
Abstract
This research is concerned with the adaptive neural network observer based fault approximation and fault-tolerant control of time-varying nonlinear systems. A new strategy for adaptively updating the weights of neural network parameters is proposed to enhance fault detection accuracy. Lyapunov function theory (LFT) is applied for adaptively updating the learning parameters weights of multi-layer neural network (MLNN). The purpose of using adaptive learning rates to update the weight parameters of MLNN is to obtain the global minima for highly nonlinear functions without increasing the computational complexities and costs and increase the efficacy of fault detection. Results of the proposed adaptive MLNN observer are compared with conventional MLNN observer and high gain observer. The effects of various faults or failures are studied in detail. The proposed strategy shows more robustness to disturbances, uncertainties, and unmodelled system dynamics compared to the conventional neural network, high gain observer and other existing techniques in literature. Fault tolerant control (FTC) schemes are also proposed to account for the presence of various faults and failures. Separate sliding mode control (SMC) based FTC schemes are designed for each observer to ensure stability of the faulty system. The suggested strategy is validated on Boeing 747 100/200 aircraft. Results demonstrate the effectiveness of both the proposed adaptive MLNN observer and the FTC based on the proposed adaptive MLNN compared to the conventional MLNN, high gain observer and other existing schemes in literature. Comparison of the performance of all the strategies validates the superiority of the proposed strategy and shows that the FTC based on proposed adaptive MLNN strategy provides better robustness to various situations such as disturbances and uncertainties. It is concluded that the proposed strategy can be integrated into the aircraft for the purpose of fault diagnosis, fault isolation and FTC scheme for increasing the performance of the system.
Introduction
Over the past few decades, safety and reliability of the dynamic systems have become critical factors in industry. Requirements for fault tolerant systems are increasing beyond the safety-critical systems like high-rise buildings, engines, nuclear reactors and aircrafts to new and innovative systems such as autonomous systems [1–4] and human systems [5, 6]. For all the mentioned systems, Fault Diagnosis (FD) or Fault Detection is one of the important methods that can elude faults and failures and avoid breakdowns and disasters resulting in potential human mortalities. Diverse schemes and approaches have been utilized for Fault Diagnoses such as hybrid scheme [7], model-based scheme and computing-intelligence based scheme [8]. For enhancing the performance of aircraft, sensor fault diagnosis and isolation is essential and important. The main advantage of using model-based schemes over hardware redundancy for sensor fault detection and isolation is the weight reduction of the aircraft which enhances the aircraft performance and leads to both noise reduction and fuel economy [9]. Over the past few decades, many schemes were suggested for sensor fault detection and isolation by making use of the model information [10]. Sensor faults and failures were also considered in projects related to fault detection and isolation in aerospace engineering, such as reconfiguration [11] and advance fault diagnosis [9]. Diverse model-based methods have been suggested for aircraft sensor faults detection and isolation. Residual generation approach based on the H∞ algorithm is proposed by utilizing the dynamics of the NASA Generic Transport Model (GTM) aircraft in combination with pitot-static fault model, in their approach, they have designed two H∞ filers for faults detection, one filter is dependent on the measurements of the aircraft whereas the other filter is additionally incorporated for control commands [12]. In [13], an online approach is proposed for the fault detection of chillers, which is the subsystem of heating ventilation air conditioning (HVAC), in first step they have proposed recursive one-class support vector machine (ROSVM), in order to improve the efficiency and effectiveness of their approach, the ROSVM is combined with the Extended Kalman Filter (EKF). Their approach is for the systems which fall into faulty status gradually, how the proposed approach used in this research is suggested for abrupt faults occurrence. In [14], the distributed filtering algorithm is suggested for the soft fault detection of the wireless sensor networks (WSNs) of the nonlinear stochastic systems, they have proposed IT2 T-S fuzzy based distributed fault detection filter in order to avoid the coupling between the wireless sensors as wireless sensors can receive the information as well as from other neighboring sensors. In [15], the cross Long-short term Memory (cross-LSTM) and sliding window Long-short term Memory (SW-LSTM) neural networks are used for the fault detection of electro-mechanical actuators of the aircraft, they have suggested these algorithms based on known time series and known faults type whereas the proposed algorithm used in this research article is for any random and unknown faults detection and isolation. The aircraft sensors and actuators fault detection, isolation and accommodation strategy is suggested in [16], they have used unknown input observers for this purpose, they have assumed redundant sensors existence in the system, therefore, the sensor accommodation is done through switching technique, while the actuator accommodation is done by using the gain scheduling, if a fault occurs in one actuator, the remaining (n-1) actuators are considered. In [17], active fault tolerant control approach is developed for the aircraft, their approach is comprised of fault detection and diagnosis module generates the approximation of the faults which is exploited by additional feedback loop in order to accommodate the fault. In [18], sliding mode observer is designed for the approximation of the pitch and roll attitude angles based on which the fault detection and isolation strategy is developed for gyroscope and accelerometer sensors bias fault, in their work, two detection estimators are suggested, allowing the simultaneous estimation of accelerometer and gyroscope sensors bias fault as well as additional adaptive nonlinear observer is used for the robust approximation of the unknown measurements of the sensors bias. Control based fault detection and isolation which utilize the information of control was also applied by [19]. The multiple-model adaptive technique was applied for detection and isolation of sensor faults [20]. The performance and effectiveness of model-based techniques are dependent on the model of the system used. Because of the complexities, the real-time systems are normally simplified with restricted precision. For complex systems such as aircraft, accurate aerodynamic moments and forces are not always possible to obtain, as a result uncertainties exist in the system model. Often systems are affected by external turbulences that affect the performance and effectiveness of the model-based schemes. During flight, disturbances like wind and time-varying wind are inevitable. The existence of disturbances such as turbulence and wind are also the main factors for aircraft fault detection and isolation. Wind and turbulence can exist in diverse conditions during the flight.
Inertial measurement unit (IMU) is comprised of accelerometers which calculate the specific forces (A x , A y and A z ) and gyros which calculate the angular rates (p, q and r). Yaw rate (r) sensor faults are investigated in “Advanced Fault Diagnosis for Sustainable Flight Guidance and Control (ADDSAFE)” project [9] utilizing the parameter varying sliding mode method for the reduction of the effect of linearization errors. Linearization is not required in the airspeed based kinematic model (AS-KM) [21]. Another benefit of using the airspeed based kinematic model (AS-KM) is that the aerodynamic forces and moments calculations are not required. As the accurate calculation of aerodynamic forces and moments is not possible, the kinematic model reduces the uncertainties for fault detection and isolation. Diverse schemes are suggested for the sensor fault detection and isolation (FDI) utilizing the AS-KM, such as double model adaptive approximation [22, 23], sliding mode technique [24] and adaptive Kalman filter [22, 25]. Sensors fault were also approximated by utilizing the same kinematic model [22, 24]. The suggested approach was validated by simulation which shows the effectiveness of innovative adaptive learning rate approach.
Fault detection and diagnosis are categorized into two classes such as linear algorithms [26, 27] and nonlinear algorithms [21, 28–34]. Both can be used for detection of faults in actuators and sensors. As most of the systems are nonlinear in nature so the linearized techniques may not provide detailed information about the faults in the system. Beside this fact, most of the researchers applied linear methods for fault detection due to their simplicity and low computational cost [26, 27].
In literature, most of the existing model-based fault detection and isolation (FDI) techniques are designed by using the linear time-invariant (LTI) models, these linear FDI schemes do not have the capabilities to detect and isolate faults with high preciseness in case of time-varying nonlinear systems [22]. Therefore, in order to enhance the accuracy of fault detection and isolation (FDI) schemes for nonlinear systems, numerous different nonlinear techniques such as Kalman Filter, sliding mode observer (SMO) [21, 30], neural networks [13, 32–37]s and fuzzy logic [34, 38] are proposed for the approximation of faults as well as parameter uncertainties of nonlinear systems.
Amongst these algorithms, neural networks (NN) are considered to be the most effective and efficient method, because of learning properties as well as approximation property of the nonlinear functions. Therefore, neural networks (NN) is the best mathematical technique for fault detection (FD). The use of adaptive neural networks has been increased significantly in last few decades [32–34]. One of the drawbacks of using conventional neural network algorithms is that the weight parameter are updated slowly, due to which they are not more effective in situation like abrupt faults. Therefore, numerous techniques are used to update the weight parameters of NN adaptively. The technique of updating the neural networks weights by utilizing Extended Kalman Filter (EKF) was presented by [39]. They implemented a strategy for satellite actuators fault detection utilizing neural network observer in which weights were updated by utilizing EKF. The designed algorithm lacks generality and is applicable only to a perticular category of nonlinear systems. Sensor faults which have great influence on system performance were also not included. Besides this, the proposed approach was not applied to nonlinear systems such as aircrafts which require quick fault detection system.
In this research article, the model-based novel nonlinear algorithm is designed for sensors fault detection and isolation of an aircraft. For establishing the effectiveness of the adaptive multi-layer neural network observer, Sliding Mode based fault-tolerant control is also designed based on the proposed observer. The learning parameters are updated by an adaptive learning rate technique in the designed algorithm. The key contribution and benefits of this research are summarized as; The adaptive multi-layer neural network (MLNN) observer based on a novel online adaptive technique called Lyapunov function theory (LFT) is proposed which shows more robustness to faults, disturbances and uncertainties compared previously used techniques such as [32, 40]. The purposed scheme provides high accuracy in the detection of various kinds of faults, in terms of magnitude as well as shape, without increasing the computational complexities and cost. In order to ensure the stability of the faulty system, fault-tolerant control (FTC) scheme based on Sliding Mode Control (SMC) is also designed for proposed adaptive MLNN observer, whereas in [41], they have proposed tracking control scheme instead of FTC. Fault-tolerant control (FTC) is an additional feature which was missing in the previous works [32, 40]. Compared to existing methods in literature, the proposed strategy is more effective in ensuring the fault detection and stability of the faulty system.
An adaptive fault-tolerant control scheme is also designed based on each observer. In previous work [32, 40], adaptive strategy was used without incorporating any fault-tolerant control scheme. However, in [41] tracking control algorithm is proposed without consideration of faults, while the strategy proposed in this article is specifically suggested for ensuring the stability of the system in the presence of the unknown faults.
The remainder of this paper is organized as follows. In Section 2, the system dynamical model is presented. In Section 3, fault detection strategy is discussed. In Section 4, sensors fault reconstruction are discussed. States approximation and faults reconstruction results under various faults are given in section 5, fault-tolerant control scheme and results are given in section 6, section 7 explains the effectiveness of the proposed strategies.
