
Abstract
This paper focuses on the development of a stable Mamdani type-2 fuzzy logic based controller for automatic control of servo systems. The stability analysis of the fuzzy controller has been done by employing the concept of Lyapunov. The Lyapunov approach results in the derivation of an original stability analysis that can be used for designing the rule base of our proposed online gain adaptive Interval Type-2 Fuzzy Proportional Derivative controller (IT2-GFPD) for servo systems with assured stability. In this approach a quadratic positive definite Lyapunov function is used and sufficient stability conditions are satisfied by the adaptive type-2 fuzzy logic control system. Illustrative simulation studies with linear and nonlinear models as well as experimental results on a real-time servo system validate the stability and robustness of the developed intelligent IT2-GFPD. A comparative performance study of IT2-GFPD with other controllers in presence of noise and disturbance also proves the superiority of the proposed controller.
Keywords
Introduction
Fuzzy logic controllers (FLCs) are being successfully used for control schemes where there are difficulties in deriving mathematical models or having performance limitations with conventional linear control. Generally, fuzzy controller works with error (e) and change of error (Δe) as input variables. The output control action, u for proportional derivative (PD-type) and Δu the incremental control action for proportional integral (PI-type) are used as the fuzzy output variables. Here our designed fuzzy controller is an interval Type-2 fuzzy PD-type [1], so, the control output is represented by u, the rule consequent. In recent times, Type-2 fuzzy controllers are becoming relatively popular [2–8] for providing improved responses for processes with measurement uncertainty, model uncertainty as well as strong measurement noise. In such cases, Type-2 fuzzy controllers are found to be more competent for maintaining the desired process output compared to Type-1 or conventional fuzzy controllers. A good review on various successful industrial applications of Type-2 fuzzy controllers is reported in [8].
In this paper, we have worked with stability of fuzzy control which has been one of the major issues since the time of the Mamdani’s pioneer work [9, 10]. A close look at the review [11] and the comprehensive works [12–19] on the stability of Fuzzy model-based control system justifies that stability has been a challenging work in fuzzy control. But Zadeh has often explained that as fuzzy control has been accepted as a task-oriented control, hence, unlike conventional set point-oriented control, it does not require a rigorous mathematical analysis of stability [15]. Sugeno has also pointed out that the reliability to control hardware is considered more important than the stability of control [19].
The success of fuzzy control [20] shows that we do not require a stability theory for it. But for surety, the works on stability theory will certainly give us a wider view of future development of fuzzy control. Fuzzy controller themselves are basically nonlinear systems and stability analysis cannot be done by traditional stability analysis like the frequency analysis method (Bode and Nyquist criteria) or the s-plane methods (Nyquist criteria and Routh-Hurwitz). Therefore, many researcher have worked on it and improved the stability analysis of fuzzy control [11–17]. For the stability analysis, majority of the researchers [11–14] have used Lyapunov stability method. In this paper, we have also used the Lyapunov stability [14] to build a stable Mamdani Type-2 Fuzzy Logic controller for a very commonly used system [21, 22], the servo positioning mechanism, in this case, a servo system SRV02 by Quanser, Canada, [23]. In general, DC servo motors are usually employed in position control applications and such processes are of integrating in nature with small dead time. Here, by establishing the stability of each fuzzy subsystem the stability of the closed-loop system is guaranteed. The stability method allows to modify the controller rule base so that the controlled servo system becomes stable in the operating range fixed by the manipulated variable constraints.
In a conventional fuzzy controller, there is little scope for performance enhancement during plant operation as the number of control rules, related membership functions (MFs) and their corresponding scaling factors (SFs) remain unchanged [24]. Moreover, like non-fuzzy controllers, standard tuning guidelines for fuzzy controllers are also not available till date. But, it is found that satisfactory close-loop response may be achieved by choosing appropriate input-output SFs [25–32] and a proper fuzzy rule base [33]. To obtain improved performance for systems with nonlinearity and dead time, instead of having fixed tuning for fuzzy controllers, parameters (preferably SFs) need to be tuned online to provide necessary variation in control action to counteract the changes in process behavior [28–32].
However, for proper tuning of an FLC, the order of their (SFs) significance is quite important. Initially, we tune the SFs with global consequences and later on SFs with local consequences are chosen. Out of the various tunable parameters, SFs have the utmost priority due to their global effect on the control performance [34]. From the early days of fuzzy control, researchers have studied [25] the outcome of modifying the SFs based on the performance characteristics of FLCs. In this regard, a number of online tuning schemes for FLCs are reported in [26–32].
In this study, to enhance the performance of a conventional interval type-2 fuzzy PD controller (IT2-FPD), an online adaptation scheme of its input scaling factors (SFs) [26] is proposed. Both the input SFs for error (G e ) and change of error (G Δe ) are varied online depending on the current process error (e) and change of error (Δe). Further this controller’s rule base is also designed by the Lyapunov stability analysis approach for servo system. Hence, the resulting IT2-FPD with online gain adaptation mechanism and Lyapunov stability proved rule-base is termed as gain adaptive fuzzy PD controller (IT2-GFPD).
This paper is organized as follows: In Section 2, we have presented the introductory explanation of type-2 FLC’s. In Section 3, we explained the proposed controller, IT2-GFPD and its online gain adaptation scheme. The next Section 4, gives an illustration of the Lyapunov stability analysis approach to build a general rule base of IT2-GFPD for servo system. In Section 5, validation of the proposed controller has been presented with simulation and practical results and the concluding remarks are made in Section 6.
Type-2 fuzzy Logic control system structure
Type-2 fuzzy logic control system [2] consists of a process and a Type-2 fuzzy logic controller (T2-FLC) as shown in Fig. 1. Here, let XCR
n
be a universe of discourse. The accepted single input non-linear dynamical systems modeled by the state-space equations can be represented as

Block diagram of an IT2-FLC.
Where
Assuming each of x is partitioned by N number of membership functions, Type-2 fuzzy sets that are labeled by
Our objective is to design the rule-base of a Mamdani type-2 fuzzy controller that will position the servo-system at its desired position. The system has two-degree of freedom, process error e (k) and change of error Δe (k) ; and the kth sampling instant is defined as:
With F
p
(e, Δe) and the corresponding rule consequents, we perform the COS type reduction as given by
Here, the input and output variables are partitioned by 5 membership functions (MF) shown in Fig. 2. The 25 rules have been established following Lyapunov stability, as discussed in Section 4.
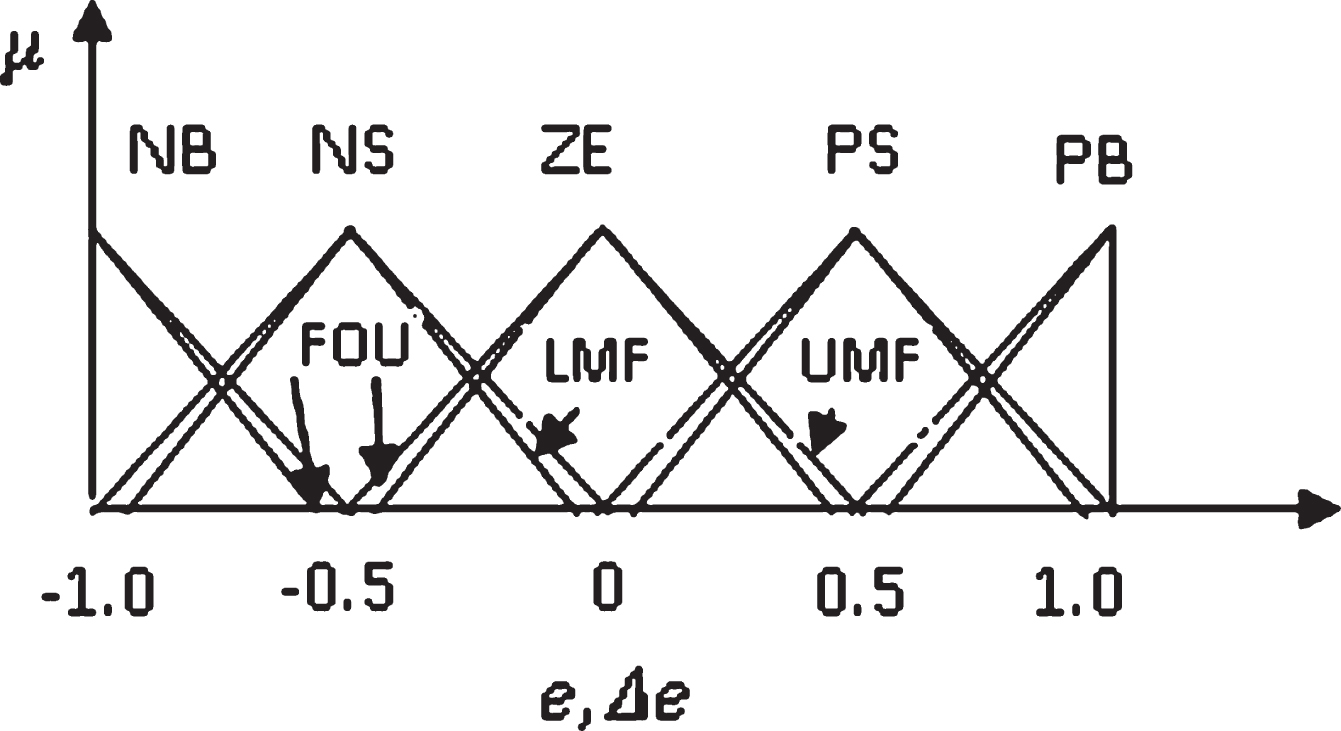
MFs for e, Δe and u with 5 Type-2 fuzzy sets.
Block diagram of the proposed IT2-GFPD is shown in Fig. 3. Normalized error (e
N
) and change of error (Δe
N
) are defined by Equations (9a) and (9b) respectively. The effective input scaling factors

Block diagram of the proposed IT2-GFPD controller.
Here, k2 and k3 are two positive constants which determine the extent of variation of the input SFs with the alteration of β. The value of β at k
th
sampling instant is determined by the mono-polar sigmoid function as given by the following relation:
In relation (10a), k1 is a positive constant, which determines the nature of variation of β with α. The expression for α is given by relation (10b), which is the product of e
N
and Δe
N
of the last sampling instant. Figure 4 shows the variation of β with α for different values of k1. From Fig. 4 we find that the value of k1 influences β in the following manners: (a) it governs the degree of nonlinearity of β which determines the sensitivity of
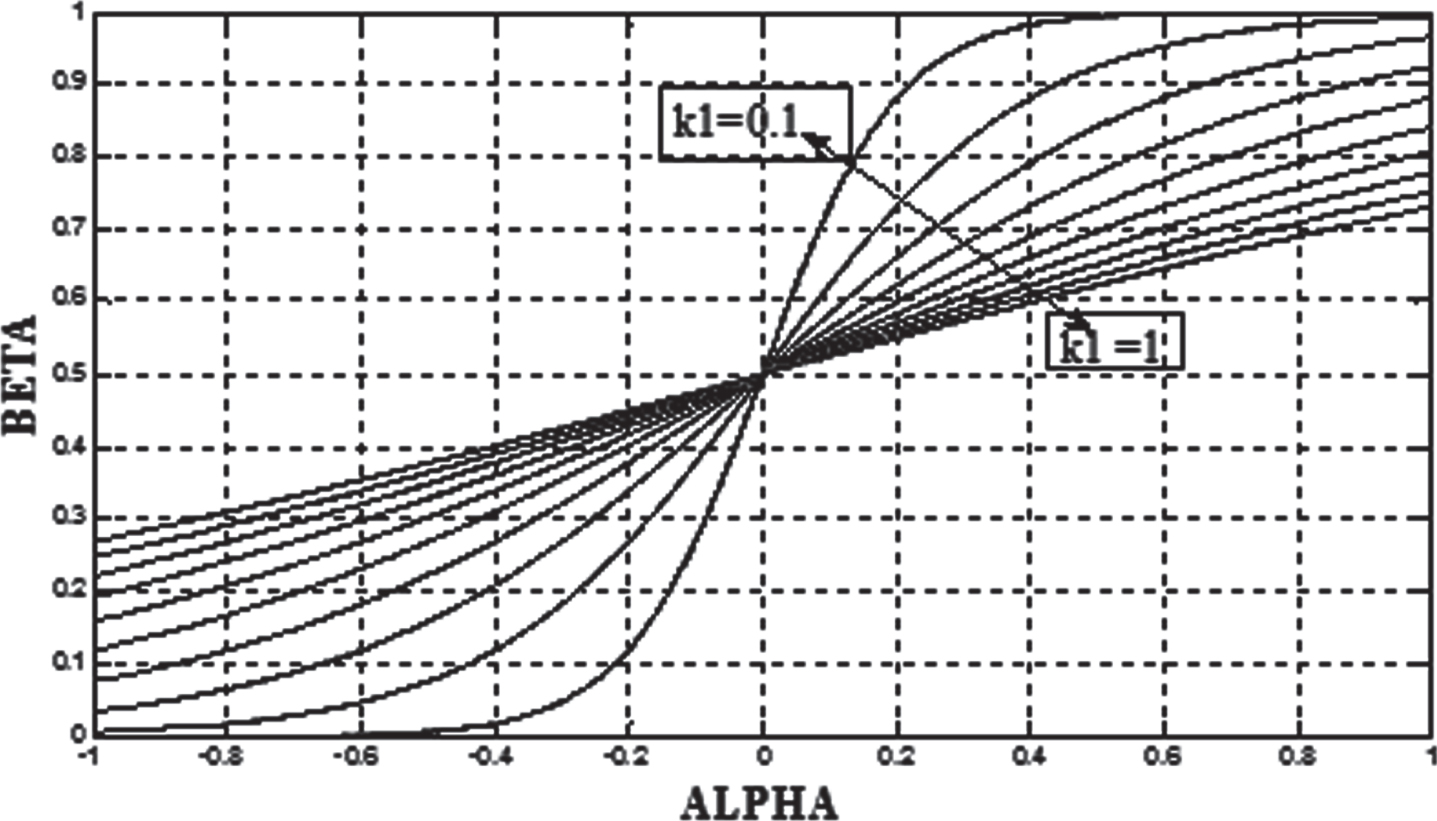
Variation of BETA (β) with ALPHA (α) for different values of k1.
