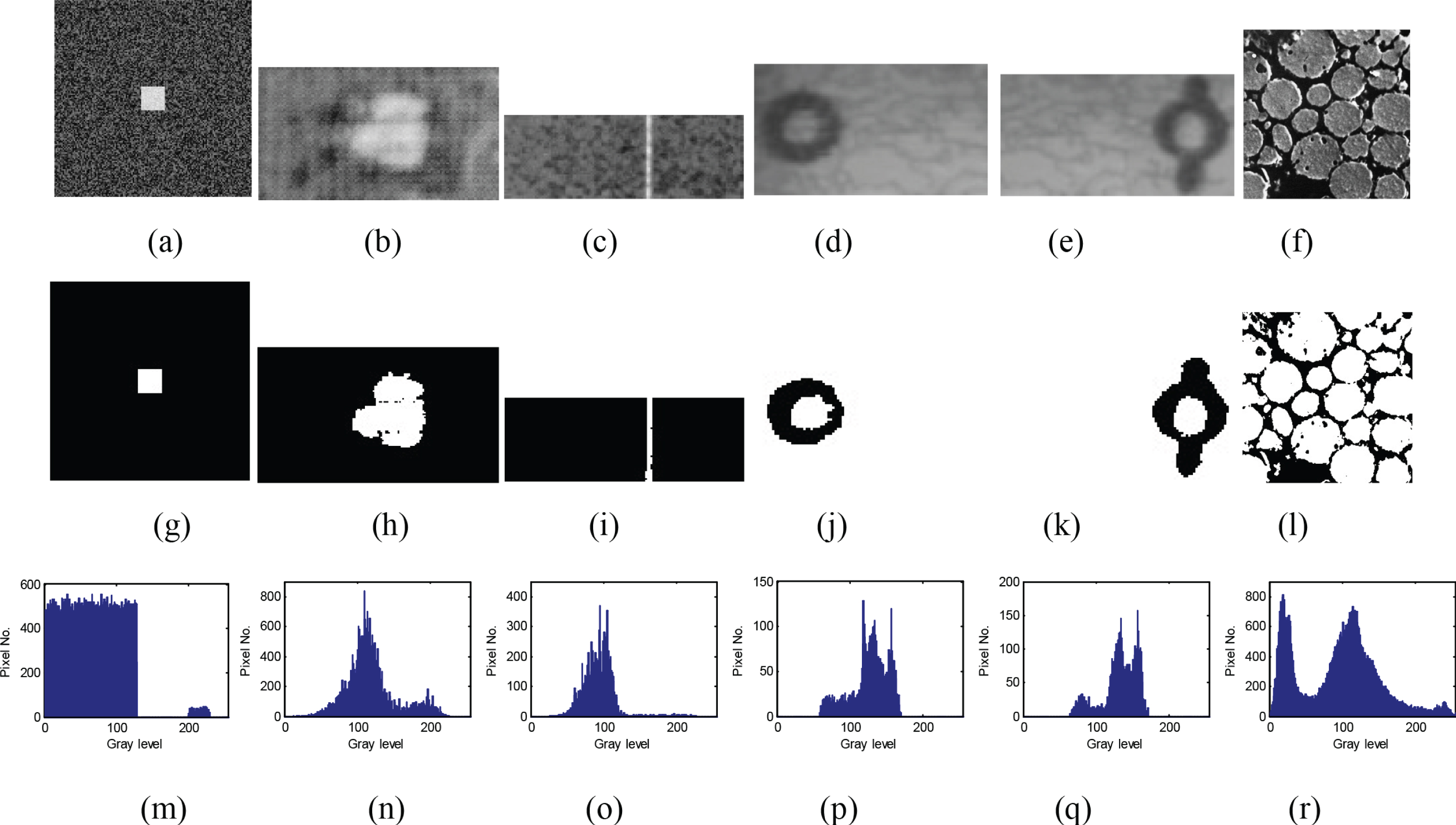
the synthetic image and the NDT images: (a) #syn; (b)-(f) #NDT1-5; (g) ground truth images of #syn; (h)-(l) ground truth images of #NDT1-5; (m) gray-level histograms of #syn; (n)-(r) gray-level histograms of #NDT1-5;
Experiments on synthetic image
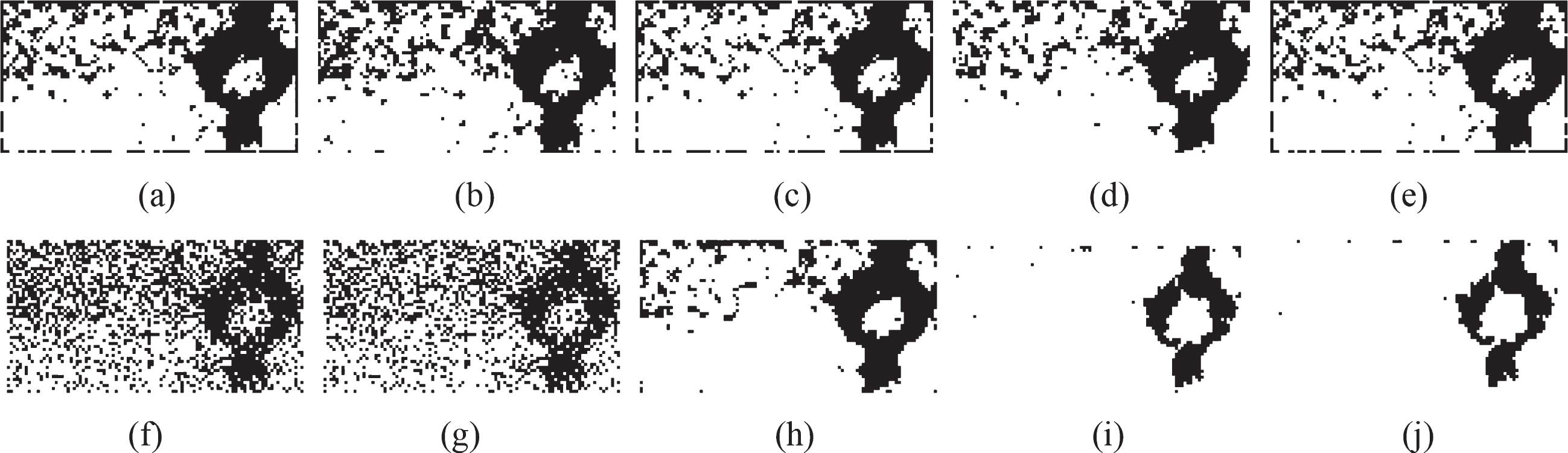
The image #syn with the characteristics of unequal cluster sizes includes two clusters: one is the background area with intensity ranging from 0 to 128 and the other is the small square foreground area with intensity from 200 to 228. To compare the robustness of the different algorithms cited above, we apply them firstly to segment the synthetic image #syn corrupted by White Gaussian noise (Normalized variance (NV) varying from 0.005 to 0.02 with increment 0.005) and Salt & Pepper noise (Noise