System’s dynamical model
For precise and effective fault detection (FD) and fault-tolerant control (FTC), accurate dynamical model of the system is required. In this section, the aircraft nonlinear dynamics is presented. Aileron (δ
A
), elevator (δ
E
), and rudder (δ
R
) deflectionsare the control inputs of the aircraft. The aircraft’s 6-DoF (Degree of freedom) nonlinear dynamical equations of motion are:
In this part, the suggested strategy for sensors fault detection is illustrated and different observers used for fault detection are explained.
Problem description
A general mathematical expression for a nonlinear system in the presence of faults and disturbances is given as;
Where, the symbols x (t) ∈ Rn and a : Rn → Rn are the state vector and state function of the system, b : Rn → Rn×m is the input function and u (t) ∈ Rm is the input vector, y (t) ∈ Rr is the output function, D ∈ Rn are the uncertainties and disturbances existing in the system, fs (x, t) and fA (x, t) represent sensor and actuator faults respectively. The fact of the existence of some disturbances, deficiencies and uncertainties in nonlinear systems, necessitates some sort of system to detect faults or failures in order to avoid any kind of damage to the system and its performance degradation. For this reason, an adaptive multi-layer neural network observer is proposed to detect any kind of fault or failure that may occur in the system’s sensors. For ensuring the stability of the faulty system, some assumptions are made which are given below [42].
The system dynamical model considered in this research is of Boeing 747 100/200 aircraft. To ensure more realistic and effective validation, noise is also added in the measurements. Thus validation of the performance of the proposed approaches is accomplished with noisy data. The standard deviations of the noises added in the sensors are given in Table 1. For proving the efficacious, preciseness and accuracy of the suggested strategy, therefore, noises are also considered in the system dynamics as shown in Table 1. The symbol σ (·) depicts the standard deviations of added noises.
Addition of Noises in Sensors
Addition of Noises in Sensors
Instead of considering the fault occurrence at a specific period or at specific time, in this study the occurrence of faults is considered randomly in order to validate the performance of the suggested method. The fault
Fault Statistics
This part of research concerns with the problem of fault reconstruction. Various types of faults are considered such as abrupt, intermittent, incipient and simultaneous faults in order to avoid any kind of failure or damage such as aircraft crashes.
Detection of simultaneous faults is a difficult task for a fault detection system. Occurrences of multiple faults are also considered in this research work, as multiple sensors can have faults simultaneously.
Intermittent faults occur in irregular intervals and are very common. Detection of these faults is very difficult due to their irregular occurrence. These faults can take place due to various reasons such as the inappropriate connection of wires to the sensors. The probability of occurrences of these faults is enhanced with the complexity of the system.
Detection of incipient faults is difficult for any fault detection system due to their small influence on residuals. Incipient faults usually occur due to some deficiency in sensors or due to their partial failure. The mathematical representation of incipient faults is given as;
Where, ω depicts the fault evolution rate and for incipient faults the value of ω is small. By utilizing the larger value of ωthe fault is changed into step form which is defined as abrupt fault or failure.
Abrupt faults occur due to sudden changes in parametric values, the response of these faults is more rapid compared to the nominal dynamic process. Tracking of such rapid changes and variations is a challenging task for detection systems. In this research, three different types of abrupt faults are taken into account, as shown in Fig. 1, which can take place due to several reasons such as short circuit, metal flakes separation and intense vibrations. Such faults are considered for the validation and testing of the suggested strategy.

Types of Abrupt Faults.
In this research, the multi-layer neural network (MLNN) observer [43] is used for the fault detection and isolation of the aircraft sensors. Therefore, the general mathematical model of the MLNN observer is presented in this section.
In above Fig. 2, the states x1, x1, …. x
n
depict the input states to neural network and the states y1, y1, …. y
n
depict the output states of the neural network. In this specific problem, the Gyro rate sensor faults are detected and isolated, therefore, p, q and r are the input states to neural network obtained from the system given in Equations (1–8) and
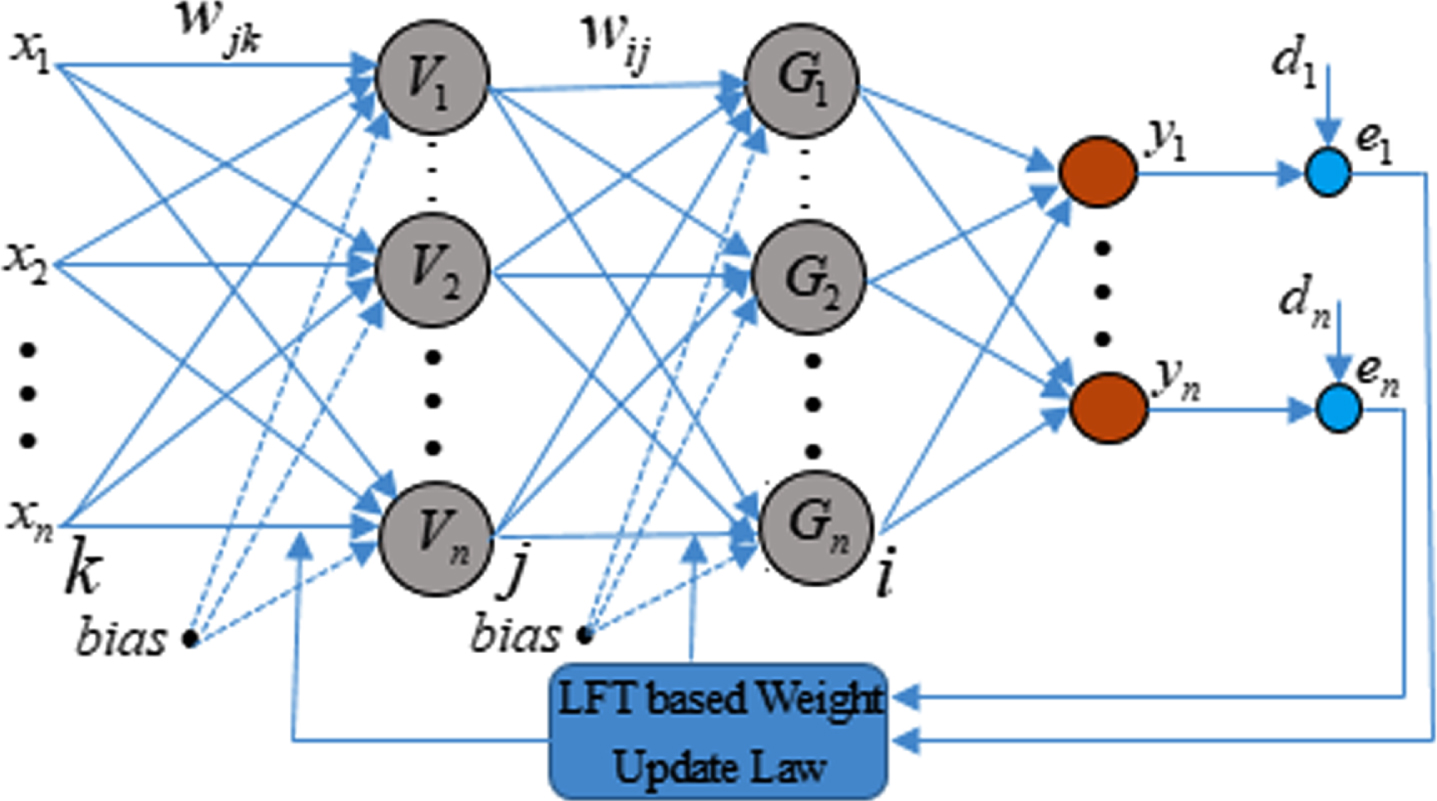
Multi-layer Neural Network Structure.
The output of the jth neuron of the network is given as;
The term v j is the general for representing the outputs of the first hidden layer of MLNN.
Where
The term y
i
is the general for representing the outputs of the second hidden layer of MLNN. Where
The generalized form for the weight update law for the output layer is given as [43];
Where
Where
v
i
l-1
is the output of ith neuron of layer l - 1.
The common activation function that is used in multilayer perceptron is sigmoidal nonlinearity and the general mathematical expression of which is given as;
By applying the nonlinearity rule, the range of output is 0 < y < 1. Differentiating Equation (16) yields;
The Equations (16–17) representing the nonlinear activation functions which are used in Equations (11–12) for obtaining the output of the hidden layers of MLNN. Activation functions given in Equations (11–12) and (16–17) are different forms of activation functions, the main purpose of these nonlinear activation functions is to train the MLNN. Initial conditions used for the training of the MLNN can be observed in Table 3 Appendix B.
Root Mean Square Error (RMSE) Comparison for Sensors
For rapid faults detection, neural network weights need to be updated. In this section, an adaptive weight updating algorithm based on Lyapunov Stability Theory is presented. The main purpose of the algorithm is to update the neural network weight parameters online with a rapid convergence learning rate. The main purpose of the adaptive learning rate is to obtain global convergence for highly nonlinear functions without enhancing the computational complexities and costs.
In gradient-decent, the learning rate is kept fixed or constant, for the purpose of avoiding local minima and for ensuring global minima, it is needed to have a large learning rate for a situation far away from the global minimum and a small learning rate for a situation close to the local minima. For such conditions and situations, adaptive learning rate plays an important role.
The Lyapunov stability theory is widely used in autonomous control systems. If a Lyapunov function candidate V ((x, t) , t) is chosen such that:
Then, such a system is called asymptotically stable system.
L > 0 on
It is a strictly Lyapunov function when in addition.
The term F(X) is the general form representing the dynamics of the system like the aircraft dynamics given in Equations (1–8).
As the neural network is comprised of weights, inputs, and outputs, the mathematical representation is:
y
p
is the desired output and
Where
The time derivation of Equation (19) and by applying the product rule such that
Now to find
Where
Therefore,
By substituting
Since
The instantaneous weight update law using Lyapunov Function algorithm can be finally expressed in the difference equation model as follows;
Where p represents each pattern and μ1 = μλ and the acceleration
∴Δt is taken to be one time unit for simulation.
By applying the Gradient Descent rule to
Thus, the weight update equation for Gradient Descent can be written as;
Where
The global minimum for V is defined as;
The local minimum is analyzed through the following conditions and
Rewriting the weight update law as;
By considering the point B as shown in Fig. 3, at time interval of (t –1), the weight update computation for the time interval [t - 1, t].