The proposed online SFs adjustment for IT2-GFPD are suggested based on the concept of an operator’s control policy: when the process output is close to the desired value and approaching towards it then the control action is required to be weak to avoid unwanted oscillations, on the contrary, when the process output is moving away from the desired value, control action is required to be strong. As per the basic knowledge of close-loop dynamics, we can expect that such dynamic behavior in control action will give an improved servo response as well as improved load regulation without resulting large oscillation. Thus, the proposed gain adaptive mechanism is capable to provide the desired variation for both the proportional and derivative gains around the set point towards improving the transient and steady state responses. Note that during steady state condition when both error e = 0 and change of error Δe = 0, normalized inputs to the fuzzifier i.e. e
N
and Δe
N
will also be zero as they are defined by the product of non-zero scaling factors (
Stability analysis approach
According to our literature survey [11–16] application of the Lyapunov function based stability analysis proposed by Wong et al. [16], for systems controlled by Takagi-Sugeno type Type-1 FLCs is well acknowledged. Similar Lyapunov based method for the stability analysis of systems controlled by Mamdani type Type-1 FLCs is developed by Precup et al. [14]. This method is extended to the stability analysis of systems controlled by Type-2 FLCs considering the upper membership functions only, since the lower membership range is included in the upper one [13]. The idea behind all these above Lyapunov function based stability analysis methods is to break down the problem of analyzing the stability of the whole fuzzy system into analyzing each fuzzy sub-system individually. It requires the verification of the Lyapunov criterion for any sub-system consisting of a fuzzy rule and the state-space model of the system to be controlled. The derivative of the crisp Lyapunov function is computed for each rule taking into account the MFs used in the rule. The derivative is to be negative for all the crisp values within the ranges of the MFs in order that the sub-system formed by the rule becomes stable [13]. If each sub-system is proved to be stable then the whole fuzzy system becomes stable. Similar type of work on Fuzzy Lyapunov synthesis method for the design of stable type-2 Fuzzy controllers has also been found in [12, 17].
Here, the fuzzy subsystem consists of a practical servo process, SRV02 by Quanser, Canada [23] and a Type-2 Mamdani FLC. The schematic diagram of SRV02 is given in Fig. 5. The mathematical expression of the system has been derived theoretically by combining the Electrical and Mechanical equations combining the effect of load shaft speed in terms of the applied motor voltage V
m
(t).
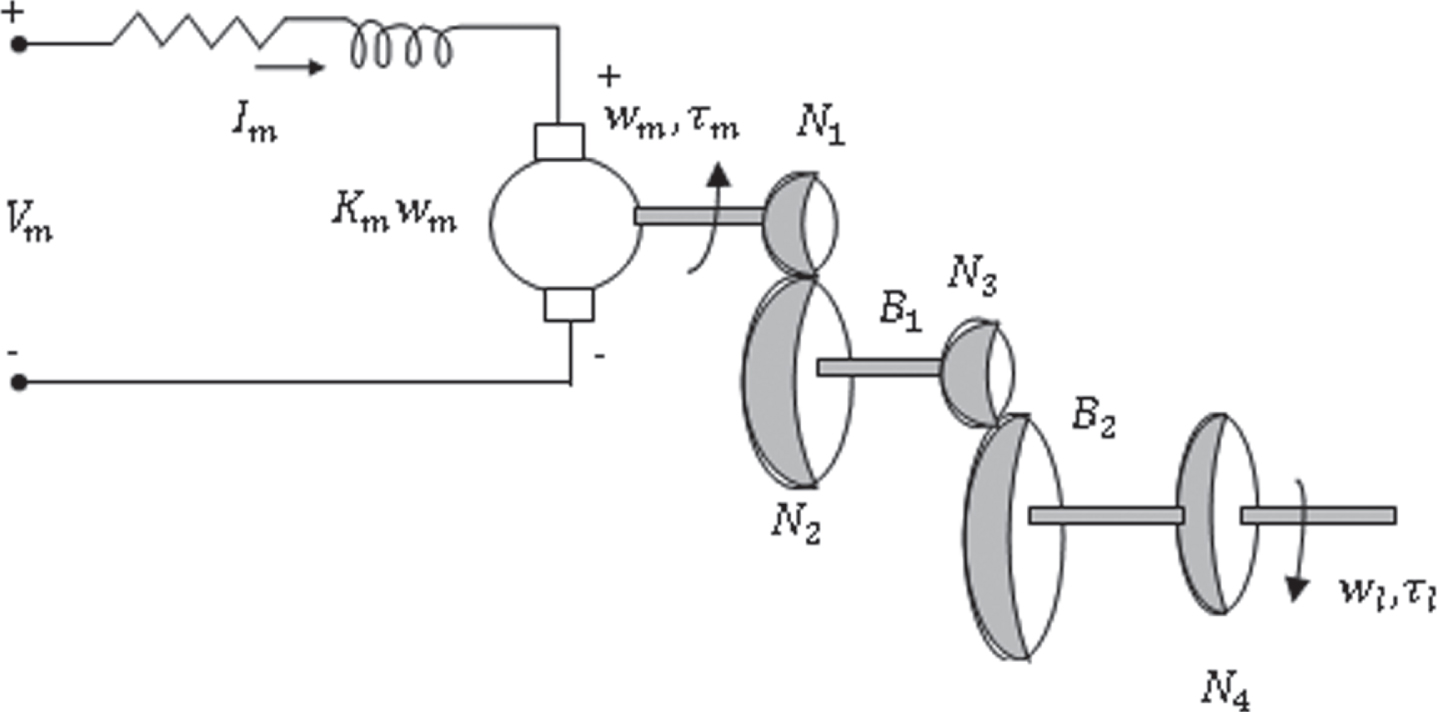
SRV02 DC motor armature circuit and gear train.
Where
Then, J eq is evaluated assuming disc load is attached to the high gear. Next, the value of Beq,v and A m can be theoretically calculated.
Performing the Bump test in the laboratory we have found the value of open loop steady state gain, K = 1.53rad/s/V, and time constant, τ = 0.0254s.
Hence, the open loop transfer function for position control system with SRV02 [23] is given by
We can represent the state-space equation given in Equation 1 for the servo process model (Equation (12)) as,
The stability analysis approach by Precup et al. [14] requires the verification of the Lyapunov criterion for any subsystem constituted by a rule and the subsystem to be controlled. Derivative of a common Lyapunov function is calculated for each rule, with reference to the membership functions of the inputs used in the rule. For each of the subsystems related to a particular rule it is necessary to prove that the derivative is always negative between the extremes of the membership functions range. Thus, the overall system will also be stable satisfying the following theorem:
Theorem 1: If P is a positive definite matrix then: V (
Also the set
Here, the mathematical model of the servo motor derived in Equation (12) can be written in the form of differential equation:
Where m = 0.0254 and K = 1.53; mandKare the open loop time constant (τ) and steady state gain respectively, x is the angular displacement and u is the input to the servo motor.
Now, we will define a set of state variables sufficient to describe the system in Equation (13) comprising of x and
Therefore, the state-space equation for the servo motor given by Equation (13) is represented as
In this study, without loss of generality, we may assume that z1 (t) = e (t) and
where
Hence, from Equation (18), V is positive and for
Hence, it is required that
Therefore, we need to design the rule-base of a Mamdani type-2 fuzzy controller that will be able to do smooth position-control of a servo-system and satisfy Equation (20). The fuzzy control rule base of IT2-GFPD is consisting of 25 rules and it is designed as shown in Table 1. Five Type-2 fuzzy sets - NB (negative big), NS (negative small), ZE (zero), PS (positive small), and PB (positive big) defined over the common normalized domain (– 1, 1) are used for defining the input (e, Δe) and output (u) variables for designing the FLC as shown in Fig. 2.
Rule base of the IT2-GFPD controller
The system stability can be proved by considering following five cases. Therefore, in each group of
Thus,
Therefore, taking Equation (20) into account for all the above cases where all possible fuzzy rules have been considered,
Next, it will be proved that the Condition 3 in Theorem 1 is also satisfied. Assuming that there is a trajectory with z2 (t) = 0, z1 (t) ≠ 0, which results

Lyapunov derivative surface plot.

Control surface of IT2-GFPD.
Observe that, in the proposed IT2-GFPD, input scaling factors are adapted online and they are multiplied with the input variables error (e) and change of error (Δe) to normalize them (Equations 9a and 9b). These normalized values of error (eN) and change of error (ΔeN) usually remain within the universe of discourse [+ 1, –1]. However, during close-loop operation, if the value of eN or ΔeN exceeds above +1 or less than – 1 then the value is saturated to +1 or – 1 respectively, according to Fig. 2. Since, every combination of eN and ΔeN fires some rules within the designed fuzzy rule-base of Table 1 satisfying Lyapunov stability Theorem 1. Therefore, the adaptive scaling factor seems to have little impact on the stability of our designed controller (IT2-GFPD) if the parameters (k1, k2, and k3) of the adaptive scaling factors (
To verify the effectiveness of the proposed IT2-GFPD, we have tested its performance on close-loop servo position control application through simulation study as well as real time experimentation. Here, it is to mention that same set of input-output SFs, G e = 1.0 ; G Δe = 3.0, G u = 3.0 for all the IT2-FPD type controllers are taken for both the servo process model and the real time servo system SRV02 [23]. The value of tuning parameter k2 and k3 present in gain updating relations 9(c) and 9(d) are heuristically chosen as k2 = k3 = 5 through trial and error for both the simulation study and hardware based experimental verification. As per previous discussions in Section 3, it is observed that the desired nonlinear variation in β is obtained with k1 = 0.2. To make comprehensive quantitative assessment among all the reported controllers several performance indices are evaluated. Percentage overshoot (% OS) and settling time (t s ) are calculated to evaluate the controller performance during transient response whereas integral absolute error (IAE) and integral time absolute error (ITAE) are calculated for steady state performance evaluation. For clear comparison among the controllers transient responses with different legends are provided during simulation as well as real time verification. The nature of MFs for Type-2 fuzzy PD controllers (IT2-FPD) as shown in Fig. 2 is considered to be identical to Type-1 and with 20% footprint of uncertainty (FOU). Control surfaces of IT2-FPD for 25 rules are given in Fig. 7 which is found to be highly non-linear. Presence of FOU in Type-2 fuzzy sets [35–37] includes an extra mathematical dimension to deal system uncertainties and measurement noise in a more efficient manner. For simplicity we consider secondary MF’s for Type-2 fuzzy sets as rectangular in nature. Performance of the proposed IT2-GFPD is compared with conventional PD, PID, type-1 fuzzy PID (FPID), type-2 fuzzy PD controller, Z-slicing [31] type-2 fuzzy, recently reported model based interval type-2 fuzzy PID with an online self-tuning mechanism (OST-IT2-FPID [32] and peak observer based interval type-2 fuzzy PID controller PO-IT2-FPID [35] under both set point change and load disturbance.
