
Abstract
The artificial bee colony (ABC) algorithm is one of the classical bioinspired swarm-based intelligence algorithms that has strong search ability, because of its special search mechanism, but its development ability is slightly insufficient and its convergence speed is slow. In view of its weak development ability and slow convergence speed, this paper proposes the QABC algorithm in which a new search equation is based on the idea of quasi-affine transformation, which greatly improves the cooperative ability between particles and enhances its exploitability. During the process of location updating, the convergence speed is accelerated by updating multiple dimensions instead of one dimension. Finally, in the overall search framework, a collaborative search matrix is introduced to update the position of particles. The collaborative search matrix is transformed from the lower triangular matrix, which not only ensures the randomness of the search, but also ensures its balance and integrity. To evaluate the performance of the QABC algorithm, CEC2013 test set and CEC2014 test set are used in the experiment. After comparing with the conventional ABC algorithm and some famous ABC variants, QABC algorithm is proved to be superior in efficiency, development ability, and robustness.
Keywords
Introduction
The popularity of swarm intelligence has risen in recent years, and intelligent algorithms inspired by biology have endlessly emerged. The swarm intelligence algorithm is simple and easy to implement, making it get great for development in engineering applications. It has gradually become the basis of modern applications in many fields.
The swarm intelligent algorithm can solve numerical optimization problems quite well, and more and more swarm intelligent algorithms have been proposed, such as the more classic swarm intelligence algorithms like particle swarm optimization (PSO) [1], differential evolution algorithm (DE) [2], etc. The basic concept of PSO is to determine the optimal solution by collaboration and information sharing among individuals in a group. DE is designed to simulate crossover, mutation, and selection in genetics [3]. According to the rule of survival of the fittest, the optimal solution within the search range can be found through multiple iterations. A large number of bioinspired swarm intelligence algorithms has emerged, such as bat algorithm (BA) [4], artificial fish swarm (AFS) algorithm [5], flower pollination algorithm (FPA) [6], firefly algorithm (FFA) [7], artificial bee colony (ABC) algorithm [8], etc. These algorithms have few parameters and are easy to control.
Artificial bee colony (ABC) algorithm was first proposed by Karaboga in 2005. ABC is inspired on the basis of observing real bee behaviors that looking for sweet liquid produced by flowers and sharing food source information with bees in the hive. It is an optimization algorithm proposed by imitating the behavior of bees and is a specific application of the idea of swarm intelligence. It is used to solve different numerical optimization problems [9–13] and can also be applied in different engineering fields [14–19]. However, ABC is similar to other bioinspired intelligent algorithms, having strong search ability, but weak development ability. In the process of searching, it is easy to increase the computational complexity, thus prolonging the search time and slowing down the convergence speed. In order to solve the weak development ability and low convergence speed of the ABC algorithm, this paper proposes a new artificial bee colony algorithm, called QABC. In addition to the conventional ABC algorithm, QABC is also inspired by the global optimization algorithm QUATRE [20]. QUATRE has excellent particle synergy. Combining this feature with the original ABC framework can enhance its development ability and reduce time complexity. In order to test the validity of QABC, two benchmark suites including CEC2013 and CEC2014 are used.
The remaining sections are arranged as follows. Section 2 introduces the framework and principle of the original ABC, as well as some known variants. The principle and algorithm of the proposed QABC are given in Section 3. Experimental results with analysis and comparison are presented in Section 4, after which the conclusion is drawn in Section 5.
Background review and related work
In this chapter, we will review the classical artificial bee colony algorithm and some of its famous variants.
Classical artificial bee colony algorithm
There are three types of bee colonies in ABC: employment bee, observation bee, and reconnaissance bee. In order to find the optimal honey source (equivalent to the feasible solution of the optimization problem), all bees undertake different tasks. The employment bees collect honey from the corresponding honey source and search for a better honey source in the neighborhood. After searching, the hired bees return to the hive to share their honey source information by dancing. According to the different honey source information, the observation bee chooses one of the employed bees to follow and collect honey and searches for a better honey source in the neighborhood of the honey source. When the honeybee or the observation bee cannot find a better honey source by searching the corresponding honey source neighborhood for many times, the employment bee turns into a reconnaissance bee, and searches for new honey source randomly in the searchable range and updates the honey source location.