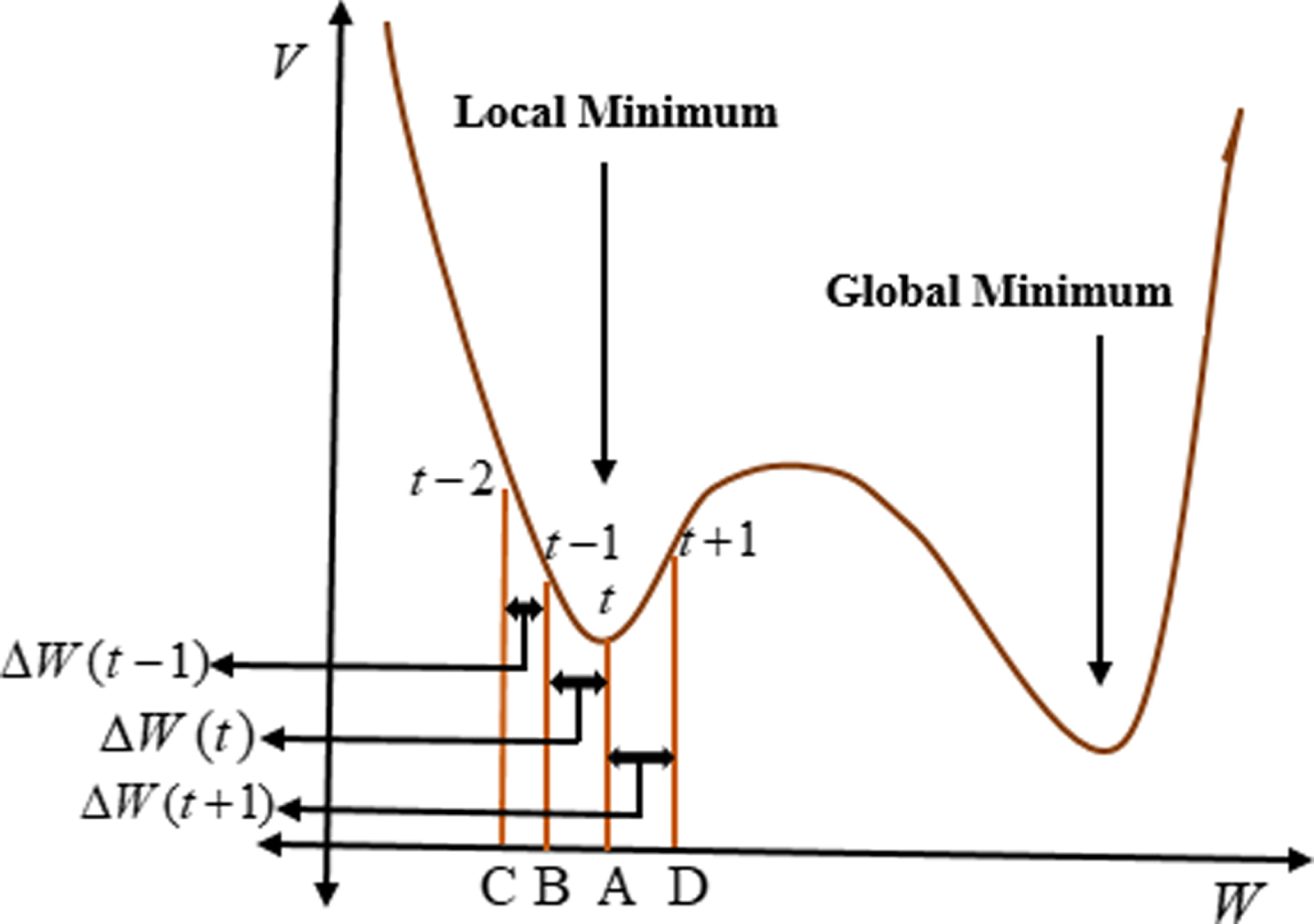
Global minima and local minima illustration.
It can be observed that ΔW (t - 1) < ΔW (t - 2) because of the decrease in the velocity towards local minima and ΔW (t) >0 speed increases and the local minimum is avoided. By considering the point A at a time interval (t), the weight increments are defined as;
Hence, the local minima is avoided By considering the point D at time interval.
Because of the back-propagation term approaches to zero as the slope
Hence, the local minima is avoided.
In this part, the high gain observer design is described. The general mathematical form of the high gain observer is defined as;
Where the terms [x1x2x3 ….. x
n
] depict the system state vector,
For the nonlinear system, if p, q and rare the roll, pitch and yaw measurement variables of gyro rate sensors then the high gain observer is designed as; as it is required to detect faults in Gyro rate sensors then by using Equations 1–8, the roll, pitch and yaw rate sensor equations can be written as;
Roll rate sensor:
Pitch rate sensor:
Yaw rate sensor:
In case of pitch rate sensor, if p is the measurement variable then by using the Equation (30), the high gain observer for pitch rate sensor is defined as;
Where the term p is the measured value obtained from the system given in Equation (1) and
The role of variables a1, and a2is to make the system Hurwitz.
The observed errors are defined as
Where,
Because of
So the equation of observer error is defined as
Hence, λ2 + a1λ + a2 = 0.
The design of a
i
(i = 1, 2), for the requirement of expression λ2 + a1λ + a2 = 0 to be negative. As for the stability of the system and for the design of observer, the real parts of the system equation must be negative; therefore, the matrix
By the utilization of the stability theory, for any random positive-definite matrix Q ∈ R3, there exists a positive definite symmetrical solution P given in the following Lyapunov equation.
For the system observing error, the Lyapunov equation is utilized given below:
Therefore,
Therefore,
Where, the variable λ
min
depicts the minimum value
From the above analysis, it is concluded that the convergence velocity of the observing error η is dependent on the parameter ɛ. When the parameter ɛ has a very small value, then the error dynamics is a rapid variant sub-system. Smaller the ɛ, the more abrupt the convergent velocity of the error dynamic η is ∥η ∥ is O (ɛ), similarly, with decreasing the value of ɛ, the observing error approaches to zero.
The above stability analysis is proved for the case of roll rate sensor, similar procedure is followed for the pitch and yaw rate sensors.
In this section, faults reconstruction and states approximation results based on three different strategies namely adaptive multi-layer neural network observer, conventional multi-layer neural network observer and high gain observer are presented. The model of aircraft used for this purpose is Boeing 747 100/200. The different categories of faults given in section 4 and the disturbances shown in Table 1 are supposed to be present. Figure 4 shows the strategy adopted for the fault detection and isolation based on the new proposed strategy in this research. The main purpose of this strategy is to approximate and reconstruct the faults in terms of the magnitude, shape and time occurrences. In Fig. 4, the outputs
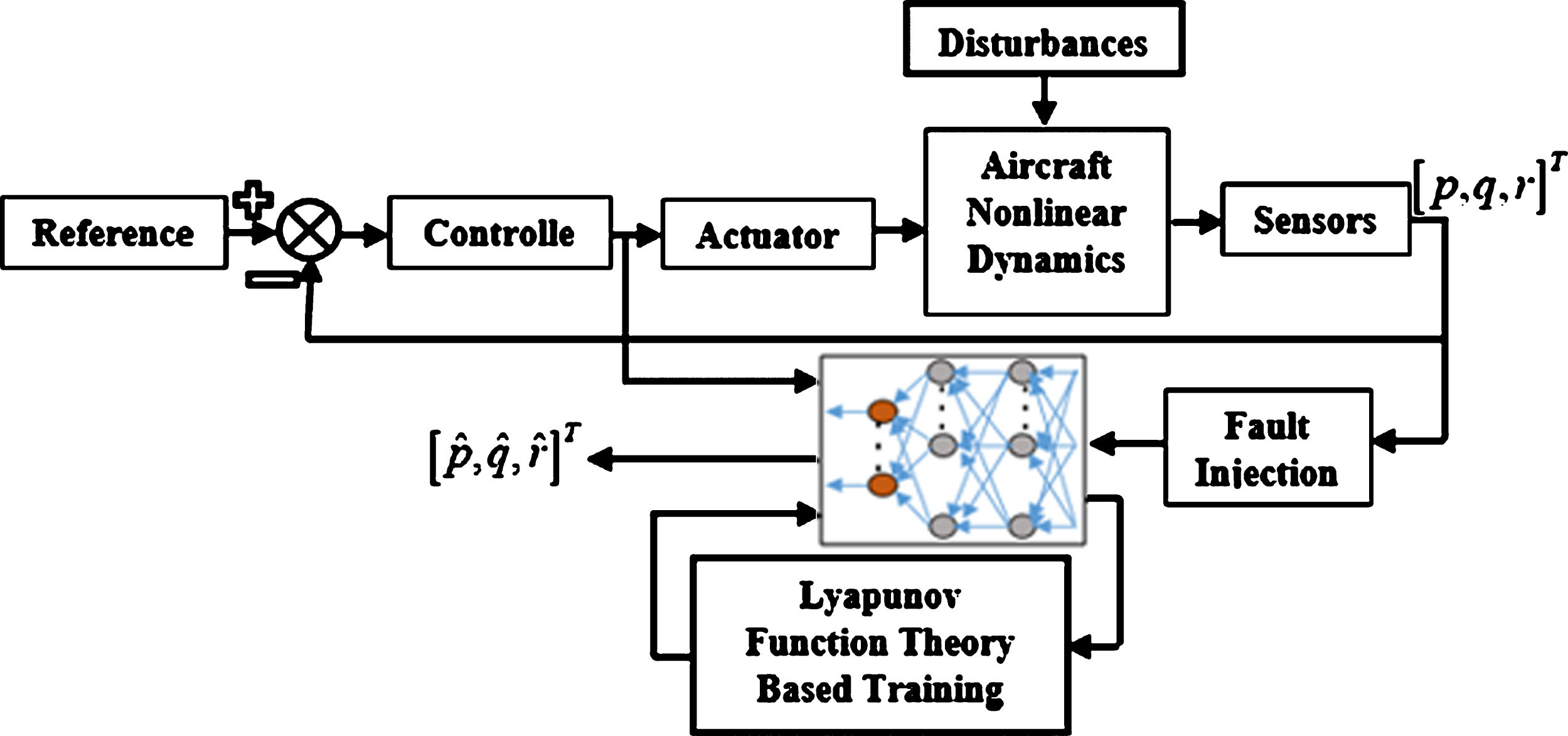
Fault Reconstruction Strategy Illustration.
