
Abstract
In view of the situation that tasks or activities in the GERT model may have multiple realizations, this paper explores the time dependence of each repeated execution node under the condition of fuzzy information, and studies the characteristics of the z-tag fuzzy GERT model and its analytic algorithm. Firstly, the F-GERT model related to the number of executions of activities is defined, and the simplified rules, related properties and theorems of the network model are examined. Secondly, solving algorithm, conditional moment generating function and process arrival time of the F-GERT model for repeated execution time are studied. Finally, the application of F-GERT queuing system based on element execution time in weapon equipment management is discussed. The feasibility and effectiveness of the model and algorithm are verified by the practical application of the project.
Keywords
Introduction
The GERT (Graphical Evaluation Review Technique) was proposed by Pritsken of the United States in 1966 when he was studying the final launch time of the Apollo system, which could reflect the relationship between various random variables [1–4]. In terms of theory, in 1973, Whitehouse, G.E. studied “Systems Analysis and Design Using Network Techniques” [5], and in 1976, Moore, L.J. and Clayton, E.R. further studied the actual application and simulation of GERT in their “GERT Modeling and Simulation –Fundamentals and Applications” [6]. In 1977, Pritsker, A.A.B., further developed and proposed Q-GERT in “Modeling and Analysis Using Q-GERT work” [7]. Later, Phillips, D.T.’s “Fundamentals of Network Analysis” [8], Banks, j. and Carson, J.S. “discretions-event System Simulation” (1984), and Law, A.M. and Kelton, W.D “Simulation Modeling and Analysis” (1982) continued to improve the theory. In 1966, Pritsker, A.A.B., and Happ.W. “Graphical Evaluation and Review Technique, Part 1” [11], “Part 2” [12] and “Part 3” [13] applied GERT method to the study of practical spatial problems. The GERT model can transform the complex system into the random network model with simple structure through logical nodes and branches. It can not only give the random network graph of the system, but also do not need to analyze the given complex system in the form of recursion. Therefore, compared with the CPM and PERT proposed before, the GERT model is more widely applied. Besides space research, GERT model are also widely applied in the fields of the costs and expenses management [14–19], industrial chain value appreciation [20–25], project risk management [26–31], product development, manufacture and improvement plan [32, 33], maintenance and reliability management research [34–41] and GERT model computer algorithm [42–45]. It has been a powerful tool for processing the classical probability network relationships.
To sum up, GERT model can not only study probabilistic uncertainty, but also non-probabilistic uncertainty, such as fuzzy uncertainty and grey uncertainty. However, the study on the improbability uncertain GERT model does not involve the situation that some activities or nodes in the GERT model may be repeated many times. For example, in the manuscript review system of a journal, the editor can ask the author to withdraw the revision according to the quality of the submitted article and the quality of the revision. Then, the revision in the manuscript review process may be executed once or several times. Of course, the revised manuscript review time also obeys a certain probability distribution. If the time of retreat obeys certain fuzzy distribution, the problem we should pay attention to is to the average time from reviewing to retreat for the first time, the average time for the retreat the second time, or the average time for the final rejection. Of course, the probability of these actions is preferred. Z-tag GERT model can explore time dependencies in each repeat node, and calculate the final probability of each node, and at the same time represent the probability or the uncertainty of the time in various nodes with fuzzy uncertainty.
The management of weapons and equipment is greatly affected by various random conditions, and there are many unpredictable factors. Therefore, in the weapon equipment management system, a reasonable assumption is that some variables are uncertain random variables, and uncertainty distribution can be calculated through probability density function. At the same time, most weapons and equipment can continue to be used through maintenance, that is to say, there are a large number of repetitive implementation nodes in the process of weapon and equipment management. In view of the randomness, uncertainty and repeatability of the task activities of the weapon management system, a fuzzy z-tag GERT model is proposed in this paper. First, through in-depth analysis of GERT characteristics and its analytical algorithm, the simplified rules, related properties and theorems of fuzzy GERT with repeated execution characteristics are studied. Secondly, the paper analyzes and designs the solution idea of fuzzy GERT with the characteristics of repeated execution, and studies its algorithm, conditional moment generating function and process arrival time. Finally, the application of F-GERT model queuing system in weapon equipment management verifies the feasibility and effectiveness of the model and algorithm. This model can solve the following three problems: How to construct and simplify the fuzzy GERT model with repeated execution characteristics and study its relevant properties, so as to solve practical problems through model construction. How to solve the fuzzy GERT model with repeated execution characteristics, so that the model and parameters can be simulated and realized quickly and efficiently in the application process. How to apply the fuzzy GERT model with repeated execution characteristics in practical problems to provide a theoretical analysis platform for relevant studies.
The study is organized as following. The second part lays the foundation for the construction of the subsequent F-GERT model for the composition of the GERT and its analysis algorithm. The third part introduces in detail the definition of F-GERT model with fuzzy information and how to streamline the network model. The fourth part studies the idea and algorithm of solving F-GERT network with repeated execution time of elements, and analyzes the construction of F-GERT conditional moment generating function and the calculation of process arrival time on this basis. The fifth part demonstrates the application scope and feasibility of the model through the application of F-GERT for repeated execution time in weapon equipment management. The sixth part puts forward the prospect of follow-up research built on the summary of the paper.
GERT model
Composition of GERT model
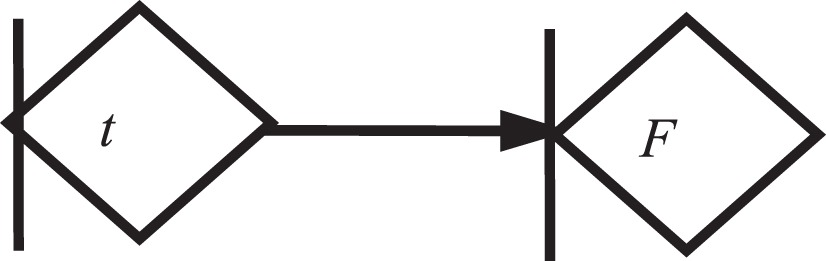
GERT model generally consists of three elements, namely, arrow, node and flow. A arrow is a directed line from one node to the other, which is usually used to indicate activity. Node is the connection point of the arrow line, which represents the logical relationship between the arrow lines. The flow reflects the quantitative restriction relation between the parameters and nodes (or arrows) in the network. The basic building blocks of GERT model are shown in Fig. 1.

Diagram of the basic building blocks of GERT.
In Fig.1,
U—the flow from node i to node j;
Flow is the reflection of quantitative parameters in the network and the mutual quantitative restriction relationship between nodes (or branches), such as working time, cost, various resources consumed, benefit and realization probability. The logical nodes of GERT model include input and output. On the input side, there are three logical relations of “exclusive or” (x or), “or” and “and”.
In the GERT model, if P ij is the realization probability from node i to node j, and the time probability density to complete this flow is f (t ij ) or the probability distribution is p (t ij ), then the moment generating function of the random variable is defined as follows.
Where S is any real number.
The transfer function from node i to node j satisfies
Thus, for a network G with two parameters Series structure: W
iz
(s) = W
ij
(s) · W
jk
(s) ⋯ W
yz
(s) Parallel structure: Self-loop structure: W
ij
(s) = M
ij
(s)
From the above statement, it can be known that the equivalent transfer functions of series, parallel and self-loop structures in the GERT model are completely consistent with the linear system described in the signal flow diagram, and the GERT model is composed of these three forms, thus laying the theoretical foundation for solving the analytic solution of the GERT model.