In the initialization phase, the ABC algorithm randomly generates the positions of S N populations (corresponding to SN honey sources), and each location is generated within a specified range:
At the beginning of the search, the honeybee searches for a new honey source. Specifically, new candidate positions are generated from the vicinity of the current location as follows:
According to the honey source quality information shared by the employed bees, the observation bees choose the hired bees with better quality honey sources to follow. In other words, the higher quality honey sources are easier to observe and choose. The probability of choosing to follow is calculated as follows:
According to the calculated probability, the observation bee chooses the employed bees to follow by roulette. When the function value of the new honey source is better, the new honey source will replace the original honey source; otherwise, the original honey source will be retained. In the search process, if the honey source reaches the threshold after t iterations and no better honey source is found, then the honey source will be abandoned, and the corresponding employment bee will become a reconnaissance bee. According to Equation (1), the reconnaissance bee moves randomly in the search space to produce a new honey source instead of the original honey source.
Comparing with other optimization algorithms, the ABC algorithm performs extremely strong search ability, and so it has always been a research hotspot. In past years, a number of different variants of ABC have been proposed. In next paragraph, a succinct overview of the variants of ABC proposed in recent years is presented as follows.
In the case of a multimodal function, ABC is easy to fall into the local optimal solution prematurely. Therefore, chaos search ABC (CABC) [21] is proposed to solve the premature convergence problem. The observation bee in CABC exists in the form of a chaotic sequence, and the positions of the observation bee and honey source are matched by a chaotic sequence, which can enhance the local search, but make it difficult to fall into a local optimal solution. In addition, the elite selection ABC algorithm is proposed in [22]. The strategy of the algorithm is to improve the performance of the algorithm and prevent premature convergence by enhancing the solution ability within the specified search range. Aiming at the problem that the search speed of the classical ABC algorithm is too slow, a parallel ABC algorithm [23] was proposed to improve computational power. The algorithm allocates different proportions of computing tasks to nodes with different computing power, thus greatly reducing the running time of the algorithm. In [24], the JA-ABC algorithm is proposed, which mainly improves the operation speed of the algorithm and solves the premature convergence problem by mutation of the lowest feasible solution of the fitness function.
For the sake of improving the performance of the ABC algorithm, many studies in the literature have combined the ABC algorithm with other optimization algorithms. In [25], a fusion algorithm of least squares (LS) and ABC is proposed. The main purpose of the algorithm is to use LS to optimize the linear part of the search space and solve the problem of slow search speed. A combination of the differential evolution (DE) algorithm and ABC was proposed to avoid premature convergence of the algorithm [26]. In [27], PSO is combined with ABC to accelerate the convergence speed of the algorithm and expand the spatial search capability. In [28], a fusion algorithm of quantum evolution (QE) and ABC is presented, which greatly improves convergence speed, retains effective information, and expands the population distribution. In [29], an approach was proposed to fuse the harmony search (HS) algorithm with ABC algorithm. This algorithm adopts the multimodal fitness surface method to tolerate premature and slow convergence of harmony search, improving the algorithm’s performance. Another approach was proposed to combine the ant colony algorithm (ACO) and ABC in [30]. The fusion algorithm uses the simplicity and robustness of the ACO algorithm, and the ABC algorithm avoids the global search ability of the local optimal solution, allowing it to quickly find the global optimal solution.
Some of the classic ABC variants are very popular. For example, the global optimal guided ABC (GABC) algorithm [31] combines the information of the global best (gbest) solution into solving the search equation, so as to ameliorate the development ability of the approach. The performance is verified in several benchmark sets. A new global optimal ABC (MABC) algorithm [32] had some enlightenment from the differential evolution (DE) algorithm. The main improvement strategy is to search the region near the global optimal solution of the previous iteration to generate candidate solutions. In addition, the chaotic system and the learning method based on opposition are used to enhance the global convergence in the stage of population initialization and scout bee search. In [33], a new ABC algorithm based on opposition (O-ABC) is proposed, which enhances the two-stage foraging process, accelerates convergence, and enhances the development ability of ABC. An improved ABC algorithm (IABC) [34] was proposed to solve continuous optimization problems. The algorithm is ameliorated on the basis of GABC, and the improved solution search equation is used to ameliorate the development ability in the bee observation stage.
Proposed approach
This section describes the proposed QABC algorithm in more details.
