
Abstract
The application and analysis of effective blood supply chain network under natural disaster imposed many critical challenges which addressed through an optimization of multiple objectives functions. In this article, relies on reference point algorithm, a user-preference based enriched swarm optimization algorithm is proposed where, inner reference points were produced depending on the perturbed reference point. For each inner reference point, weakly/ɛ-properly Pareto optimal solution was generated using augmented achievement function. All the generated solutions (points) are presented as potential positions for particles in the particle swarm optimization PSO. The proposed algorithm has been reinforced with a novel chaotic contraction operator to retain the feasibility of the particles. To prove the validity of our algorithm, the obtained results are compared with true Pareto optimal front and three of the most salient evolutionary algorithms using inverted generational distance metric IGD. In addition it was implement to detect the most cost and time efficient blood supply chain to provide the required blood types demand on the blood transfusion center in emergence situation, where, it is required to solve this real life application with predefined supply time and predefined supply cost, which is considered as reference point to get the nearby Pareto optimal solution. By the experimental outcomes, we proved that the proposed algorithm is capable to find the set of Paetro optimal solutions nearby the predefined reference points.
Introduction
This research investigates blood supply chain network under natural disaster, where various transportation means, with different speed, cost, efficiency, and capacity, are employed to carry the blood from blood collection centers to blood transfusion centers. Due to importance of humanitarian operations during and after natural disasters, many scientists aimed to develop mathematical applicable models that simulate the emergency situations [1]. One of the main challenges of any blood transfusion service is managing the blood supply chain problem robustly during and after natural disaster. Several researches have been investigated different mathematical models to investigate blood supply chain in emergency situations. Jabbarzadeh et al. [2] presented a novel mathematical formulation for blood supply chain under natural disaster. Fahimnia et al. [3] presented a stochastic multiobjective model for blood supply chain under disaster. Khalilpourazari [4] studied a mathematical model for multiple objective to design blood supply chain network under natural disasters, where they implement the concepts of multiobjective optimization in solving blood supply chain.
Multiobjective optimization (MO) is defined as the operation of optimizing more than two conflicting objectives under certain constraints, which may be suitable for several real-world applications [5]. In the context of finding the Pareto optimal solutions, the problem is converted to a compound one objective case as a weighted sum linear combination of different objectives. The paramount side of this weighted sum combination is that a set of effective solutions can be obtained via adjusting the weights. Unluckily, this needs several runs equal to the number of required effective solutions. Moreover, this technique cannot be employed to get Pareto-optimal solutions in cases that have a non-convex Pareto-optimal front [6]. Furthermore, there is no reasonable way for determining suitable weights and the so formed objective function may lose its value because of merging non-measurable objectives. To overcome this trouble, ɛ-constraint technique was developed [5]. This technique classifies the objectives as a preferred one and all others in another class such that the optimization is done for the first class, but the other class is considered as bounded constraints by certain permissible levels. Via altering these levels, the full Pareto-optimal set is generated. The time consuming and the ability of finding weakly non-dominated solutions are considered the most weaknesses of this method. Other researchers are also working on hybridization of the classical approaches [5]. The common drawback of all these methods is the separation of the DM’s preferences and the efficient solutions by allowing to firstly search the global solution for a set of Pareto-optimal solutions and then submit them to the DM. In addition, extra drawback may be that the DM has too many choices to select from [7].
The most satisfying outcomes can be created by presuming the classical interactive techniques [8, 9]. Only, portion of the Pareto optimal solutions are produced, and the DM can specify and correct his priorities and choices during the continues solution operation and his knowledge about the problem and its capabilities better is continuously updated. Furthermore, Since the DM is engaged in the solution operation, he can be had more confidence in the end solution decision [7]. Suggesting a reference points or a reference direction from the DMs is needed by the reference point-based approaches [10] which outcome in an outshined group of solutions on the front of Pareto-optimal solution. Based on these reference point-based approaches, one can form and find a single solution of a single objective optimization case. It is not a good idea to give a single solution because it is poor of information about the properties of the solutions in the required area of the Pareto frontier. In addition, it is subjective because its solution depends on the selected weight vector. Furthermore, it does not give any information about the sensitivity of the solution with respect to the change in the selected weight vector because the single final solution is particular to the selected weight vector and does not give any information about the effect of slight changes of the weight vector on the solution. One must again form another achievement scalarizing problem in order to locate another solution for different weight vector [11]. Further, regardless several modifications, only one reference point is needed for the reference point technique per each time. However, several reference points may be used simultaneously by the DM to explore the preferred Pareto-optimality regions [12].
Handling several objectives simultaneously as competing objectives rather than simplifying the multi-objectives problem to a one objective problem is one of the recent trends [13–15]. In recent years, big growth has been achieved in the usage and development of the heuristic-based optimization methods [16–20]. It is more likely to locate the global solution of certain problem because they utilize a group of solutions in the search process. Also, there is no need to any derivative information because it utilizes only a straightforward scalar criterion. In a single execution run, the evolutionary algorithms (EAs) have an ability to detect the whole Pareto front of an MOP and this is because they have a population-based nature. Since Schaffer’s seminal work [21], utilizing EAs to execute the MOPs problems has been taken a great interest. The genetic algorithms (GA) is the best-known branch of the existing EAs. GA is a procedure of stochastic search setup on the natural selection mechanism, genetics and evolution [22]. For long time, several researchers have studied the area of MO utilizing EAs. As recorded in [23], the first implementation of the multi-objective GA was named as: “the vector evaluated genetic algorithm (VEGA)”. Since that time, several EAs have been produced for analyzing MOPs [24]. GAs are a very efficient method for rapidly finding a feasible solution to a compound case. Although they aren’t close or even instantaneous, they are excellent in dealing with a complex large search space. Particle swarm optimization (PSO) technique is considered as an important heuristic-based optimization method and was utilized in several optimization problems. Although GA and PSO belong to the same type of optimization techniques and they have many inherent parallel features, but they have their particular features when solving distinct optimization cases [25–27]. Comparing PSO with GA, it is found that PSO has several features [28, 29]. Because PSO has memory and GA hasn’t. In PSO, the information about the good solutions are memorized by all the used particles; whilst in GA, past information of the solutions is lost in the progress of the process if the population varies. The construction of the PSO lead to a constructive collaboration among the particles; which means that the particles of the swarm participate their knowledge between themselves. To recent days, in practice, PSO has been utilized successfully for optimizing different continuous complex nonlinear problems [30].
Recently, there are many efforts concentrated on the mixing of PSO with various heuristic optimization methods. The authors of [31] have suggested PSACO (particle swarm ant colony optimization) method suitable for the quite non-convex optimization cases. Likewise, In [32], a hybrid adaptive neural network–particle Swarm Optimization (ANN–PSO) algorithm was being suggested for harmonic separation. The authors of [33] have designed a multi-objective PSO in order to deal with multi-objective hybrid-model line sequencing problems. In [34], they classify all the particles and determine the global best particle. In [35], three mixed PSO algorithms were suggested. As declared in [36], the suitability task is relied on the fitness of the strength Pareto evolutionary algorithm 2 (SPEA2). In [37], A multiple swam algorithm was suggested. In order to preserve the so far found non-dominated solutions, the authors of [38] have utilized an outer archive. Fuzzy clustering-based PSO has been produced in [39]. A multi-objective comprehensive learning particle swarm optimizer has been suggested in [40]. A two-local-best (lbest)-based multi-objective PSO (2LB-MOPSO) method has been suggested in [41]. Using PSO in MOEA/D structure can be found in [42]. The responsibility of each particle is to solve a unique sub-problem. For a complete survey of MOPSO, the reader can refer to [13]. All these heuristic methods suffer from time consuming, also suffer from a common drawback of allowing to the search to scan the solution space for detecting a set of Pareto optimal solutions and then present them to the DM. Further, there are another drawback which is the large number of solutions to select from them by the DM [44].