Simulation results of (23) with step input and load disturbance
Simulation results of (23) with step input and load disturbance
Related servo system is given by a first-order integrating plus dead-time (FOIPD) model:
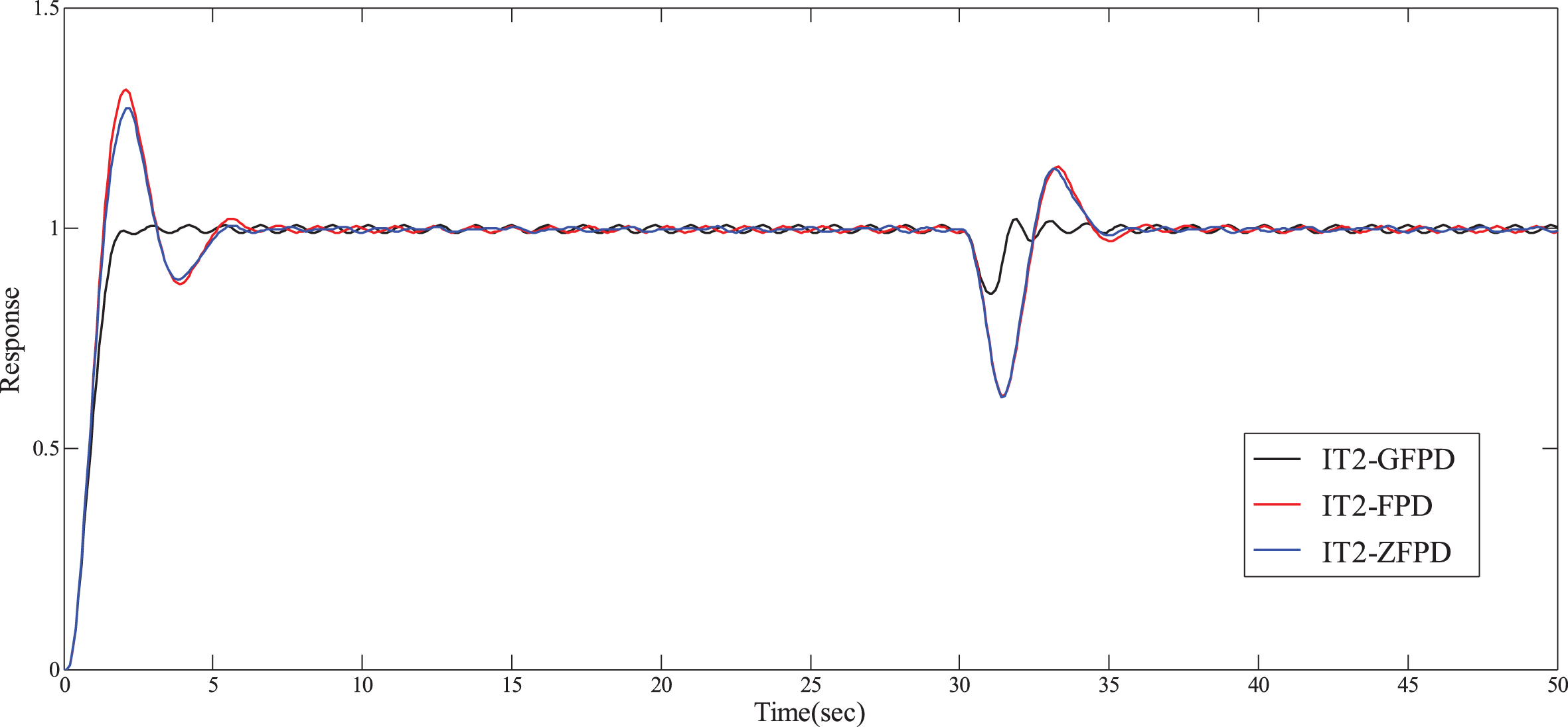
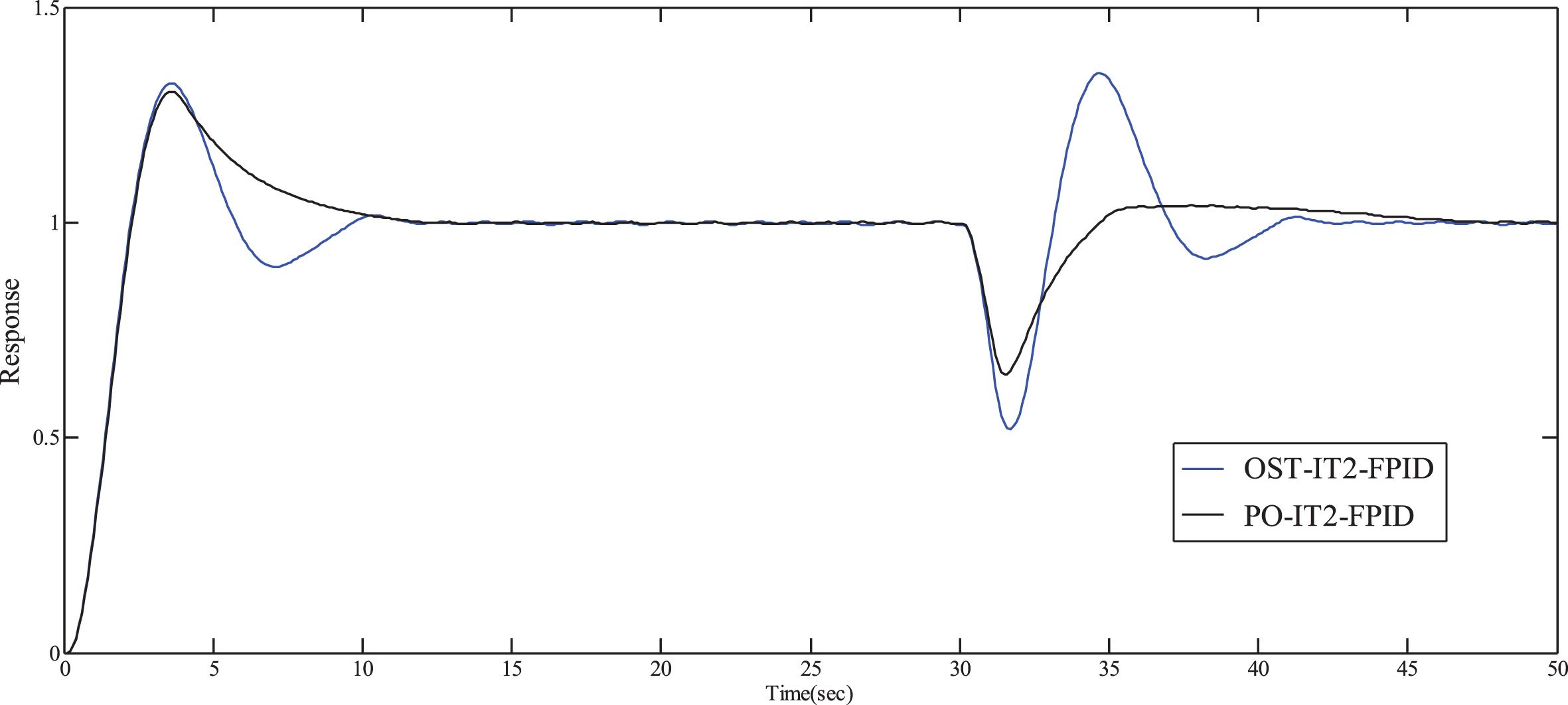
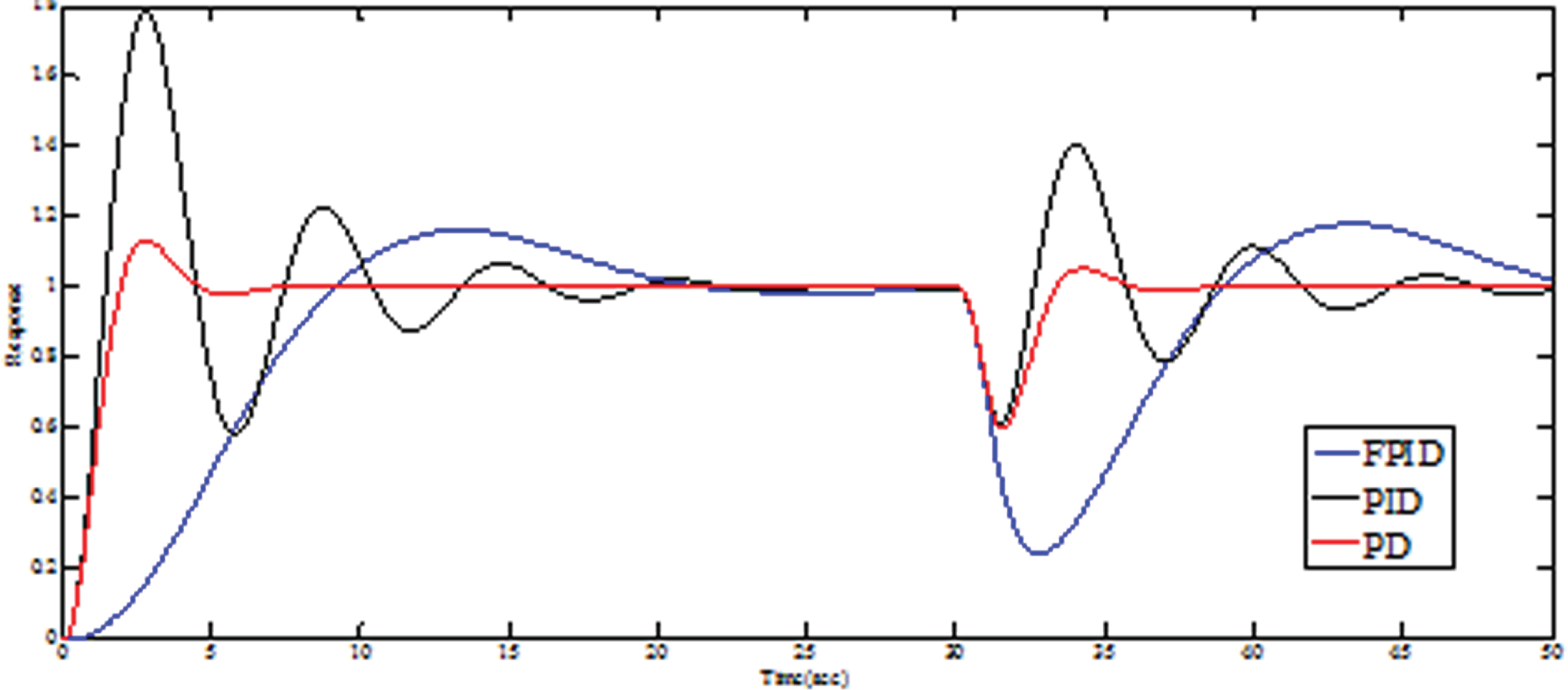
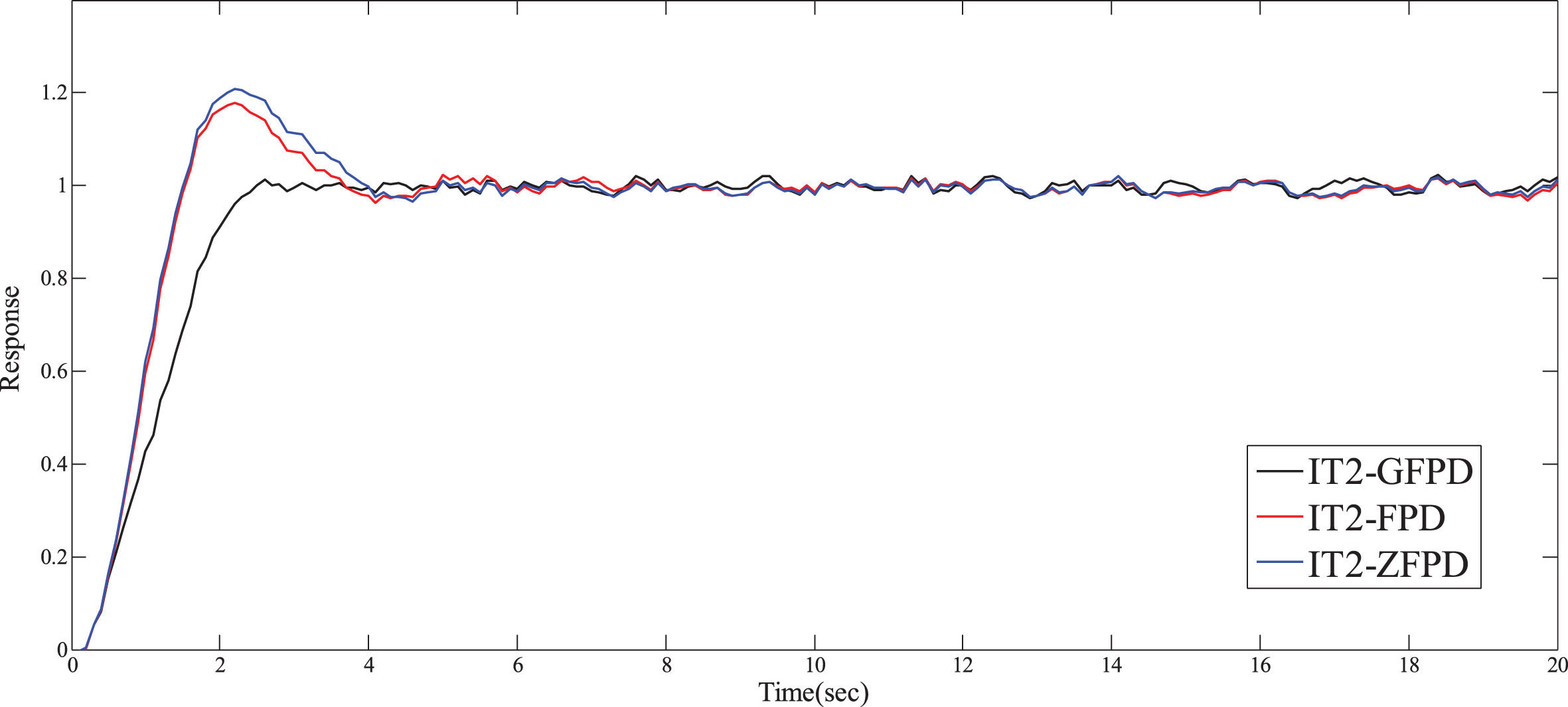
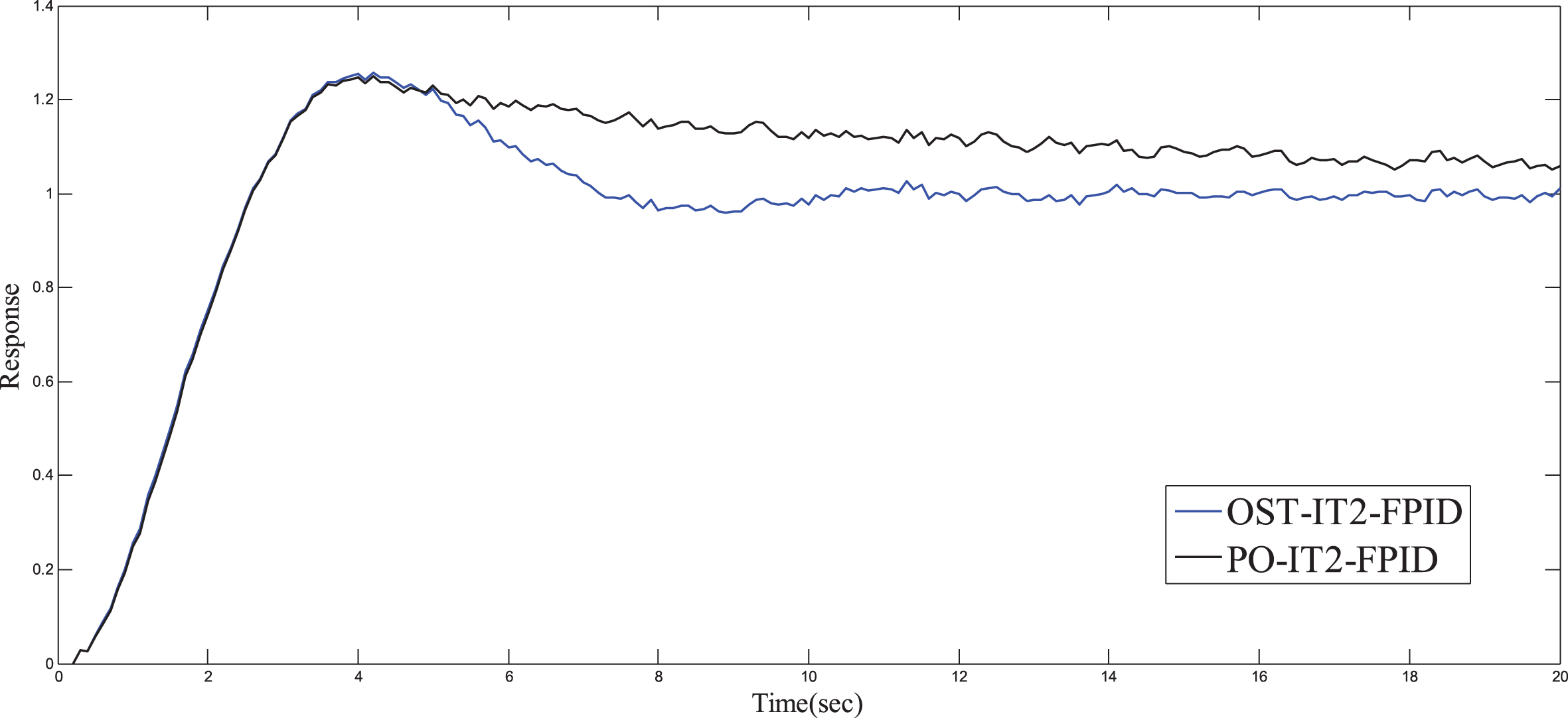
During simulation study, for the above process model, we consider K = 1 ; τ = 1 ; and dead-time θ d = 0.1 . Robustness and noise sensitivity of the proposed IT2-GFPD along with other reported controllers are also tested (keeping same set of controller settings) in presence of wide model uncertainty with considerable (50%) perturbation in process dead-time. Responses of the PD, PID, FPID, IT2-GFPD, IT2-FPD, IT2-ZFPD [31], OST-IT2-FPID [32] and PO-IT2-FPID [35] for the nominal model are depicted in Fig. 8 and for the perturbed model (50%) in Fig. 9. Performance indices for both the nominal and perturbed (50%) models are given in Table 2. In case of