Initialization
The initialization phase is the same as the original ABC algorithm.
New dimension selection
In the original ABC algorithm, when each individual is updated, a dimension of the individual will be randomly selected to generate a new candidate position, as shown in Equation (2). Although this method ensures the correctness of location update, it reduces the efficiency of calculation. For the sake of improving the efficiency of the algorithm, when selecting an individual to update, it does not just select one dimension, but updates multiple dimensions of the individual.
New search strategy
In geometry, affine transformation is used to describe the transformation of a vector space into another vector space through linear transformation and translation. The transformation function is usually Y = AX+B. The quasi affine transformation method
Formula (4) gives a new location update formula. The gbest is the global optimal, and q is a constant as a control parameter. As shown in the formula, the current position update is the ith bee, r1 and r2 are other randomly selected individuals, and i ≠ r1 ≠ r2. When the position is updated, the matrix A also selects the ith row element for calculation. As shown in the formula, the new location is a collection of the original bee’s location, the global optimal location, and the other two bees’ location, thus reflecting the coordination of the individual population in the search process, while the matrix A fully guarantees the integrity of the search.
Equation (5) shows a matrix transformation, in which A is a collaborative search matrix with the same size as the feasible solution matrix X, the population size SN is the number of rows, and the dimension size D is the number of columns. It is transformed from the lower triangular matrix generated by initialization. The transformation is completed by two successive steps. The first one is to replace the row elements of the matrix immediately, and the second one is to replace the row vectors of the matrix without changing the position of the row elements. After these two steps, the matrix A in the equation is determined
After discussing the details of algorithm improvement, the following Algorithm 1 shows the proposed QABC algorithm.
Experiment analysis
As we all know, it is difficult to evaluate the performance of an algorithm, especially, if we want to evaluate the algorithm completely and reliably, then we need to evaluate it from many different aspects. At present, there are some benchmark function sets that specifically provide for the performance comparison of algorithms in the world. In this paper, the CEC2013 test suite [35] and CEC2014 test suite [36] are used to evaluate the performance of the proposed QABC algorithm. These two test suites have 58 actual parameter single objective optimization benchmarks, all problems are considered as black-box problems, and their search scope is [– 100, 100]. Among the 28 functions of the CEC2013 test suite, they can be divided into three categories: fa1-fa5 is unimodal functions, fa6-fa20 is basic multimodal functions, and fa21-fa28 is composition functions. The 30 functions in the CEC2014 test suite can be divided into four categories: fb1-fb3 is unimodal functions, fb4-fb16 is simple multimodal functions, fb17-fb22 is hybrid function 1, and fb23-fb30 is composition functions.
In the experiment, our algorithm QABC is compared with the conventinal ABC algorithm and some famous ABC variants to verify its performance. ABC variants include GABC algorithm, IABC algorithm, MABC algorithm, and O-ABC algorithm. The colony size of all bee colony algorithms is set to 50, and the parameter limit is set to D * SN / 2, where SN is the population number and D is the dimension size. In addition, the parameter MR is set to 0.3 in the IABC algorithm, and the parameter q is set to 0.6 in the QABC algorithm.
We carry out experiments on Windows 10 professional operating system with 8 GB RAM and 2.60 GHz Intel i5-4210 m processor. All the comparison algorithms are run on MATLAB 2019a. Here, the fitness errors less than EPS = 1e-14 are set to 0. To be fair, we conduct 51 independent experiments for all the compared algorithms, where maxFES is set to 10e4 * D, and where D indicates the dimension size.
Performance comparison of optimization accuracy
In the CEC2013 test suite, all algorithms are compared with dimensions of 10D, 30D, and 50D. The comparison results of the experiment are presented in Table 1, Tables 2 and 3. We draw the following conclusions, First, for 10D optimization, as shown in Table 1, among the 28 benchmark functions, compared with ABC algorithm and O-ABC algorithm, 19 functions show that QABC algorithm has better or similar results; Compared with GABC algorithm and IABC algorithm, 18 functions show that QABC algorithm has better or similar results; and Compared with MABC algorithm, 20 functions show that QABC algorithm has better or similar results. The optimization of 30D is shown in Table 2. Among the 28 benchmark functions, compared with ABC algorithm, GABC algorithm and O-ABC algorithm, 18 functions show that the novel QABC algorithm has better or similar results; Compared with IABC algorithm, 17 functions show that the novel QABC algorithm has better or similar results; and Compared with MABC algorithm, 25 functions show that the novel QABC algorithm has better or similar results; Finally, the optimization of 50D is shown in Table 3. Among the 28 benchmark functions, compared with the ABC algorithm, GABC algorithm, and O-ABC algorithm, 18 functions show that the novel QABC algorithm has better or similar results; compared with the IABC algorithm, 20 functions show that the novel QABC algorithm has better or similar results; and compared with the MABC algorithm, 26 functions show that the novel QABC algorithm has better or similar results. In general, we can see that the novel QABC algorithm is more powerful.