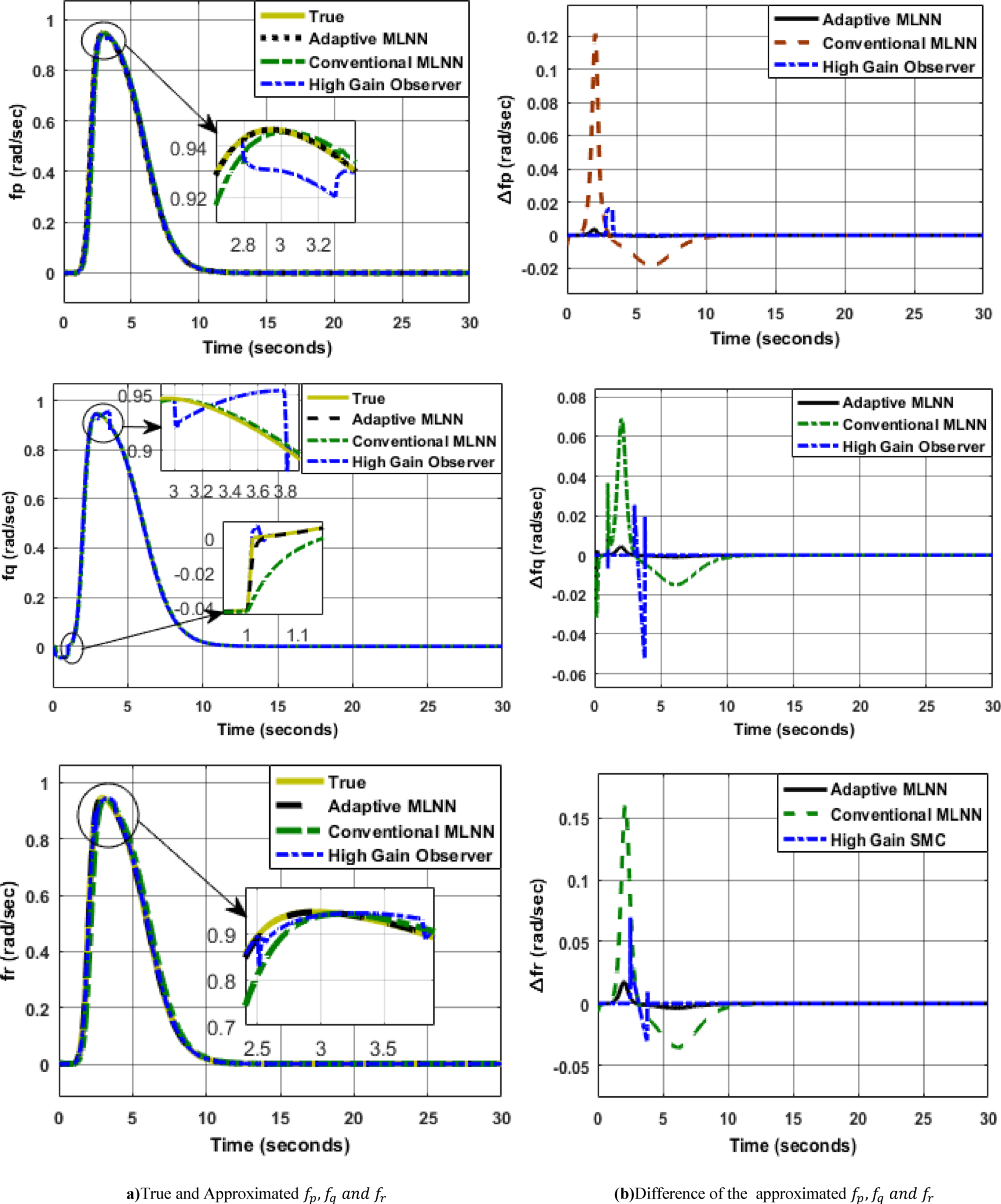
The results of faults reconstruction are shown in the following figures. The estimated faults
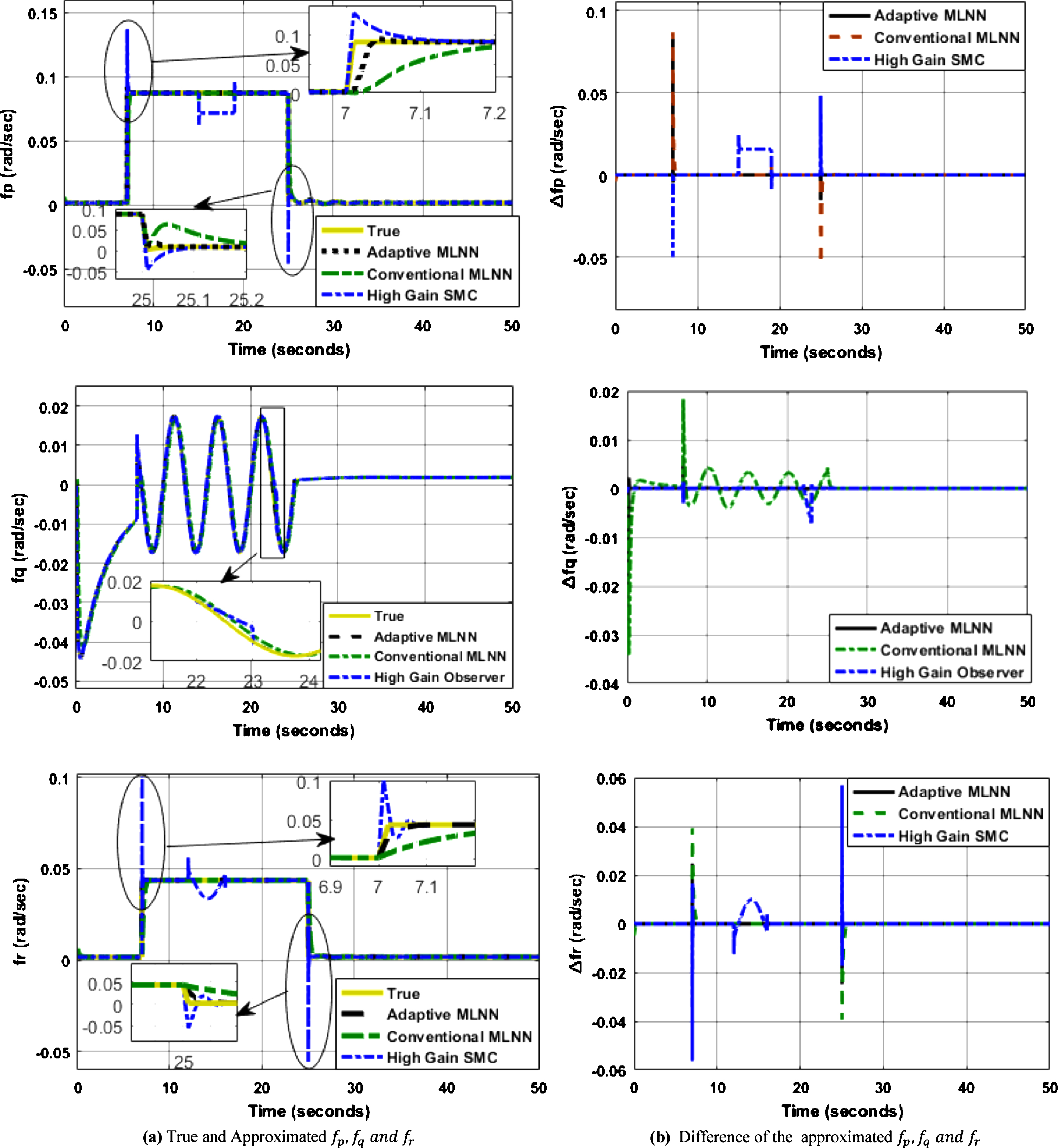
Comparison of Three Strategies based on Rectangular and Oscillatory Biases.
After reconstruction of faults
In approximation of
In the case of oscillatory fault reconstruction in
In Fig. 6(a) and 6(b), the approximated
Comparison of Three Strategies based on Sigmoidal Fault.
In Fig. 7(a) and 7(b), the incipient fault based results are presented and the performance of the three observers is compared. It can be seen that the performance of adaptive MLNN is much better as compared to other two observers. For incipient fault based reconstruction (
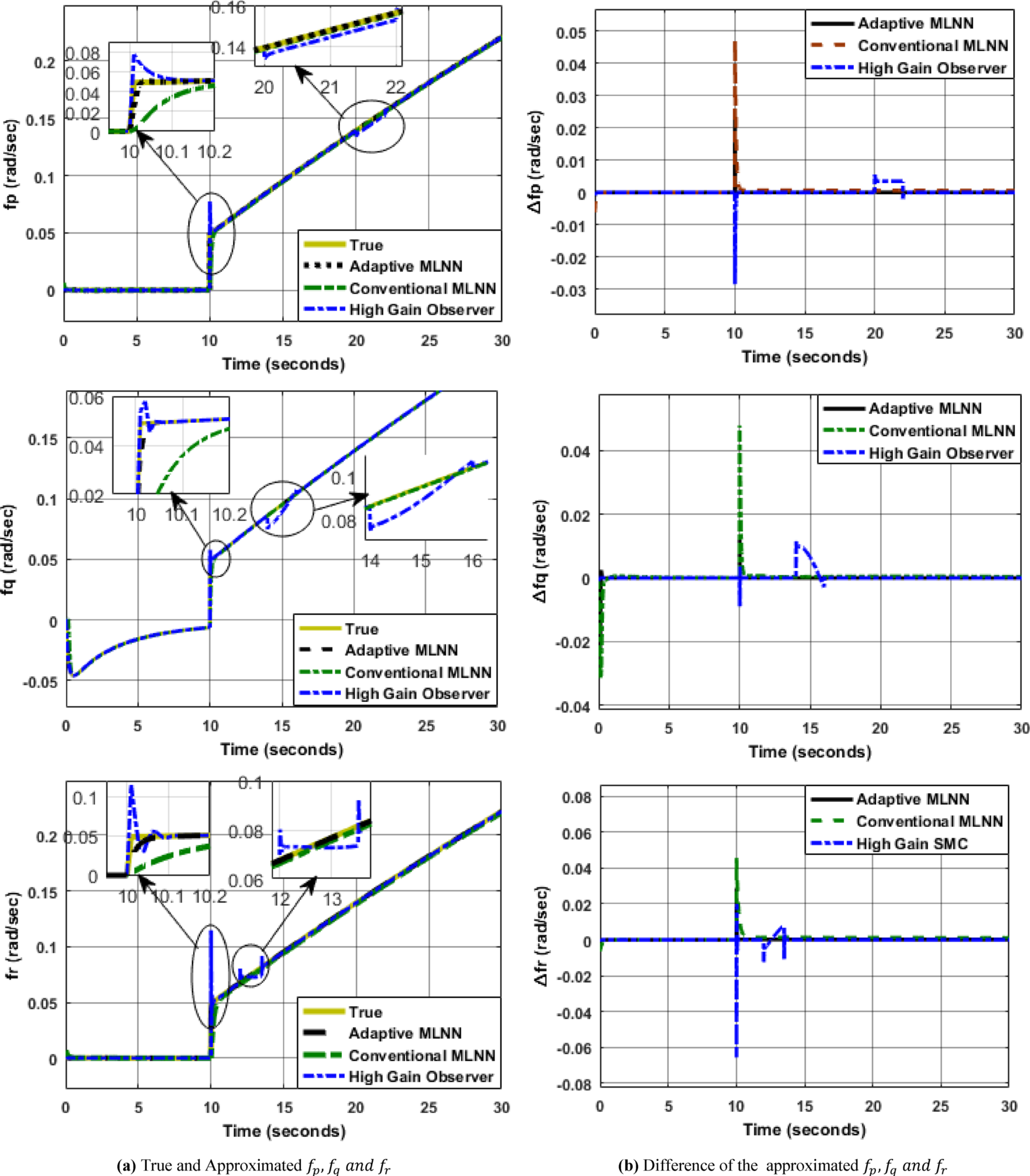
Comparison of Three Strategies based on Incipient Fault.
