
Abstract
Slime mould algorithm (SMA) is a novel metaheuristic that simulates foraging behavior of slime mould. Regarding its drawbacks and properties, a hybrid optimization (BTβSMA) based on improved SMA is proposed to produce the higher-quality optimal results. Brownian motion and tournament selection mechanism are introduced into the basic SMA to improve the exploration capability. Moreover, a local search algorithm (Adaptive β-hill climbing, AβHC) is hybridized with the improved SMA. It is considered from boosting the exploitation trend. The proposed BTβSMA algorithm is evaluated in two main phases. Firstly, the two improved hybrid variants (BTβSMA-1 and BTβSMA-2) are compared with the basic SMA algorithm through 16 benchmark functions. Also, the performance of winner is further evaluated through comparisons with 7 state-of-the-art algorithms. The simulation results report fitness and computation time. The convergence curve and boxplot visualize the effects of fitness. The comparison results on the function optimization suggest that BTβSMA is superior to competitors. Wilcoxon rank-sum test is also employed to investigate the significance of the results. Secondly, the applicability on real-world tasks is proved by solving structure engineering design problems and training multilayer perceptrons. The numerical results indicate the merits of the BTβSMA algorithm in terms of solution precision.
Keywords
Introduction
In recent years, with the rise of internet technology, artificial intelligence (AI) has entered a comprehensive outbreak period. When dealing with science and engineering problems, it is often necessary to find the global optima from a large number of available solutions [1]. How to solve optimization problems is an inseparable part. Classical mathematical techniques need to face the challenges of complex search space, suboptimal regions, and growing dimensionality. Hence, they can not be regarded as highly efficient methods [2]. Metaheuristic algorithms (MAs) have been developed over the past few decades to solve complex NP-hard problems.
Nature-inspired MAs mainly simulate the physical concept or biological phenomena. The researchers applied physical laws and mathematical rules to design some optimization algorithms, such as Simulated Annealing (SA) [3] and Sine Cosine Algorithm (SCA) [4]. The biological phenomena-inspired MAs can be divided into three categories: evolution-based algorithms, swarm-based algorithms, and human-based algorithms. One of the well-regarded ones in evolution-based algorithms is Genetic Algorithm (GA) [5] and Differential Evolution (DE) [6]. The swarm-based algorithms mainly originates from the collective behavior of animals. Particle Swarm Optimization (PSO) [7] and Ant Colony Optimization (ACO) [8] are both important parts in this branch. The third kind is influenced by human behavior, including Teaching-Learning Based Optimization (TLBO) [9]. Among them, there are two identical stages in the search process: exploration and exploitation. The well-organized optimizer needs the high-level exploration in early iterations and the superior exploitation in final stages. Generally speaking, the certain purpose is to achieve a reasonable and fine balance between the exploration and exploitation tendencies [10].
A few well-known and traditional MAs are listed above. Whereas, the development process never stops. Sulaiman et al. recently proposed a Barnacles Mating Optimizer (BMO) algorithm by mimicing the mating behavior of barnacles and applied it to the power system engineering problem [11]. In 2020, Khishe et al. implemented the Chimp Optimization Algorithm (ChOA) by building mathematical models. The experimental results indicated that ChOA is superior to PSO, GA, GSA, BH, GWO, CS, BBO, ALO, and LGWO [12]. Houssein et al. proposed a Lévy flight distribution (LFD) algorithm for solving the area coverage problem in wireless sensor networks (WSNs) in 2020. Eventually, the LFD algorithm achieved 43.16 % coverage rate [13]. By introducing time-varying coefficients and random velocities, an improved version of PSO was proposed called TACPSO. The improvements increase the probability of finding global optima [14]. In the CEC 2017 competition, LSHADE-cnEpSin [15], LSHADE-SPACMA [16], and EBOwithCMAR [17] performed the best based on benchmark functions for global optimization.
The No Free Lunch (NFL) theorem been proven logically that no one existing algorithm can solve all kinds of optimization problems [18]. Hence, it motivates researchers to design novel or enhanced algorithms to better solve existing or future optimization problems. There are two main trends to enhance algorithms: one is to improve core equations of the algorithm by using diverse strategies; the other is to hybrid two promising algorithms. SMA is a recently proposed metaheuristic algorithm, which is inspired by the diffusion and foraging behavior of slime mould [19]. A new local search algorithm called AβHC is proposed in 2019 [20]. To this end, Brownian motion and tournament selection are introduced to improve the core equation of the basic SMA. Besides, AβHC is hybridized with the improved SMA. To assess the performance of the proposed algorithm, the function optimization, structure engineering design, and training multilayer perceptron are considered.
The rest of this paper is structured as follows. Section 2 describes the SMA briefly. Section 3 introduces some preliminaries and highlights the details of the proposed algorithm. In Section 4, the performance of the proposed algorithm is evaluated based on function optimization. Section 5 provides the numerical results of the proposed algorithm in solving structure engineering design problems. Training multilayer perceptron experiments are conducted in Section 6. Finally, conclusions and future directions are given in Section 7.