the proposed controller the overshoot almost disappears and an improved performance compared to the other controllers is also observed. The performance study with measurement noise (noise power = 0.001) is depicted in Fig. 10 and related performance indices are given in Table 3. Noise immunity of IT2-GFPD is found to be much superior compared to OST-IT2-FPID [32] and PO-IT2-FPID [35]. Responses with changing reference levels have also been illustrated in Figs. 11a and 11b, and the corresponding performance indices are given in Table 4. Here also, IT2-GFPD shows better performance than others. Figure 11c shows the responses of (23) with±50% perturbations in k1, k2, and k3 from their nominal values, which reveals that the adaptive SFs have little impact on the stability of our proposed IT2-GFPD as explained earlier in Section 4.
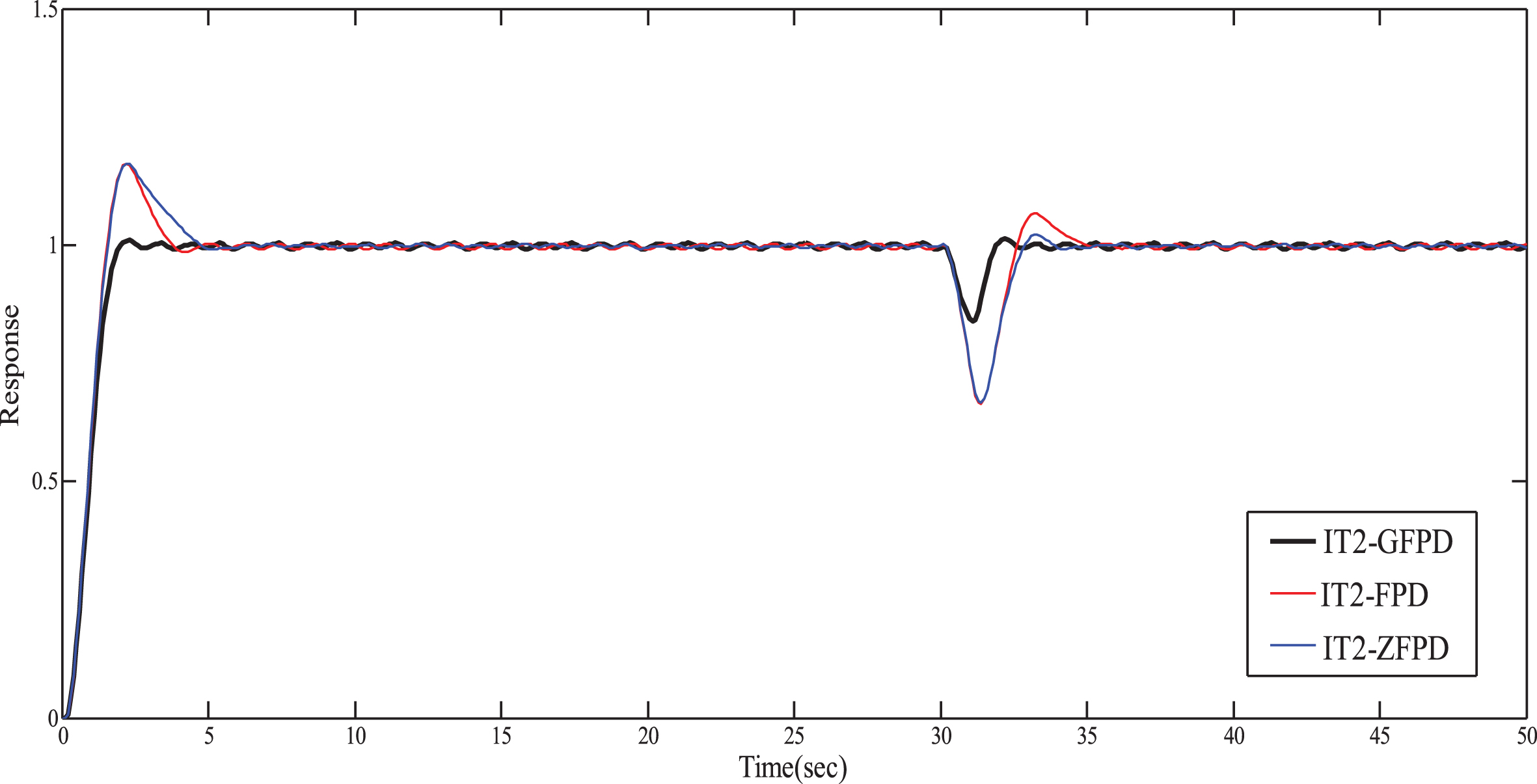
Responses of (23) with θ d = 0.1 for IT2-FPD, IT2-GFPD, IT2-ZFPD controllers.
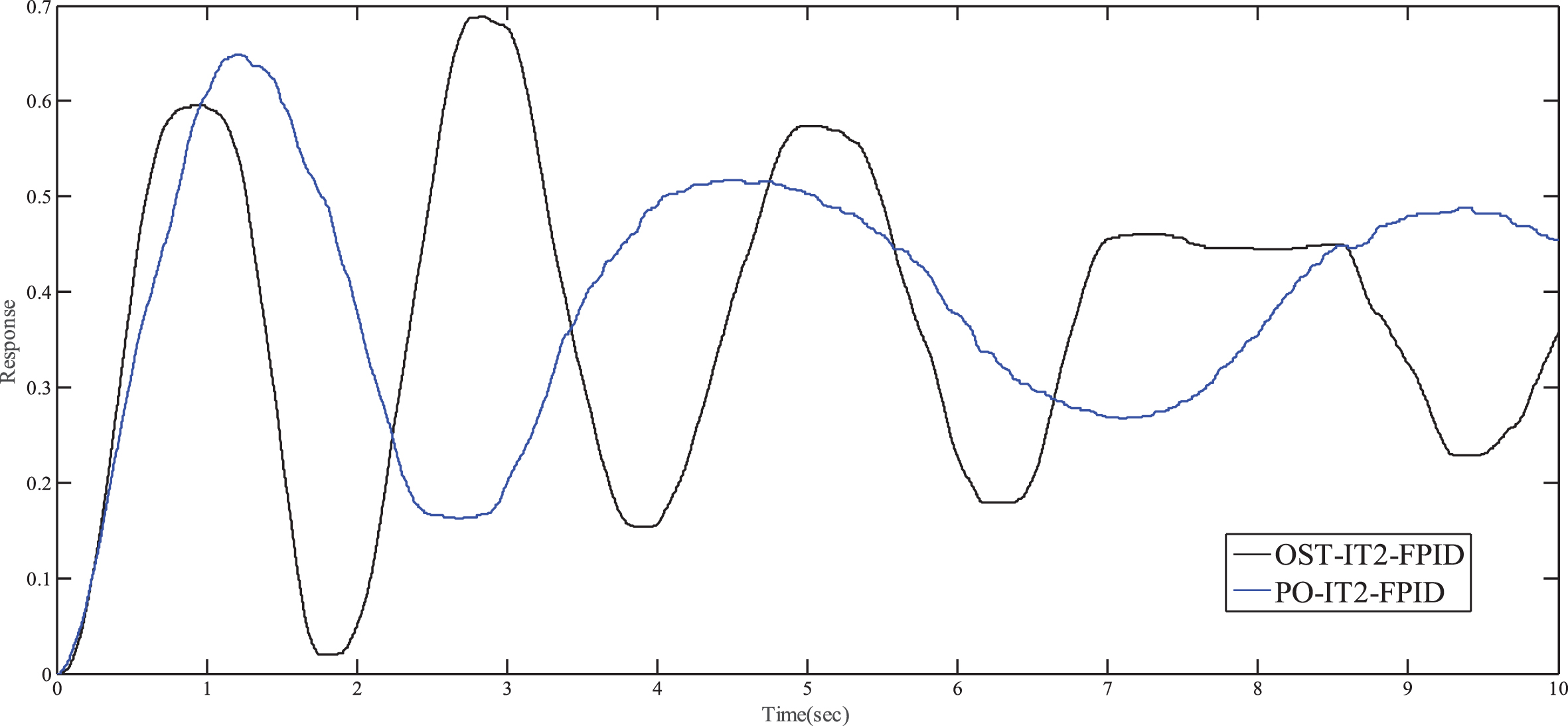
Responses of (23) with θ d = 0.1 for OST-IT2-FPID and PO-IT2-FPID controllers.