In the signal flow diagram theory, since the characteristic expression of the closed signal flow diagram must be equal to 0, let H represent the characteristic value of the closed network with W parameters, then there is
Where,
There is
According to the characteristics of moment generating function, when s = 0, there is
According to Mason’s formula, the equivalent mother function of moments is
According to the basic properties of the moment generating function, the value of the n-order derivative of the moment generating function at s = 0 is the n-order origin moment of the random variable. Therefore, there is
It can be seen that for any GERT model, the W function of each activity can be defined first, and the equivalent transfer function of the network
Definition and simplification rules of F-GERT model
The GERT theory based on the classical probability description has been relatively mature, and its application range is wide as well. It is a powerful tool to deal with the classical probability network relationship. However, in the real world, in addition to the uncertainty of probability, there are also a large number of non-probabilistic uncertainties, such as fuzzy uncertainty and grey uncertainty. For example, in a random network of rocket launch and repair problems, when the experience of experts is used to estimate the repair time after the successful launch of the rocket, the reuse time of the repaired rocket, and the repair time of the failed rocket, it seems that the classic GERT is no longer applicable for the fact that this kind of random network is featured as fuzzy uncertainty information. Therefore, in this section, a new F-GERT (Fuzzy of Graphical Evaluation Review Technique) model considering fuzzy information is designed for the case of Fuzzy Uncertain Information in the study of stochastic network. The simplification rules of F-GERT with fuzzy information are studied by using the principle of signal flow graph.
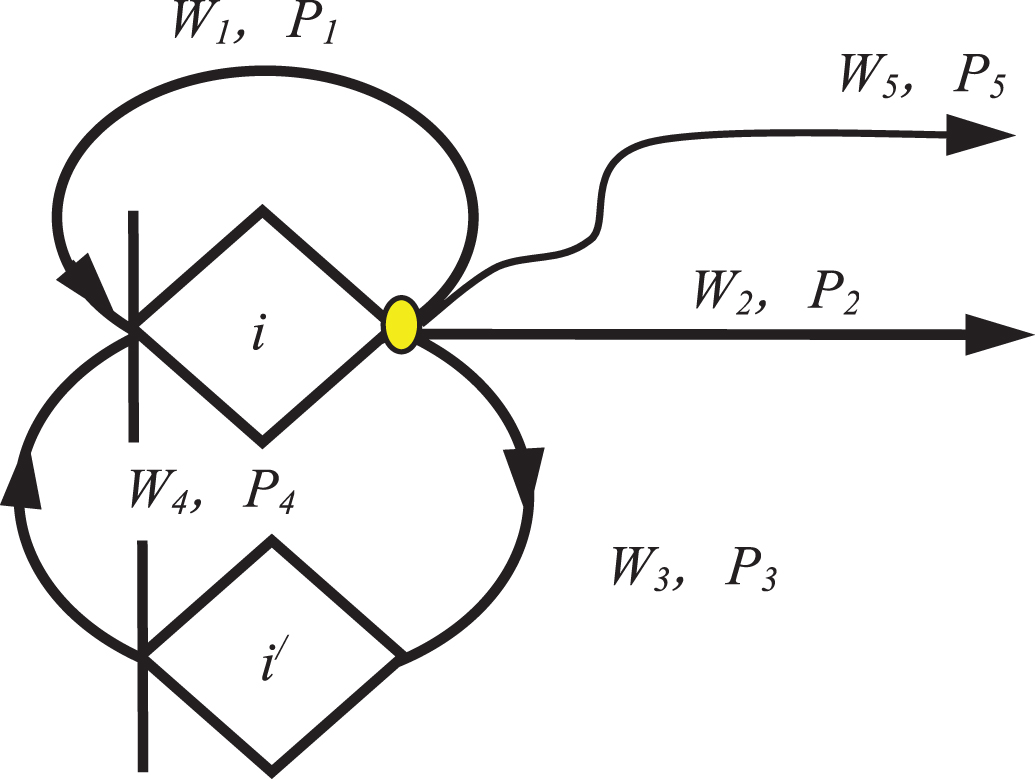
In the F-GERT model, the number of repeated executions is caused by the self-loop and feedback on the node, so the following definition is given first.

Diagram of feedback network basic unit.
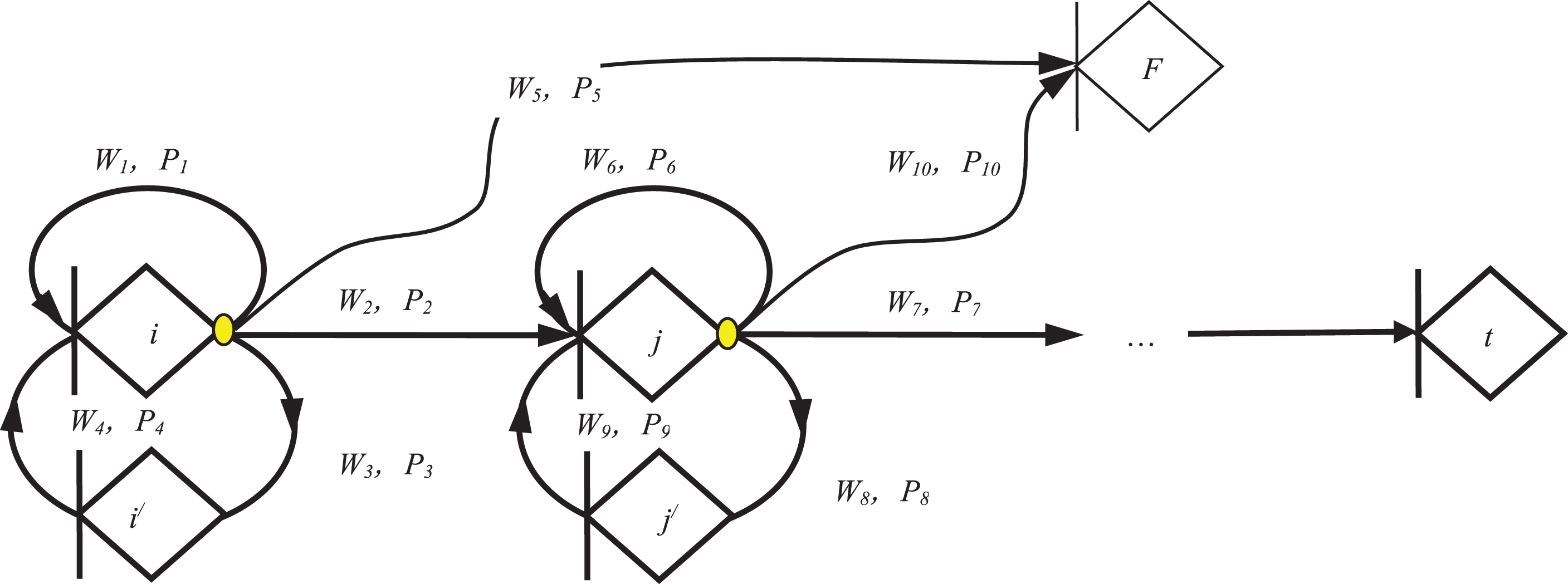
Multiple feedback network.
Multiple feedback progressive network.