Slime mould algorithm
SMA as a new stochastic optimizer was proposed by Li et al in 2020 [19]. It was inspired from the behavior and morphological changes of slime mould in foraging. The brief description of SMA is provided as follows. Equation (1) is proposed to update the position of slime mould. The mathematical model is designed in three different approaches.
The weight coefficient W of slime mould is calculated in Equation (3). It mathematically simulates the feedback relationship to make slime mould tend to be in a better position of food concentration.
The parameter p in Equation (1) is calculated in Equation (4).
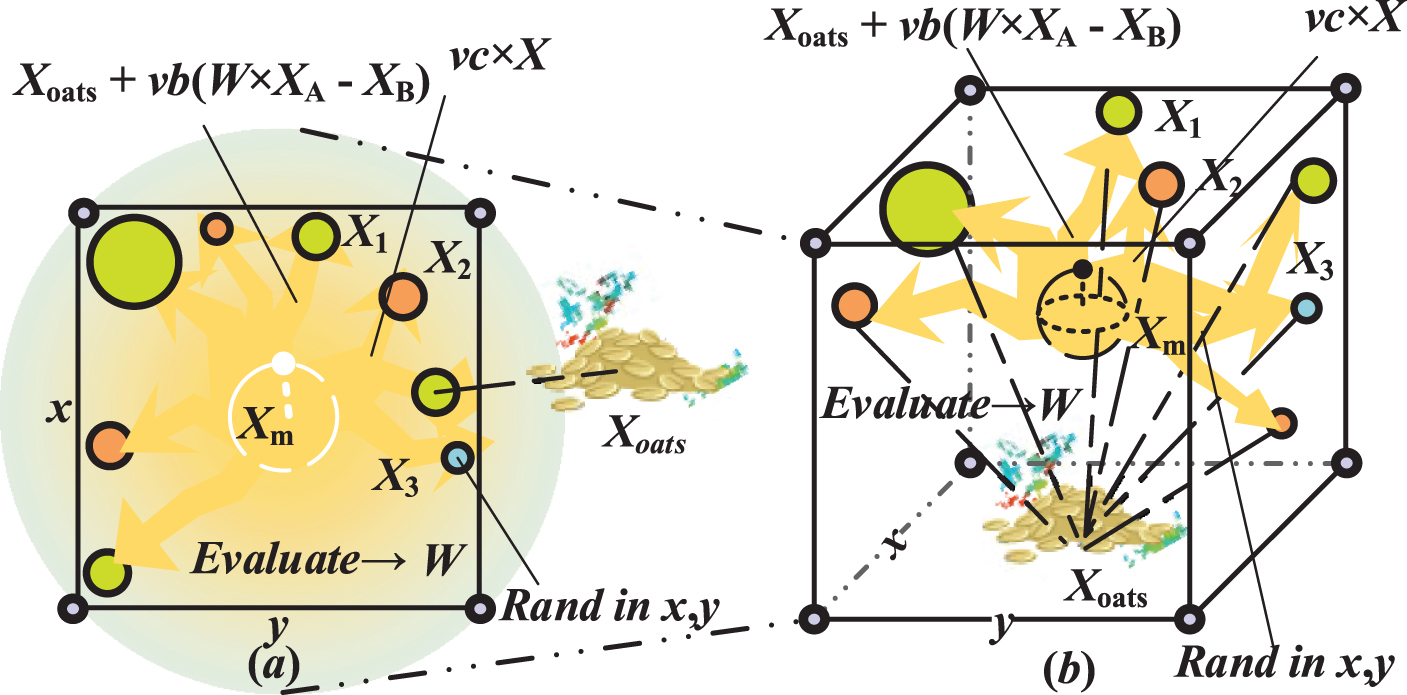
Possible positions of slime mould [19].
Firstly, Brownian motion and tournament selection are introduced. Both are used to improve the performance of the native SMA. Next, the adaptive β-hill climbing algorithm is also introduced and hybridized with the improved SMA. Finally, the gain mechanism and flowchart of two different versions of the proposed BTβSMA algorithm are presented.
Brownian motion
Brownian motion is a theory that is used to explain random motion. The step length of the standard model is drawn from the probability density function defined by normal distribution with μ=0 and σ2 = 1. The probably density function at point x for Brownian motion is calculated in Equation (5).
Fig. 2 shows the three-dimensional trajectory distribution of Brownian motion. It can be clearly observed from Fig. 2 that the steps from Brownian motion show more efficient performance in tracing and exploring distant areas of domains than uniform random search [21].