Fonseca, Fleming [45] and Tanino et al. [46], have made the precocious attempts on MOEAs based on the DM’s preference. The Pareto dominance and the preference information are used to determine the rank of the members of the population in these algorithms. Greenwood et al., [47] have used rate functions for the population ranking, and preference information has also used in the permanence criterion. Sakawa and Kato [48] proposed an interactive fuzzy technique, where the preference was presented in the shape of reference points. A comparison of a pair of individuals in terms of their convenience values depending on the DM’s preferences at each iteration have been made by Phelps and Köksalan in [49]. By changing the meaning of dominance, combining the preference information with NSGA-II have been made by Branke and Deb in [50]. Further consideration of using reference points to detect preference information has been made in [51]. Deb et al. [52] proposed an interactive MOEA relied on reference tendencies.
An interactive decision making support system has been suggested by Deb and Chaudhuri in [53]. In [54], Li and Silva have improved a new version of an MOEA/D coupled with a simulated annealing. In [55], Sanchis et al. have suggested an MOEA combined with a priori preferences, that have been created via utilizing the known physical programming principle. An interactive evolutionary multiple objective optimization approah based on progressively approximated value functions has been proposed by Deb et al [56]. Rachmawati and Srinivasan, in [57], have suggested a priority-based MOEA to detect the knee area in the Pareto front. In [58], Thiele et al. have used the DM’s priorities presented in the form of reference points interactively.
In this research, a MO algorithm that combines the user priority with EAs is proposed for providing a mechanism that would allow the DM to be a partner in the solution procedure. The DM is considered to have a big experience about the problem. Unfortunately, it’s not true, some of the members are not reliable DMs and they have a fuzzy view of the problem, which lead to unreliable decision, in order to overcome this drawback, the set of inner reference points were generated, for each inner reference point a weak Pareto optimal solution was generated using augmented achievement scalarizing function, all these solution are set as the initial position for a particle in the PSO. Further, PSO has been reinforced with a novel chaotic contraction operator to retain the feasibility of particles. The proposed approach was implemented to various types of MO benchmark functions given for CEC’09, and an application of blood supply chain, which is considered multiobjective optimization problem. In this application, we need to find the nearby Pareto optimal solution using a predefined supply time and a predefined supply cost.
We organize this article as following. Some preliminaries in multi-objective optimization are explained in section 2. In section 3, Reference Point interactive approaches are presented. A description of reference point based enriched particle swarm optimization is given in Section 4. Numerical computation is described in section 5. Finally, section 6 concludes the work.
Preliminaries of multi-objective optimization
General minimization problem of M objectives can be defined as:
given
The reference point technique was suggested by Wierzbicki in [59], in which the objective is to obtain weakly, ɛ-properly Pareto-optimal solution, that is nearest to a chosen reference point of objective level relied on solving an achievement (scalarizing) problem. Given a reference point z* for an M-objective optimization problem of minimizing f1 (x) , f2 (x) , . . . , f
M
(x) with x ∈ S, the next SOP is considered for this objective:
Here, w
i
represents the i-th component of a selected weight vector utilized for scalarizing the objectives where it satisfies that
In the reference point method discussed above, different solution can be obtained by altering the weighting coefficient w
i
, it is found that the solution relying on the selected weight vector which means that it is subjective. Furthermore, the unique selected solution is appointed to the selected weight vector. In order to get a solution for different weight vector, another new scalarizing (achievement) problem should be formulated once more. In [59], Wierzbicki has suggested a method by which the got solution z′ is utilized to generate M new reference points, which help the procedure algorithm to be interactive and valuable in practice, as shown in the following formula:
Where e j is the j-th coordinate direction vector. (e.g., as declared in Fig. 1, where two new reference points (Z A and Z B ) are depicted for two-objective problem).
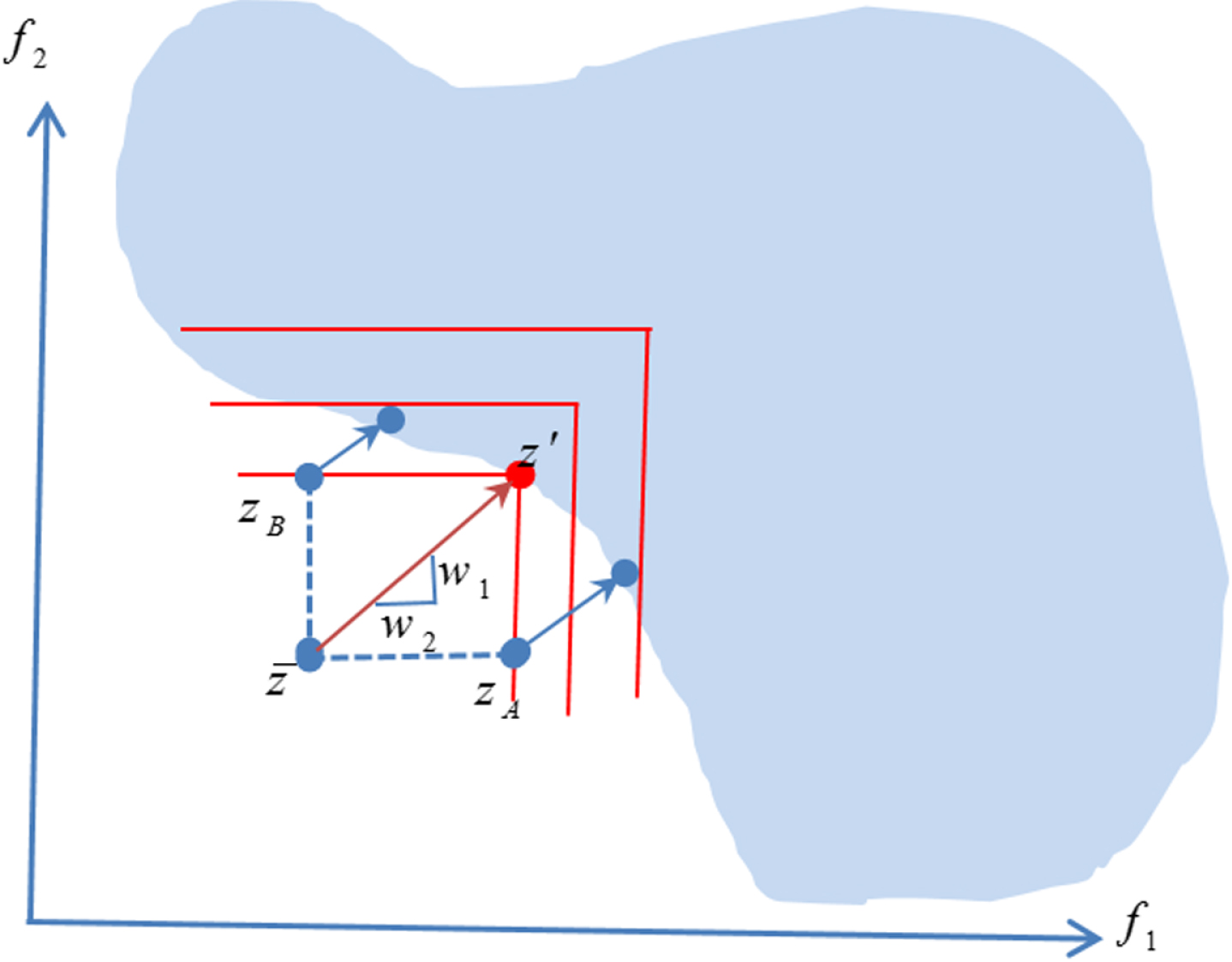
The technique of classical reference point.
By formulating a new scalarizing (achievement) problems, Pareto optimal solutions are then got. The previous steps are repeated with new suggested reference points if the DM is not agreed about any of the current Pareto-optimal selected solutions. One of the drawbacks of this algorithm is that, the DM is asked to determine a reference values and a weight vector simultaneously.