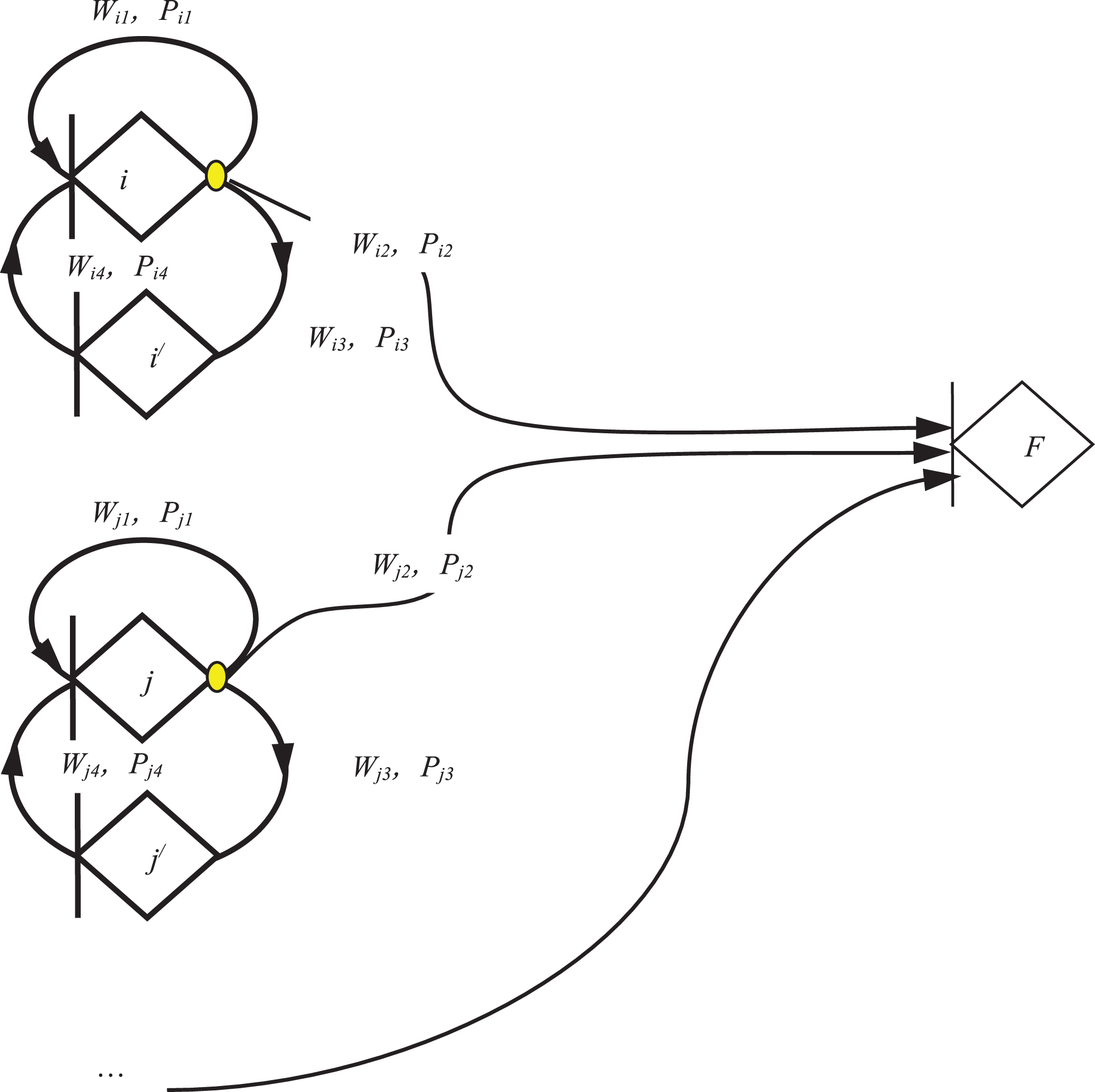
Multiple feedback parallel network.

Multiple feedback hybrid network.
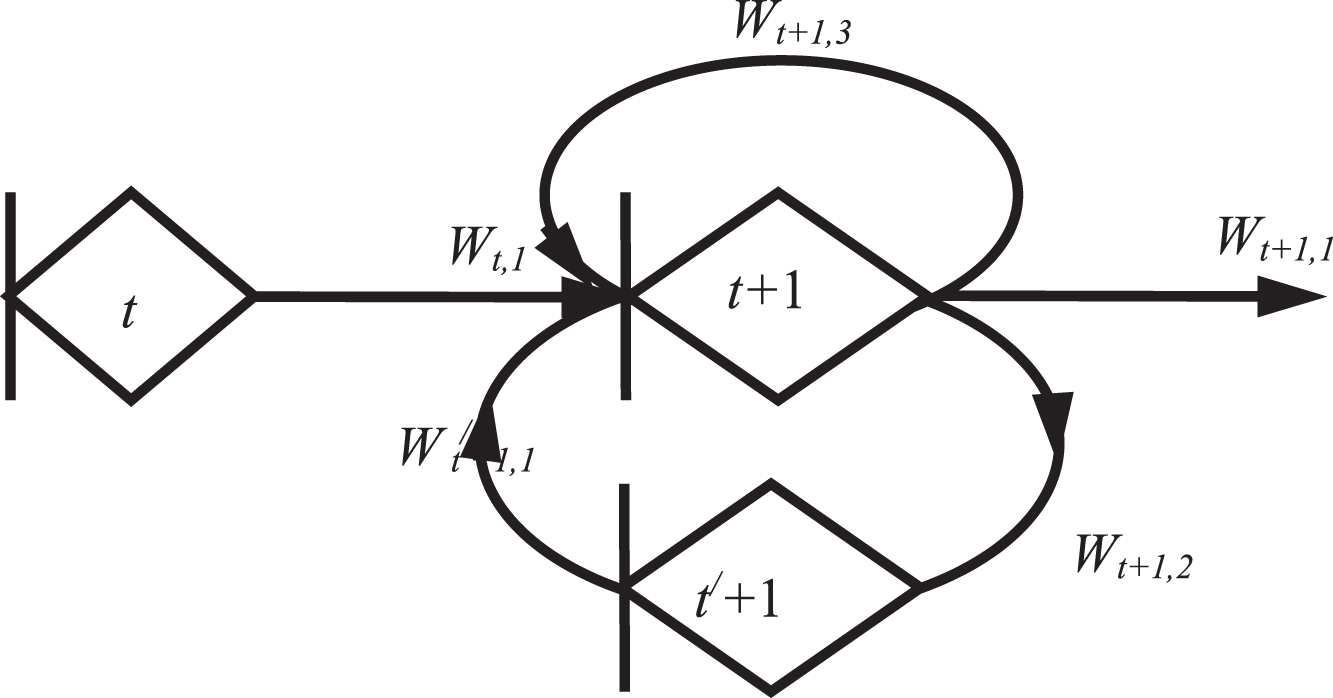
A series structure diagram containing the feedback network basic elements.
A simplified series structure diagram containing the feedback network basic elements.