percentage (NP) varying from 7% to 15% with the increment 4%). The F_value results on image #syn corrupted by different noise levels are shown in Table 3. Moreover, in order to visually compare the performance, the segmentation results of all the algorithms on image #syn corrupted by White Gaussian noise with NV = 0.02 and Salt & Pepper noise with NP = 15% are presented in Figs. 2-3.
The F_value results of these algorithms on images #syn corrupted by Gaussian noise or Salt & Pepper noise
The F_value results of these algorithms on images #syn corrupted by Gaussian noise or Salt & Pepper noise

Segmentation results on #syn with Gaussian noise (NV = 0.02): (a) FCM_S1; (b)FCM_S2; (c)EnFCM; (d)FGFCM; (e)IFCMS; (f)CsiFCM; (g)siibFCM; (h)NDFCM; (i) RNDFCM; (j)CCGFCM.
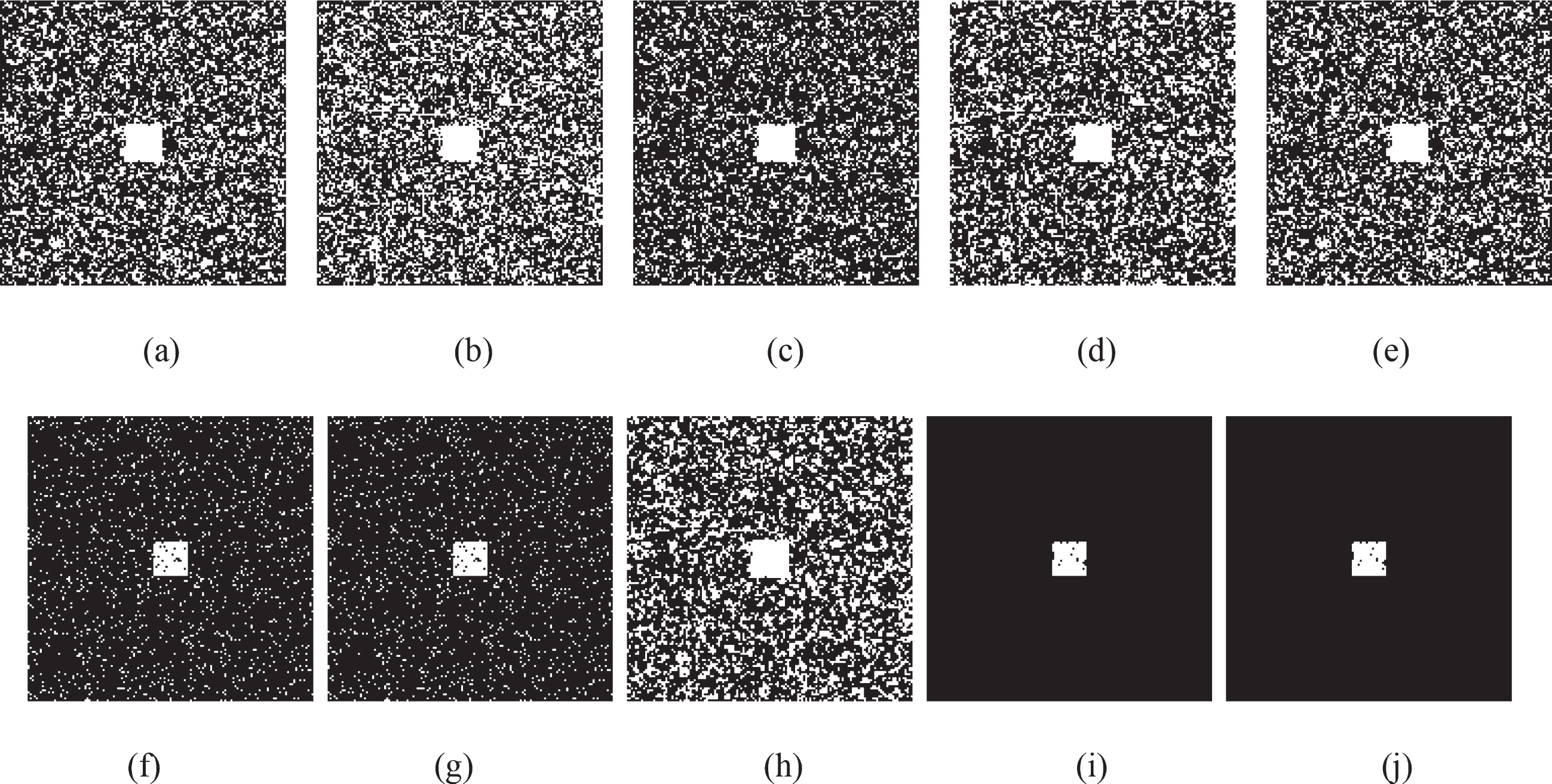