Figures 8(a) and 8(b) show the results based on intermittent faults reconstruction, by comparing the results of approximated faults
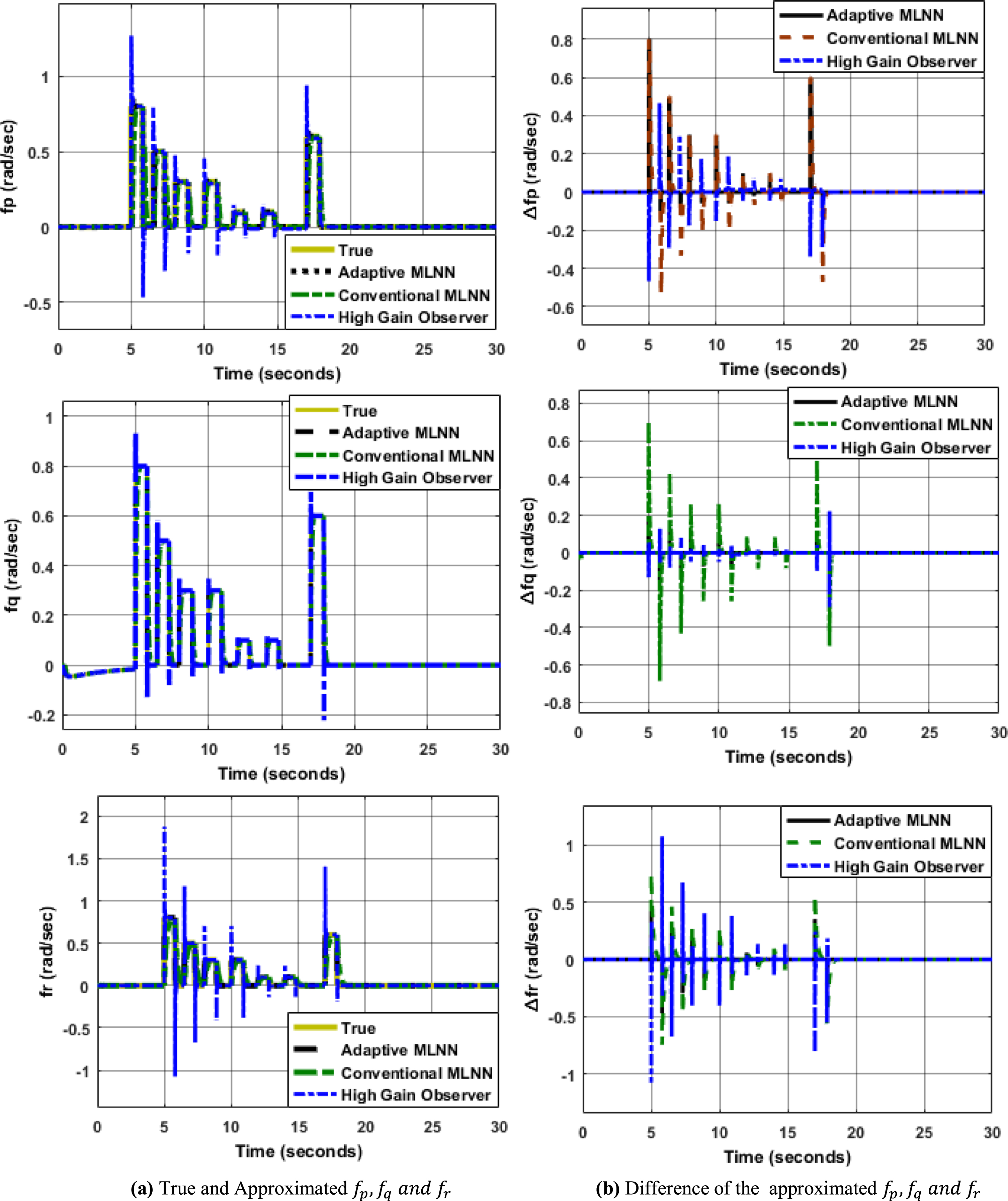
Comparison of Three Strategies based on Intermittent Fault.
In the Fig. 9, results based on simultaneous faults are presented. Two kinds of faults are injected simultaneously, the rectangular fault in pitch rate p and triangular fault in yaw rate r. Different deviations during different time durations such as 7s < t < 7.3s, 10s < t < 18s and 25s < t < 25.4s in
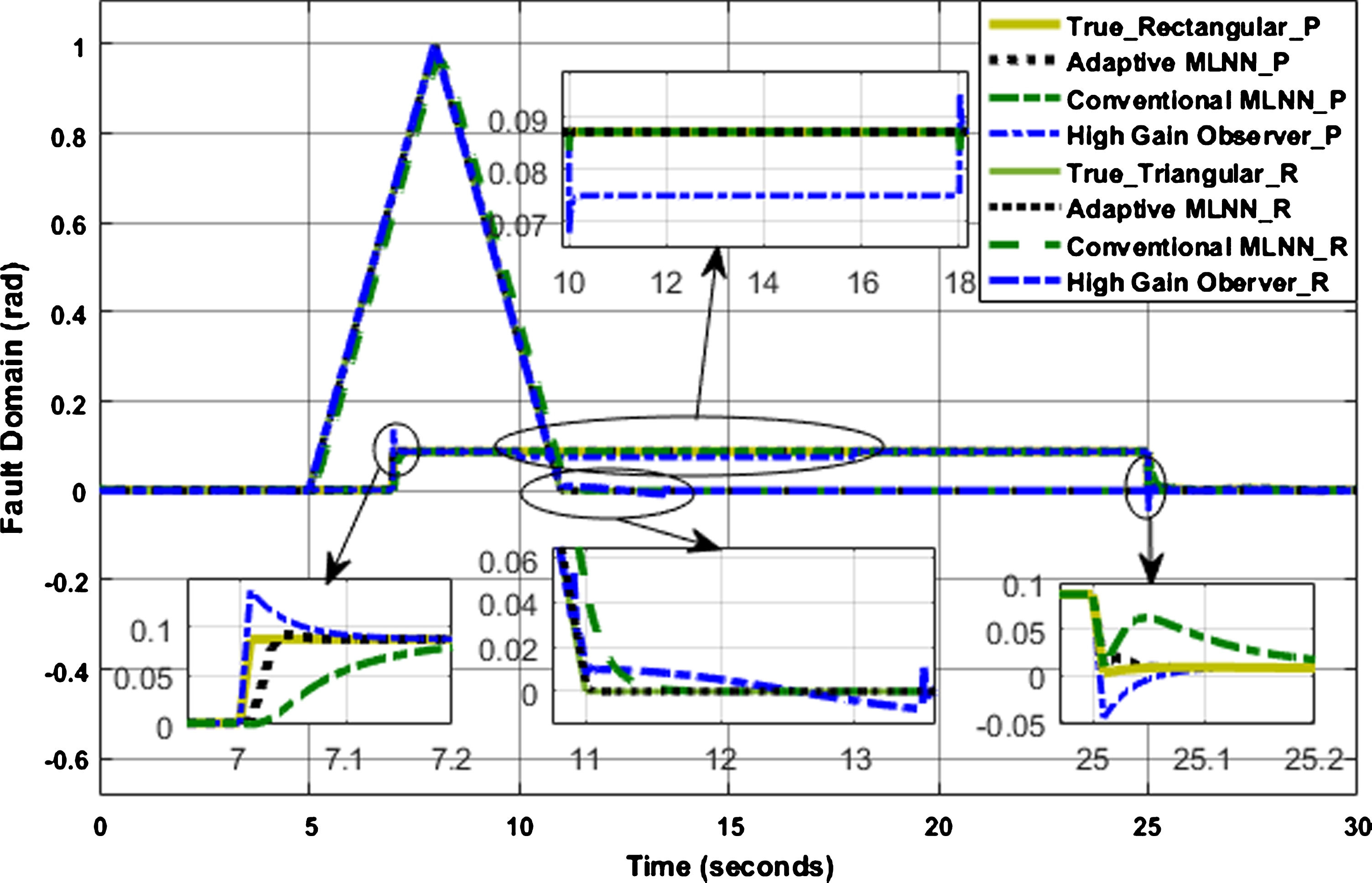
Comparison of Three Strategies based on Simultaneous Fault.
In order to evaluate the effectiveness of our proposed algorithm, MLNN based on adaptive learning rate, over the pure MLNN with fixed learning rate, the root mean square error (RMSE) of both algorithms is also calculated and compared as shown in Table 3.
The RMSE is mathematically represented as:
Where, y D i is the detected fault and y i is the actual fault and N is the total number of simulation samples. From Table 3, it is clear that the adaptive Multi-Layer neural network has less RMSE compared to conventional Multi-Layer neural and high gain observer. It has also been proved that the neural network with adaptive MLNN shows much better response compared to conventional MLNN and high gain observer. The sudden and sharp changes have always importance and significance for aircrafts and they have a great impact on the performance of aircrafts, even small faults can lead to a big failure, therefore, it is important for aircrafts to have such algorithms which can detect faults much faster with much better accuracy and preciseness to avoid any kind of failure. The presented strategy adaptive MLNN is capable of, to detect faults more rapidly with high accuracy and preciseness and has the ability to enhance the safety as well.