In this section, a reference point based enriched swarm optimization RP-EPSO approach is described. Earlier in Section 1, we mentioned that one of our aims is to design a novel algorithm in which a better rescaling is to be done when some of the members are not reliable DMs. Subsequently, utilizing an achievement function, a multi-objective problem is converted to a one-objective problem. However, unlike classical reference point methods, wherever to cover all Pareto-optimal front, a group of weight vectors is created, a smaller set of basis reference points are created, consequently generating set of inner reference points, just to obtain a number of solutions near to inner reference provided by the user. Our novel proposed technique has the following main steps:
Step0: Individually, Minimize and maximize the objective functions so as to determine the range of each objective for Pareto-optimality, and this information must be given to the DM. Where there are features of knowing the range of each objective for Pareto optimal solutions and the shape of the Pareto-frontier itself in a problem for an adequate decision-making to choose a single preferred reference point.
Step1: DM must identify preferred reference point
Step3: Construct achievement function as follows:
The obtained solution is x h is weakly, ɛ-properly or Pareto optimal solution for the corresponding Z h .
Step4: Set of inner reference points was generated to guarantee that the DM take the correct and reliable decision in right time as follows:
Calculate perturbed M basis reference points
where
Using the perturbed M basis reference points
Figure 2 exemplifies the two-objective problem (m = 2), two such new basis reference points (Z A and Z B ) are also illustrated.

Possible sampling region for inner reference point method for the two-objective problem.