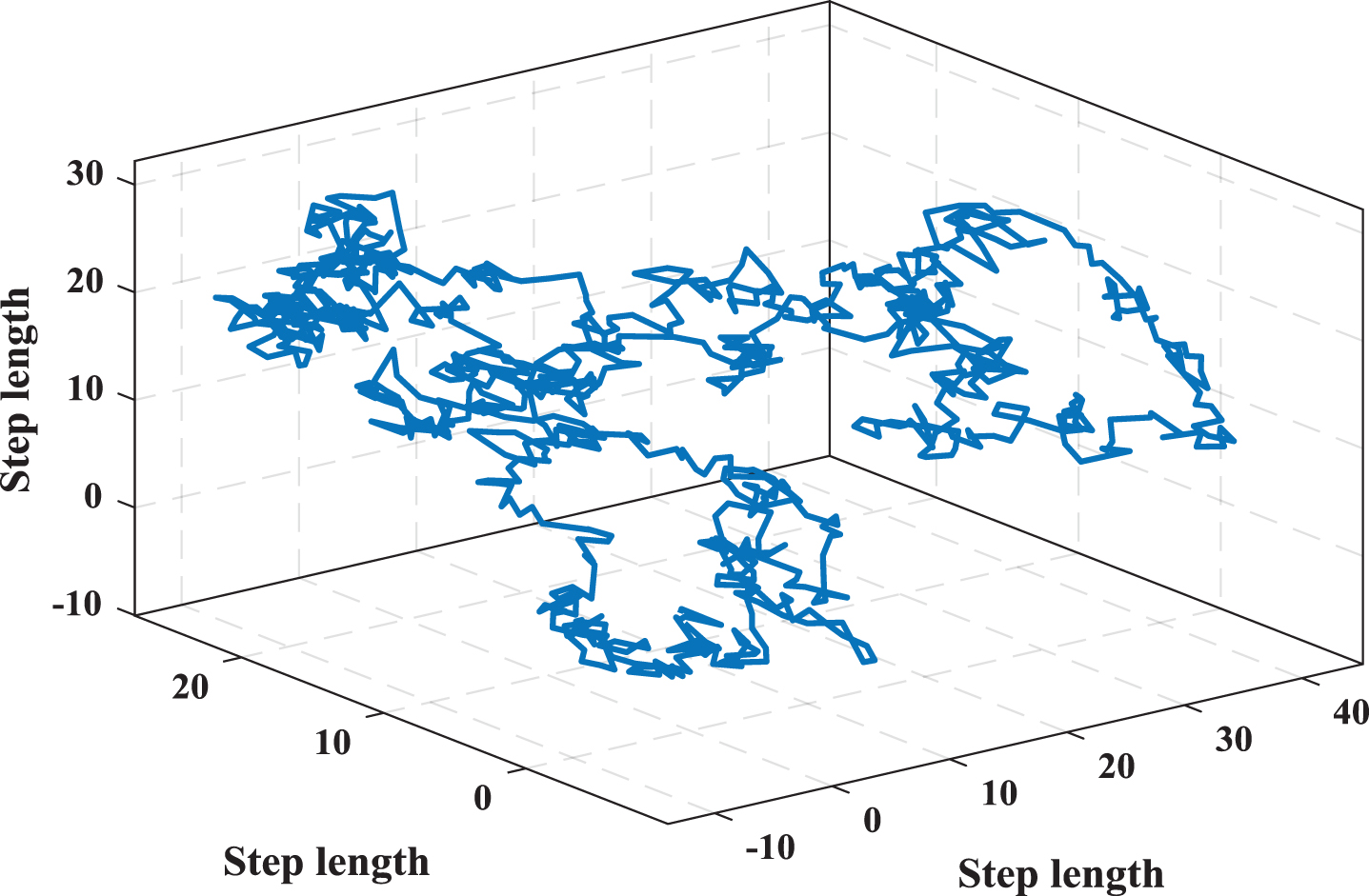
3D Brownian motion trajectory.
Tournament selection is a competitive selection mechanism, which was proposed by Goldberg et al [22]. It is easy to implement and has been widely used in evolutionary algorithms. It places several tournaments among n individuals randomly selected from the population (N, n < N). The individual with the best fitness is determined as the winner. The random number r in the range of 0 to 1 is generated and compared with the selection pressure p. If r is greater, then the individual with the higher fitness is selected, otherwise, the weaker individual is selected. Thus, tournament selection provides the chance for most individuals to be selected. The diversity of the population is preserved. Algorithm 2 shows the pseudo-code of tournament selection.
Adaptive β-hill climbing
Recently, a local search algorithm (adaptive β-hill climbing) was proposed by Al-Betar et al [20]. It is worth mentioning that AβHC can outperform other comparative local search algorithms, such as well-regarded simulated annealing (SA) [3] algorithm. The mathematical model of AβHC is represented as following.
In the iteration process, AβHC moves the current solution x
i
= (x1, x2, …, x
D
) to a new neighboring solution
In SMA algorithm, Equation (1) is used to update the position of the slime mould, so that they can tend to explore the higher food concentration. As can be observed from Equation (1), the method of position updating follows random walk under the condition of “rand < z”.