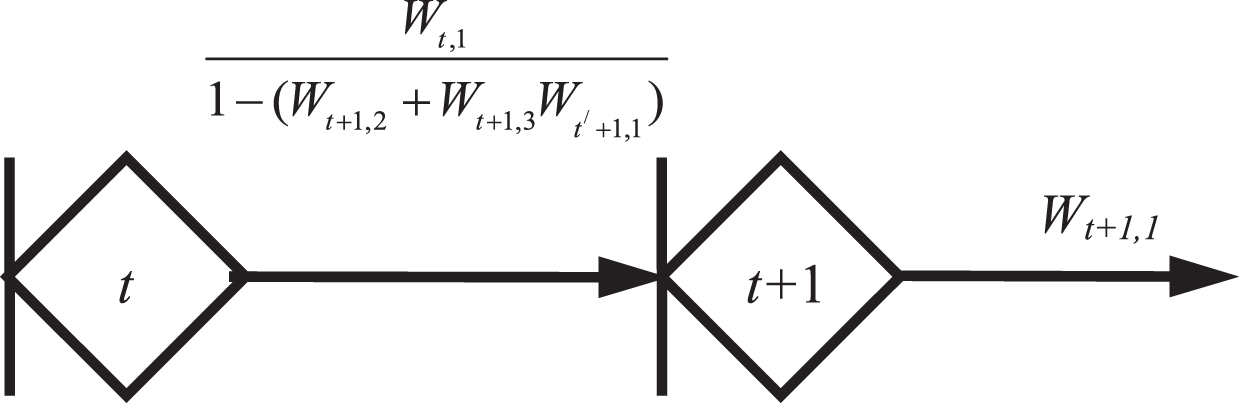
According to the transfer function property of the series structure in the GERT model, the nodes t′ + 1 in the process t + 1 → t′ + 1——t + 1 can be absorbed, and the transfer process can be simplified as t + 1 → t + 1 self-loops, and the transfer function is Wt+1,3Wt′+1,1. Therefore, two parallel self-loops are formed on the nodes t + 1. According to the transfer function property of GERT parallel structure, two self-loops can be merged into one self-loop with the transfer function Wt+1,2 + Wt+1,3Wt′+1,1. For a node with multiple self-loops, inputs and outputs, the transfer function on a self-loop is equivalent to the ratio of the transfer functions of the inputs to the difference between 1 and the transfer functions of the self-loop, and the transfer function of the outputs remain the same. The self-loop on the node t + 1 can be removed and the transfer function of t → t + 1 becomes
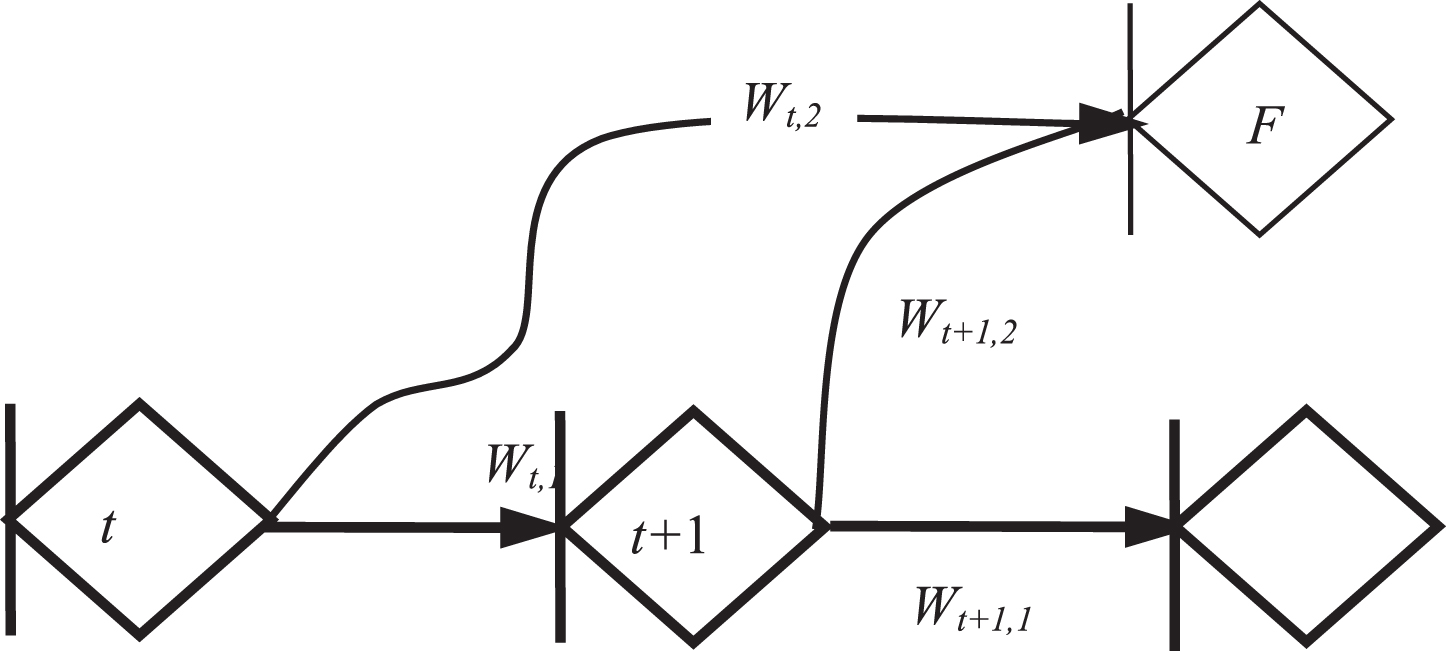
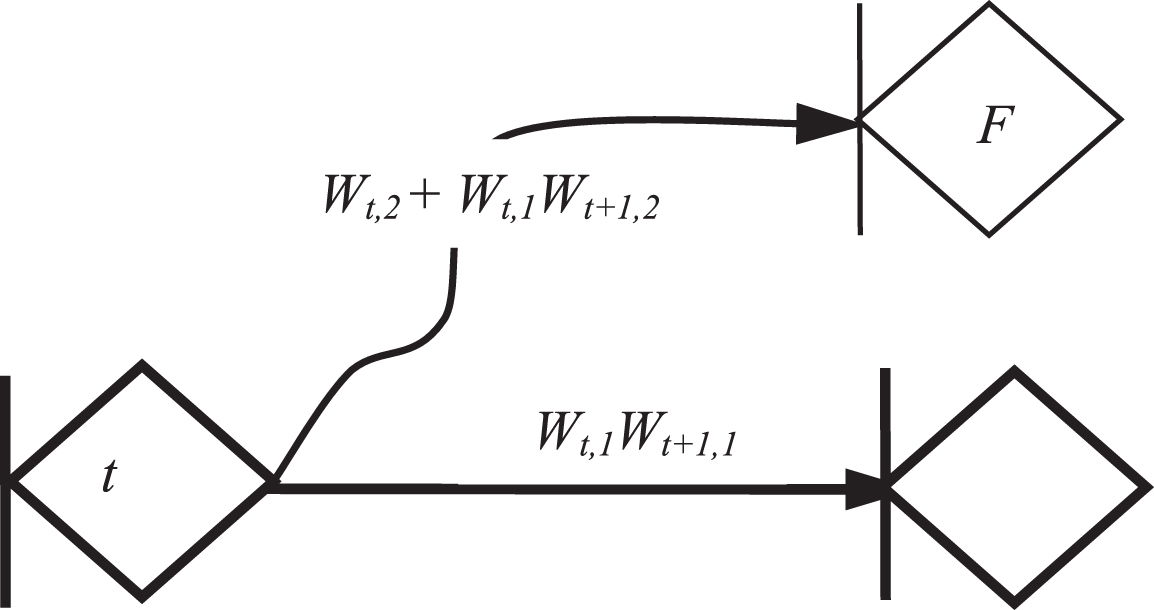
According to the above method, the node t + 1 is moved in reverse along the node t → t + 1, and node t absorb node t + 1. After absorption, the branches from the node t to the node F become two branches, and the transfer branches of various branches are Wt,2, Wt,1Wt+1,2, and Wt,1Wt+1,1. The parallel arrow-line transfer function of GERT model is equal to the sum of the transfer functions of each arrow-line, so the transfer function from node t to node F is converted to Wt,2 + Wt,1Wt+1,2, and Fig. 9 cane be transformed into the structure of Fig. 10.
3-node series network structure.
Simplified 3-node series network structure.