When decision making is emphasized, the objective of solving a MOP is referred to supporting (helping) a DM in finding the most preferred Pareto optimal solution according to his subjective preferences. The DM suggest preferred reference point (feasible/ infeasible).
Step 5: For each point from the set of inner reference points, optimal solution was generated using achievement functions. The solution of achievement scalarizing functions (eq.6) is weakly Pareto optimal solution of the multiobjective problem if all the coefficients are positive.
Also, it has an optimal Pareto solution if it has a unique solution, which has been proven in [5]. In order to overcome this drawback, enriched PSO is implemented. The initial position for the particles in PSO is assigned at the position of the generated solutions using achievement functions.
Step 6: Initialize a population of particles with the generated solution from using achievement functions on n-dimensions in the problem space.
Step 7: Evaluate the required optimization fitness function in n variables for each particle.
Step 8: Set P best of each particle and its objective value equal to its current position and objective value and set G best and its objective value equal to the position and objective value of the best initial particle.
Step 9: Update the velocity and position of each particle according to PSO equations as follows.
Step 10: To enrich the searching behaviour and to avoid being trapped into infeasible region, chaotic dynamics(chaotic constriction factor χ) is incorporated into the PSO: To restrict velocity and control it during evolution of particles, some authors [26, 60–62] use a constant/dynamic constriction factor χ, which has a constant value to improve the performance of PSO. To accelerate the convergence property of the proposed optimization tool and to keep the feasibility of the particles, chaotic constriction factor is implemented. A well-known logistic equation is employed, where it exhibits chaotic dynamics
New position
