
Abstract
The ship target recognition (STR) is greatly related to the battlefield situation awareness, which has recently gained prominence in the military domains. With the diversification and complexity of military missions, ship targets are mostly performed in the form of formations. Therefore, using the formation information to improve the accuracy of the ship target type recognition is worth studying. To effectively identify ship target type, we in this paper jointly consider the ship dynamic, formation, and feature information to propose a STR method based on Bayesian inference and evidence theory. Specifically, we first calculate the ship position distance matrix and the directional distance matrix with the Dynamic Time Warping (DTW) and the difference-vector algorithm taken into account. Then, we use the two distance matrices to obtain the ship formation information at different distance thresholds by the hierarchical clustering method, based on which we can infer the ship type. Thirdly, formation information and other attribute information are as nodes of the Bayesian Network (BN) to infer the ship type. Afterward, we can convert the recognition results at different thresholds into body of evidences (BOEs) as multiple information sources. Finally, we fuse the BOEs to get the final recognition. The proposed method is verified in simulation battle scenario in this paper. The simulation results demonstrate that the proposed method achieves performance superiority as compared with other ship recognition methods in terms of recognition accuracy.
Keywords
Introduction
Ships are the focus of monitoring and attacking maritime targets in sea battlefields [1]. The ship target recognition (STR) is the premise and key of ship tactical intention recognition and battlefield situation map construction. In modern war, the STR is widely used in early warning detection, precise guidance, battlefield command and other military files. Besides, the STR is also widely used in civilian fields, such as maritime search and rescue, sea and port monitoring, maritime traffic, and marine resource development [2, 3]. Hence, it attracts great attentions among many researches [4–6]. With the increasingly complex situation of marine safety, the STR technology is gradually developing to the direction of organic fusion of multiple signal sources to further improve the recognition accuracy. Therefore, the STR is a very important issue in target recognition.
Up to now, the STR methods are mainly based on image [3], high-resolution range profile (HRRP) [7], and low-resolution radar detection data [8]. Several schemes of image-based including visible image [9], infrared image [10–12], remote sensing image [13], and synthetic aperture radar (SAR) image [14–16] are deployed for ship recognition. Nevertheless, image-based method uses the static image information of the ship target at a certain moment, and the visible light or infrared image is susceptible to weather factors and noise [17], affecting the accuracy of ship recognition. Besides, limited by the image acquisition system, this method is more suitable for detecting ships targets in inshore areas. The HRRP can detect ship targets in the distant sea area, and characterize the ship structural features finely [18, 19]. This paper foucuses on target recognition based on low-resolution radar detection data. Xie et al . in [20] proposed a new approach to target recognition based on gray correlation analysis, which carried out grey correlation analysis on ship target acoustic signals, and recognized two types of ship targets through simulation data. The correct recognition rate of the first type of target and the second type of target reached 89% and 100% respectively.
However, the rapid development of ship technology has caused radar echo signals to overlap significantly, resulting in large errors in the target attribute information obtained, such as radar cross section (RCS) [21]. Hence, the accuracy of ship target recognition may be low. In addition, naval ships appear in formation in modern naval warfare, which is also a key factor in recognizing ship types.
In view of above issues, we jointly consider dynamic, static information, formation information among ships (whether a ship belongs to a formation, and how many ships in a formation), and feature information to recognize ship targets in offshore area. First, low-resolution radar is utilized to obtain related information of ship targets for some time. The related information comprise of speed, RCS, pulse width, and location, etc. The location information forms tracks of all ship targets. Second, considering the ambiguity and uncertainty of detection information, the tracks are analyzed based on hierarchical clustering algorithm to obtain the formation information under different distance thresholds. To a certain extent, it can avoid the wrong division of ships. For example, those who were not part of the ship formation were mistakenly identified as belonging to the formation. Meanwhile, the results under different thresholds are as multi-source to improve recognition accuracy for the next steps. Third, the formation information under different thresholds and other feature information are used to inference the probability that the target is a naval ship by using multiple Bayesian network. Finally, the results are converted to basic probability assignments (BPAs), then fused based on Dempster combination rule, so that we can evaluate the final reliability that a ship target is a naval ship. Also, we simulate a simple scenario to evaluate the effectiveness of proposed method.