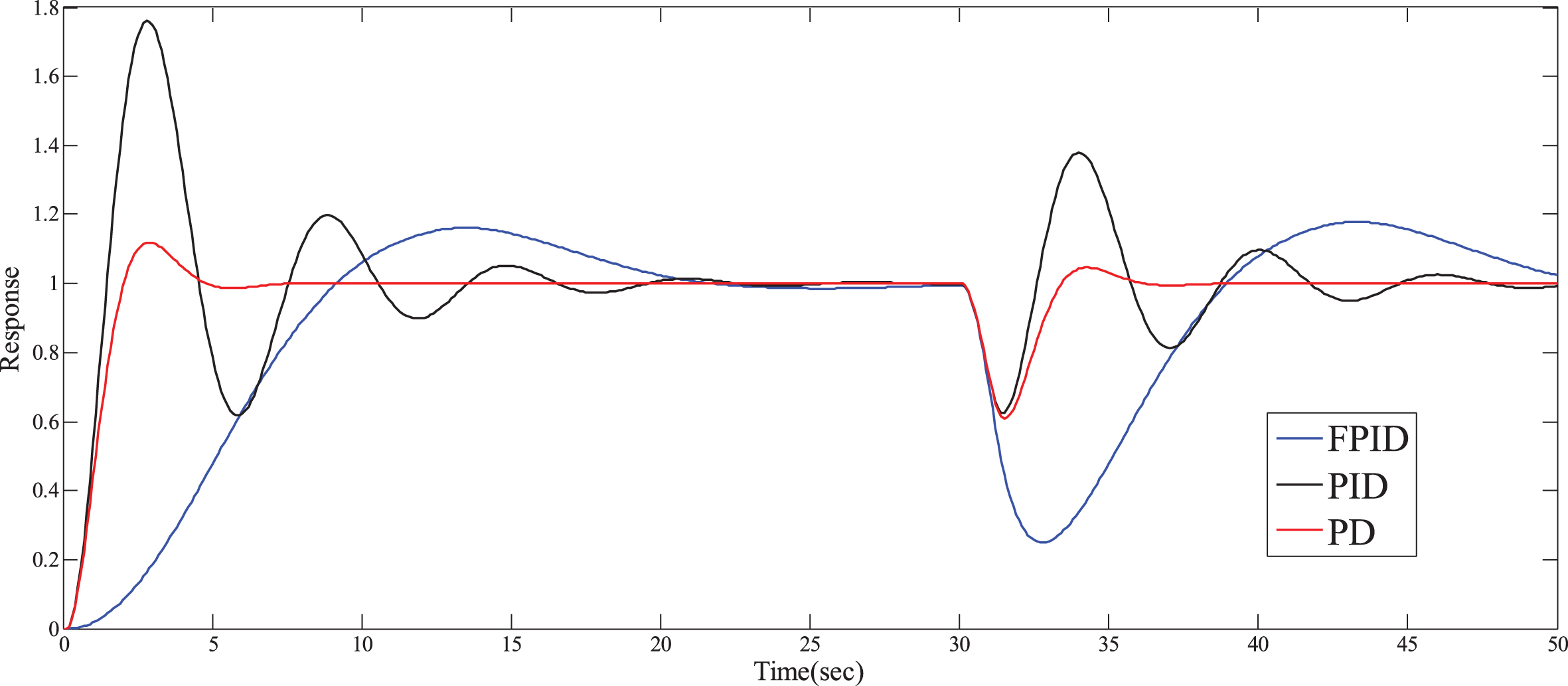
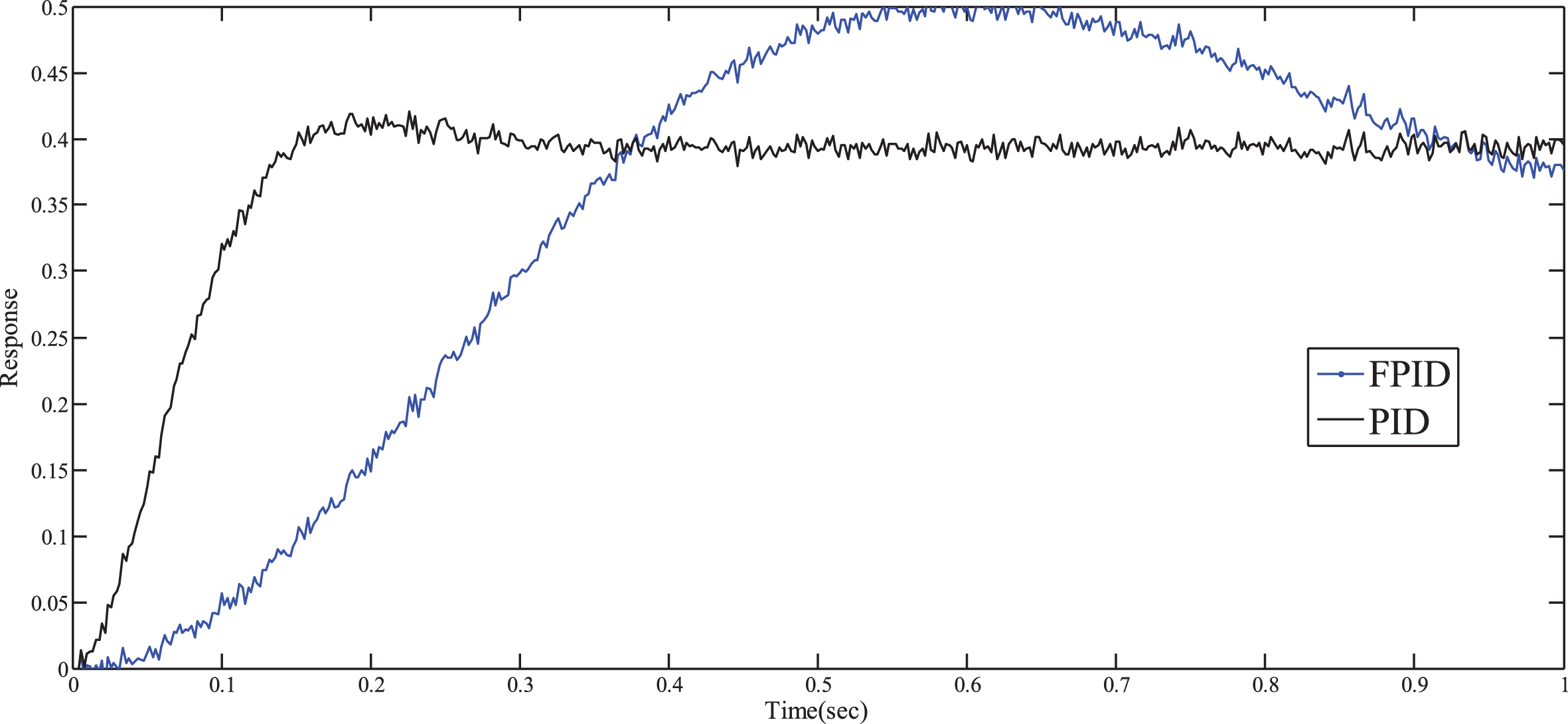
Responses of (23) with θ d = 0.1 for FPID, PID and PD controllers.
Responses of (23) withθ d = 0.15 for IT2-FPD, IT2-GFPD, IT2-ZFPD controllers.
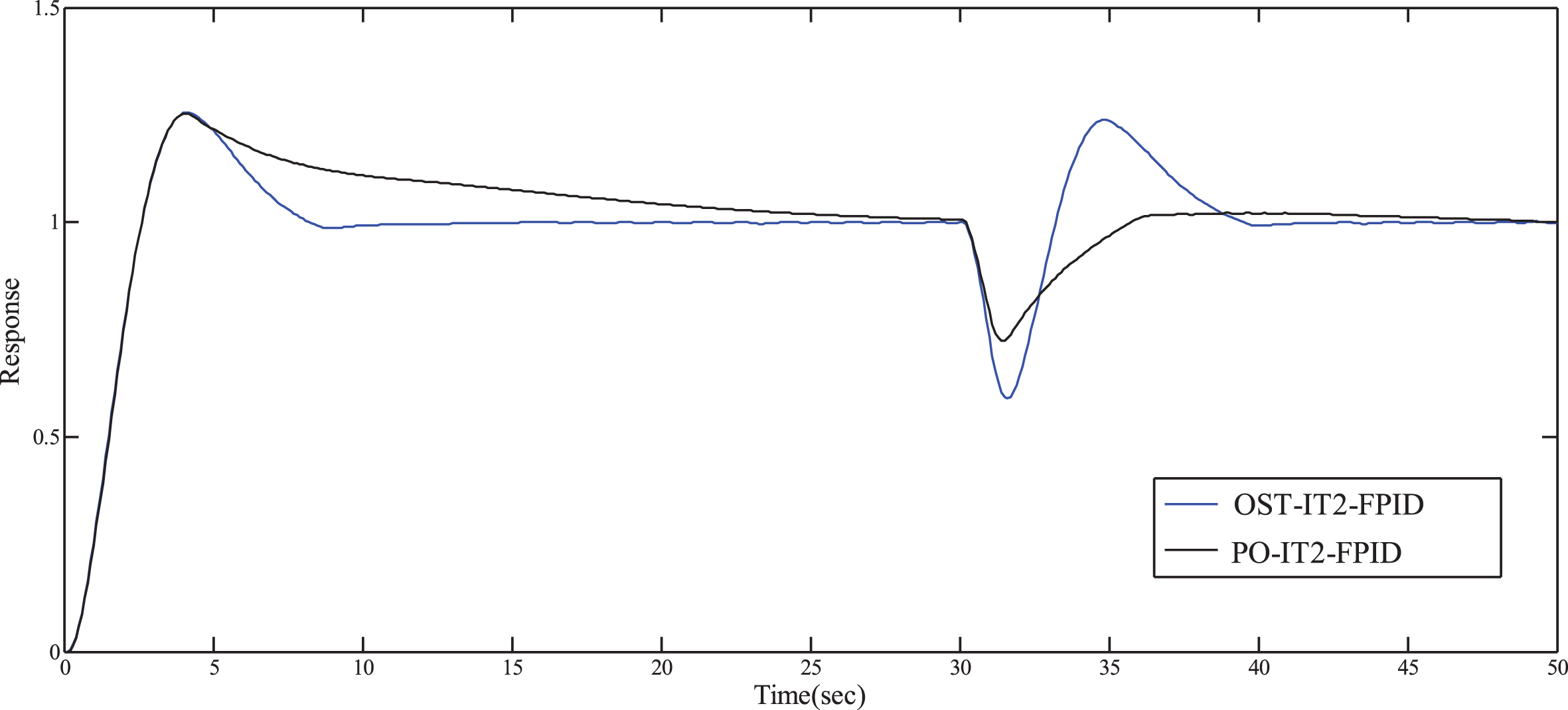
Responses of (23) with θ d = 0.15 for OST-IT2-FPID and PO-IT2-FPID controller.
Responses of (23) with θ d = 0.15 for FPID, PID and PD controllers.
Responses of (23) for IT2-GFPD, IT2-FPD and IT2-ZFPD in presence of measurement noise.
Responses of (23) for PO-IT2-FPID and OST-IT2-FPID in presence of measurement noise.

Responses of (23) for FPID and PID in presence of measurement noise.
Responses of (23) for PD, FPD, FPID, IT2-FPD, IT2-GFPD controllers with changing reference.