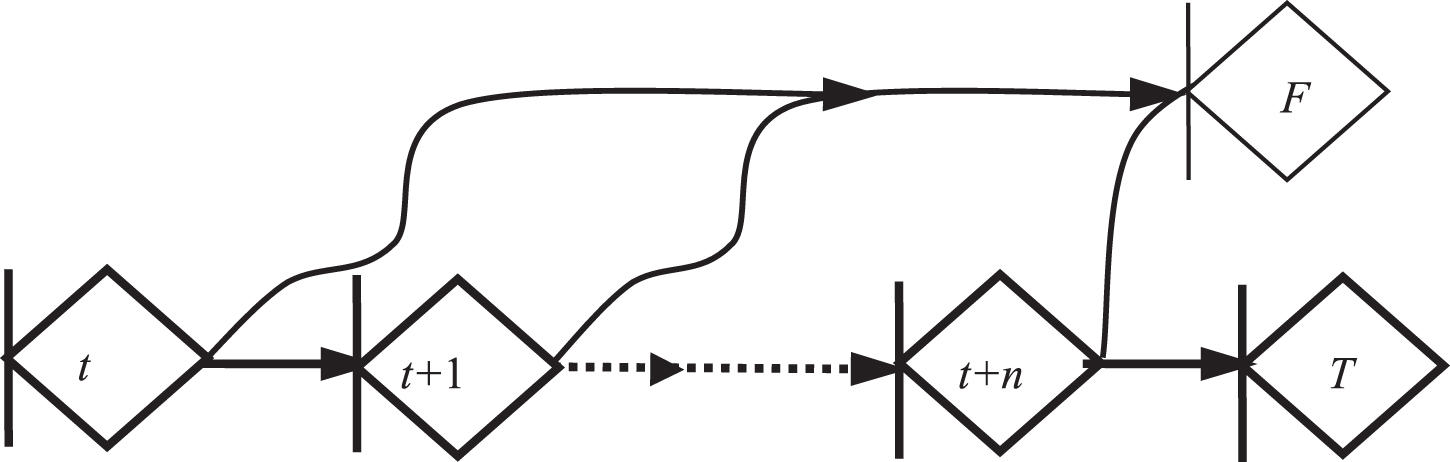
For the network structure with n - k + 1 series nodes in Fig. 11, the network starting from the last node moves in the opposite direction, which can be simplified into the structure diagram as is shown in Fig. 12, where Wt+i,2 is the transfer function of the branch t + i → F (i = 01 ·· ·· ·· n), and Wt+i,1 is the transfer function T = t + n + 1 of the branch t + i → t + i + 1 (i = 01 ·· ·· ·· n).
Multi-node series network structure.

Simplified multi-node series network structure.
The equivalent transfer function of the branch t → F is Wt,2 + Wt,1Wt+1,2 + ·· · + Wt,1Wt+1,1 ·· · Wt+n-1,1Wt+n,2.
The equivalent transfer function of the branch t → T is Wt,1Wt+1,1 ·· · Wt+n-1,1Wt+n,1.
Multiple feedback progression network.
According to Theorem 2, the self-loop on the progressive unit node in Fig. 13 can be simplified to Fig. 14. The equivalent transfer function of the branch t - 1 → t is
Simplified structure of a progressive network with multiple feedbacks.
According to Theorem 3, the nodes t + 1t in Fig. 14 are absorbed t - 1 in sequence, so the structure diagram can be simplified to Fig. 15. According to the equivalent transfer function of simplification principle, the following equation can be obtained: The equivalent transfer function of the branch t - 1 → t + 2 is

Simplified diagram of a network structure with multiple feedbacks.
Network with multiple parallel feedbacks.
Simplified diagram with multiple parallel network feedbacks.
Simplified parallel network structure with multiple feedbacks.
According to Theorem 2, the self-loop on the parallel element node in Fig. 16 can be simplified to Fig. 17. The equivalent transfer function of the branch t → i → F is
According to Theorem 3, the nodes i, j in Fig. 17 are absorbed to t in sequence, so the structure diagram can be simplified to Fig. 18. According to the equivalent transfer function of simplification principle, the equivalent transfer function of t → F is
With the above transformation rules, the construction of the moment generating function of repeated execution times, conditional moment generating function and process time of F-GERT model elements is studied.
In the research of some engineering technology systems and economic management problems, due to the effects of probability branches and feedback loops, a certain part, activity or node in the F-GERT may be implemented many times. Since there is always a positive probability in the F-GERT which makes the process leave the loop and proceed to other nodes, the number of repeated implementations of such local network elements must be limited. In the analysis of actual problems, it is often necessary to analyze the local implementation of the F-GERT model and the relationship between the local and the overall implementation. Therefore, it is necessary to study the fuzzy moment generating function of the execution times of a certain element in the F-GERT and the fuzzy conditional moment generating function under specific conditions. Based on the fuzzy moment generating function of F-GERT elements with repeated execution times, this part studies the fuzzy conditional moment generating function of F-GERT based on z-tag, the fuzzy moment generating function of process time, and their properties and application.
Algorithmic research
In other words, for any distributed fuzzy random variable, if s = 0, then its fuzzy moment generating function is 1. If the fuzzy moment generating functions of each activity in the F-GERT model are set to 1, the fuzzy time parameters of the activity are 0 respectively. For any activity, its fuzzy moment generating function is multiplied by e c (e c is equivalent to the moment generating function of constant 1), while the remaining activities keep the original fuzzy parameter unchanged, which does not change the fuzzy time parameter of the original F-GERT model, and it is equivalent to multiplying the fuzzy time parameter of this activity by 1. In this way, the activity is marked. The following is the solution of the moment generating function and the number of execution times of branches, nodes, and the random network.
Repeated realization probability and conditional moment generating function of F-GERT
In the F-GERT, in addition to the number of executions of nodes (activities), it is also necessary to care about the realization probability and conditional moment generating function when the activities (nodes) are executed a certain number of times. The conditional moment generating function in the F-GERT network refers to the conditional moment generating function corresponding to the W F function under the condition that a certain node (activity) in the network model is executed a certain number of times.
In the F-GERT model, if an unqualified variable z is multiplied by the W F function of an activity in the network, the activity is marked with z or is named after z-marked.
In this case, the equivalent WF function of the network becomes a W
F
function with variable z, that is W
F
(s, z). According to the property of a power series (if the function can be expanded as a power series of variable z, then its expansion formula is unique), the equivalent W
F
function of the network is expanded as a corresponding power series. The equivalent W
F
function marked with z is expressed as the power function of variable z, namely
Where W F (s, z) is the WF generating function of power series, and W F (s|j) is the conditional WF function implemented by j times for the z-marked network.
Obviously, there is
The relationship between the conditional W
F
function and the conditional moment generating function can be determined according to the definition of the WF function, that is,
p (j is the probability of the realization of the network when the Z-marked activity is realized j times, and M
F
(s|j) is the conditional moment generating function of the network when the z-marked activity is realized j times.
In addition, the power series expansion formula of W
F
(s, z) is
Above is the derivation of conditional moment generating functions of fuzzy random networks with only one marker variable. Sometimes, it is necessary to study various relevant cases in which two or more activities of F-GERT models are respectively in their specific conditions, such as the realization of probability or conditional moment generating functions. The W
F
generating function and conditional moment generating function of two activities are considered respectively under their specific conditions. z1 and z2 are marked respectively, then the W
F
generating function implemented by the network is as following.
Where W F (s, z1, z2) is the W F function implemented by z1 activity for i times and by z2 activity for j times.
By extension, when k activities in the F-GERT model are marked with z, the WF generating function is as following.
Its equivalent probability and conditional moment generating function are similar to the equivalent probability and conditional moment generating function of fuzzy random networks with only one marked variable.
Arrival time of repeated execution process of F-GERT
In the analysis of F-GERT model, it is sometimes necessary to know the process time of the first implementation or n implementations of a node or an activity during the execution of the network to further understand the characteristics of the network. In the process of network execution, the time of the first arrival of a node is the time of the first implementation of the node, which can be determined by the corresponding fuzzy moment generating function. If z mark is made for all the activities passing through this node, then the W
F
parent function between the source node and this node can be calculated. The equivalent W
F
function of the process time first realized by this node is the conditional W
F
function W
F
(s|1).
Then the conditional moment mother function of the process is as following.
The first process time is a special case of the n times arrival processes. Under the condition that a given node is realized n times, the moment generating function of the n times arrival process time is as follows.