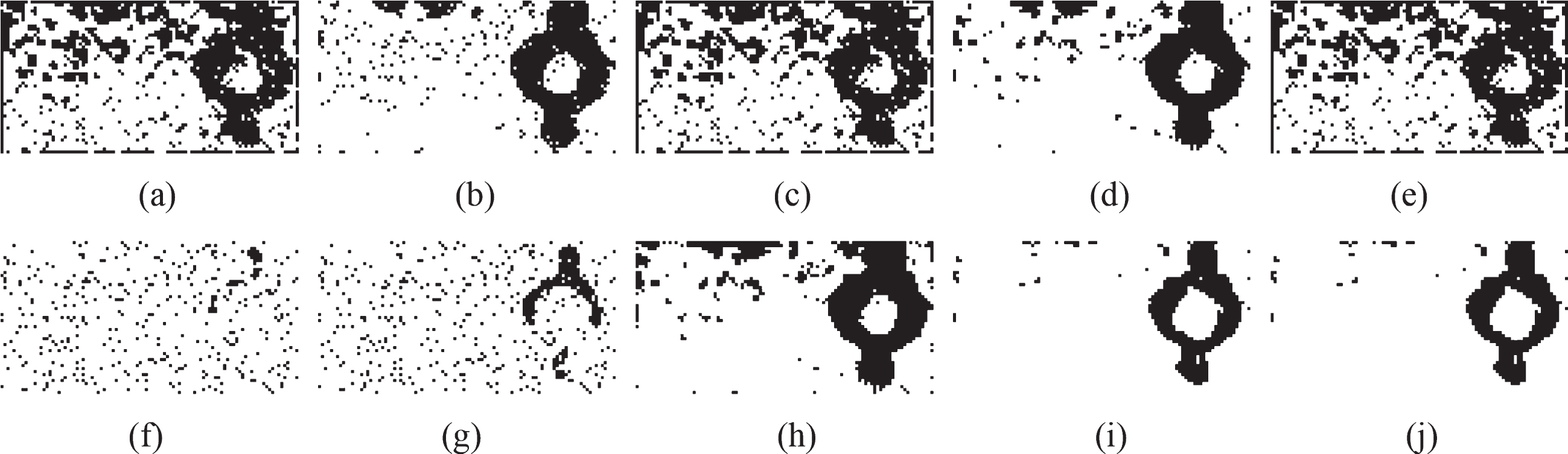
Segmentation results on #syn with Salt & Pepper noise (NP = 15%): (a) FCM_S1; (b)FCM_S2; (c)EnFCM; (d)FGFCM; (e)IFCMS; (f)CsiFCM; (g)siibFCM; (h)NDFCM; (i) RNDFCM; (j)CCGFCM.
The Table 3 shows that the CCGFCM performs better than the other methods in different noise types and levels. It is worth noting that the RNDFCM also do well in segmenting the #syn corrupted by Salt & Pepper noise or low level Gaussian noise(NV = 0.005), but it falls into local optimum in high Gaussian noise levels. The remaining algorithms are all trapped in local optimum, which shows that the improvement of the objective function is effective. Visually, in Figs. 2-3 we can see that the CCGFCM can effectively segment the #syn corrupted by White Gaussian noise with NV = 0.02 and Salt & Pepper noise with NP = 15%.