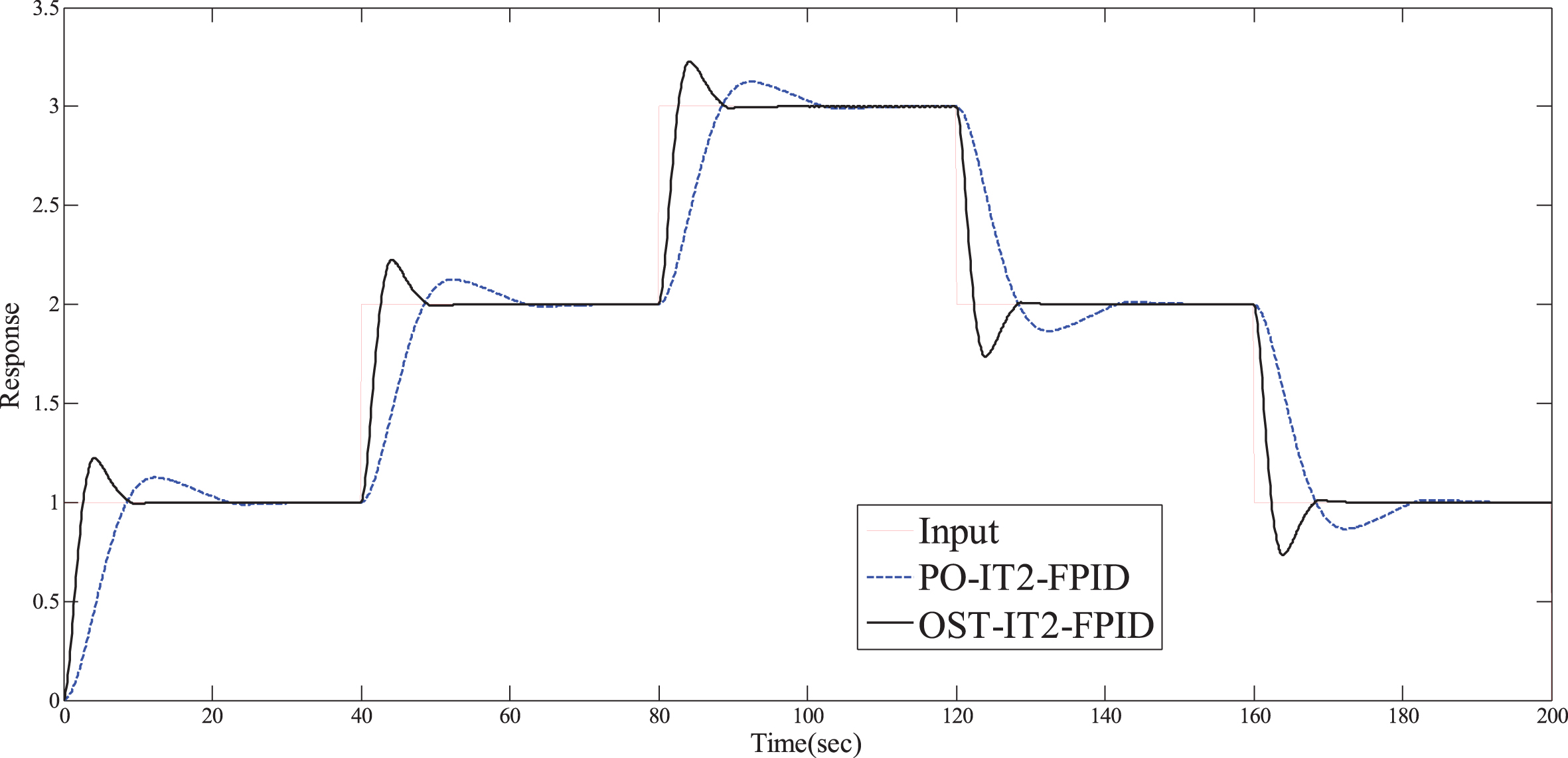
Responses of (23) for PO-IT2-FPID, OST-IT2-FPID controllers with changing reference.
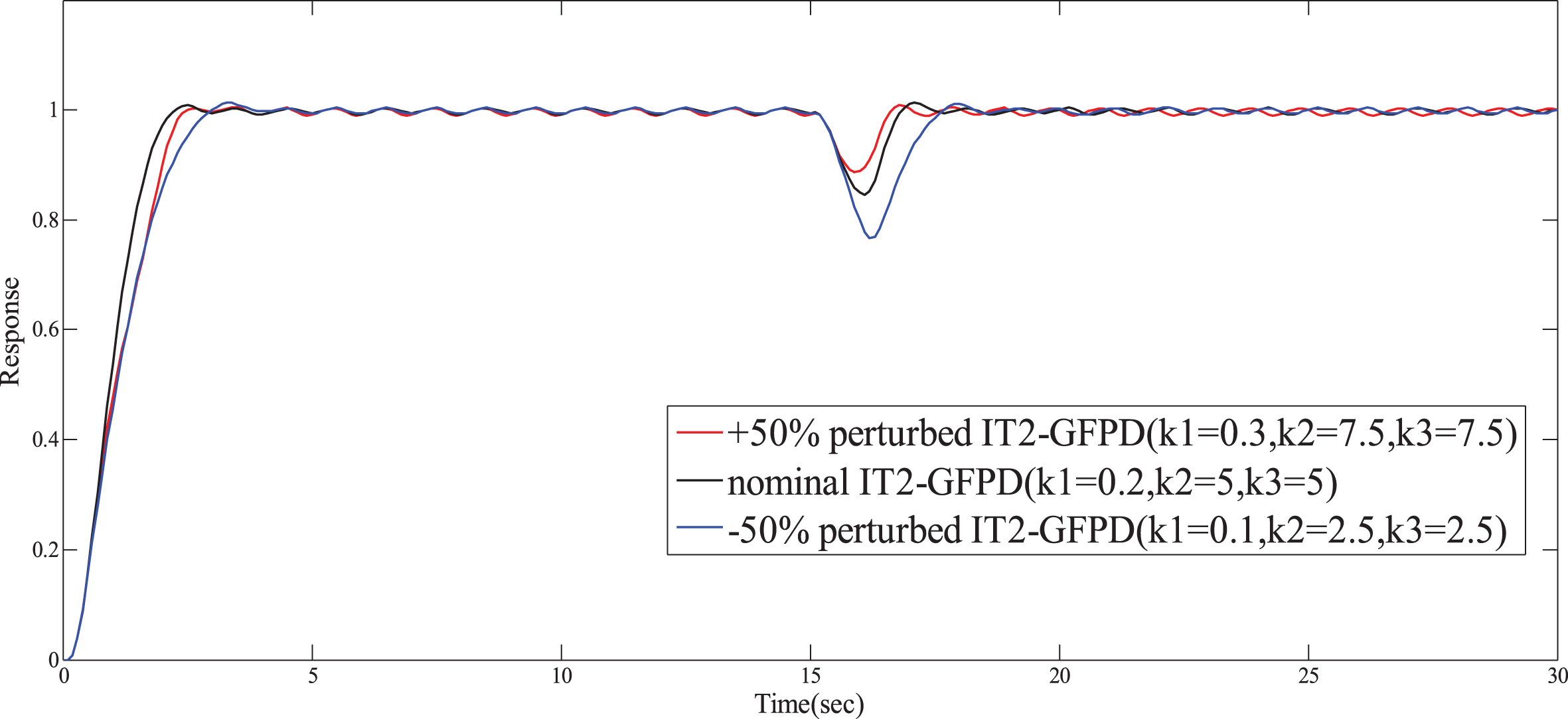
Responses of (23) for IT2-GFPD with±50% perturbations in k1, k2 and k3 from their nominal values.
Simulation results of (23) with noise
Simulation results of (23) for changing reference
In our simulation study, we also consider the following non-linear model,
Simulation results of (24) with step input and load disturbance
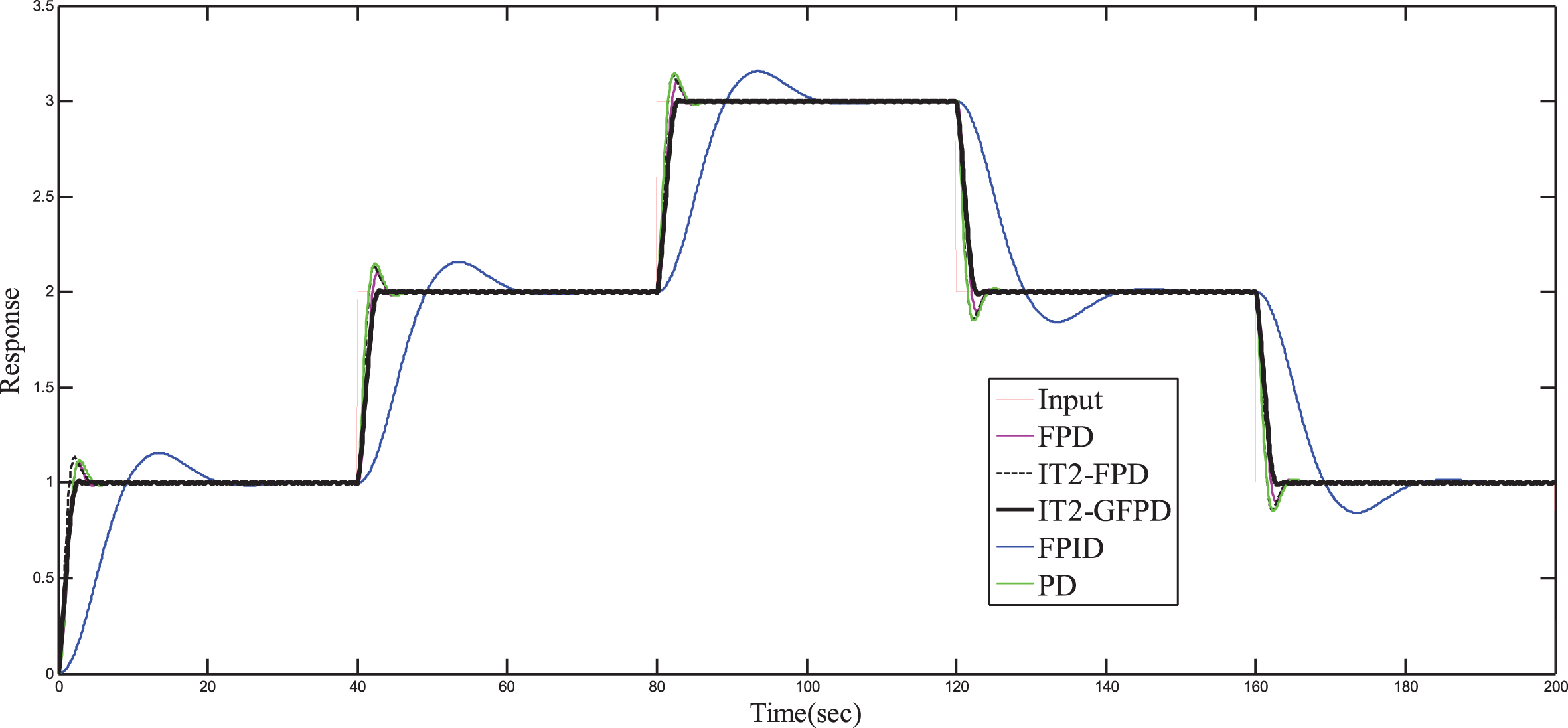
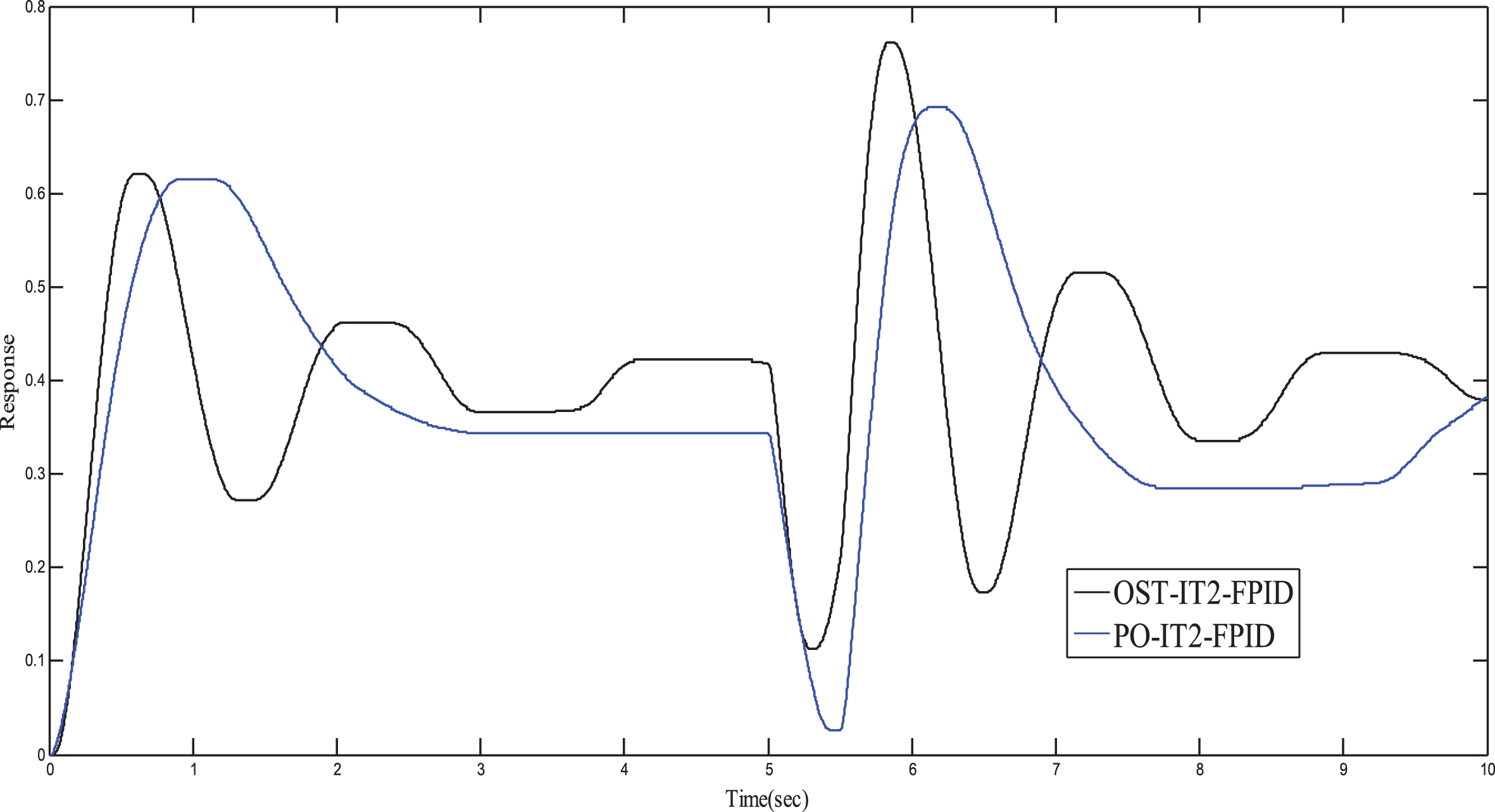
Robustness of our proposed IT2-GFPD is tested on the above non-linear model even with 50 % perturbation in its dead-time (θ d ) using the same set of controller settings. Responses of PID, IT2-GFPD, IT2-FPD, IT2-ZFPD [31], OST-IT2-FPID [32] and PO-IT2-FPID [35] for the non-linear system in (24) with θ d = 0.1 are depicted in Figs. 12a, and 12b, and the performance comparison is provided in Table 5. Performance study is also observed with changing references. Responses in Figs. 13a and 13b, and the performance indices in Table 6 reveal that the proposed controller is superior compared to PD, FPID, type-1 fuzzy PD (FPD), IT2-FPD, IT2-ZFPD [31], OST-IT2-FPID [32], and PO-IT2-FPID [35].