SMA is a recently proposed metaheuristic algorithm that shows excellent performance. In fact, the native SMA still has some features that can be improved to achieve more robust exploration and exploitation capabilities. Firstly, random distribution is replaced in the basic SMA algorithm with Brownian motion to enhance the exploration capability. Brownian motion can cover areas with more uniform and controlled steps. Tournament selection mechanism is used to select search individuals from the population, because it provides more chances for all individuals to be selected. The improved method of position updating is given in Equation (10).
Moreover, a local search algorithm (AβHC) is hybridized with the basic SMA algorithm. In this paper, two hybrid models are proposed. On the one hand, The AβHC algorithm is embedded in SMA algorithm as an operator. After SMA algorithm performs the position updating, AβHC algorithm continues to work on the obtained solution, and then replaces the original solution with the enhanced solution. The hybrid version of SMA is labeled as BTβSMA-1. On the other hand, after applying SMA algorithm and finding the best solution, AβHC algorithm is used to enhance the final solution in parallel. The hybrid version of SMA is labeled as BTβSMA-2. These two novel hybrid ideas make exploration and exploitation behaviors of the algorithm be carefully considered. The flowchart of the proposed algorithm is represented as Fig. 3.
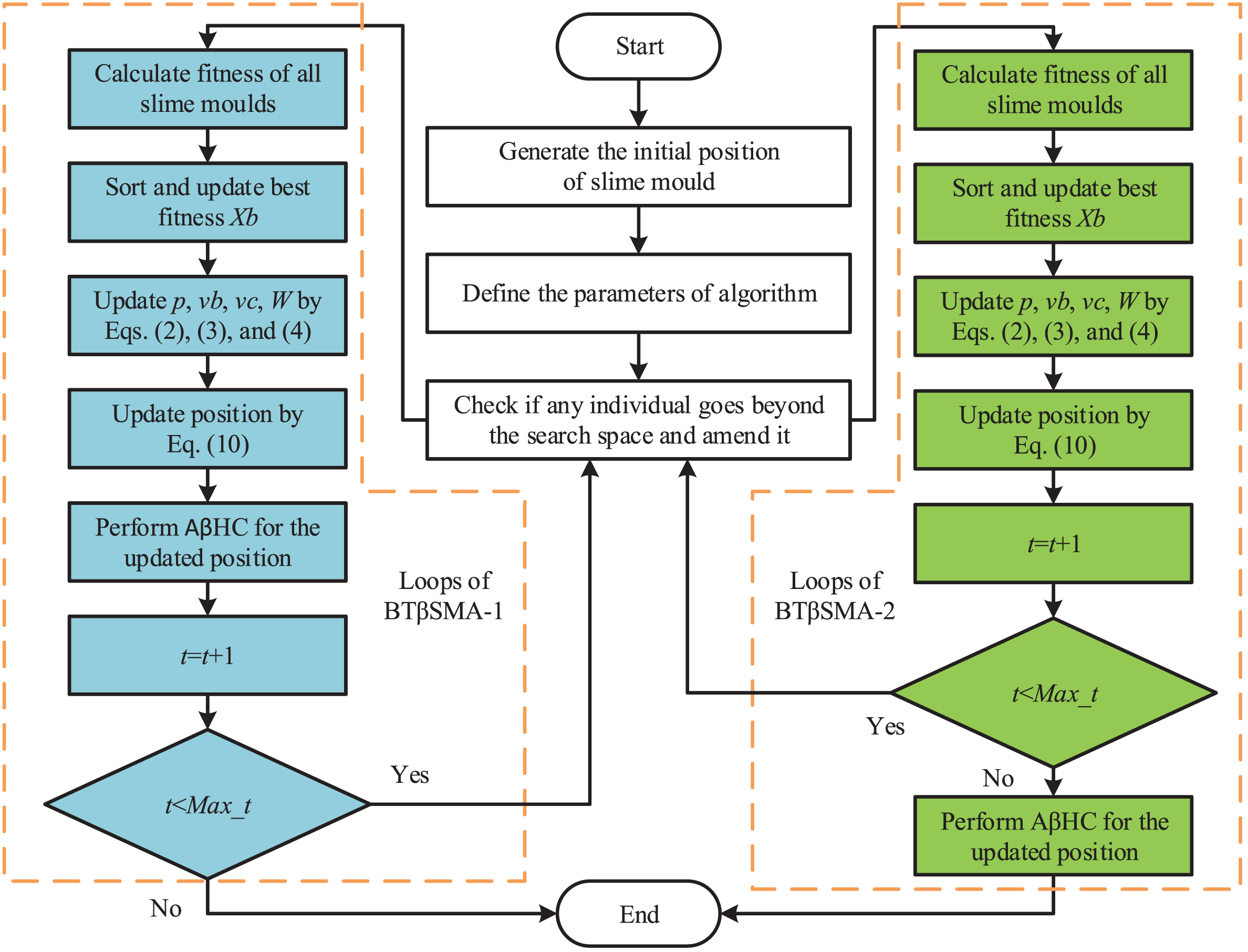
The flowchart of proposed BTβSMA algorithm.