Application of F-GERT model in weapon equipment management
Weapon and equipment management is an important basis for the generation of military combat effectiveness, and it is also an important task with overall, basic, and regularity in the construction of military equipment. In the management of weapons and equipment, the probability of a certain group of equipment failure, the average maintenance time, the probability of successful maintenance, normal working time, and service life are all very important issues. After successful maintenance of weapons and equipment, you can continue to fight, that is to say, the “battle” state of weapons and equipment can be executed repeatedly. At the same time, the fault type of weapons and equipment is sometimes difficult to determine, and the repair rate will show fuzzy uncertainty characteristics. The F-GERT can solve the management problem of weapons and equipment with fuzzy and uncertain repeated execution times. The following uses radar equipment management as an example to illustrate the feasibility of the model in this paper.
XX prevention and control radar maintenance team is responsible for the maintenance of two XX radar models, and there is another standby radar, so as to put into use when both of them fail. According to relevant statistics, the time interval between the failure of the XX radar and the maintenance time of the workers all obey the negative exponential distribution, so the system is a Markov process both in arrival and service. Since it is difficult to determine the fault type of radar, the maintenance rate μ is fuzzy, or the ratio of arrival rate of radar fault λ to service rate μ is fuzzy. In fact, according to experience, it can be determined that the ratio λ/μ obeys uniform distribution, but the parameters of uniform distribution are fuzzy, that is, λ/μ < 1 = a ∼ F (ρ, ρ + 2) , ρ = (2, 3, 4). In order to avoid the radar failure affecting the combat effectiveness of the equipment, it is necessary to predict the failure time of all radars (2 radars in service and 1 standby radar), as well as the time required for maintenance.
For systems with this limited state, the relationship between the system arrival rate and the service rate is shown in Table 1.
Radar failure rate and maintenance rate in the system
Radar failure rate and maintenance rate in the system
Therefore, the probability of the system going from state i to state i + 1 is pi(i+1) = λ i /(λ i + μ i ) , (i = 0, 1, 2); the probability of the system going from state i to state i - 1 is .
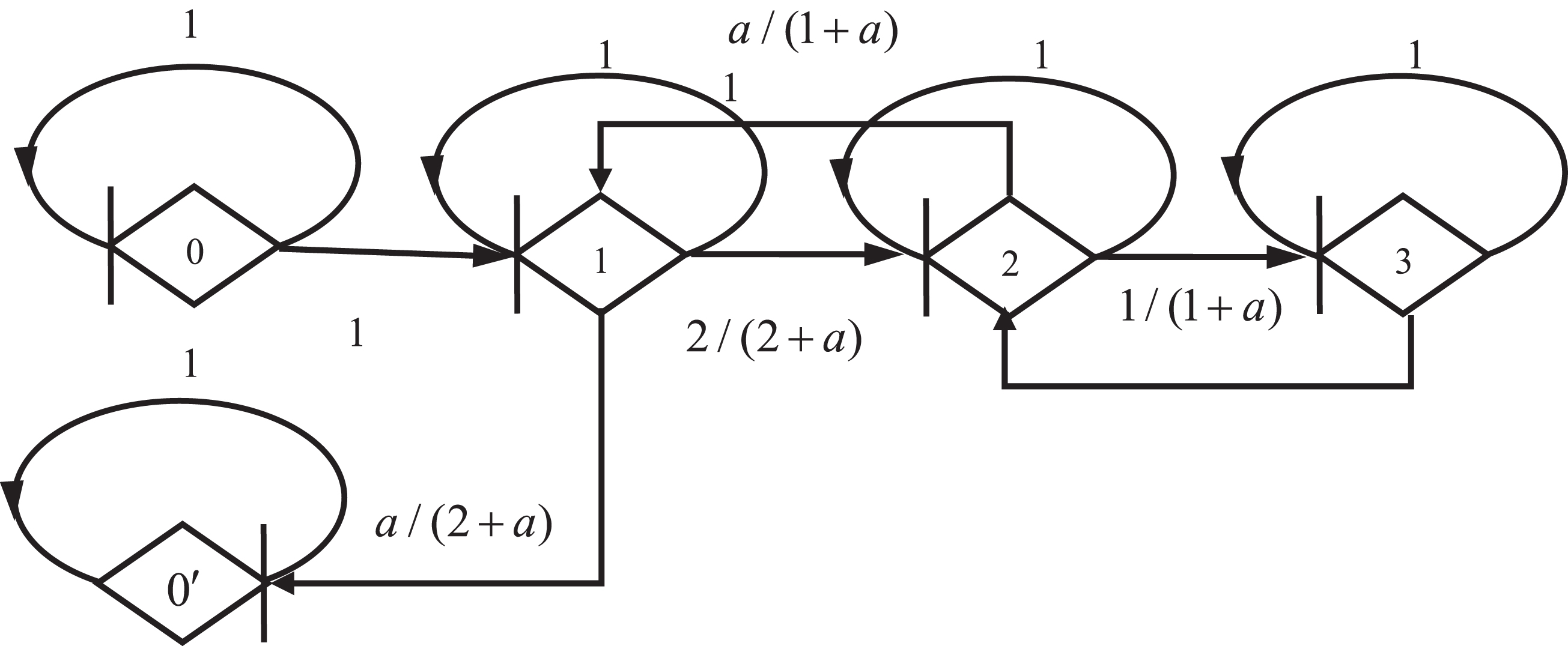
From this, the F-GERT model of radar management system can be constructed as shown in Fig. 19.

State transition F-GERT model.
According to the property of the moment generating function of the fuzzy variable in 4.3, the moment generating function of the radar state transition process can be obtained as follows.
In the initial phase of the state, all radars are normal (2 radars in service and 1 radar standby). When both of the active radars fail, the backup radars will be started, and the system can still work. There are two states for a malfunctioning radar. One is that it can continue to “fight” after maintenance, which is repeated execution in the F-GERT, and the other state is that maintenance fails and becomes invalid. When all the two radars that have been put into use and the backup radar fail, it will affect the operation of the troops. Then the data gotten from the situation that all radars fail and are under repair or waiting for repair is very important. That is to say, what is the probability of achieving from node 0 where all radars are normal to state 3 where all radars “failed”? What is the expected time for normal operation? What is the normal operating variance? This is very important. It needs to be emphasized that the radar can be repaired in case of failure. With a certain probability, it can continue to work normally after repairing. Therefore, in the F-GERT, the number of repairable times and probability of each radar in the radar system can also be calculated.
Based on the basic theory of GERT model and the analytical algorithm, the arrows drawn from state 3 (standby radar) were firstly deleted, in other words, all radars are in maintenance or waiting for maintenance at this time, and the radar system currently “failed.” The F-GERT model solution method was applied to obtain the equivalent transfer function of 0-3 (namely, the equivalent transfer function of all normal operating states to all stopped operating states).