Responses of (24) for IT2-FPD, IT2-GFPD, IT2-ZFPD, PID controllers.
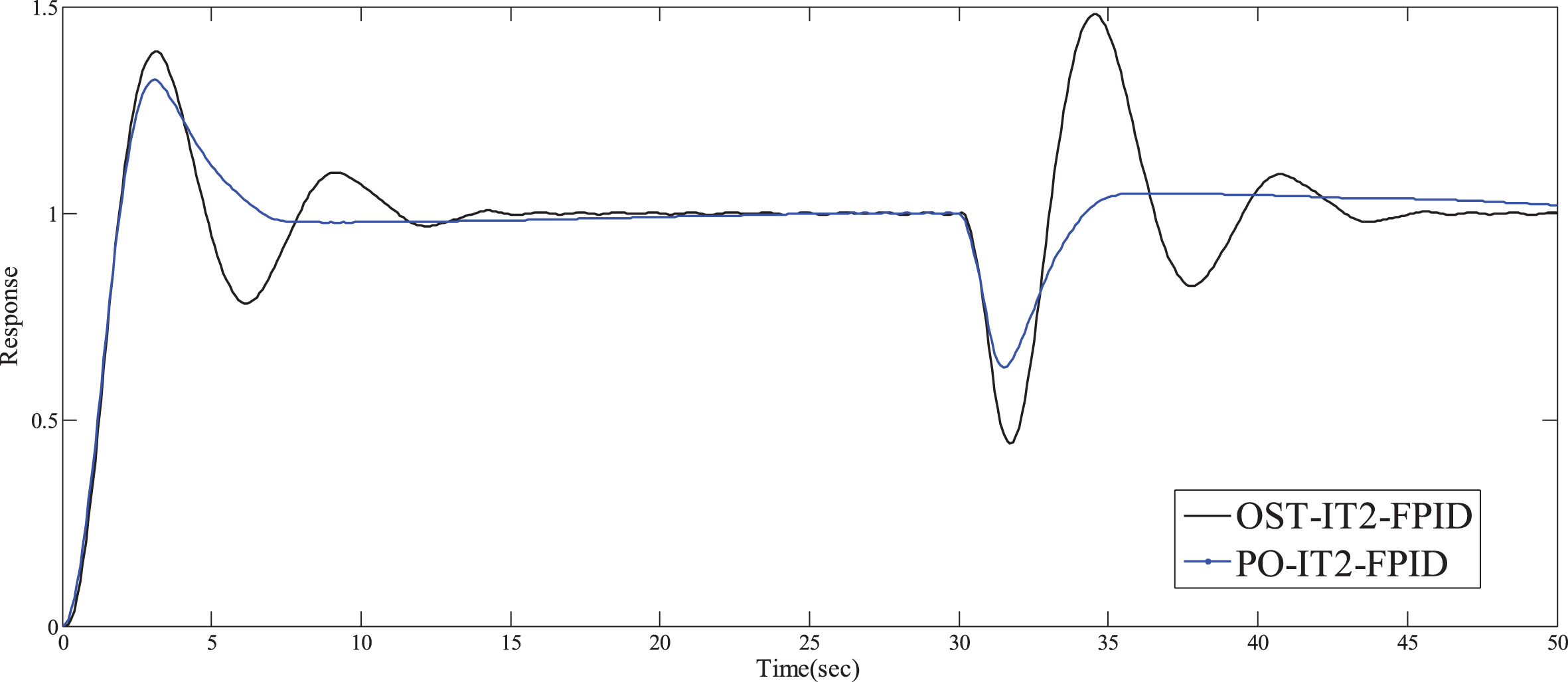
Responses of (24) with OST-IT2-FPID and PO-IT2-FPID controller.
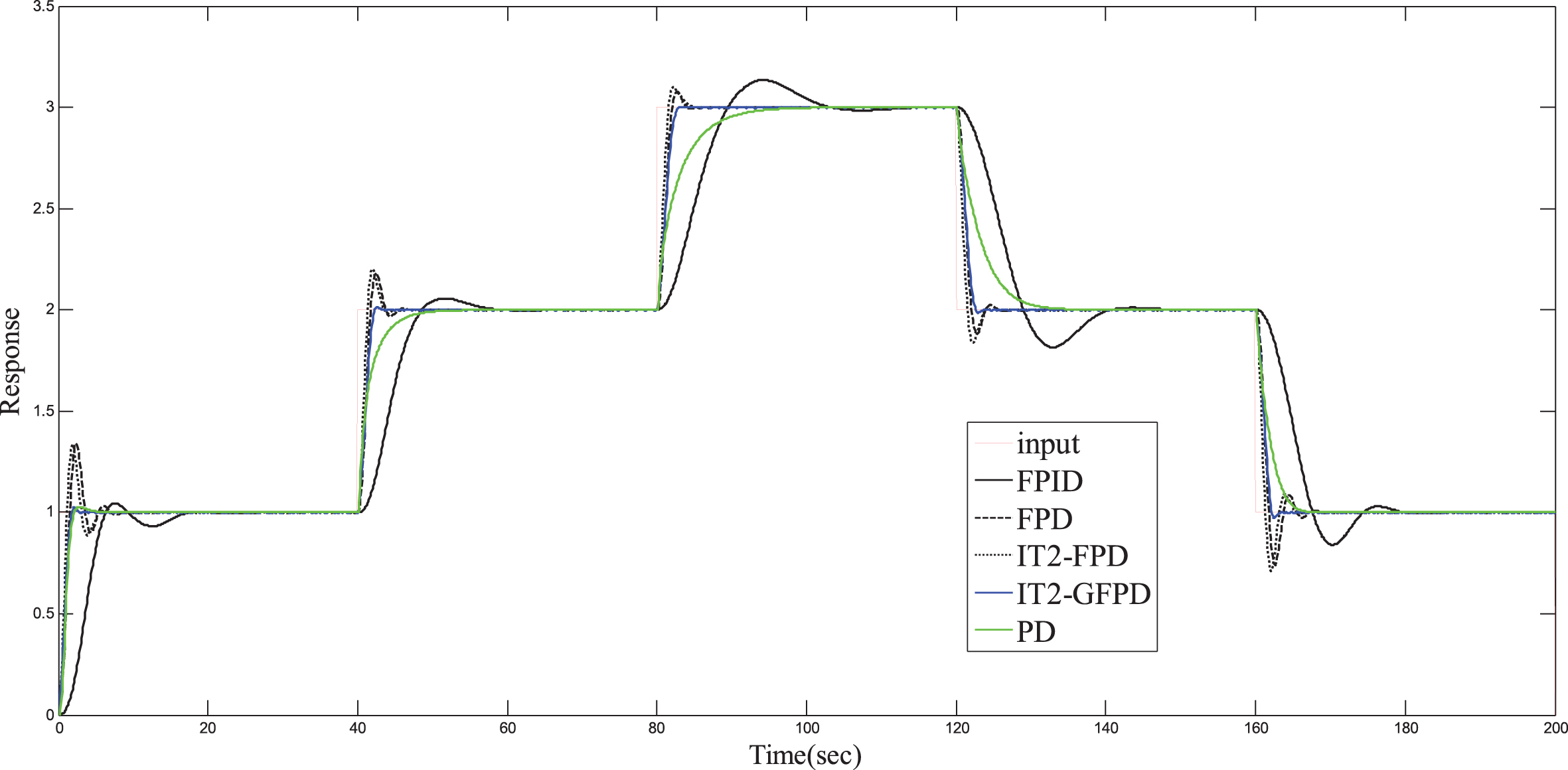
Responses of (24) for PD, FPD, FPID, IT2-FPD, IT2-GFPD controllers with changing reference.
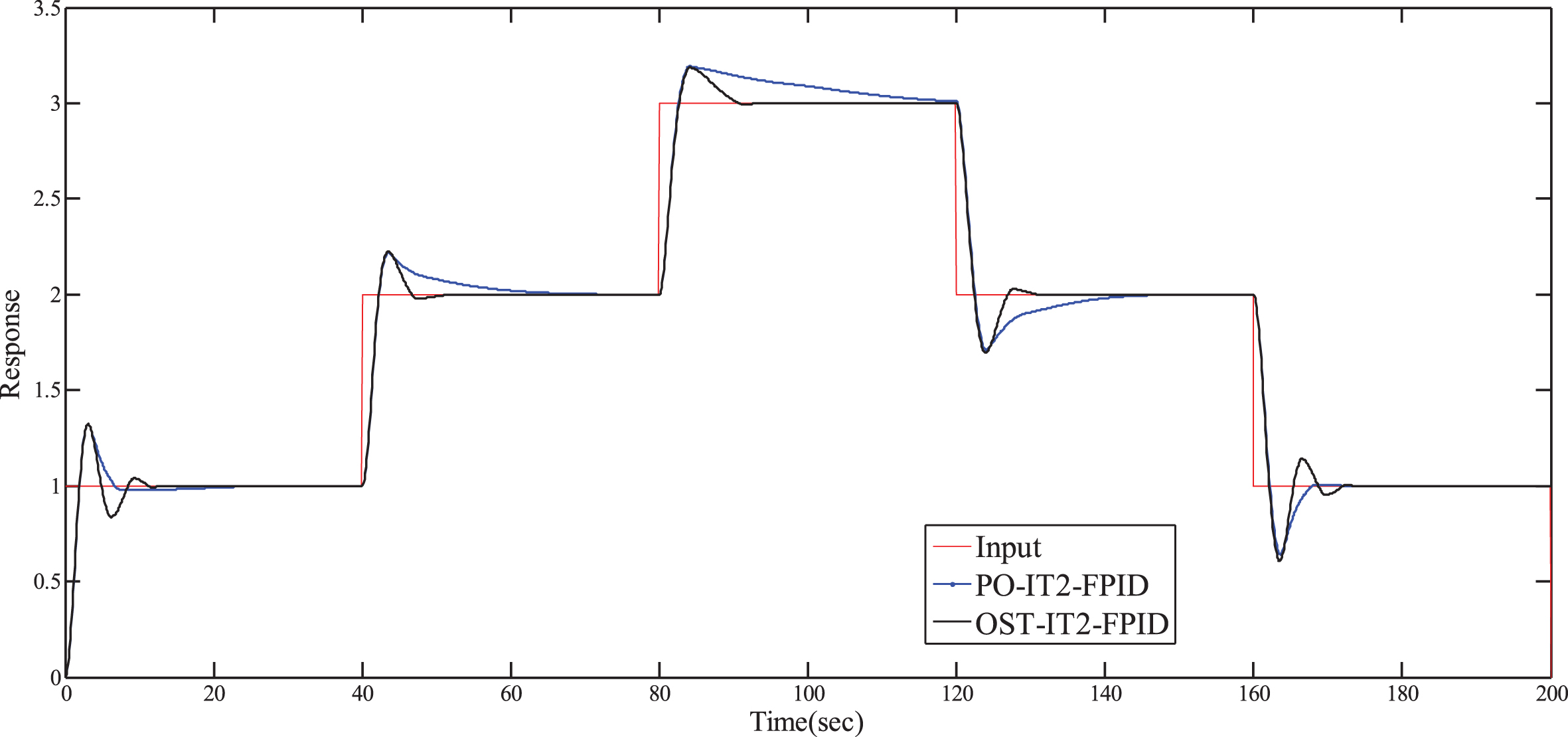
Responses of (24) for PO-IT2-FPID, OST-IT2-FPID controllers with changing reference.