Pseudo code of chaotic constriction factor is declared in Algorithm 1.
Step 11: Evaluate the desired optimization fitness function in n variables for each particle.
Step 12: For each particle, compare its current objective value with the objective value of its Pbest. If the current value is better, then update Pbest and its objective value with the current position and objective value. Determine the best particle of the current swarm with the best objective value. If the objective value is better than the objective value of Gbest, then update Gbest and its objective value with the position and objective value of the current best particle.
The proposed algorithm is applied to the set of benchmark functions provided for the CEC09 “special session and competition” [63]. Also, the proposed algorithm was implemented to solve blood supply chain network under natural disaster. A disaster can result in a sudden increase in blood demand, therefore, solving blood supply chain application in an emergency situation is of vital importance. All the tests have been executed on an Intel core 2 Duo 2.6 GHz processor. The algorithm is coded using MATLAB. The parameters adopted in the numerical simulation are listed in Table 1.
The parameters setting
The parameters setting
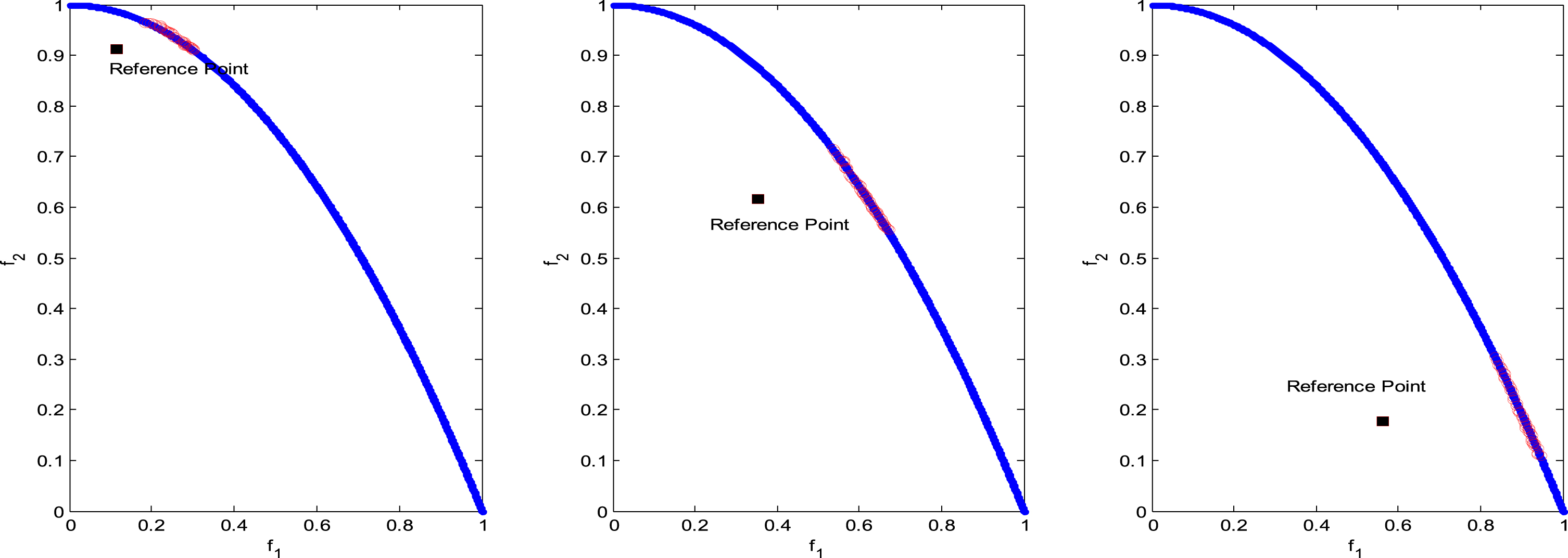
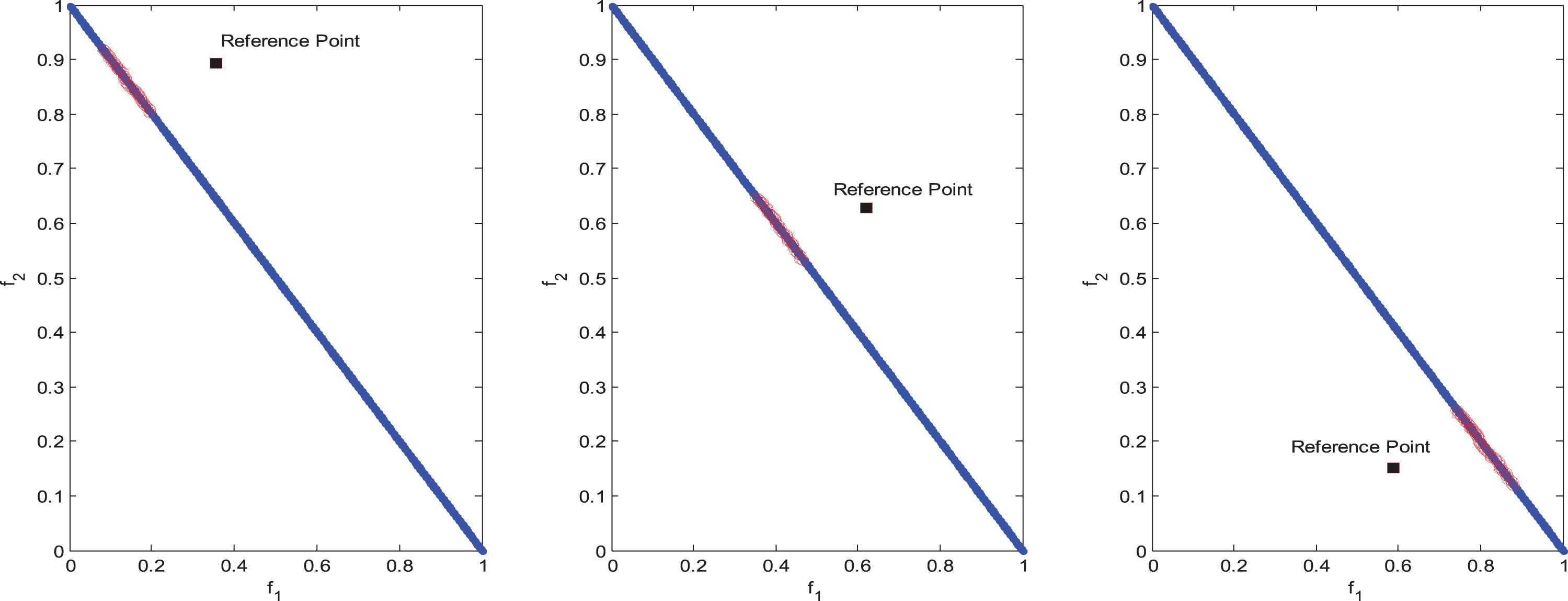
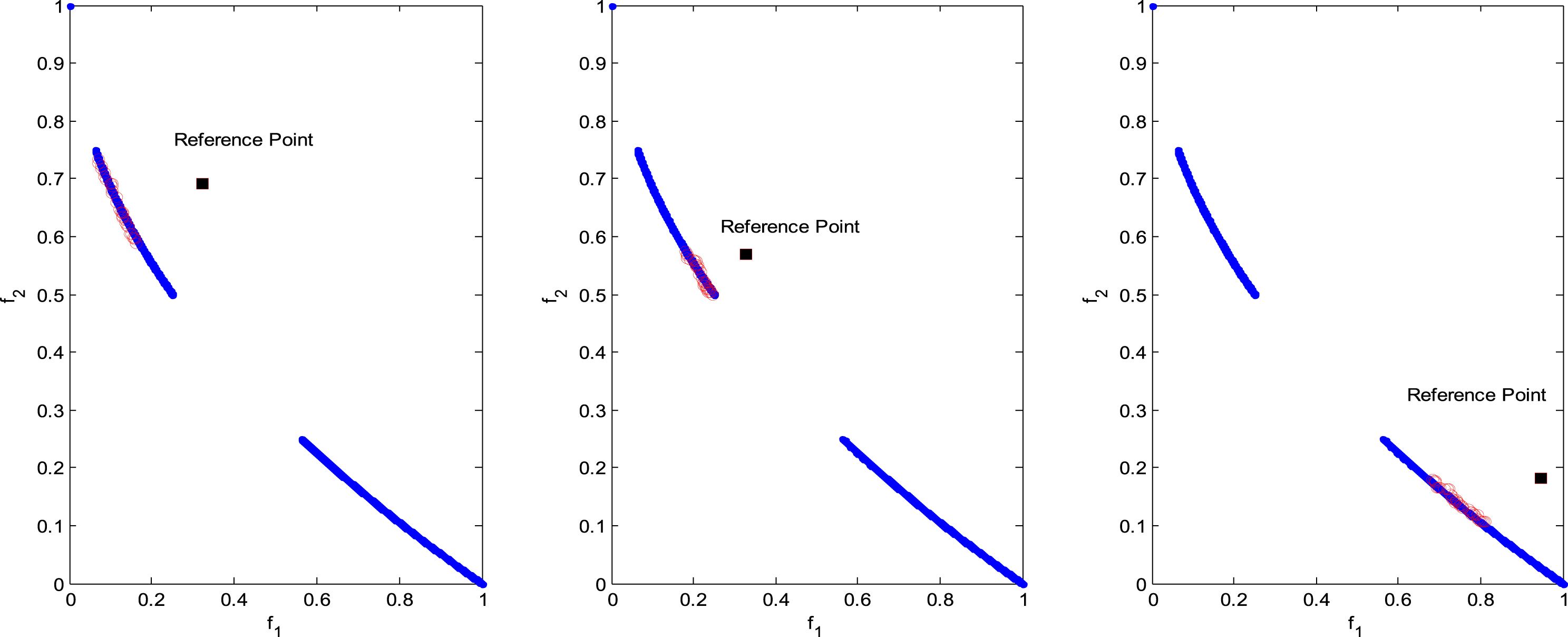
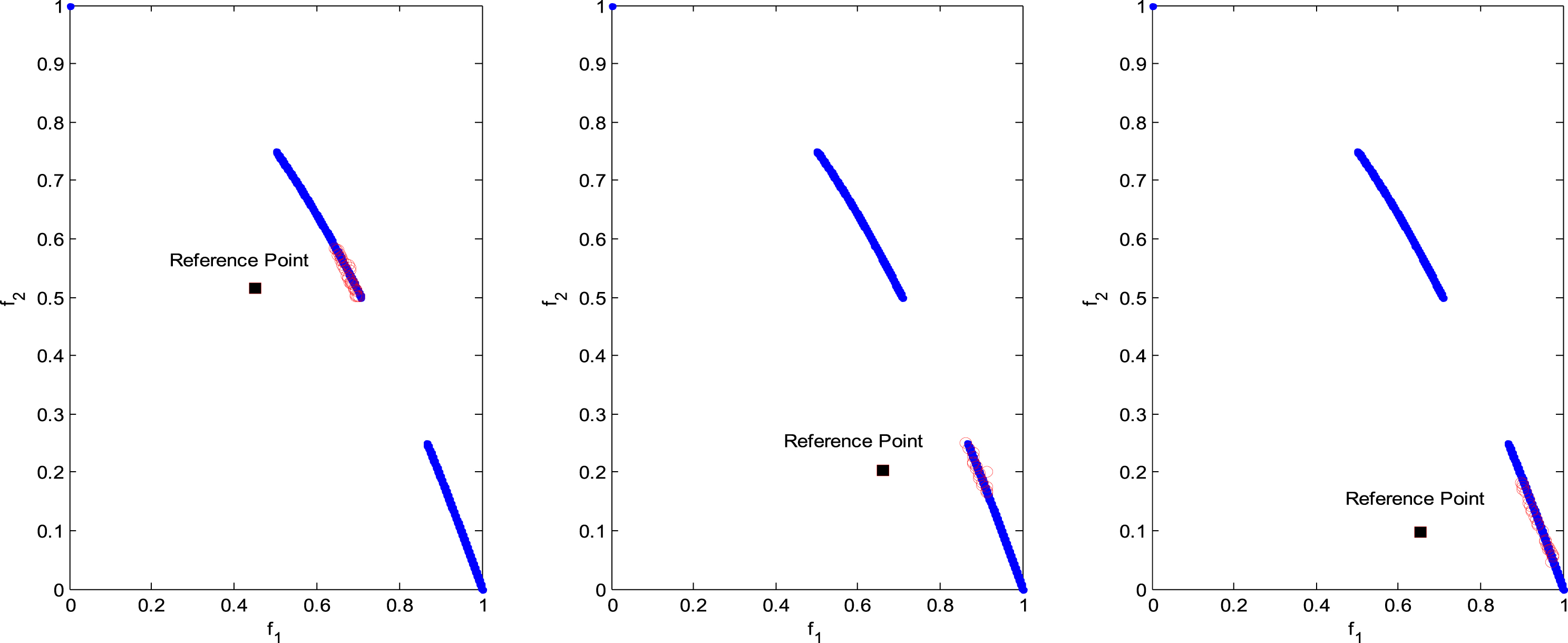
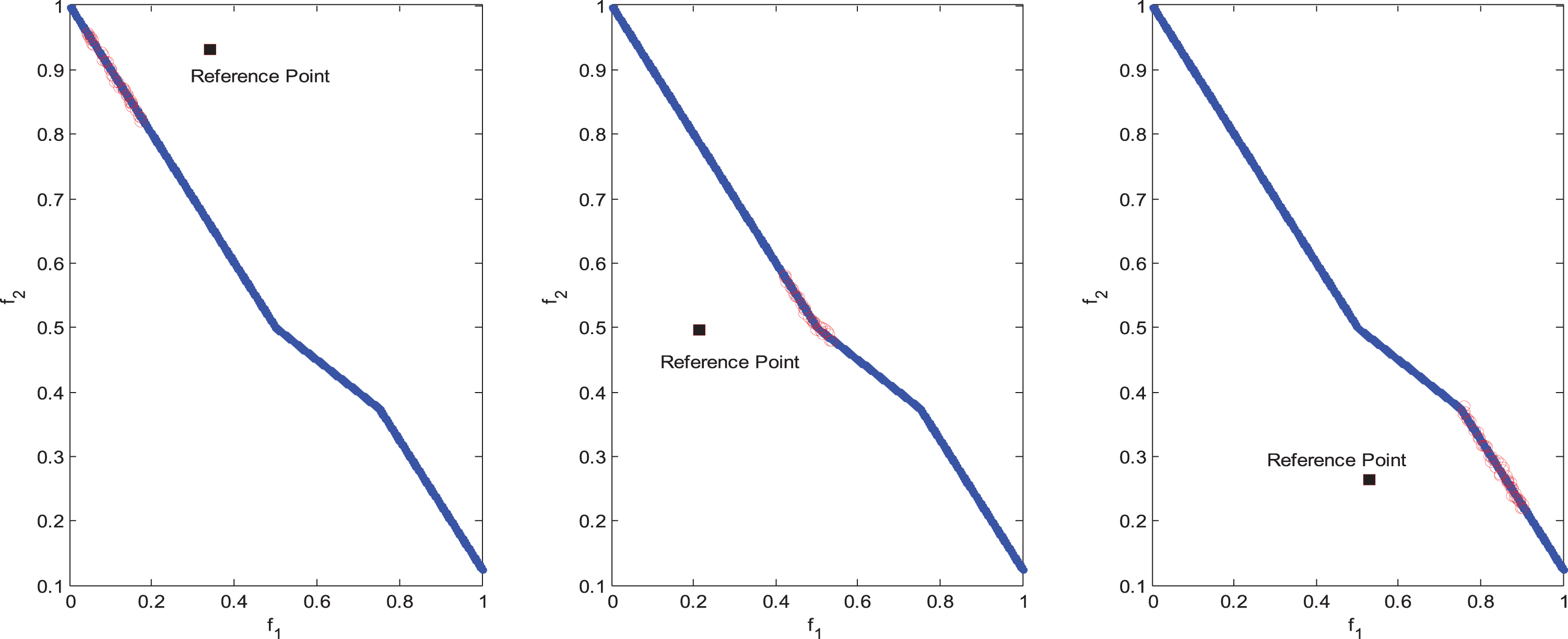
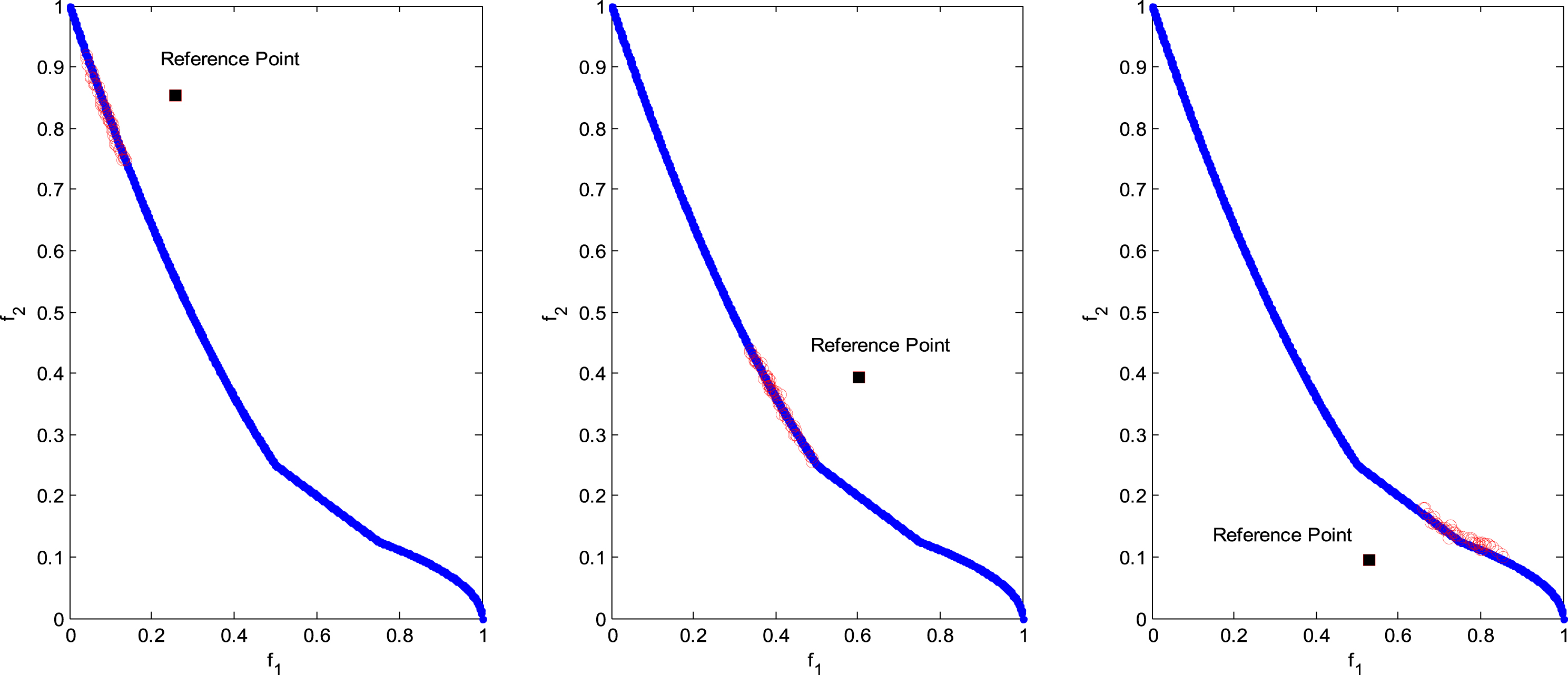
Problems UF2, UF3, UF4, UF7 are unconstraint optimization problems, while problem CF2, CF3, CF4, CF5, CF6, CF7are constrained optimization problem. For each problem, three reference points was suggested, and the corresponding attainable Pareto optimal set are depicted, along with visualization of the true Pareto optimal solution. Figures 3–12 shows the attainable Pareto optimal set corresponding to each reference point, with the true Pareto optimal solution.