In this section, benchmark functions are used to evaluate the optimization performance of the proposed algorithm. Firstly, the experimental environment and other prepared works are given. Next, the two variants are compared. Finally, the winner is used for further statistical discussion with state-of-the-art algorithms in function optimization.
Prepared works
All the experimental series were carried out on Matlab R2016b, and the computer was configured as Intel(R) Core (TM) i5-4210U CPU @1.70 GHz processor with 4 GB of RAM, using Microsoft Windows 10 system.
In this paper, a set of 16 benchmark functions cover unimodal, multimodal, and fix-dimension multimodal functions, as shown in Table 1. Different types of functions can analyze the performance of the algorithm from exploitation competence, exploration competence, and avoiding local optima competence.
Benchmark functions
Benchmark functions
The comparison algorithms include recent and state-of-the-art ones: BMO [11], ChOA [12], LFD [13], TACPSO [14], LSHADE-cnEpSin [15], LSHADE-SPACMA [16], and EBOwithCMAR [17]. Among them, the maximum of iterations is 500 and the population size is 30. We follow the same parameters in the original articles. The main parameters of all algorithms are detailed in Table 2.
Parameters of the algorithms
In this subsection, the performance of SMA, BTβSMA-1, and BTβSMA-2 over the average fitness (Avg) and standard deviation (Std) is compared. Each algorithm is executed individually 30 times in each benchmark function to reduce random factors. The numbers in bold represent the best results in all following reports. Moreover, the gain mechanisms is also analyzed by the obtained results. Note that BTβSMA-1 algorithm introduced Brownian motion and tournament selection, and embedded AβHC algorithm as an internal operator in improved SMA. The difference is that in BTβSMA-2 algorithm, AβHC algorithm is applied to the final solution after the execution of improved SMA.
Table 3 reports the average fitness and standard deviation. Inspecting Table 3, two hybrid algorithms outperform the basic SMA algorithm or reach the same results. Owing to minimizing objective function problems, BTβSMA-2 has the best results in 10 out of 16 benchmark functions in terms of average fitness. BTβSMA-1 provides the best results in F11. Three algorithms obtain the same results in the remaining functions. It is worth mentioning here that BTβSMA-2 presents the theoretical global minimum in certain functions. In terms of standard deviation value, BTβSMA-2 is also the champion algorithm since it provides the best results in 56.25% of the functions. BTβSMA-1 has the best results in F4 and F11. Both the same and the best results are achieved in F1, F3, F9, F10, and F13. It hopefully proves that BTβSMA-2 algorithm is more robust and accurate in functions optimization.
Fitness of two variants and SMA algorithm
Fitness of two variants and SMA algorithm
These benchmark functions cover diverse types and permit to evaluate the performance of the investigated algorithms. By analyzing Table 3, it can be observed that the proposed algorithm enhances the exploration and exploitation capability of the basic SMA. Moreover, BTβSMA-2 shows significantly superior performance than BTβSMA-1 in terms of average fitness and standard deviation. On the one hand, improved SMA is capable for locating high-performance regions in the search space. On the other hand, sequential hybrid AβHC with improved SMA not only enhances the exploitation, but also does not damage the exploration of the basic algorithm. Therefore, BTβSMA-2 will be used for further comparison and discussion based on the conclusions obtained in this subsection.
To further show the superiority of BTβSMA-2, the experiment is carried out for two categories of algorithms: (i) BMO, ChOA, and LFD as the recently proposed algorithms. (ii) TACPSO, LSHADE-cnEpSin, LSHADE-SPACMA, EBOwithCMAR as high-performance algorithms. The study provides the results, including average fitness, standard deviation, average computation time, and p-values using Wilcoxon rank-sum test.
Table 4 reports the average fitness. Table 5 reports the standard deviation. The unimodal functions (F1-F7) have only one global optima, so they can evaluate the exploitation capability of the algorithm. BTβSMA-2 ranks first or second in 6 out of 7 functions regarding the average fitness, and in 5 out of 7 functions regarding the standard deviation. The results show that BTβSMA-2 can accurately converge toward the global optimum, which owes to hybrid AβHC algorithm. The multimodal functions (F8-F12) have one global optima and multiple local optima so they can evaluate the exploration capability of the algorithm. Whether the average fitness or standard deviation, BTβSMA-2 all obtains the best results in all functions. This proves that BTβSMA-2 can effectively avoid from local optima. This capability benefits from Brownian motion and tournament selection. The fixed-dimenstion multimodal functions are the combination of the first two types of functions. These functions (F13-F16) are designed to evaluate the relationship between the exploration and exploitation of the algorithm. BTβSMA-2 is still the champion algorithm and almost finds the theoretical minimum in 3 functions. This shows that BTβSMA-2 can appropriately balance the exploration and exploitation when dealing with challenging search space. Note that BMO is also competitive in function optimization.