As W E 03 (0) =1, there is M E 03 (s) = W E 03 (s);
If
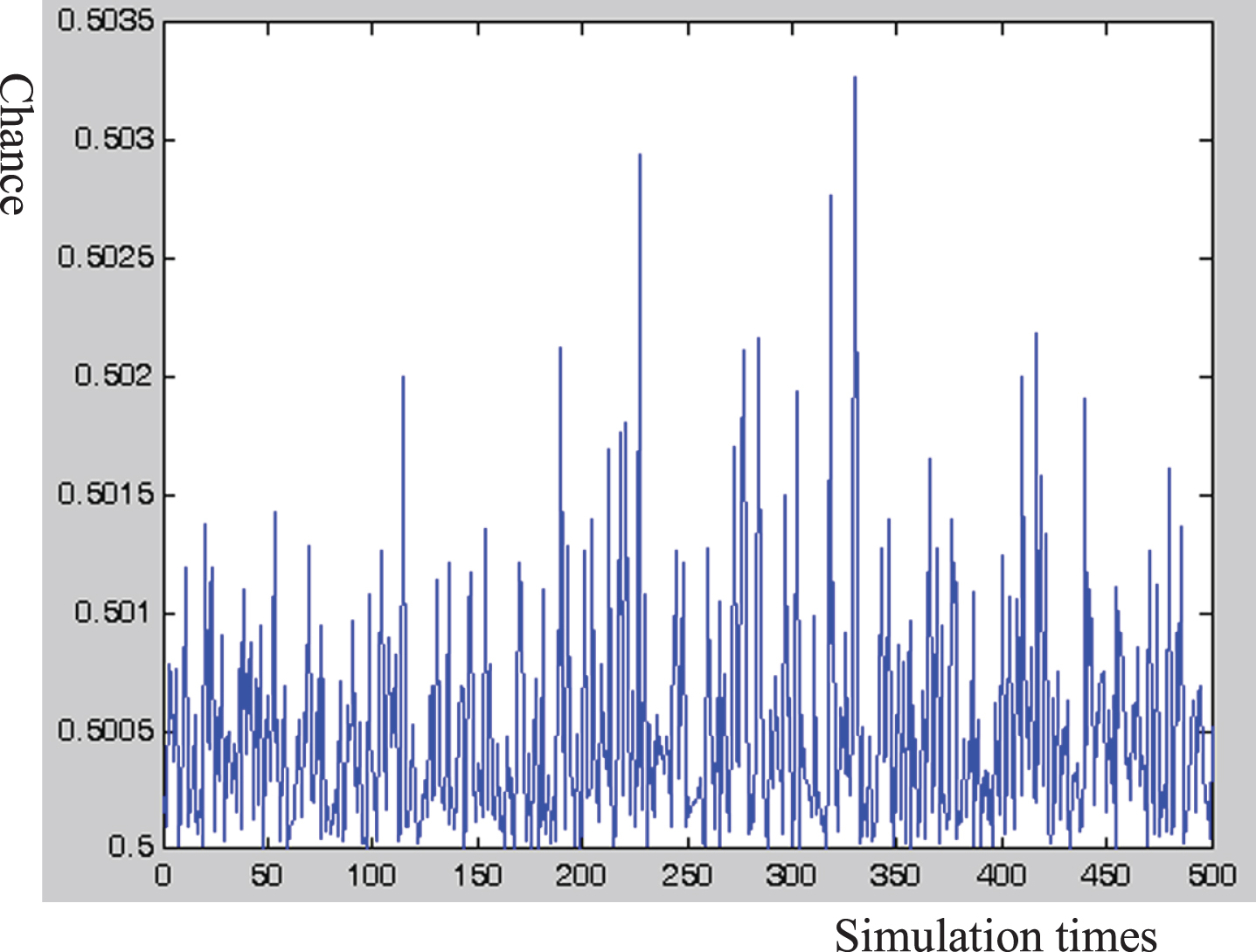
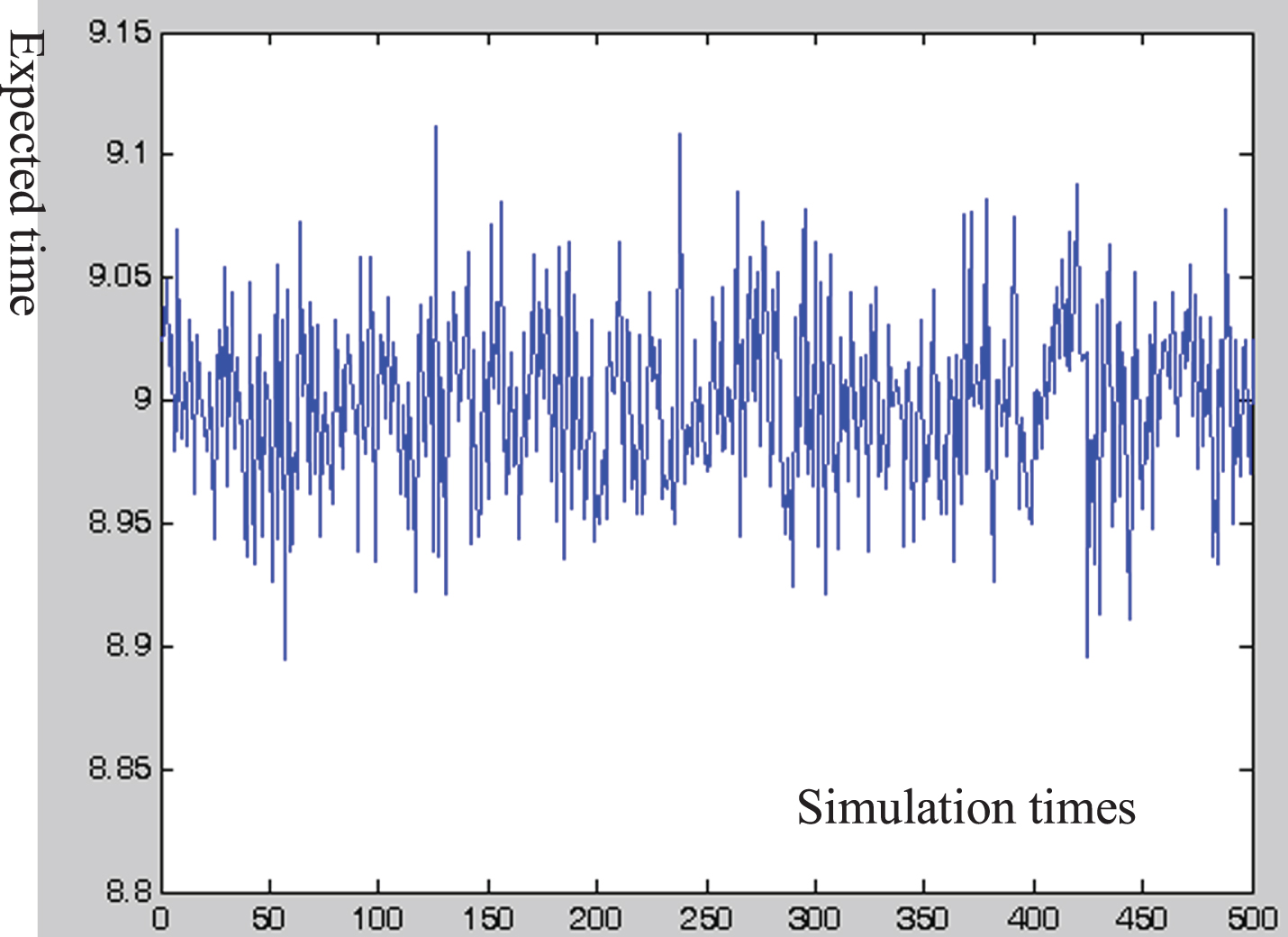
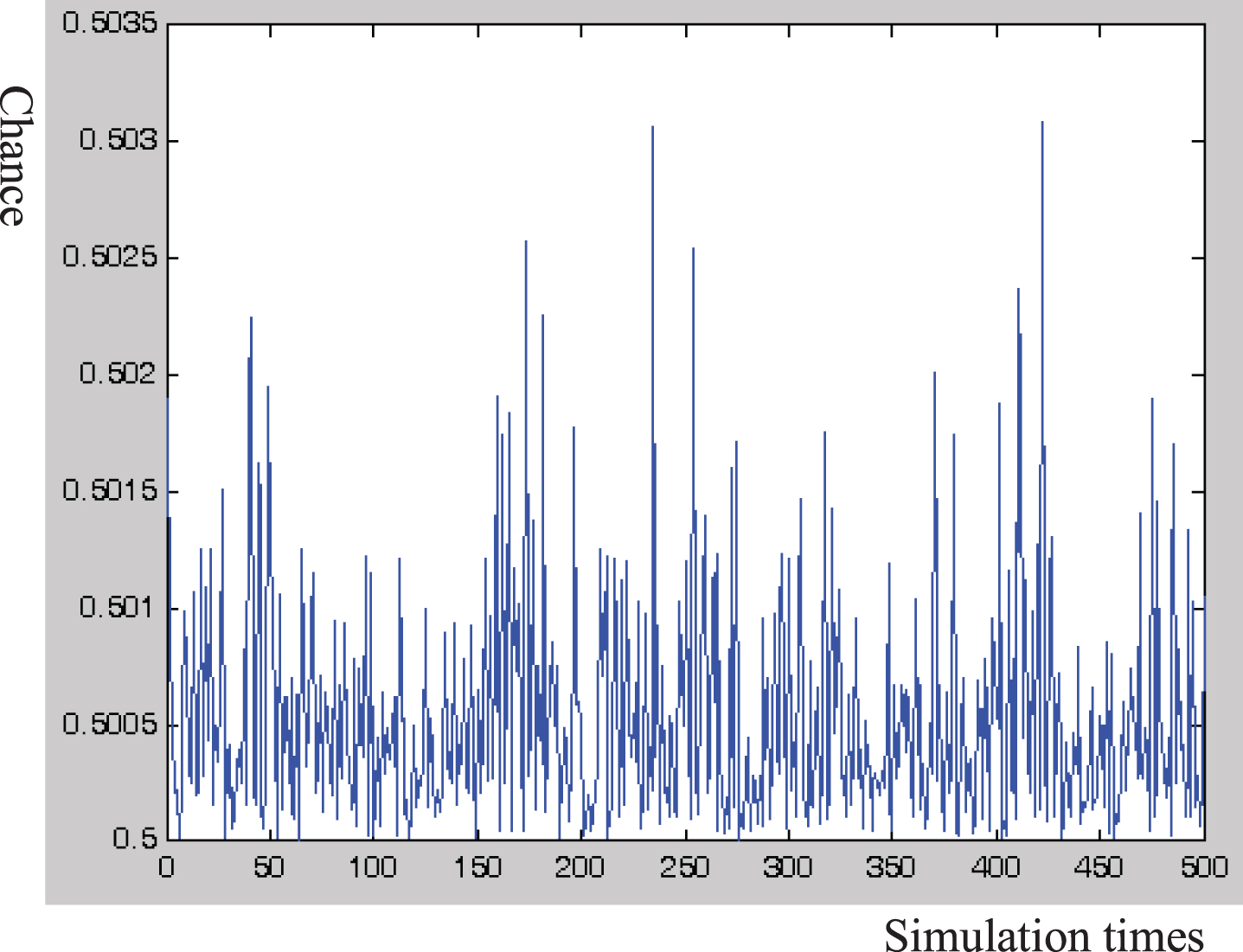
As a is a fuzzy number, the analytical solution of radar system can be solved by simulation. The maximum value, minimum value and mean value of the probability of the radar system from normal operation to complete shutdown (9 time units) Ch {E03 (t) ⩾9} are 0.5033, 0.5 and 0.5005, respectively. The probability variance is 4.74 × 10-4, which means the about 50 percent of radar system fail after 9 time units. So when exactly will the radar system fail? It can be seen that the shortest expected time of a radar system from normal operation to the failure is 8.88 units of time, the longest expectation time is 9.11 units of time, the average expected is 8.9992, and the variance is 3.56 × 10-2. That is to say, the radar system may fail after running 8.88 units of time, but the most likely failure time is 8.99992 units of time, and the longest operation system is 9.11 units of time (Figs. 19 and 20).
Expected time greater than 9.
Therefore, how long does it take for the radar system to go from completely dead to operational (when one or two or three radars are normal)? In the radar system F-GERT, the time when the radar stops waiting for maintenance is actually the expected time that the system will stay in state 3. At this time, node 0 is split into 0 and 0′, while maintaining the moment generating function that leads to activity in state 3 unchanged. According to the definition of the F-GERT repeated execution probability and conditional moment generating function, the moment generating function derived from node 3 is unchanged, and the moment generating functions of the remaining node derived functions are set to 1. Then you can calculate the probability, expected time and time variance of the system from all “failed” states to “normal” states (as shown in Figs. 22 and 23).
0 Simulation time.
The residence time of F-GERT model on state 3.
Expected time greater than 0.138.
The equivalent transfer function can be obtained by means of the F-GERT model solution method.
Through simulation, the maximum of the Ch {E00′ (t) ⩾0.138} (the duration from system breakdown to normal operation is no less than 0.138 units of time) is 0.5031, the minimum is 0.5, the average is 0.5005, and the probability variance is 4.98 × 10-4. That is to say, there will be 0.2 time units that the radar system takes from failure state to normal operation state. So, how long will it take to repair the radar system? It can be seen from the simulation that the longest expectation maintenance time is 0.1404, the minimum is 0.1359, the mean is 0.1384, and the variance is 0.1359. In other words, the maximum time from the total breakdown to normal operation of the radar system is 0.1404 and the minimum time is 0.1359 (Figs. 23 and 24).

Expected time.
The above mentioned radar system will break down after operating 9 units of time. The maintenance time required by the radar equipment system from the complete shutdown to normal operation is 0.1384 units of time. On the basis of the above methods and steps, the expected time of the first arrival from the initial state to any state can be gotten by removing all arrows of any state. It is a reliable and efficient equipment management research method for fault radar forecasting.