In this section, a fault-tolerant control scheme based on sliding mode control (SMC) is designed. The main purpose of this scheme is to maintain the stability of the system and to achieve the desired trajectory in presence of faults in Gyro rate sensors such as roll rate p, yaw rate r and pitch rate q. The SMC based FTC scheme is designed for all three observers separately for the purpose of comparing the effectiveness and performance of FTC based on different observer strategies.
The basic sliding mode control (SMC) design process is accomplished in two steps. In the first step, the sliding surface is designed according to trajectory tracking error, and in the second step a suitable Lyapunov function is designed that satisfies the sliding surface conditions. Because of such sliding regime, the closed-loop control system becomes insensitive and robust to any kind of faults/failures, disturbances, modeling and parameter uncertainties. The main purpose of the FTC scheme is to following or tracking of desired trajectories that represent the translation and rotational motions in the presence of Gyro rate sensors fault.
Suppose the nonlinear system is represented by the following mathematical expression;
Where x is the positional signal and
In this section, the control laws are derived based on neural network observers and high gain observers. The observed values such as
Suppose that r is the desired trajectory then the errors are computed as;
Where the terms pand θ are the measured values obtained from the system given in Equations (1–8).
Therefore, we get
The sliding mode surface is defined as;
Where variable c is a positive constant. The observing sliding mode surface is defined as;
and the observing errors are defined as;
Therefore, we get
The Lyapunov function is defined as;
By differentiation of Equation (55) we get
The selected control law is defined as;
Where, l > l
f
> 0, therefore
Because of the convergence property of the observer the terms
The above control law is derived for the roll rate sensor, similarly control procedure is followed for the pitch and yaw control laws.
In this section, the performance of the proposed FTC scheme is tested through various kinds of sensor faults. The FTC based on three different observers adaptive MLNN, conventional MLNN, and the high gain observer is proposed and their performance is compared. The three controllers in the presence of different faults are compared, it can be clearly seen that the FTC scheme performance based on adaptive MLNN is better than the other two strategies. The Fig. 10 shows the adopted strategy for fault tolerance control (FTC) based on the strategy proposed in this research.
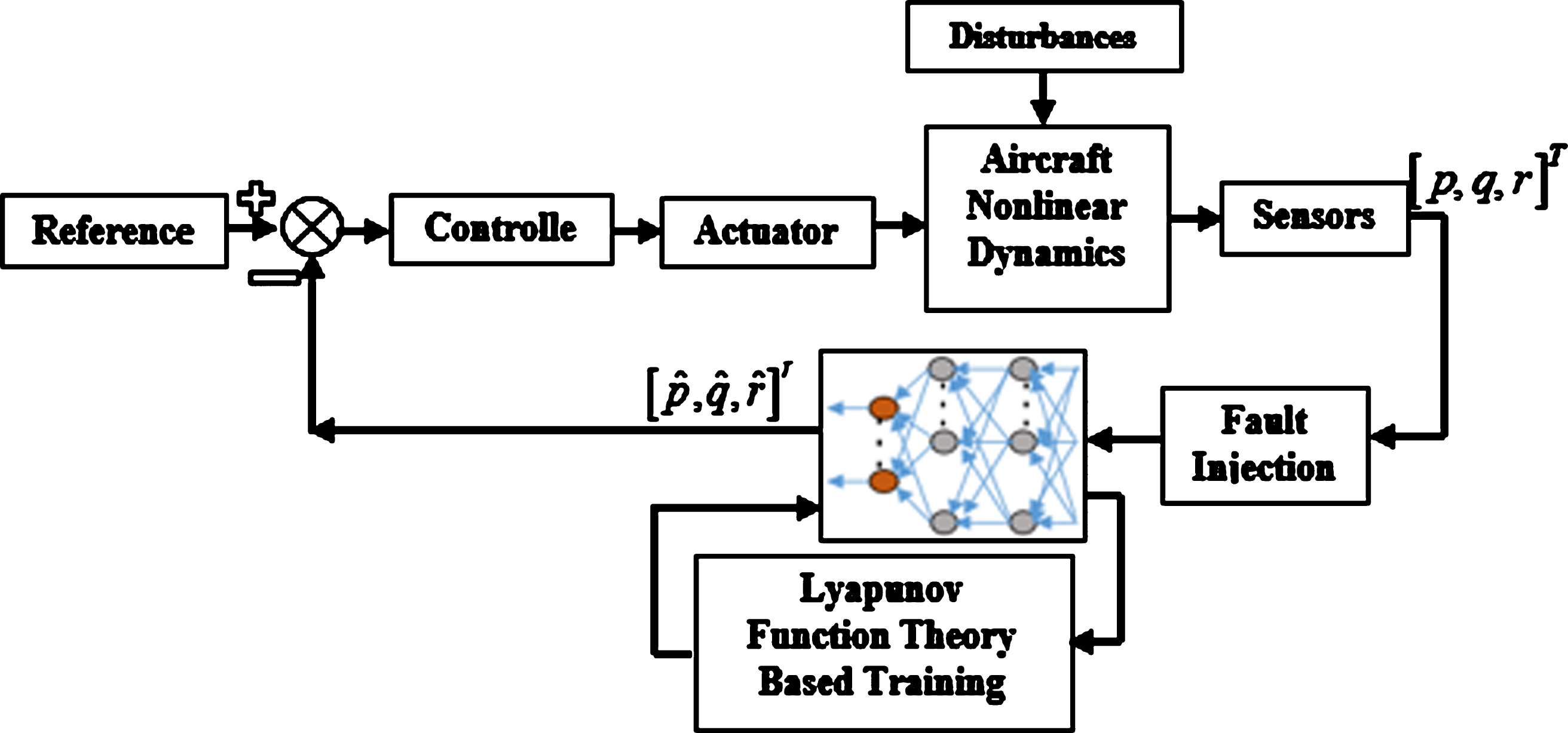
Fault-tolerant Control (FTC) Scheme Illustration.
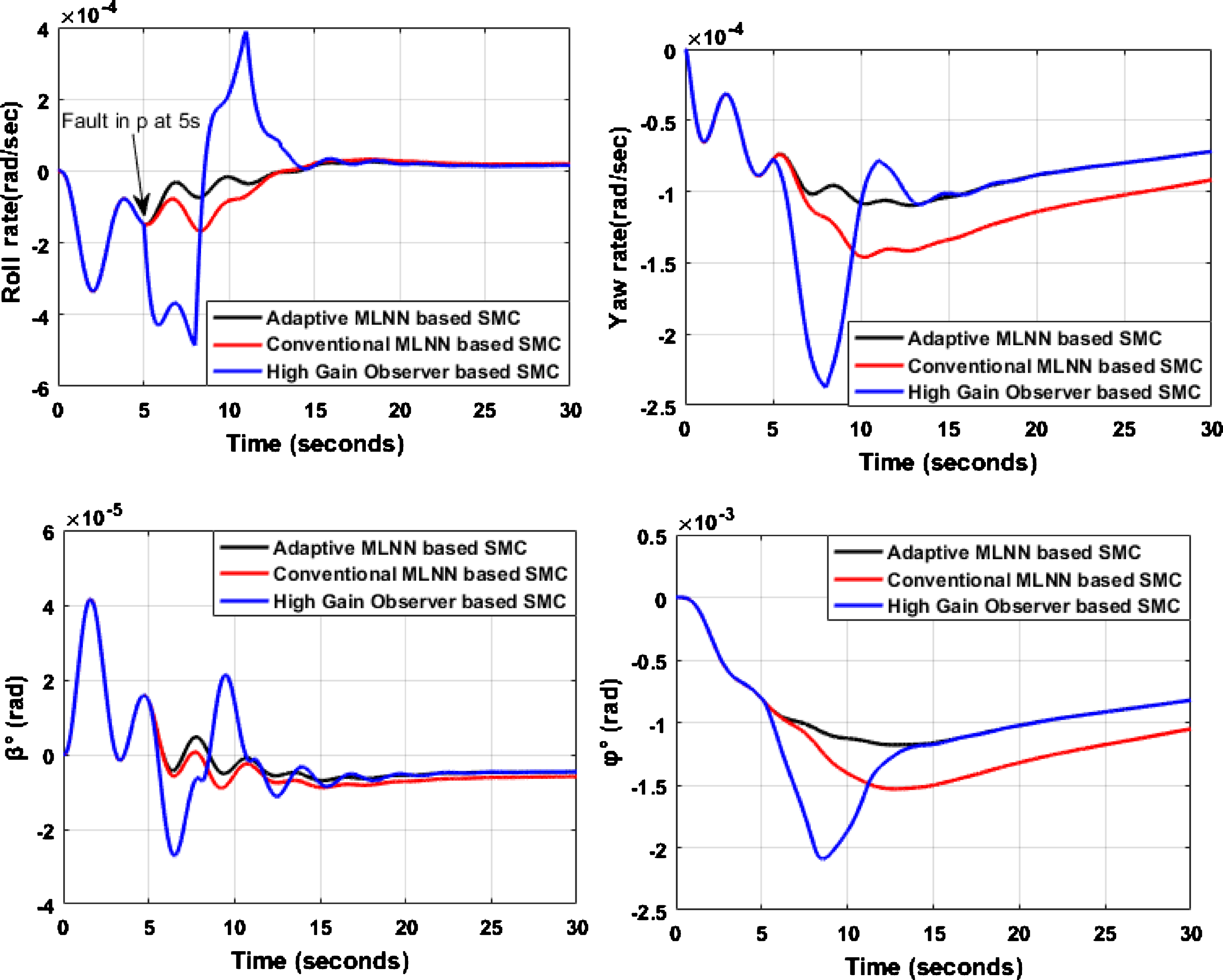
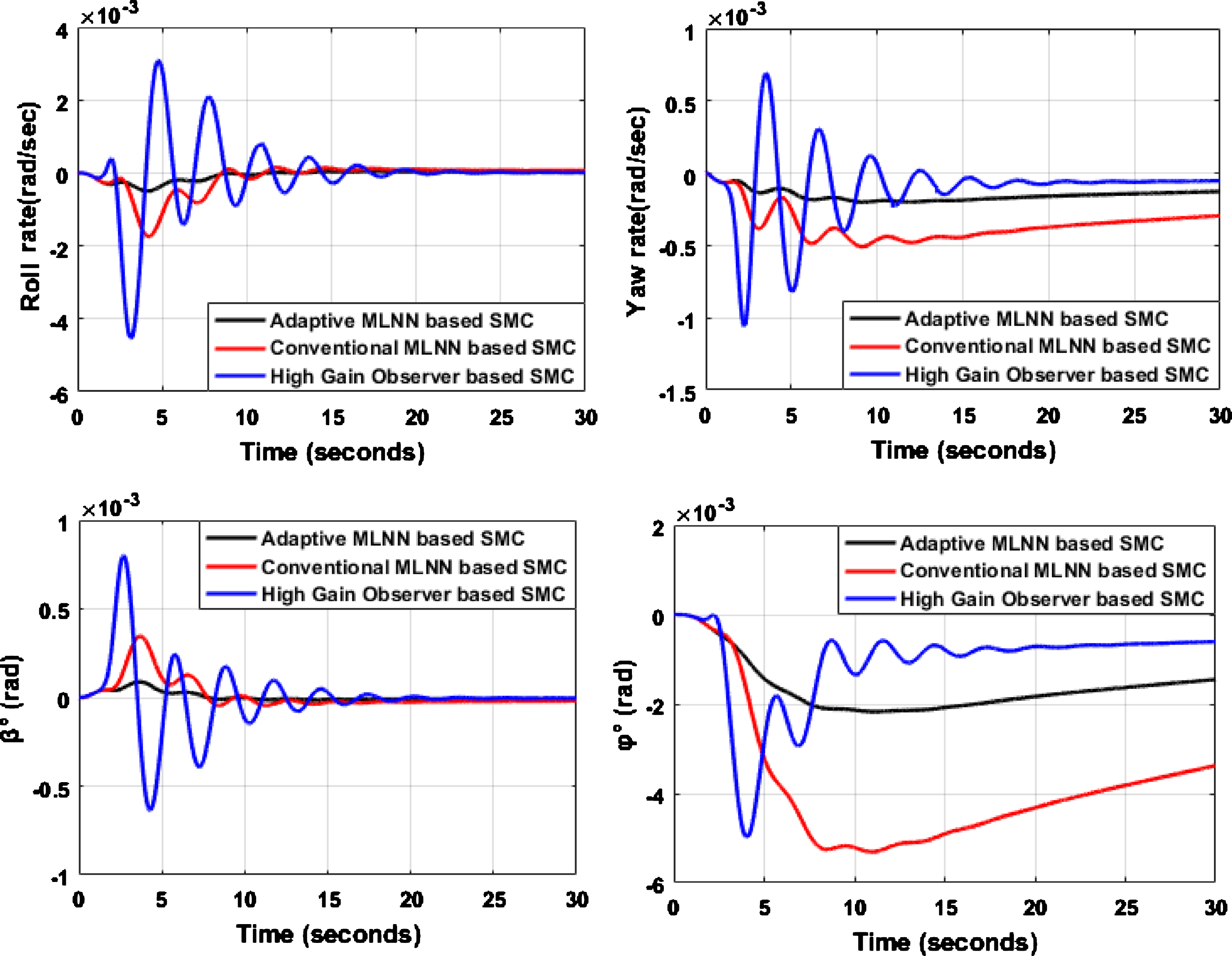
In this part, various fault-tolerant control schemes are presented under different kinds of faults in roll rate p. Three different types of fault-tolerant control schemes such as adaptive MLNN based SMC, conventional MLNN based SMC and high gain observer based SMC are compared by utilizing the different lateral dynamics such roll rate p, yaw rate r, sideslip angle β and roll angle φ.