Average fitness of BTβSMA-2 with other algorithms
Average fitness of BTβSMA-2 with other algorithms
Std values of BTβSMA-2 with other algorithms
To visually show the convergence behavior and stability of the algorithm, Fig. 4 draws the search space, convergence curve, and boxplot of BTβSMA-2 with other algorithms for F5, F12, and F14. It can be observed that BTβSMA-2 occasionally escapes local optima with the iterations and eventually becomes better than the others. The boxplots obtained based on BTβSMA-2 have few outliers and indicate the stability guarantee.
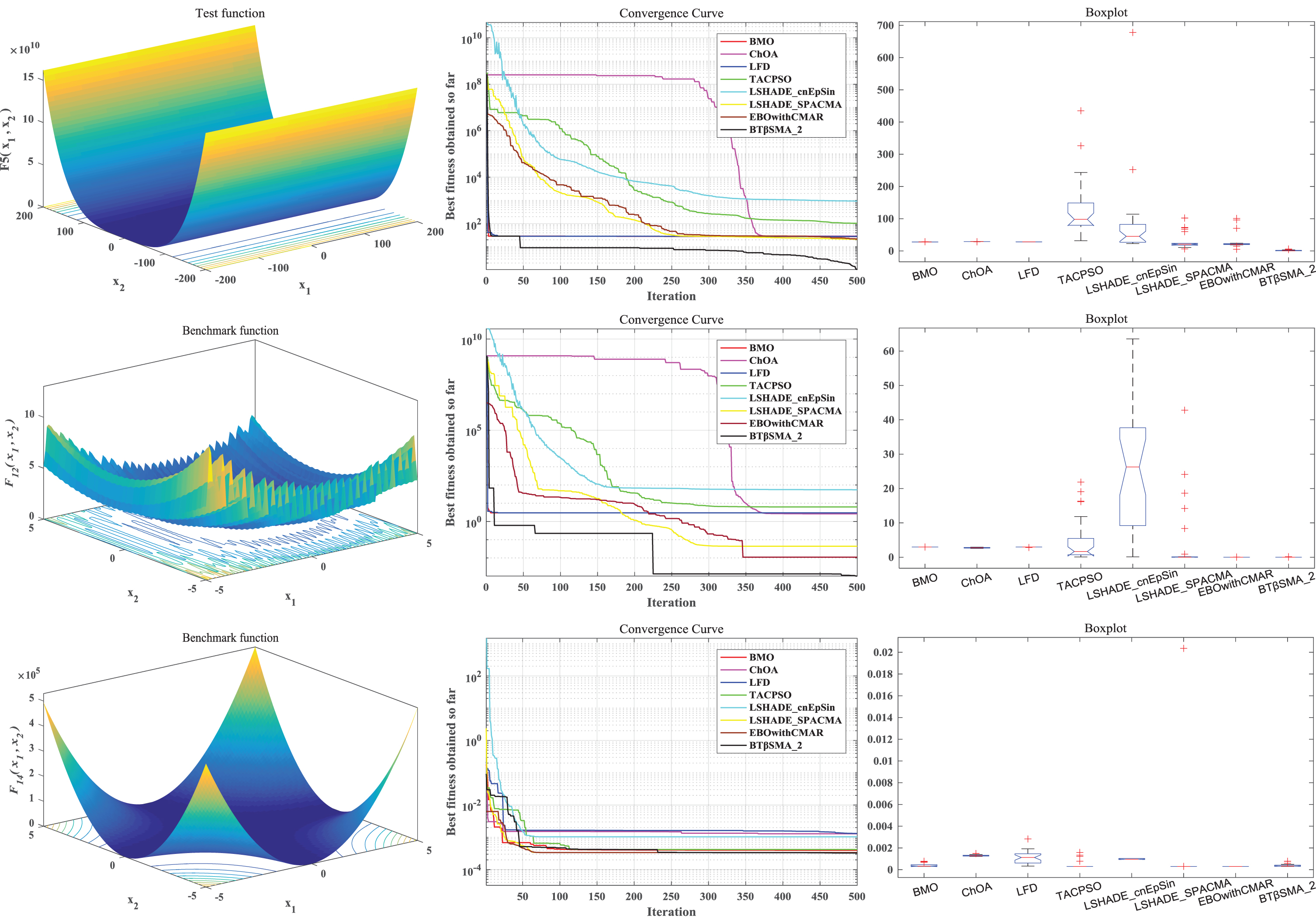
Search space, convergence curve, and boxplot of F5, F12, and F14.
Table 6 reports the average computation time. The total time of each algorithm is calculated and sorted as follows: LFD > ChOA >BTβSMA-2 > BMO > LSHADE-SPACMA > LSHADE-cnEpSin > EBOwith CMAR > TACPSO. The computation cost of TACPSO algorithm is the least, and our proposed algorithm is acceptable.