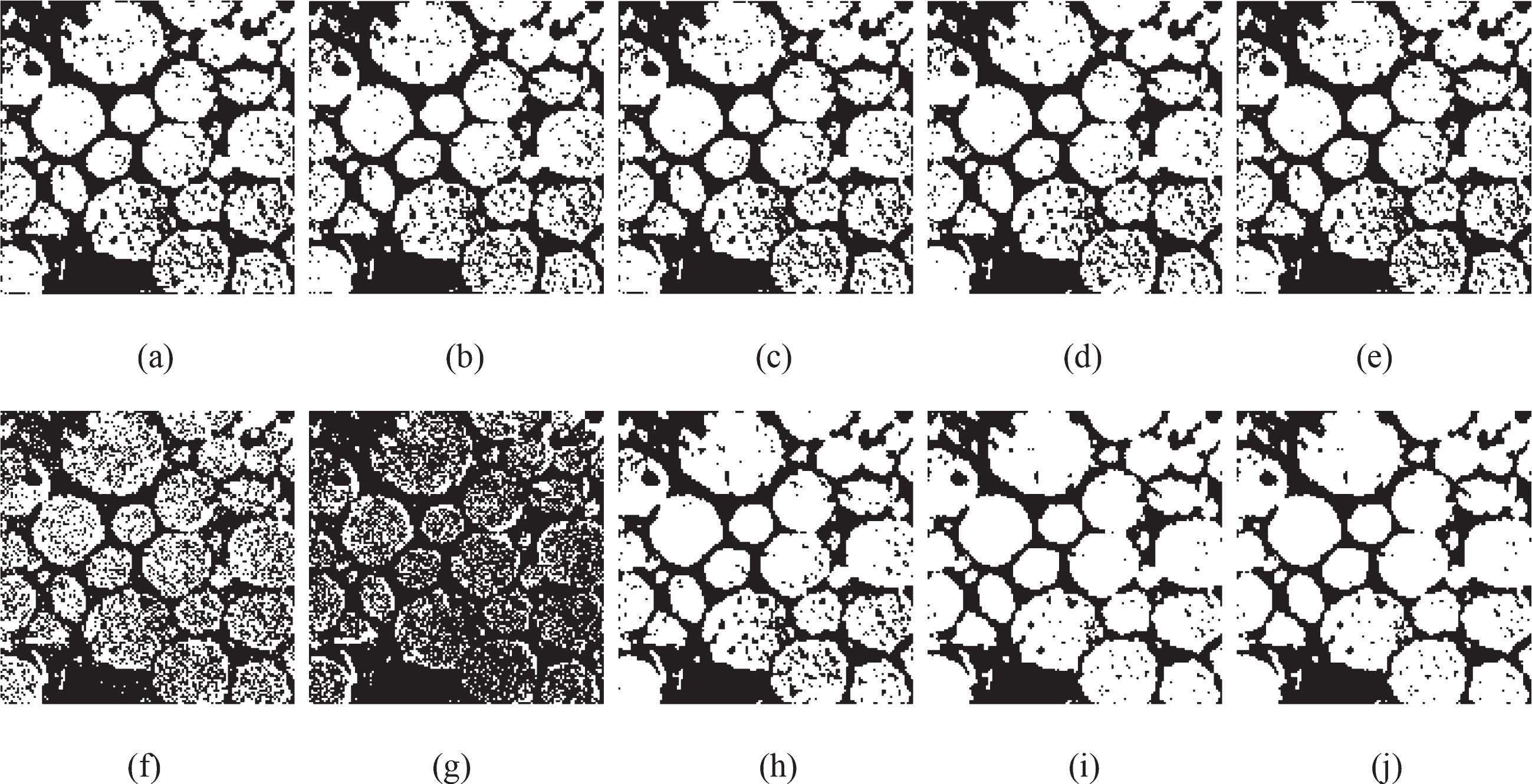
In this section the NDT images (named #NDT1-5) showed in Fig. (b)- (f) are used to testify the performance of CCGFCM. Here, we also artificially add White Gaussian noise (NV varying from 0.005 to 0.02 with increment 0.005) and Salt &Pepper noise (NP varying from 7% to 15% with the increment 4%) to these NDT images. The F_value results obtained by these ten algorithms on these NDT images are shown in Table 4. Figs. 4–13 demonstrate the visual segmentation performance of CCGFCM and the comparative algorithms when the NDT images are corrupted by White Gaussian noise with NV = 0.02 and Salt & Pepper noise with NP = 15% respectively.