In this paper, we propose a multi-source information fusion method for STR based on Bayesian network (BN) and evidence theory, namely MSIF-STR. Compared with the traditional ship recognition methods, the proposed method can still effectively recognize the ship type when the deviation of some feature information is large.
The remainder of this paper is organized as follows. In section 2, the preliminaries about dynamic time warping algorithm, Bayesian network and evidence theory are introduced. Section 3 elaborates on the proposed target recognition method. In section 4, verification of the proposed method on a simulation scenario is analyzed and illustrated. Conclusions are summarized in section 5.
Preliminaries
In this section, we introduce some preliminaries that need to be used.
Dynamic time warping (DTW) algorithm
The DTW Algorithm was first proposed by Itakura in 1975 [22] to measure the similarity between two time series with different lengths [23]. The detail process of DTW Algorithm is as follows.
Let T1 and T2 represent two time series with lengths N and M, which can be expressed as:
Then, the distance between the two time series can be calculated as:
For the warping path s, we first need to construct a matrix grid SN×M, where S (i, j) refers to the euclidean distance d (T1 (i) , T2 (j)) between T1 (i) and T2 (j). Then, the warping path s is a shortest path from S (1, 1) to S (T1 (N) , T2 (M)), as shown in Fig. 1. It should be noted that the warping path s meets the following three conditions. Boundary: The warping path s must start at S (1, 1) and end at S (T1 (N) , T2 (M)). Continuity: The warping path s is not aligned across a point. Monotony: The warping path s must be monotonous over time.
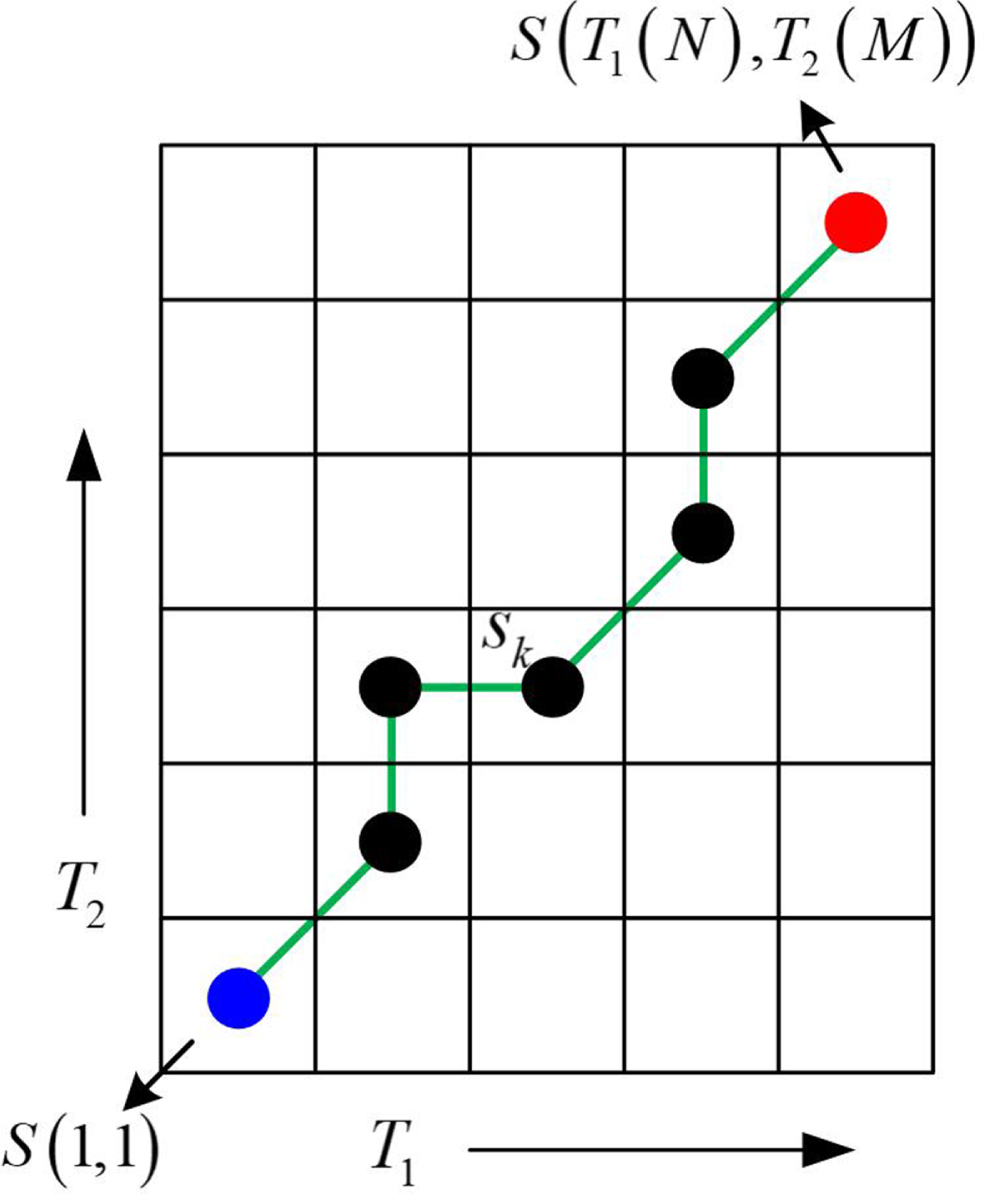
An example warping path s.