Average computation time of BTβSMA-2 with other algorithms
As a nonparametric statistical test, Wilcoxon rank-sum test can effectively examine the significant difference between the two algorithms. One of the parameters obtained by using the Wilcoxon rank-sum test is p-value. In this study, the significance level is set to 0.05. The p-value less than 0.05 indicates that the two algorithms are of the different distribution in statistics (strong evidence against the null hypothesis) [23]. Table 7 reports the obtained p-values. Compared with different types of functions and different algorithms, p-values are all less than 0.05. It confirms that BTβSMA-2 has superior performance and statistical difference compared with competitor algorithms.
Comparison of BTβSMA-2 with other algorithms based on Wilcoxon rank-sum test
In this section, two structure engineering design problems (gear train design and three bar truss design) are used to evaluate the practicability and superiority of BTβSMA-2. We use the death penalty method to deal with infeasible solutions according to the constraints. Each algorithm runs independently for each project 30 times, with the population size of 30 and the iteration number of 500.
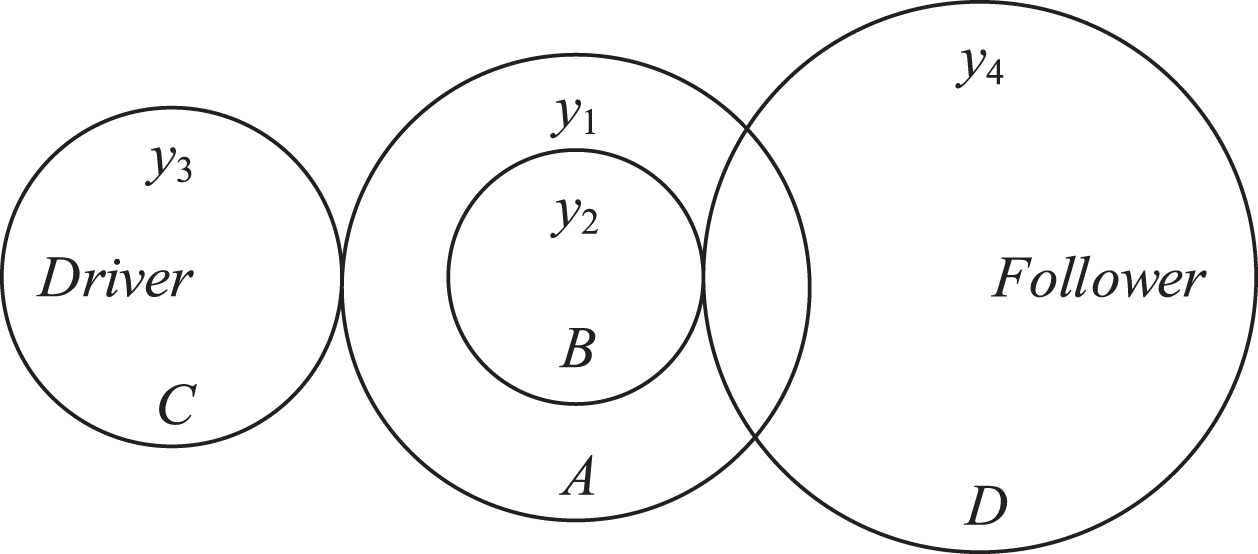
Gear train design
This is an unconstrained optimization problem that was proposed by Sandgren [24]. Fig. 5 shows the gear train with four variables (y1, y2, y3, and y4). The final aim is to minimize the gear ratio (
Gear train [25].
The results of variables and fitness are reported in Table 8. BTβSMA-2 obtains the best fitness corresponding the optimal solution (43, 16, 19, 50). Compared with other algorithms, BTβSMA-2 can be considered to be more suitable for solving this design problem.