Comparison results on 10-D optimization under CEC2013 test suite
Comparison results on 10-D optimization under CEC2013 test suite
Comparison results on 30-D optimization under CEC2013 test suite
Comparison results on 50-D optimization under CEC2013 test suite
In the CEC2014 test suite, all algorithms are compared with dimensions of 10D, 30D, and 50D. The comparison results are summarized in Table 4, Tables 5, and 6. We can draw the following conclusions. First, the optimization of 10D is shown in Table 4. Among the 30 benchmark functions, 20 of them show a performance improvement of QABC in comparison with the ABC algorithm; compared with the GABC algorithm and IABC algorithm, 18 functions show that the QABC algorithm has improved performance; and compared with the MABC algorithm and O-ABC algorithm, 23 functions show an obvious performance improvement of the QABC algorithm. The optimization of 30D is shown in Table 5. Among the 30 benchmark functions, compared with the ABC algorithm and IABC algorithm, 16 functions show a performance improvement of the QABC algorithm proposed in this paper; compared with the GABC algorithm, 17 functions show a performance improvement of the QABC algorithm; compared with the MABC algorithm, 23 functions show a performance improvement of the QABC algorithm; and compared with the O-ABC algorithm, the performance of 20 functions is better. Finally, the optimization of 50D is shown in Table 6. Among the 30 benchmark functions, compared with the ABC algorithm and GABC algorithm, 16 functions show a better or similar performance of the QABC algorithm proposed in this paper; compared with the IABC algorithm, 17 functions show a performance improvement of the QABC algorithm; compared with the MABC algorithm, 24 functions show a performance improvement of the QABC algorithm; and compared with the O-ABC algorithm, 19 of the functions show improved performance. In general, the novel QABC algorithm dominates the competition in comparison with original ABC algorithm or those famous ABC variants.
Comparison results on 10-D optimization under CEC2014 test suite
Comparison results on 30-D optimization under CEC2014 test suite
Comparison results on 50-D optimization under CEC2014 test suite
The proposed QABC algorithm can still be verified from the perspective of the convergence rate. As shown in Figs. 1 4, the convergence rate curve of the QABC algorithm is compared with that of other algorithms. In Fig. 1, our novel QABC algorithm is obviously the best in the fa2, fa4, fa6, fa7, fa9, and fa7 functions. It is similar to other algorithms in the fa1 function, and the ABC algorithm is the best in fa8. In Fig. 2, our novel QABC algorithm performs best, except for the fa28 function, where the O-ABC performs best. As can be seen in Fig. 3, the QABC algorithm proposed in this paper performs the best, except for the fa9 function. In Fig. 4, our novel QABC algorithm performs best in fb17, fb18, fb19, fb20, and fb21 and is also competitive in fa13, fa15, and fa29. As a result, compared with the original ABC algorithm or other ABC variants, QABC still has stronger convergence speed.