The F_value results of these algorithms on #NDT1-5 images corrupted by Gaussian noise or Salt & Pepper noise
The F_value results of these algorithms on #NDT1-5 images corrupted by Gaussian noise or Salt & Pepper noise
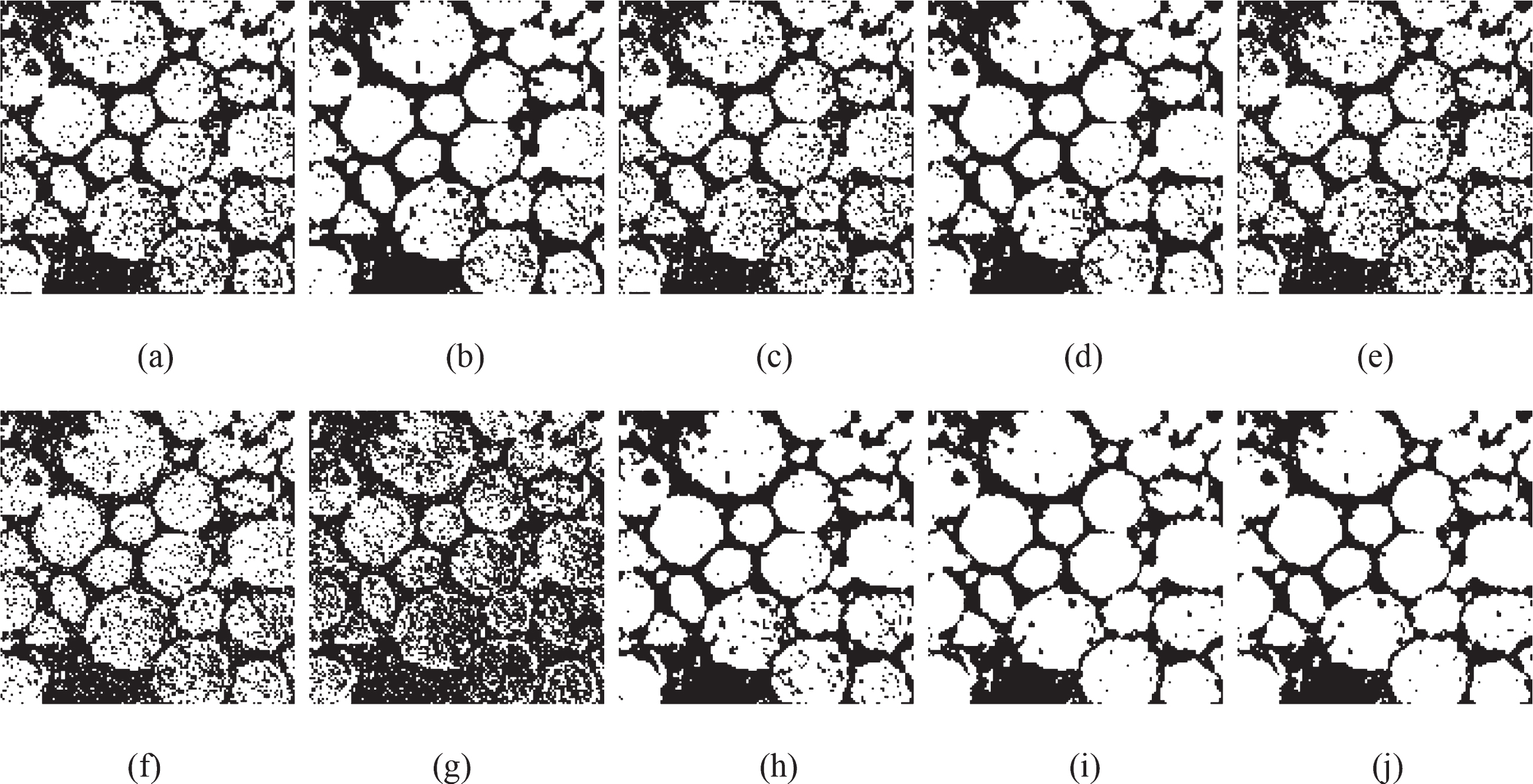
Table 4 shows that the F_value results from the NDT images (#NDT1-#NDT 5) corrupted by different noise types and levels for these ten algorithms. It may be noted that the F_value of the CCGFCM are close to 1 and thus demonstrate its effectiveness in most cases. Figs. 4–13 show the visual segmentation performance of these then algorithms for the five NDT images are corrupted by White Gaussian noise with NV = 0.02 and Salt & Pepper noise with NP = 15%. It reveals that CCGFCM outperforms the other algorithms for the #NDT2 image, that is to say, other algorithms cannot find the global optimal solution. The RNDFCM and the CCGFCM achieve the most similar visual results to the ground truth images of the other NDT images and better than the other algorithms.
From the segmentation experiments on synthetic image and NDT image, we can give some conclusions as followed: Except for RNDFCM and CCGFCM, other algorithms cannot segment noisy image with unequal cluster sizes effectively. The RNDFCM can able to segment some noisy images with unequal cluster sizes, while it often trapped into local optimum as result to cause segmentation failure. The two- paths hybrid algorithm of CCGFCM can search the global optimal solution and effectively segment noisy images with unequal cluster sizes.