Hierarchical clustering is a kind of clustering algorithm, which creates a nested hierarchical clustering tree by calculating the similarity among data of different categories. In a cluster tree, the original data of different categories are the lowest layer of the tree, and the top layer of the tree is the root node of a cluster. There are two kinds of methods to create a clustering tree: bottom-up merging and top-down splitting, which called agglomerative hierarchical clustering algorithm and split hierarchical clustering algorithm.
AGNES algorithm [24] is a common representative agglomerative hierarchical clustering algorithm. Each sample is first treated as a cluster, and then these clusters are merged into larger clusters until all samples are in the same cluster or the termination condition is met. The specific algorithm flow is shown in Table 1.
The specific flow of AGNES algorithm
The specific flow of AGNES algorithm
The Bayesian network (BN) [25], first proposed by pearl, is an effective theoretical model in the field of uncertain knowledge expression and inference [26–28]. A BN includes a directed acyclic graph (DAG) and a conditional probability table (CPT). Each node in the DAG represents a random variable, which can be a directly observable variable or a hidden variable, while a directed edge represents a conditional dependency between the random variables. This method can be widely used in the fields of target recognition [33], fault diagnosis [34], medical diagnosis [35] and risk analysis [36]. The definition of BN is as follows:
Besides, the inference algorithm is also key to this method. At present, precise inference algorithms and approximate inference algorithms are commonly used inference algorithms [31, 32]. When the scale of a BN is not large, the former can be performed. When the scale of a BN is large, the latter is often used [37].
Evidence theory, also called D-S evidence theory, is a mathematical theory of multi-source information proposed by Dempster and expanded by Shafer [38,39, 38,39]. This method can effectively cope with uncertainty [38, 40–43]. It is widely used in fault diagnosis [44–47], fusion decision [48–52], and so on. The definitions about this theory are as follows:
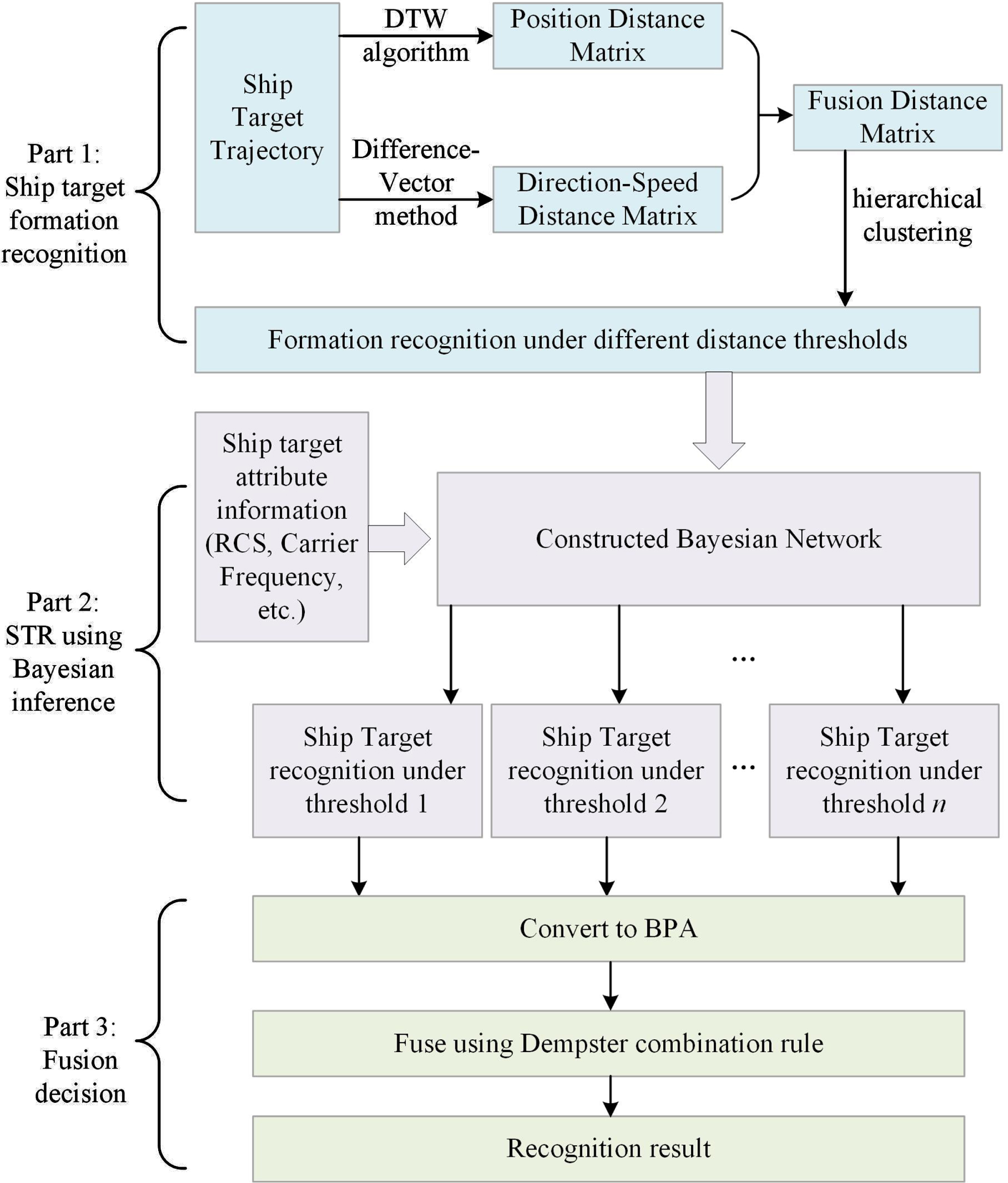
STR has always been an indispensable part of battlefield situation assessment. In this section, we propose a multi-source information fusion method for ship target recognition based on Bayesian inference and evidence theory, namely MSIF-STR. The detail description of the method MSIF-STR is shown in Fig. 1. The method MSIF-STR includes three parts to recognition ship target, namely ship target formation recognition, STR using Bayesian inference, and fusion decision.
Part 1: Ship target formation recognition
Naval ships often operate in formations, so the analysis of target formation attributes has certain guidelines for their type identification. In this part, firstly, the fusion distance matrix D (T i , T j ) between target tracks is calculated from three aspects: target position, heading and speed. Then, all ships are clustered under different track distance based on hierarchical clustering algorithm. Finally, multiple distance thresholds are calculated by clustering algorithm to obtain the reasonable formation information.
As for the selection of thresholds, the distance between clusters obtained by the ships clustering is first clustered by hierarchical clustering algorithm, and selects the maximum value in this class as the first threshold. Then, the larger threshold nearest the first threshold is the third threshold. Finally, the average value of the first threshold and the third threshold is taken as the second threshold.
The detail solution process of D (T
i
, T
j
) is described below: Step 1: The position distance matrix D1 (T
i
, T
j
) among multi-targets is calculated based on DTW algorithm, mentioned in Section 2. Step 2: The direction-speed distance matrix D2 (T
i
, T
j
) is calculated by:
Step 3: D (T
i
, T
j
) is calculated as:
We assume that w1 = w2 = 0.5.
In this part, the formation information, speed, carrier frequency and other target attribute information are used to construct Bayesian network to recognize type of ship target. The constructed Bayesian network is shown in Fig. 3.
The flow-process of the proposed method.