Preferred Pareto region for three reference points on UF2.

Preferred Pareto region for three reference points on UF3.
Preferred Pareto region for three reference points on UF4.
Preferred Pareto region for three reference points on UF7.
Preferred Pareto region for three reference points on CF2.
Preferred Pareto region for three reference points on CF3.
Preferred Pareto region for three reference points on CF4.

Preferred Pareto region for three reference points on CF5.
Preferred Pareto region for three reference points on CF6.

Preferred Pareto region for three reference points on CF7.
It can be shown, that the proposed approach has satisfactory diversity and distribution characteristics for these test problems with different characteristics. The superiority of the proposed approach is more pronounced in all test problems as the proposed approach captures the nearby true Pareto optimal front in the entire test problems. It is interesting to note that for each reference point, preferred region of the Pareto optimal sets was generated for MOPs. This indicates the ability of the proposed procedure in solving MOPs for two objective functions and for three objective functions as well. Such procedure will provide the DM with a set of Pareto solutions near her/his preference, which allows a DM to concentrate only to those regions on the Pareto optimal frontier which are of interest to her/him.
Convergence is one of the most objectives for any MOP. In order to record convergence, the inverted generational distance metric (IGD) was used. This measure of convergence pointed to how far the true Pareto-optimal front from the obtained front is. Obtained front A is better than obtained front B in terms of convergence if the value of IGD metric for front A is less than the value of IGD metric for front B. For a detailed explanation, see [63–65].
Performance Metric (IGD): Let P* be a set of uniformly distributed points along the true PF (in the objective space). Let the size of this set is H. Let A be an approximate set to the true PF. The minimum Euclidian distance of each point in the set P* from the obtained solution set A is computed. Let this distance be l
i
for the ith element of the Pareto-optimal set P*. Then the IGD metric is given by:
In our proposed approach, we get a partial set A p corresponding to the preferred reference point. The performance indicator used to quantify the quality of the obtained results is the modified IGD.
Let A
p
be an approximate partial set to the true PF corresponding to the preferred reference point. Let
Where x
l
∈ P* is the Closest Point in true PF to the attainable lower bound, x
u
∈ P* is Closest Point in true PF to the attainable upper bound. Figure 13 shows the modified IGD.
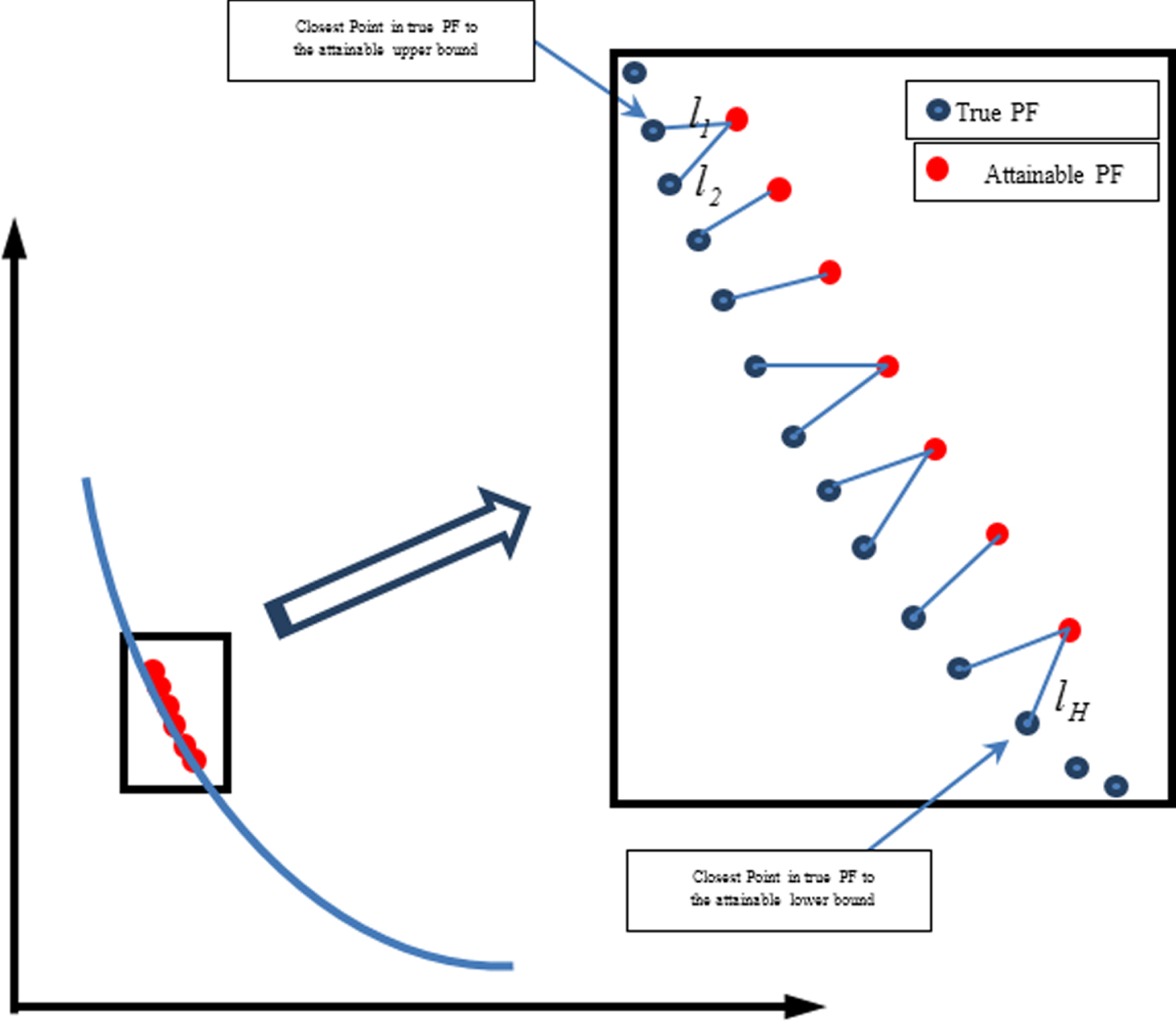
Modified IGD metric for partial attainable set.
In order to make the viability of our algorithm, we compare the results obtained by running our algorithms with true Pareto optimal front [63] and three of the most recent evolutionary algorithms [66, 67, 69] using IGD. Table 2 summarizes the quality of solutions obtained by the proposed algorithm, with the extreme points of the obtained approximate PF. Also, it shows the comparison between the proposed approach and three of the most recent evolutionary algorithms using IGD performance metric.
Statistical analysis of the Partial Pareto set of problems (UF2, UF3, Uf4, UF7)
The test benchmark functions from CEC09 special session is used for evaluating the performance of our proposed new algorithm. In Table 2. All test problems’ IGD values are recorded. The Less values of IGD criteria prove and show that the got front is very close to the true predetermined Pareto optimal front. The performances of our proposed algorithm are very well in most of the test cases. The global convergence is achieved, and the priority area of the Pareto optimal limit is determined, and this is recorded and presented in Table 3.
Statistical analysis of the Partial Pareto set for problem (CF2, CF3, CF4, CF5, CF6, CF7)
The mathematical model proposed by [4] aim to answer the optimal decisions related to the location of permanent and mobile blood collection centers, allocation of donor groups to the blood collection centers, the number of located temporary and permanent blood collection facilities, blood inventory level at each blood center and the optimal number of required vehicles and helicopters in each blood collection facility to transfer collected blood to blood transfusion. They considered two objective functions which aims to minimize the total blood supply chain costs as well as total transportation time. The mathematical formulation has the following form [4]:
The first objective function
The second objective function
The nearby Pareto optimal solutions Corresponding to different reference points
The nearby Pareto optimal solutions Corresponding to different reference points

Nearby Pareto optimal corresponding to reference point “ Z1 = 570000, Z2 = 130”.