Figure 11 shows the effect of intermittent fault in p at 7 s, the results show that the performance of roll rate p and sideslip angle β is not degraded in case of adaptive MLNN based SMC and conventional MLNN based SMC but the results based on high gain observer based SMC are much degraded having more oscillations and overshoot from the desired path. In case of states, yaw rate r and roll angle φ, both the conventional MLNN and high gain observer based SMC show degradation, therefore, adaptive MLNN based SMC is more effective in case of an intermittent fault in achieving the desired trajectory.

FTC performance due to intermittent fault in roll rate p.
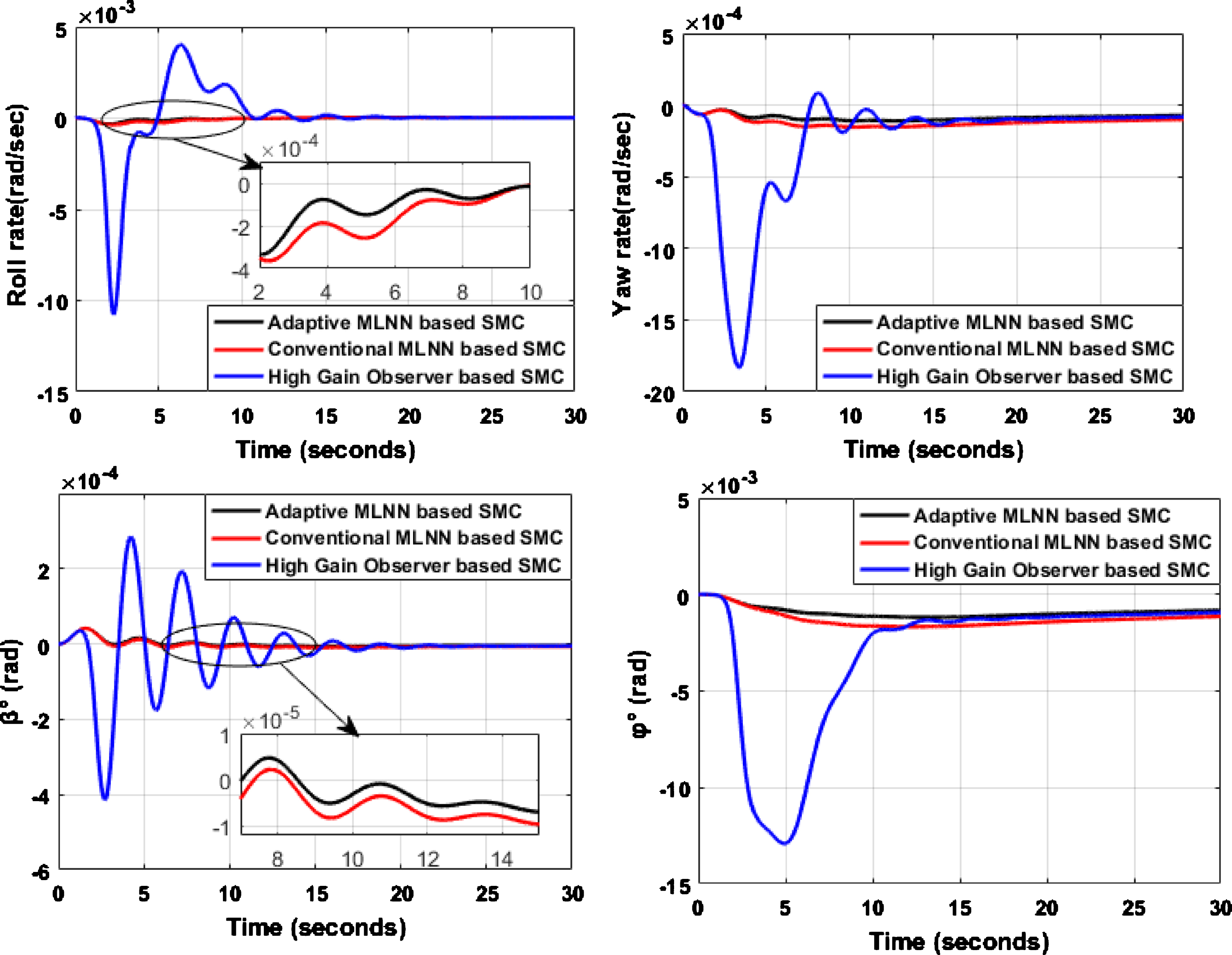
Figure 12 shows the performance of fault-tolerant control (FTC) scheme in case of triangular fault in roll rate p at 5 s. It can be clearly seen that the conventional MLNN based SMC and high gain observer based SMC results are much degraded after the occurrence of a triangular fault in p. Therefore, the adaptive MLNN based SMC scheme shows greater robustness in maintaining the stability of the system.
FTC performance due to triangular fault in roll rate p.
In Fig. 13, sigmoidal fault based results are compared, it can be observed that performance of conventional and adaptive MLNN based results are comparable but high gain observer based control scheme is showing greater oscillations along the desired path. Therefore, adaptive MLNN based control scheme is much better in achieving the desired path.
FTC performance due to Sigmoidal fault in roll rate p.
In this section, results of all the three FTC schemes in the pressence of different faults in yaw rate r are presented. In Fig. 14 intermittent faults based results are shown, it can be seen that results of all three FTC schemes are comparable but adaptive MLNN based FTC still shows better performance in maintaining the stability of the system and has lesser deviations, oscillations and overshoot as compared to other two schemes. In Fig. 15, performance of different FTC schemes are investigated based on triangular fault in yaw rate r. It can be clearly observed that the adaptive MLNN based FTC scheme is much better in acquiring the stability of the system and has lesser overshoot after the occurrence of the fault. Thus, the proposed scheme responds more effectively to the fault as compared to the conventional and high gain observer based FTC. In case of sigmoidal fault, as shown in Fig. 16, it is proved that the proposed adaptive MLNN based FTC scheme is much better, effective and robust in achieving the desired path as compared to other two schemes. Conventional MLNN FTC and high gain observer FTC have larger deviations especially the high gain observer FTC has much overshoot and deviations in achieving the desired path. Therefore, adaptive MLNN based FTC is better and robust in achieving the path.

FTC performance due to intermittent fault in yaw rate r.