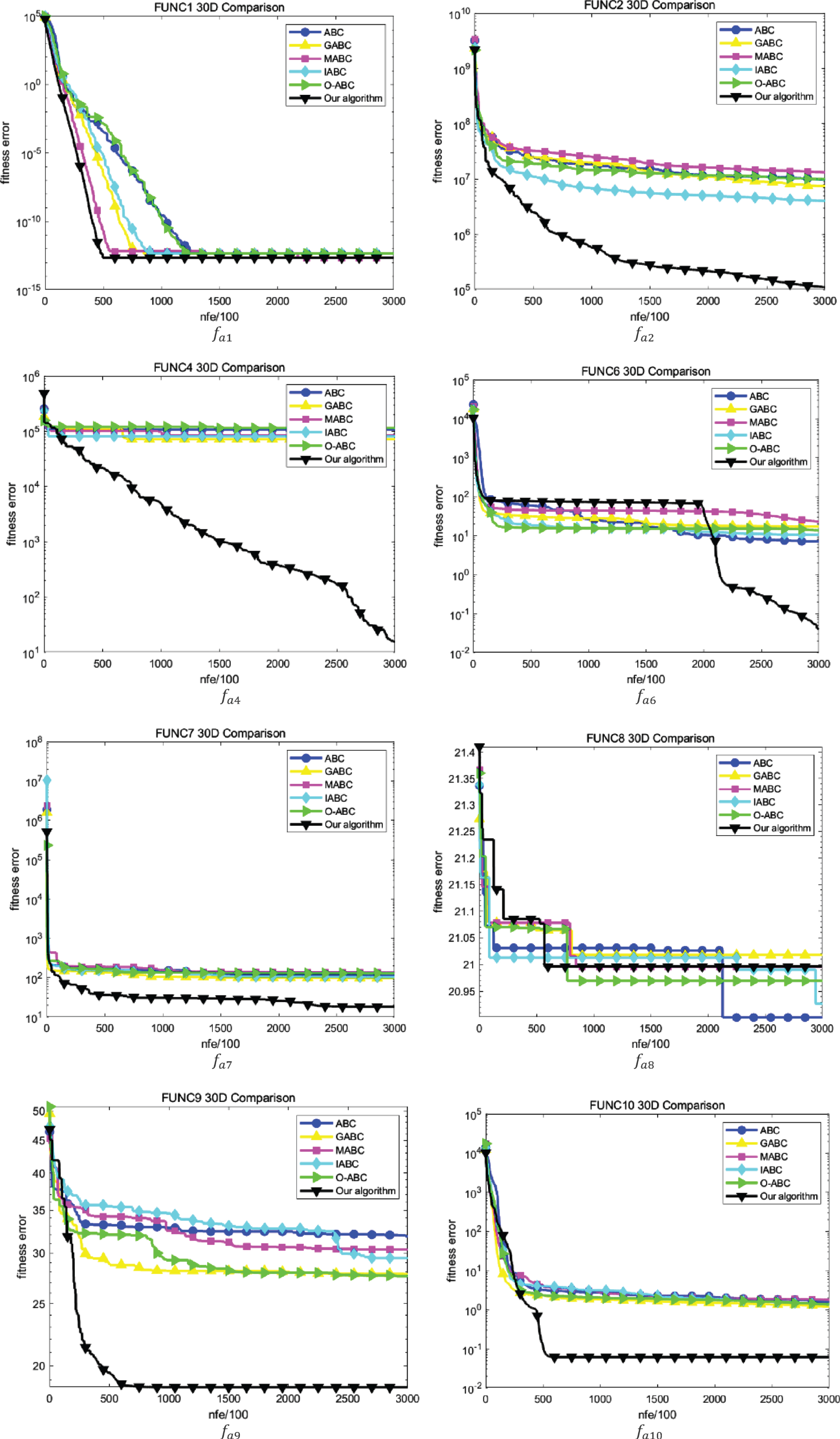
The convergence curves of six ABC algorithms on some functions with D = 30 on CEC2013.