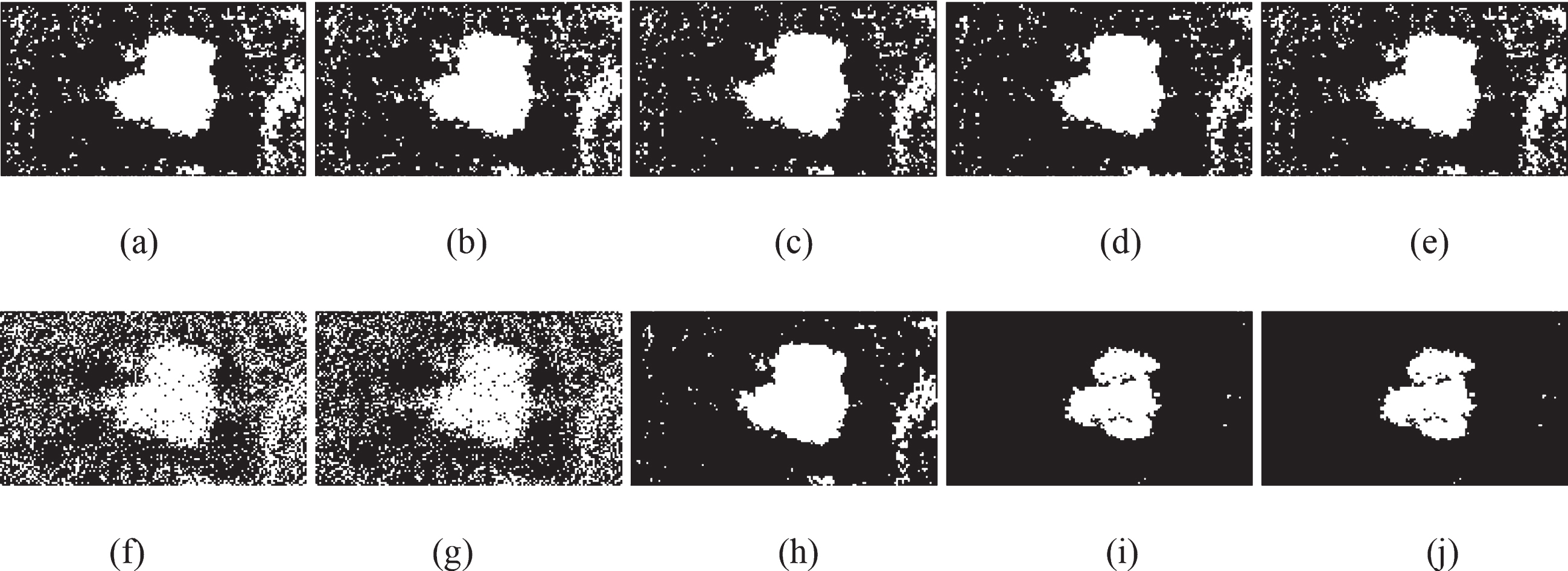
Segmentation results on #NDT1 with Gaussian noise (NV = 0.02): (a) FCM_S1; (b)FCM_S2; (c)EnFCM; (d)FGFCM; (e)IFCMS; (f)CsiFCM; (g)siibFCM; (h)NDFCM; (i) RNDFCM; (j)CCGFCM.
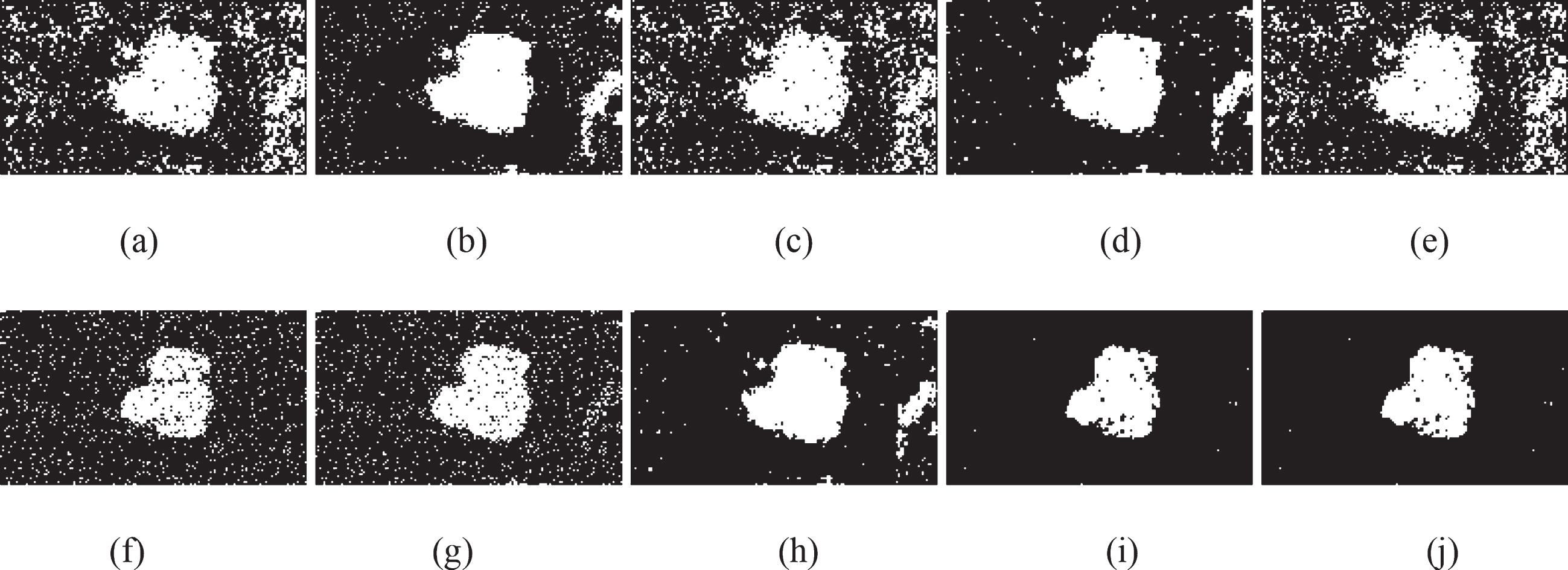
Segmentation results on #NDT1 with Salt & Pepper noise (NP = 15%): (a) FCM_S1; (b)FCM_S2; (c)EnFCM; (d)FGFCM; (e)IFCMS; (f)CsiFCM; (g)siibFCM; (h)NDFCM; (i) RNDFCM; (j)CCGFCM.