Simulation results of (24) for changing reference
Effectiveness of the proposed IT2-GFPD is also experimentally verified on a DC servo position control system, SRV02 by Quanser, Canada [23] shown in Fig. 14. SRV02 incorporates high efficiency low inductance Faulhaber Coreless DC Motor. With the help of QUARC and MATLAB-Simulink in the PC and the data acquisition device, Quanser Q2-USB, reported controllers are implemented on SRV02 [23] for their performance evaluation. Observe that, SRV02 servo position control system is identified as a first-order integrating plus dead-time (FOIPD) model as derived in Section 4.

Servo system, SRV02.

Experimental setup with SRV02.
Set point tracking and load regulation responses of different controllers are plotted in Fig. 15 and related performance indices are given in Table 7. Performance of SRV02 is also studied for PID, FPID, IT2-GFPD, IT2-FPD, IT2-ZFPD [31], PO-IT2-FPID [35], OST-IT2-FPID [32], FPID and PID in presence of measurement noise (noise power 0.00001). The responses of SRV02 under noise are shown in Fig. 16 and the corresponding performance indices are given in Table 8. Based on the responses and performance indices it can clearly be justified that the proposed IT2-GFPD is capable to provide enhanced close-loop response under model uncertainty and in presence of measurement noise compared to conventional Type-2 PD (IT2-FPD), PO-IT2-FPID [35] and OST-IT2-FPID [32], FPID, and PID controllers.
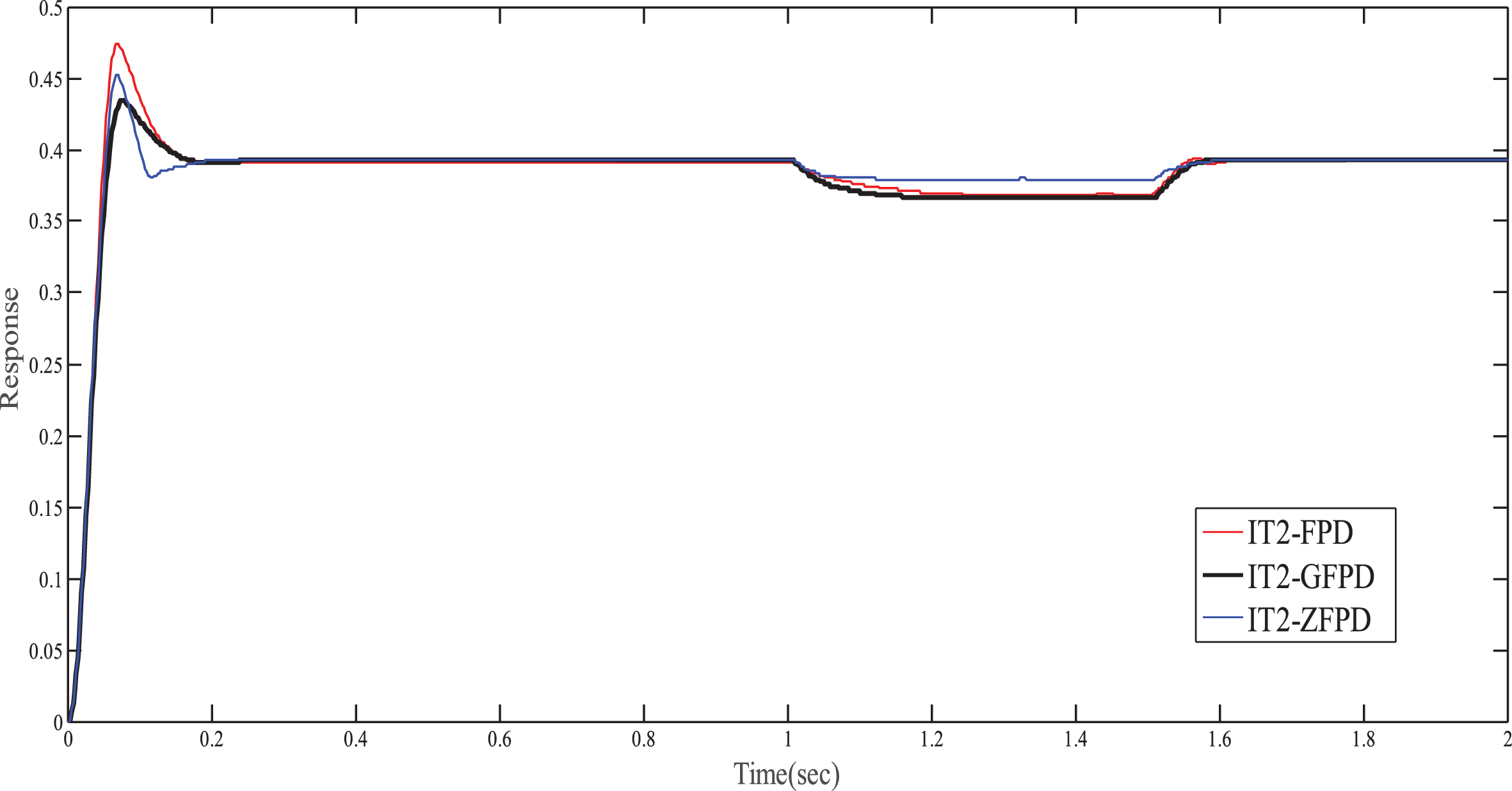
Responses of SRV02 for IT2-FPD, IT2-GFPD, and IT2-ZFPD controllers.
Responses of SRV02 for PO-IT2-FPID and OST-IT2-FPID controllers.

Responses of SRV02 for FPID and PID controllers.
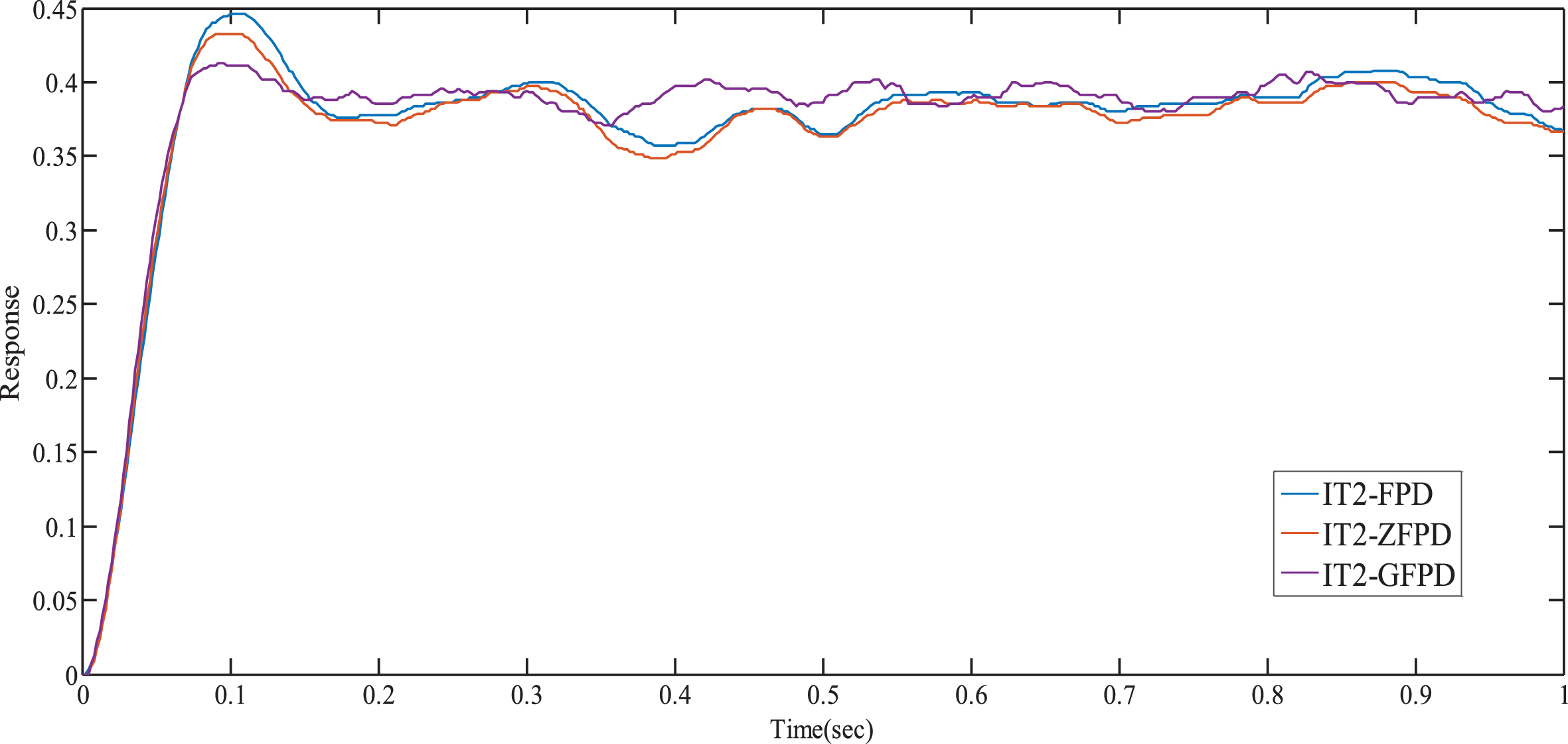
Responses of SRV02 with noise for IT2-GFPD, IT2-FPD, and IT2-ZFPD controllers.
Responses of SRV02 with noise for PO-IT2-FPID and OST-IT2-FPID controllers.
Responses of SRV02 with noise for PID and FPID controllers.
Performance comparison for SRV02
Results of Quanser SRV02 under noise power 10–5
Observe that, the DC servo system is modeled as a linear system, neglecting the nonlinearity effect caused by backlash and nonlinear friction, which are difficult to model. But for high performance servo system, these nonlinear factors cannot be neglected. Hence, desired performance cannot be achieved under conventional (fuzzy or non-fuzzy) controllers with fixed settings. For such reasons adaptive controllers and particularly adaptive fuzzy controllers are mostly suggested in the literature. Furthermore, Interval Type-2 fuzzy controllers (IT2-FLCs) are found to exhibit superior performances than Type-1 fuzzy controllers and other conventional controllers in case of model uncertainty and noisy environment. As a result, the IT2-FLC with online adaptive scaling factors has made our proposed (IT2-GFPD) controller to perform superior than PID, FPID, IT2-FPD, PO-IT2-FPID controllers as demonstrated above.
In this study, an online gain adaptive interval type-2 fuzzy PD controller (IT2-GFPD) has been proposed. The rule-base of our IT2-GFPD has been designed based on the Lyapunov stability analysis approach. Effectiveness of the proposed controller has been tested through simulation experiments on both linear and non-linear integrating plus dead-time systems as well as real-time implementation on a practical DC servo system (SRV02). Performance of the IT2-GFPD has been compared with conventional (PD and PID) and fuzzy (type-1 and type-2) controllers with respect to various performance indices. Superior performance of our IT2-GFPD has been observed than other reported controllers. The designed IT2-GFPD controller has been found to be quite robust with model uncertainties and in presence of measurement noise compared to conventional, Z-slicing type-2 fuzzy controller, type-2 peak observer based controller and online self-tuning type-2 fuzzy PID controller reported in the literature.