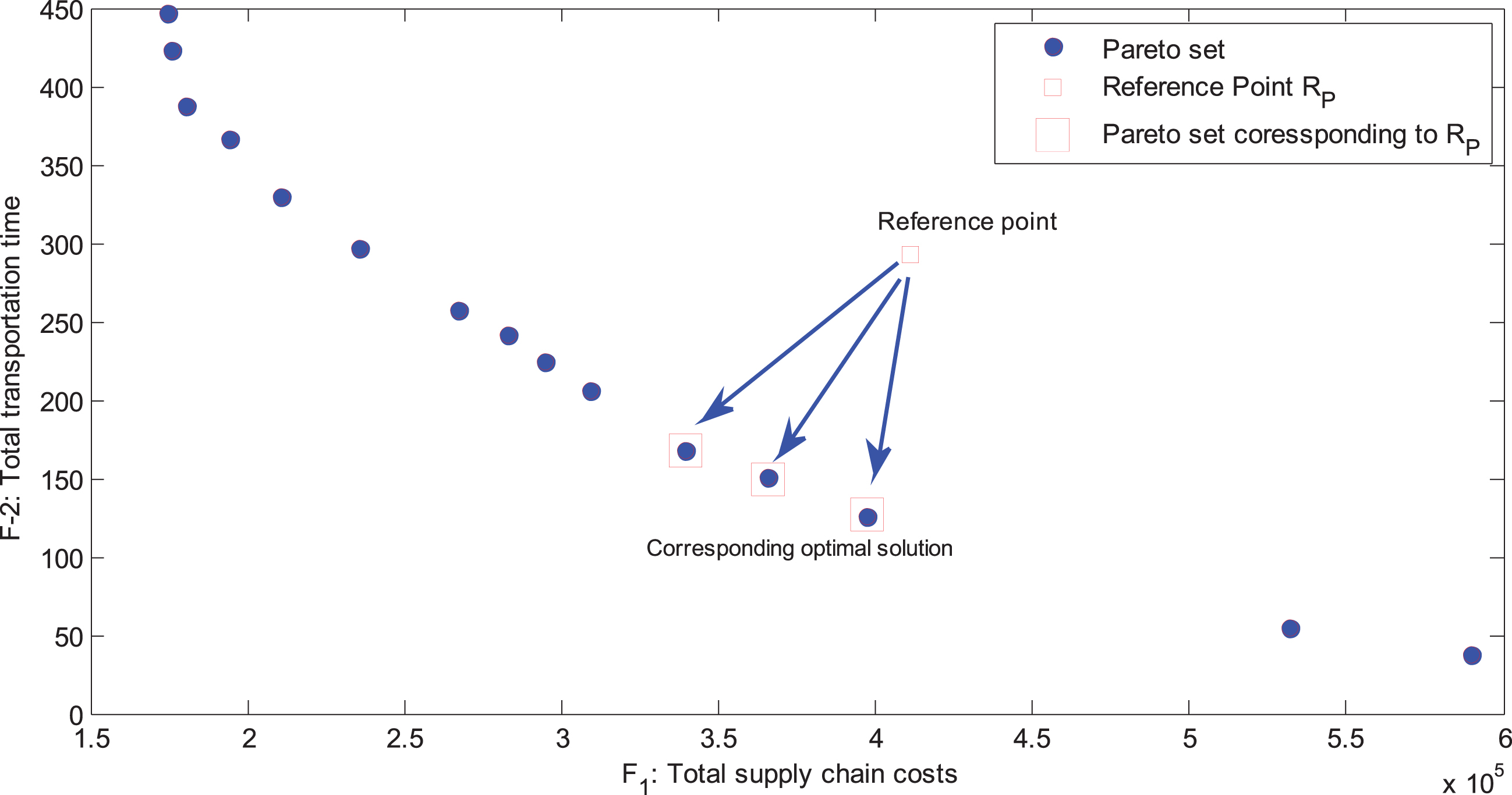
Nearby Pareto optimal corresponding to reference point “ Z1 = 411130, Z2 = 290”.

Nearby Pareto optimal corresponding to reference point “ Z1 = 329000, Z2 = 350”.
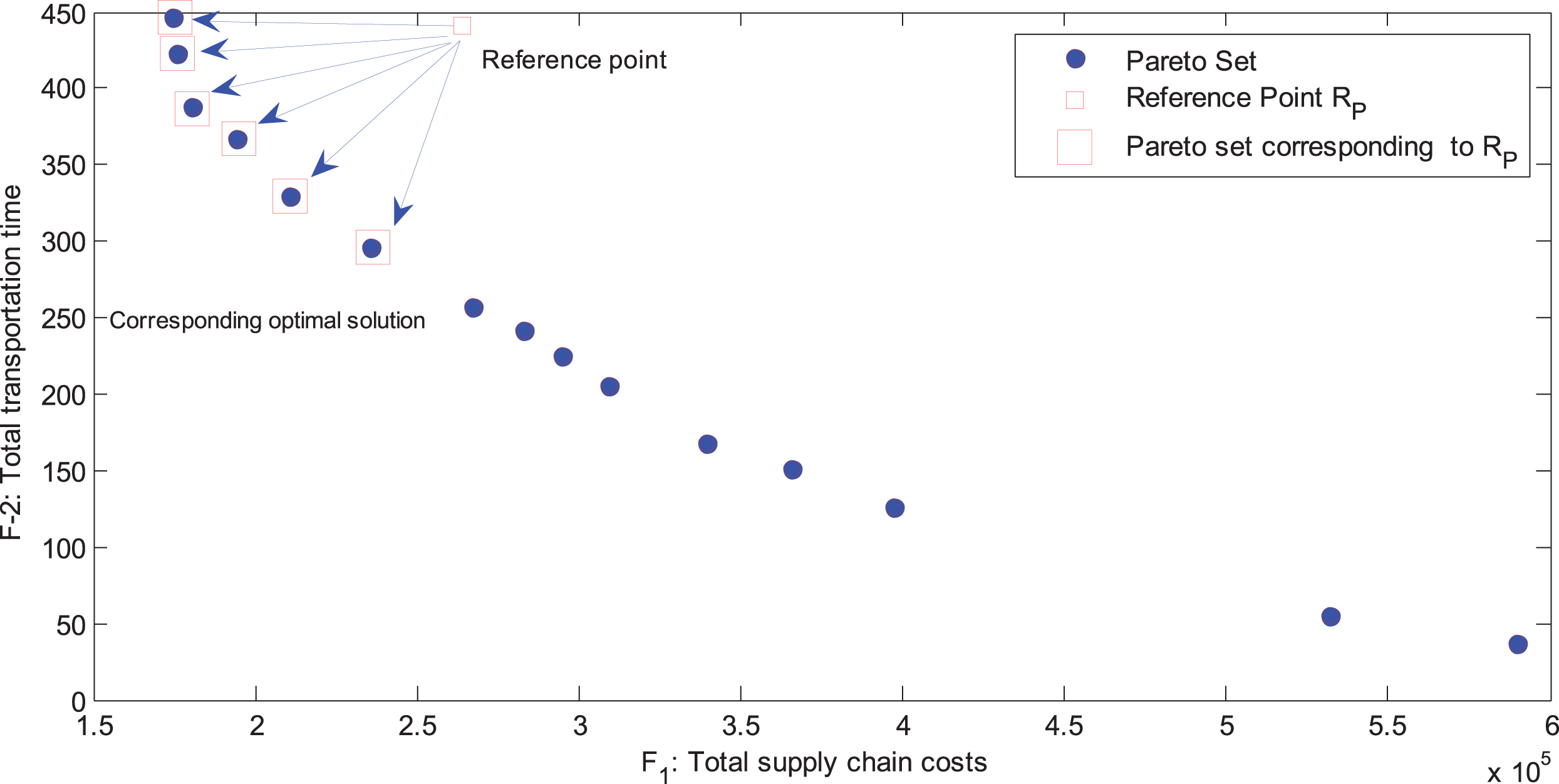
Nearby Pareto optimal corresponding to reference point “ Z1 = 26390, Z2 = 440”.