Segmentation results on #NDT2 with Gaussian noise (NV = 0.02): (a) FCM_S1; (b)FCM_S2; (c)EnFCM; (d)FGFCM; (e)IFCMS; (f)CsiFCM; (g)siibFCM; (h)NDFCM; (i) RNDFCM; (j)CCGFCM.
Segmentation results on #NDT2 with Salt & Pepper noise (NP = 15%): (a) FCM_S1; (b)FCM_S2; (c)EnFCM; (d)FGFCM; (e)IFCMS; (f)CsiFCM; (g)siibFCM; (h)NDFCM; (i) RNDFCM; (j)CCGFCM.
Segmentation results on #NDT3 with Gaussian noise (NV = 0.02): (a) FCM_S1; (b)FCM_S2; (c)EnFCM; (d)FGFCM; (e)IFCMS; (f)CsiFCM; (g)siibFCM; (h)NDFCM; (i) RNDFCM; (j)CCGFCM.
Segmentation results on #NDT3 with Salt & Pepper noise (NP = 15%): (a) FCM_S1; (b)FCM_S2; (c)EnFCM; (d)FGFCM; (e)IFCMS; (f)CsiFCM; (g)siibFCM; (h)NDFCM; (i) RNDFCM; (j)CCGFCM.
Segmentation results on #NDT4 with Gaussian noise (NV = 0.02): (a) FCM_S1; (b)FCM_S2; (c)EnFCM; (d)FGFCM; (e)IFCMS; (f)CsiFCM; (g)siibFCM; (h)NDFCM; (i) RNDFCM; (j)CCGFCM.
Segmentation results on #NDT4 with Salt & Pepper noise (NP = 15%): (a) FCM_S1; (b)FCM_S2; (c)EnFCM; (d)FGFCM; (e)IFCMS; (f)CsiFCM; (g)siibFCM; (h)NDFCM; (i) RNDFCM; (j)CCGFCM.
Segmentation results on #NDT5 with Gaussian noise (NV = 0.02): (a) FCM_S1; (b)FCM_S2; (c)EnFCM; (d)FGFCM; (e)IFCMS; (f)CsiFCM; (g)siibFCM; (h)NDFCM; (i) RNDFCM; (j)CCGFCM.
Segmentation results on #NDT5 with Salt & Pepper noise (NP = 15%): (a) FCM_S1; (b)FCM_S2; (c)EnFCM; (d)FGFCM; (e)IFCMS; (f)CsiFCM; (g)siibFCM; (h)NDFCM; (i)RNDFCM; (j)CCGFCM.