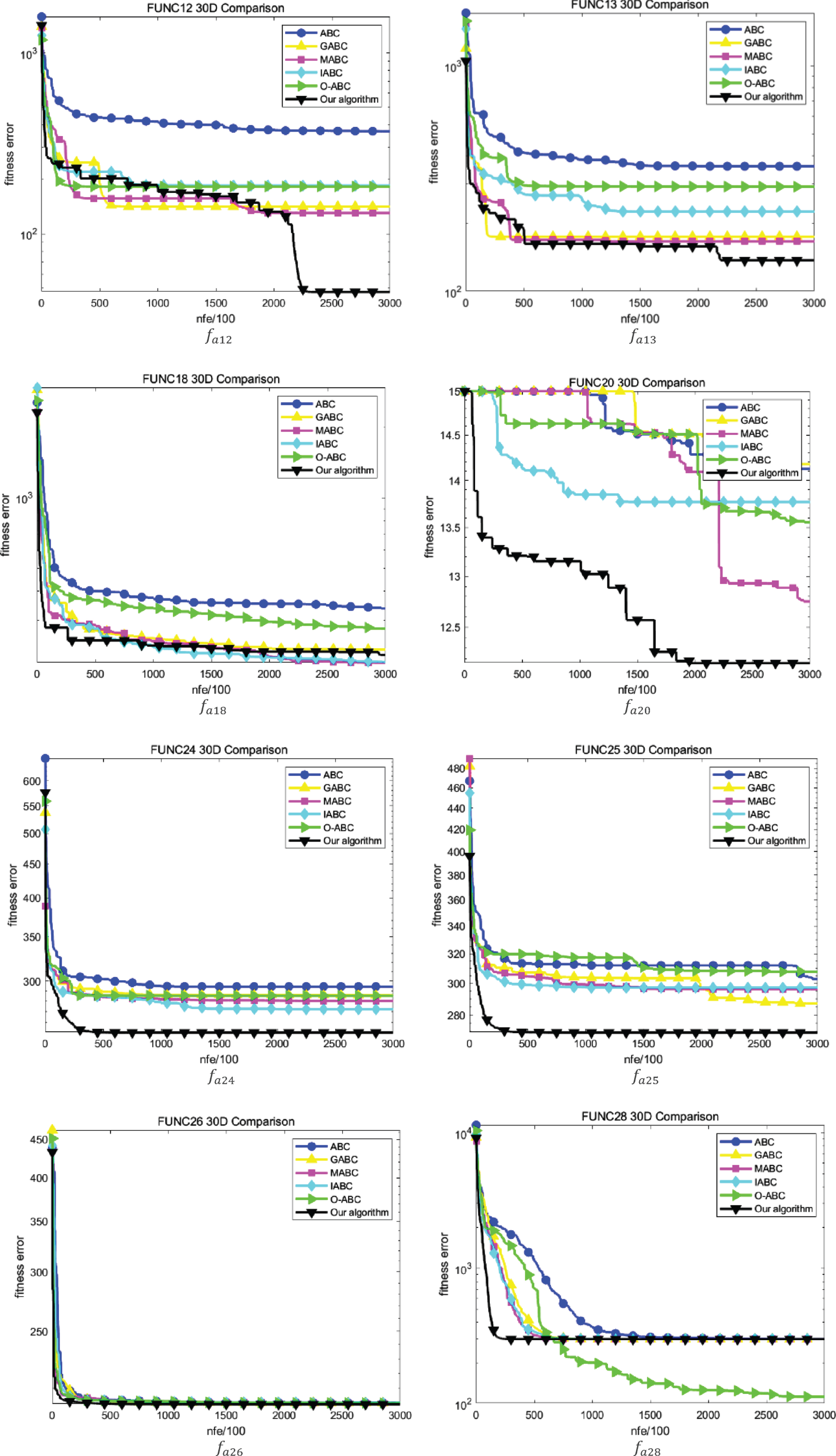
The convergence curves of six ABC algorithms on some functions with D = 30 on CEC2013.
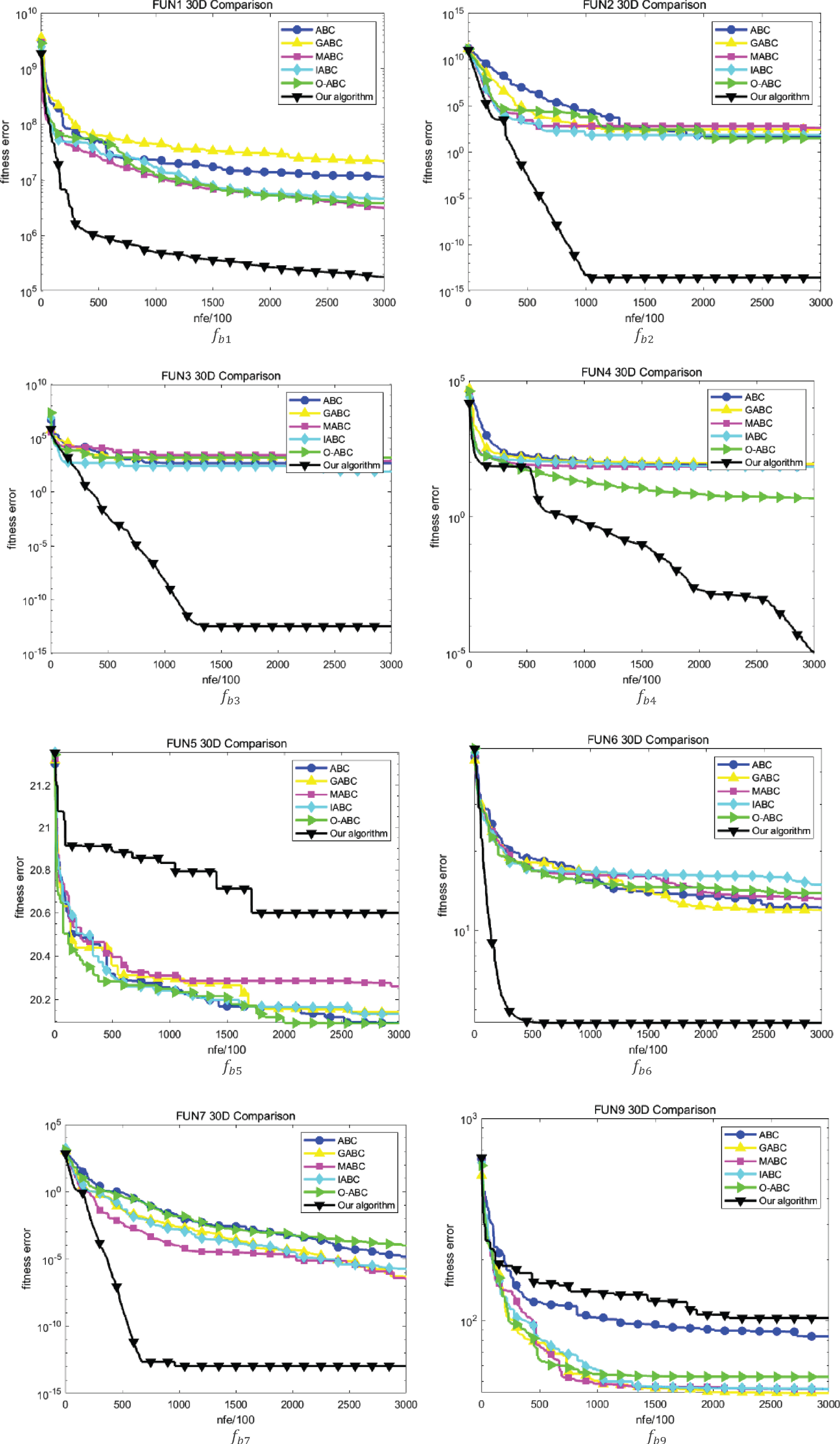
The convergence curves of six ABC algorithms on some functions with D = 30 on CEC2014.

The convergence curves of six ABC algorithms on some functions with D = 30 on CEC2014.
In order to calculate time complexity, we need to evaluate three different values: T0, T1, and T2. The time consumption of the basic arithmetic expression recommended in CEC2013 competition is T0. The evaluation time T1 is 200000 evaluations of test function 14 in dimension 30D, where T2 is the running time of test function 14 on the complete algorithm, and the maximum number of tests is 200000. Finally, time complexity is determined by the formula
Time complexity comparison under 30D CEC2013 benchmark 14
Time complexity comparison under 30D CEC2013 benchmark 14
This paper proposes the QABC algorithm. In this algorithm, a new search equation is proposed, which greatly enhances the exploitability of the algorithm by enhancing the information sharing among groups. In each location update, it is no longer like the traditional ABC algorithm to update a single dimension, but through the collaborative search matrix randomly select different number of dimensions to update, which improves the convergence speed of the algorithm. In the overall search framework, a collaborative search matrix is introduced. The collaborative search equation uses the lower triangular matrix transformation to update the position of particles, thus ensuring the integrity and balance of information sharing among particles. In the experiment, 58 benchmark functions in the CEC2013 and CEC2014 test suites are used. By comparing with the original ABC algorithm and some famous ABC variants, the superiority of the proposed QABC algorithm in development ability and efficiency is effectively proved. In the future, this algorithm will be further utilized to solve some practical engineering problems like unmanned aerial vehicle path planning [37, 38].
Footnotes
Acknowledgments
This work was supported by the Fujian University of Technology under Grant GY-Z20016 and GY-Z18183, and by the Fujian Provincial Natural Science Foundation under Grant 2017J01730.