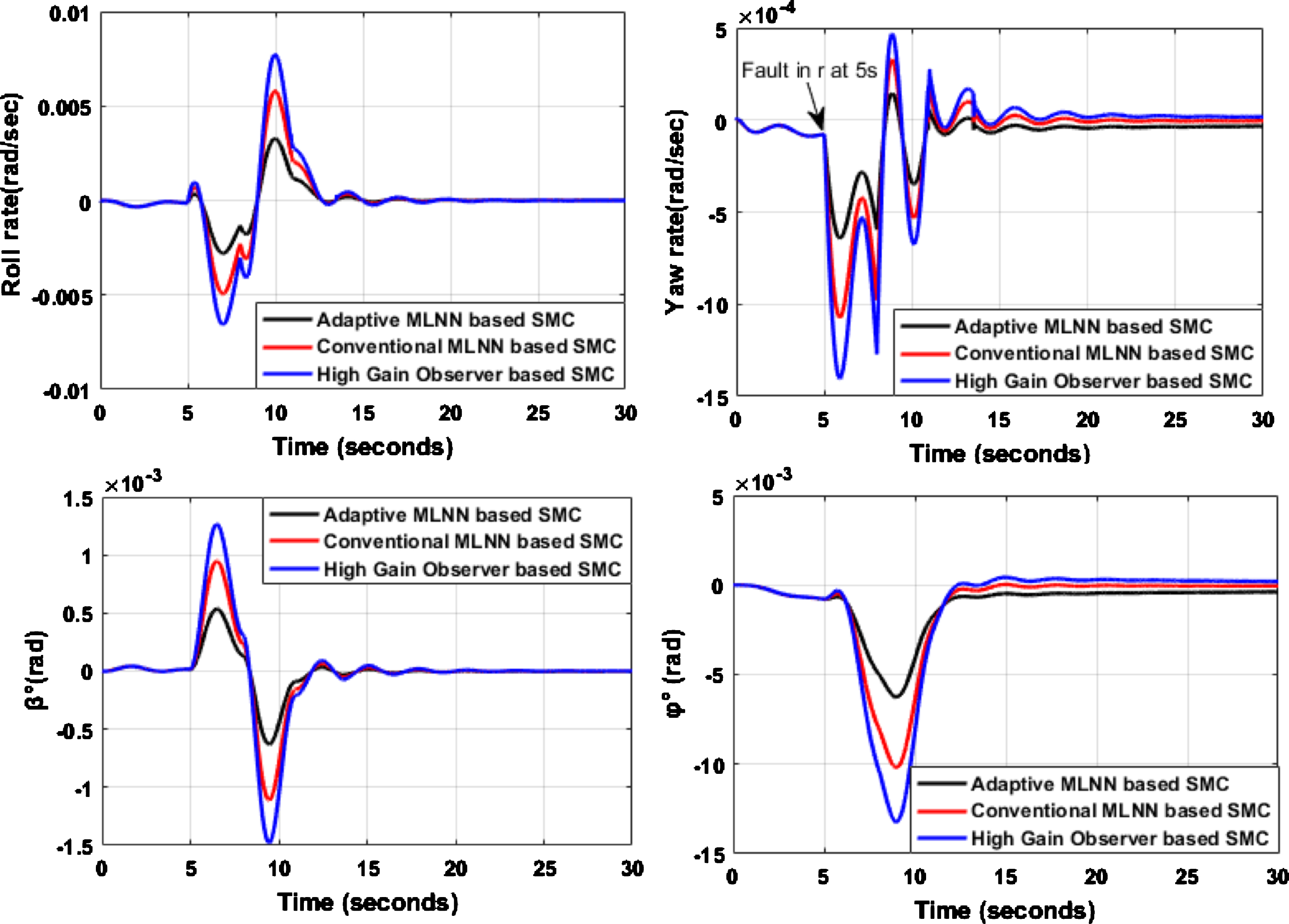
FTC performance due to triangular fault in yaw rate r.
FTC performance due to sigmoidal fault in yaw rate r.
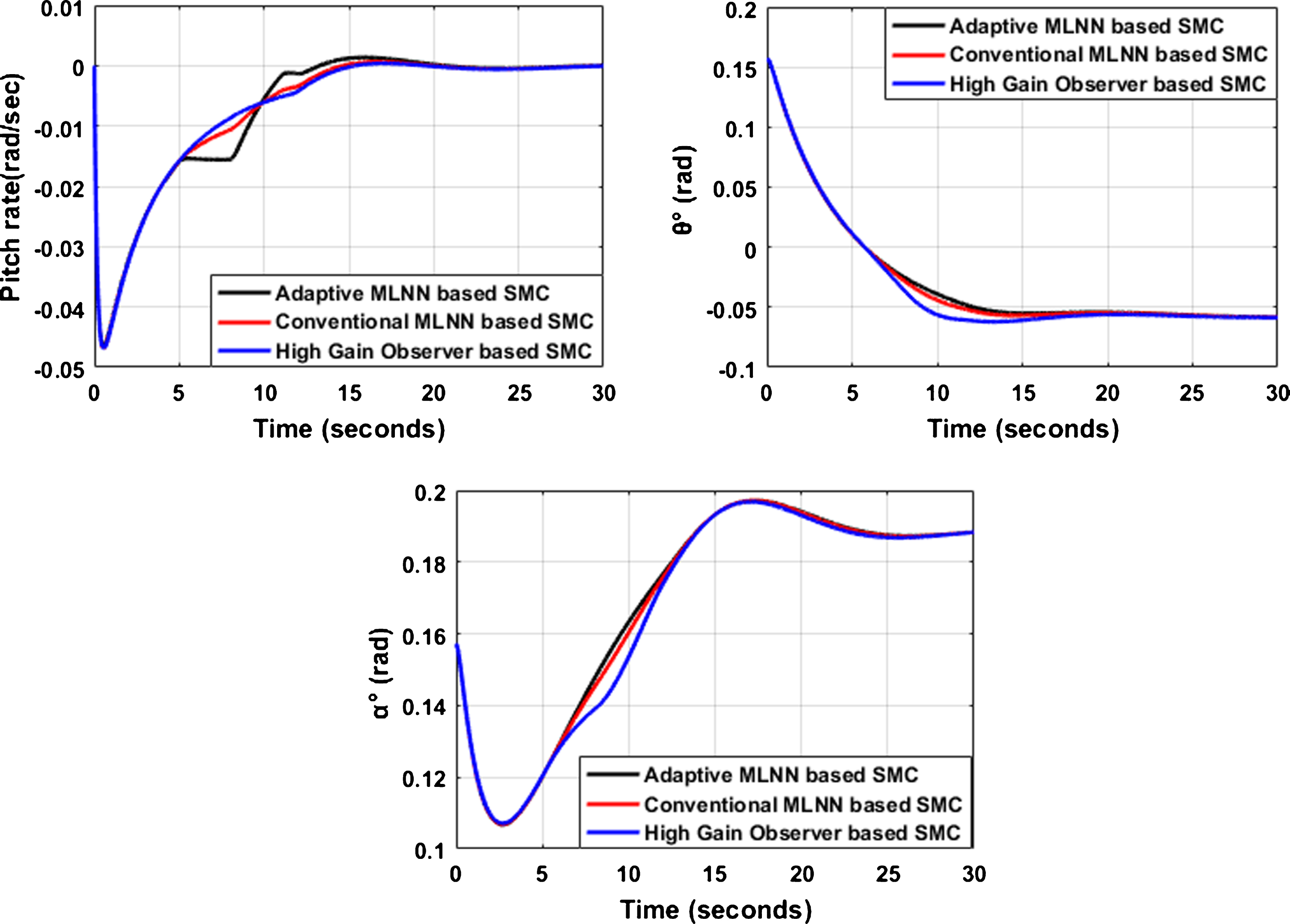
In this section, performance of SMC based FTC schemes in the presence of various faults in pitch rate q is compared. All the three FTC schemes are compared by considering the longitudinal dynamics states such as pitch rate q, pitch angle θ and angle of attack α. Intermittent fault based results are shown in Fig. 17, it can observed that after the occurrence of fault at 5 s, in state pitch rate q, the conventional MLNN and high gain observer based FTC shows some oscillations and deviations while the adaptive MLNN based FTC has smooth performance in achieving the desired path as well as showing good performance in other states θ and α. In Figs. 18 and 19, results are based on triangular fault and sigmoidal fault in pitch rate q, by comparing and observing the performances of all fault-tolerant control (FTC) schemes, it is proved that the adaptive MLNN based FTC scheme is much better and robust in maintaining stability and achieving the desired path.

FTC performance due to intermittent fault in pitch rate q.
FTC performance due to triangular fault in pitch rate q.

FTC performance due to sigmoidal fault in pitch rate q.
A new strategy for aircraft sensor fault reconstruction using the Lyapunov function theory for adaptively updating the weights of neural networks is proposed. Adaptive multi-layer neural network (MLNN) approach is developed for the approximation and reconstruction of faults and states. MLNN parameter weights for faults approximation are adaptively updated by the proposed adaptive learning rate strategy. The faults and states approximation performance of the proposed strategy is compared with the conventional MLNN, high gain observer and another approach used in literature [32, 40]. Numerous fault types and conditions are considered to authenticate the efficiency of the proposed strategy. Desired trajectories were acquired in the presence of faults or failures of sensors and uncertain measurements were approximated effectively by using the proposed strategy. The performance of the proposed adaptive multi-layer neural network (MLNN) strategy outweighs other approaches in the approximation and reconstruction of faults and states.
A fault-tolerant control (FTC) strategy is also proposed. FTC is designed separately for each observer for ensuring the stability of the system in the presence of faults. After thorough evaluation of performance of all the strategies, it is established that the FTC based on proposed adaptive MLNN shows better robustness to situations such as disturbances and uncertainties compared to [41].
It is concluded that the proposed strategy can be integrated into aircraft system for the purpose of both faults diagnosis and isolation and FTC scheme for increasing the performance of the system.
Declaration of conflicting interest
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Footnotes
Acknowledgments
I am grateful to all the reviewers for reviewing my paper. This research is supported by, National Natural Science Foundation of China (61773245, 61806113, 61873048, 91848206, 61973200, 62073199), the Natural Science Foundation of Shandong Province (ZR2018ZC0436), and Taishan Scholarship Construction Engineering.
Appendix A: Nomenclature
| Parameter | Definition |
| L | Lift, [N] |
| D | Drag, [N] |
| g | Gravitational acceleration, [m/s2] |
| T | Thrust, [N] |
| v | velocity, [m/s] |
| ρ | Air density, kg/m3 |
| p, q, r | Aircraft angular velocity about x, y, z axes, [rad/s] |
| δ a , δ e , δ r | Aileron, elevator, rudder deflection, [rad] |
| S | Wing area, [m2] |
| m | Mass, [kg] |
| β | Sideslip angle, [rad] |
| α | Angle of attack, [rad] |
| I x , I y , I z | Moment of inertia, [kg. m2] |
| φ (.) | Neural Network activation function |
| w | NN weight parameter |
| η | NN learning rate parameter |
| C L , C D | Coefficients of lift and drag, |
| C X , C Y , C Z | Coefficients of aerodynamic force |
| C l , C m , C n | Coefficients of aerodynamic moment |
Appendix B
RBFNN Training Parameters
| Parameter | Value | Definition |
| X | 03 | Number of inputs |
| Y | 03 | Number of outputs |
| N | 02 | Number of hidden layers |
| w jk | 0.01 | The initial value of the weight updating parameter of the first hidden layer |
| w ij | 0.01 | The initial value of the weight updating parameter of the second hidden layer |
| η jk | 0.99 | Learning rate from input to hidden layer |
| η ij | 0.99 | Learning rate from the hidden layer to the output layer |