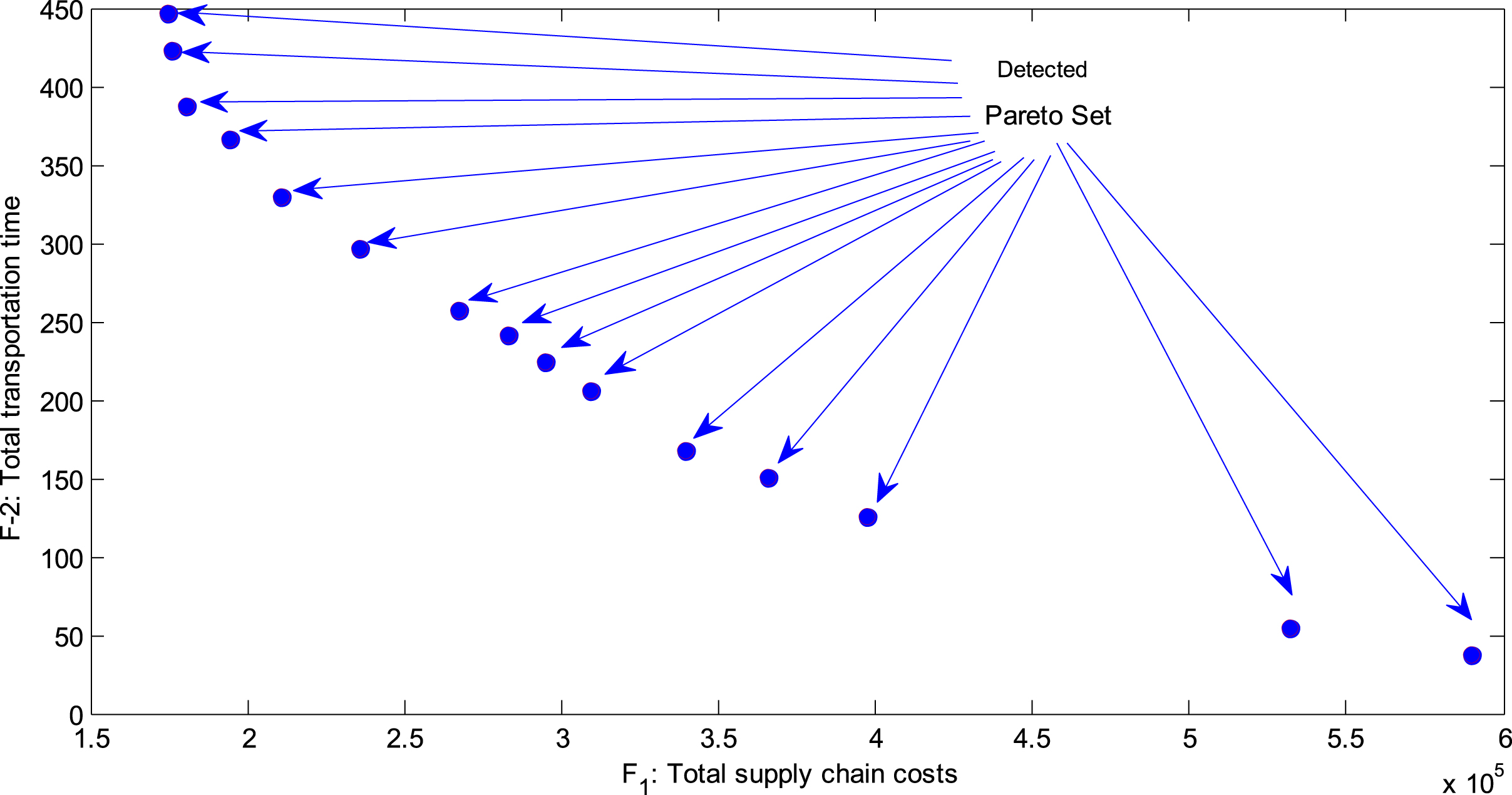
The detecting set of Pareto optimal solutions.
The proposed algorithm has this behavior because the swarm optimization concept qualifies the proposed algorithm to inspect the less crowded regions in the priority domain. Hence the good performance of the suggested technique is due to the effective combination of swarm optimization and chaotic constriction factor. Inclusively, the performance of the suggested approach is good on the test cases used for this research. The effect of adding the chaotic constriction factor is to make the searching process fast and helps the objective functions to have a fine-grained value. Also, determining a reference values makes the algorithm steps to concentrate on an assured area inside the borders of the Pareto-optimal. On the other hand, determining a reference point will make the computation process more effective via searching the preferred regions determined by the DM. Also, determining a reference point will decrease the time taken for convergence to the Pareto-optimal front in addition to improve its scalability to cover higher objective spaces.
The main advantage of the classical optimization methods is that it guarantees to find the true global optimal solution, unlike metaheuristic methods, where the resulting solution can be trapped in local optimal. But they have limitations with real, large-scale systems, nonconvex, nondifferentiable, non-formulated problems, and ill-defined problems. Heuristic methods are usually very efficient in finding near-optimal solutions especially with complex problems. In this section, we discuss some limitations of the proposed algorithm.
There are some limitations of the proposed algorithm. The proposed algorithm randomly generates the of position for particles. The quality of the particles is unlikely to be high due to the random selection process. Many evolutionary algorithms suffer from degeneracy. The degeneracy mainly occurs when multiple particles represent the same position, which may lead to an inefficient solution. To date, theoretical convergence analysis of evolutionary algorithms is still at an early stage and has been experimentally studied in literature, making mathematical convergence analysis an important subject in a future study, finally the advantages and disadvantages of the proposed algorithm can summarized in Table 5.
Comparison of Advantages and Disadvantages
Comparison of Advantages and Disadvantages
In this work, a significant idea has been addressed via integrating one of the modern heuristic algorithms (PSO) with a traditional reference point method which help not to get a one optimal solutions but to get a group of solutions close to the required interest area for the DM, in addition the proposed approach was applied solve blood supply chain under natural disasters. Our approach has been developed in such a way that incorporate the DM in the procedure steps and not to leave him alone till the end step just to select a single solution from the whole Pareto optimal group. The position of the selected the reference point helps to make the algorithm concentrate on a specific area in the Pareto-optimal frontier. The major advantages of the proposed approach could be summarized as follows: The prime point of this work is utilization of the steps of the reference point based PSO in order to get several solutions in the DM areas of interest and not on the whole Pareto-optimal front. The proposed approach enables the optimization process to do higher-level search of the area of his interest on the Pareto-optimal front. Determining a reference point will make the computation process more effective via searching the preferred regions determined by the DM. Also, decreasing the time consumed for convergence to the Pareto-optima. The reference point may belong or may not belong to the feasible set of points. The proposed method provide the DM with a set of solutions close to his interest so that a more reliable solution can be chosen. Chaotic constriction factor decreases the convergence time of the proposed algorithm. Ability to solve real word application, by assign initial preference point and get the nearby Pareto optimal set to the reference point.
Combining swarm optimization with reference point approaches opens the gate for more effective optimization system of multi-objective real applications. For further work, we plan to utilize the suggested technique on more complex real-world cases. In addition, conduct research on the parallel mechanism of multi-reference point approaches and multi-criteria decision set problems so that it enhances the competence and efficiency of such methods that are very related for real-world problems.
Footnotes
Acknowledgments
The authors extend their appreciation the great support of Deanship of Scientific Research, in Taif University for funding Taif University Researcher Supporting Project Number (Tursp-2020/48), Taif University, Taif, Saudi Arabia.