The “z-tag” method of F-GERT network can solve the problems of execution probability, expected time and time variance of nodes (activities, networks) of the system with repeated execution times. From the above calculations, it can be known that the radar system has been operating normally from the beginning. After about 9 units of time, the entire radar equipment system may be completely stopped. If the relevant equipment is not added at this time, it will affect the combat effectiveness of the unit. The maintenance time required for the radar system to be “failed” to be able to operate normally is about 0.1384 unit time. This period of time is the “death” time of the system, that is, the radar system is completely ineffective at this time. From the above analysis, we can know that using the z-tag F-GERT network model and its elements of repeated execution times, probability and conditional moment generating function can predict the expected time and probability of the system from the initial state to any state. Therefore, this is a method that can reliably and effectively manage weapons and equipment.
With the consideration of the uncertainty of fuzzy number activity parameters, this paper proposed a z-tag F-GERT model, and defined the feedback network basic unit, the multiple feedback network, progressive multiple feedback network, the multiple feedback network and multiple feedback hybrid network and fuzzy feedback network of the F-GERT model, and studied the simplified rules and related properties of various network, and deduced the moment generating function of the analytical solution expression of the F-GERT model, aiming at resolving the F-GERT modeling and evaluation with repeat realization. In accordance with the uncertainty in the process of weapon equipment system management and repetitive execution, this paper took radar equipment management as example, studied the system to normal operation and maintenance time, and predicted the failure of equipment, which provided data support for the preventive maintenance to the weapons and equipment.
The F-GERT can reflect a variety of fuzzy random factors and the relationship between a variety of fuzzy random variables. It provides effective methods and tools for the research and analysis of many complex systems or problems containing multiple fuzzy random factors. It is a tool with a wide range of applications and a very powerful modeling function. However, as the number of event nodes in the F-GERT increases, the complexity of its operations may increase rapidly. Therefore, how to construct a simple and efficient algorithm for this complex F-GERT is an important concern for further research in the future.
Data availability
The data used to support the findings of this study are available from the corresponding author upon request.
Conflicts of interest
The authors declare that there is no conflict of interest regarding the publication of this paper.
Funding statement
This work was supported by the Natural Science Foundation of China (Grant No. 41801119, 71801085), Social Science Foundation of China (Grant No. 18FGL003), the Key Project of National Language Commission (ZDI135-67), China Postdoctoral Science Foundation funded project (Grant No. 2018M631220), Excellent Youth Foundation of Xinjiang Scientific Committee (Grant No. 2017Q071), Foundation of Shihezi University (RCSX201754), Ministry of Education Foundation of Humanities and Social Sciences (No. 19YJA630039).