In this section, a robustness evaluation index [39] is introduced to evaluate the robustness of CCGFCM and the other algorithms. In detail, for the algorithm i, its relative performance on an image is represented by the ratio R
i
of its evaluating indicator (F_value) to the highest indicator value among all the compared algorithms. R
i
is calculated as follows:
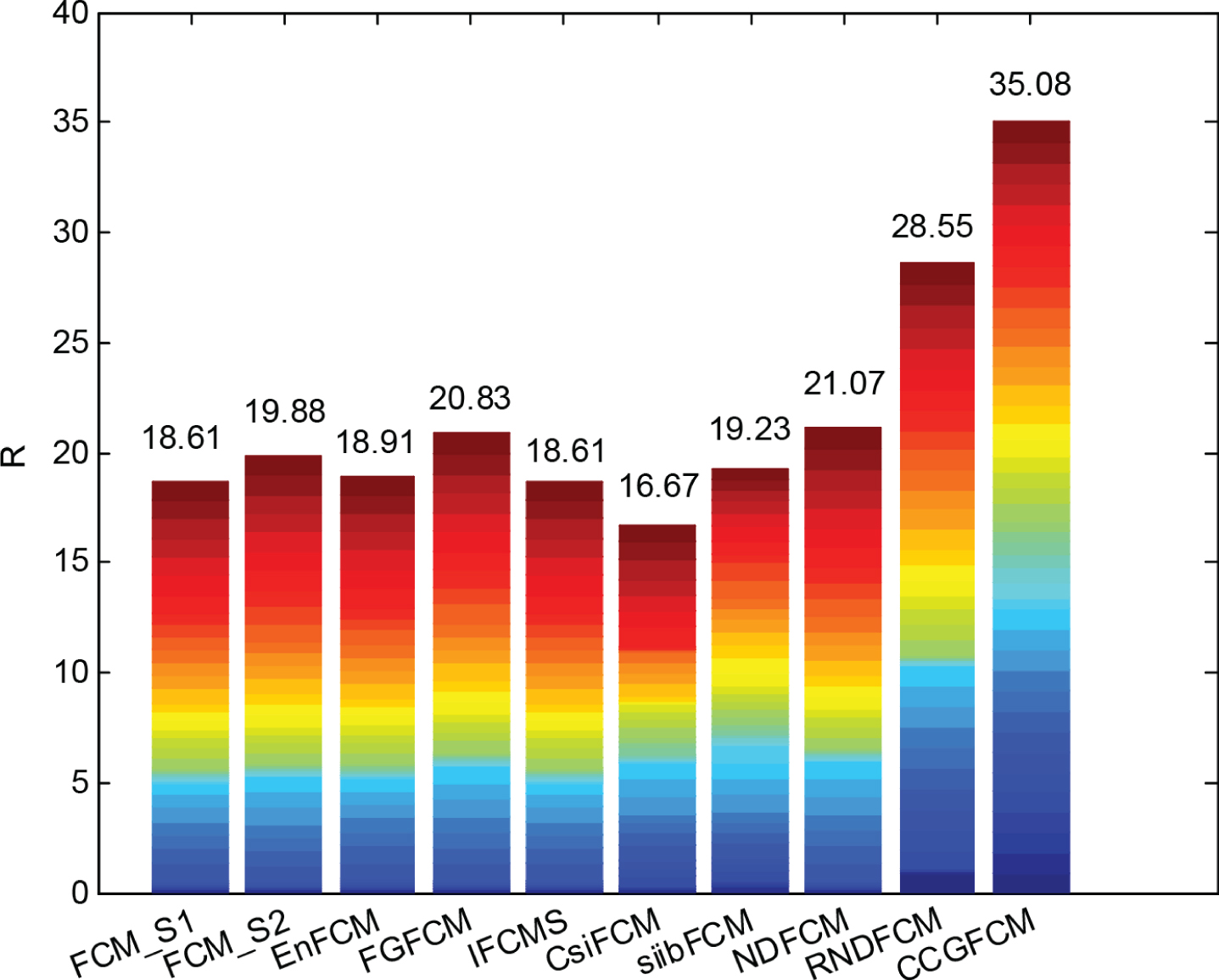
Robustness of the compared algorithms.
In FCM or some improved FCM models used for image segmentation, a crucial issue is how to construct objective function to segment the images with the characteristics of unequal cluster sizes. Moreover, models often fall into local optimal solutions when the initial cluster centers are improper. To properly deal with these two drawbacks, a novel FCM algorithm called CCGFCM algorithm is put forward and investigated.
The research of the proposed CCGFCM approach is summarized as follows. To begin with, the sum of membership degree of each cluster as the divisor is embedded into the objective function of NDFCM, so that the influence of cluster size imbalance on clustering results can be weakened. Furthermore, a novel compactness measure via the density of each cluster index is presented to measure the density differences between clusters. Following that, the RNDFCM, also known as gradient method, is established based on the new objective function and density of each cluster index. And then the CCGFCM is constructed and described by the fusion of gradient method and a global optimization method named chaotic CSA with fewer adjustable parameters. Finally, from the testing for the synthetic image and NDT images, the proposed CCGFCM algorithm is better than related comparative algorithms from the angles of both performance indexes and visual effects.
In the future, we can combine CCGFCM algorithm with the advanced denoising method, and the new algorithm will have better segmentation effect with significant levels of noise. In addition, designing the expression which is inversely related to the cluster size and integrating it into the objective function of improved FCM models can partly solve the segmentation problem that the algorithm is sensitive to cluster size. Furthermore, it is also worth doing to adjust CCGFCM in this paper to segment synthetic aperture radar images and color images.
Footnotes
Acknowledgments
The authors would like to thank the anonymous reviewers for their helpful comments and suggestions. This work is supported by the Educational Commission of Hebei Province of China (Nos. QN2020263, ZD2018212) and the Doctoral Research Initiation Fund of Hebei GEO University (No. BQ201606).