Results for gear train design
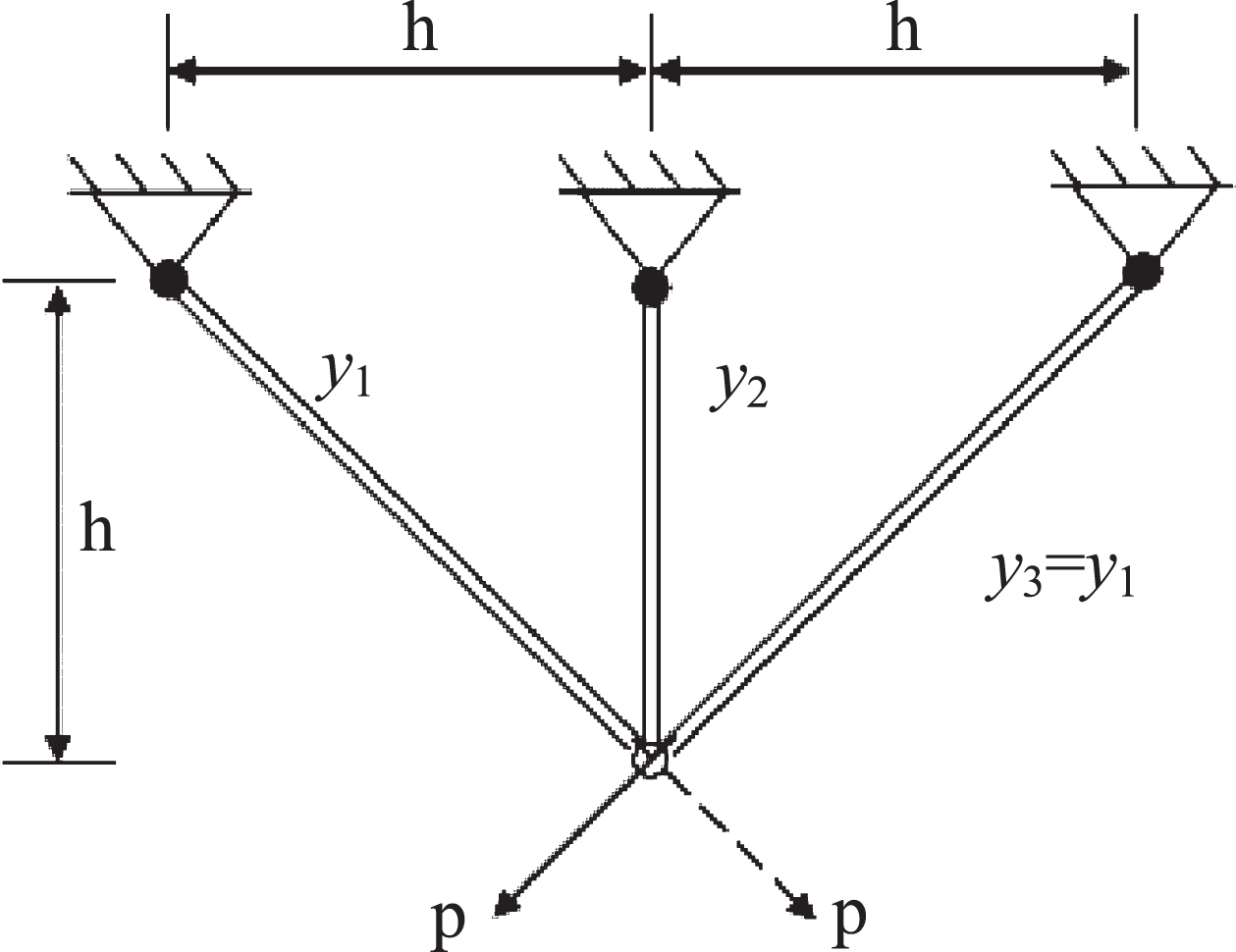
It is an optimization problem with three constraints that was proposed by Nowcki [26]. Fig. 6 shows the three-bar truss. The final aim is to find two optimal cross sectional areas (y1 and y2). The mathematical model is designed as follows:
Three-bar truss [25].
The results of variables and fitness are reported in Table 9. Among these results, BTβSMA-2 provides the best fitness corresponding the optimal solution (0.7887 and 0.4083). The obtained results by BMO, LSHADE-cnEpSin and LSHADE-SPACMA are similar to BTβSMA-2. But the proposed algorithm has great potential in solving this design problem.
Results for three-bar truss design
The neural network with one-way transports and only one hidden layer is called multilayer perceptron (MLP). The two critical parameters to determine the final output of MLP are weights W and biases θ. In this section, the Balloon dataset and Breast cancer dataset from UCI repository [27] are used to evaluate the performance of BTβSMA-2 for training MLP.
The evaluation criteria of an MLP is the average of mean square error.
It is assumed that variables are in the range [–10, 10]. Each algorithm runs independently 10 times, with the population size of 30 and the iteration number of 250. The number of hidden nodes is equal to 2N + 1 where N indicates the number of features of selected datasets [28]. The Balloon dataset includes 4 features, 16 samples, and 2 classes. The Breast cancer dataset has 9 features, 699 samples, and 2 classes.
Table 10 reports the
Results on two datasets
In this paper, a novel hybrid algorithm called BTβSMA is proposed to alleviate the immature exploration and exploitation in the standard SMA. Brownian motion, tournament selection, and AβHC algorithm are employed to increase the level of both the phases. The proposed algorithm is compared with some latest metaheuristics and high-performance algorithms on 16 benchmark functions. The results show that the performance of BTβSMA-2 is better than that of competitors in statistics. It can provide an optimal solution for most problems. To further verify the applicability of BTβSMA-2 on real-world tasks, BTβSMA-2 is applied to design engineering structure and train MLP. The numerical results demonstrate the efficacy of the BTβSMA-2 on solution precision.
For future directions, binary or multi-objective versions of BTβSMA-2 can be considered to solve more hot branches, such as image segmentation, feature selection, and shop scheduling problems.
Footnotes
Acknowledgments
This work was supported by the Fundamental Research Funds for the Central Universities (No. 2572019BF04), and the Northeast Forestry University Horizontal Project (No. 43217002, No. 43217005, No. 43219002).