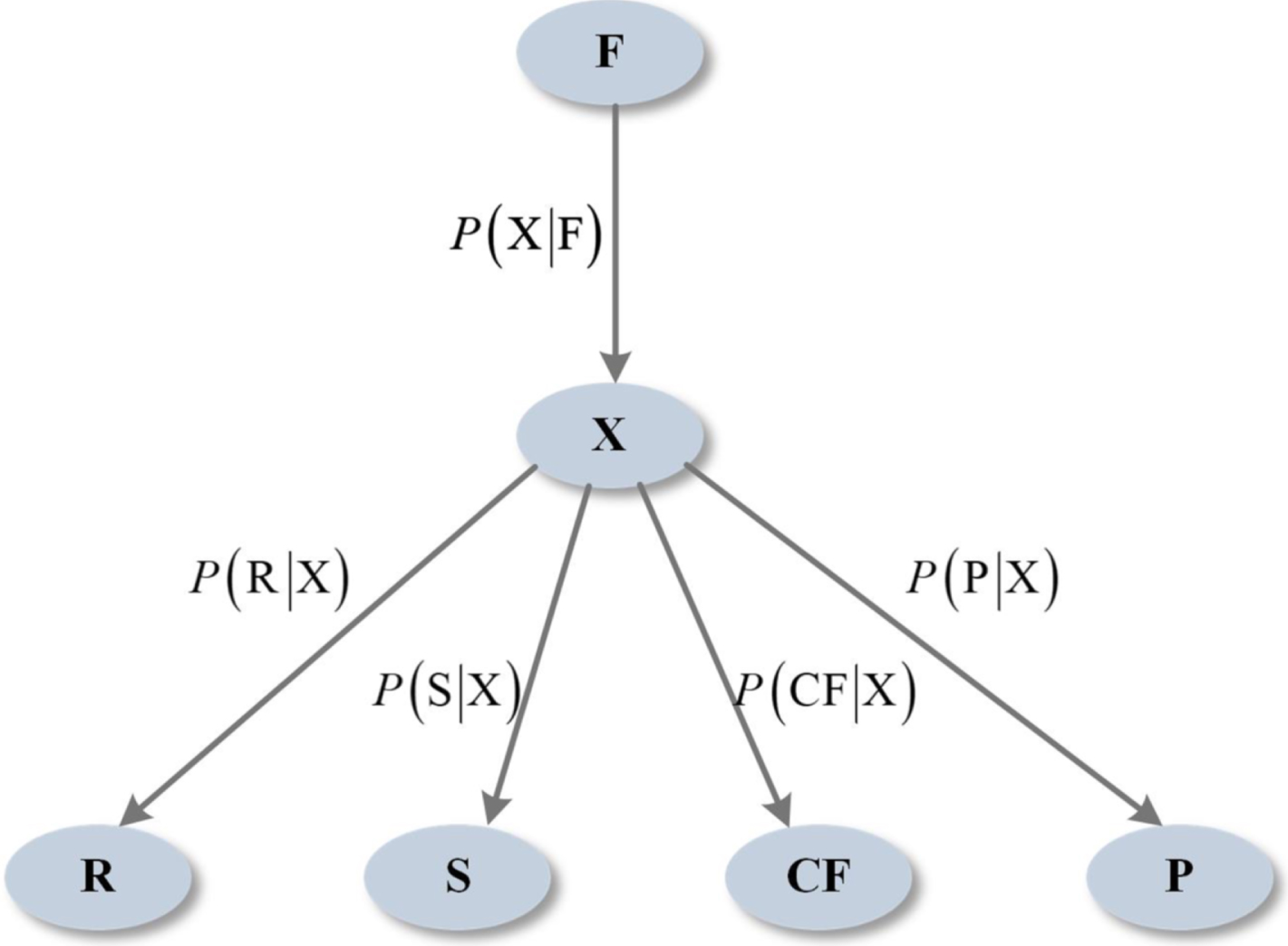
The constructed Bayesian network.
The state of each node is defined by consulting the relevant materials and application requirements, as shown in Table 2.
The state of each node in the constructed Bayesian network
In addition, due to the lack of combat samples, the conditional probability table (CPT) is determined based on expert knowledge, as shown in Table 3. It should be noted that the conditional probability of node F varies with the number of ships included in the formation.
The CPT of constructed Bayesian network
After the Bayesian network and CPT are determined, the target formation information obtained in the part 3.1 and the corresponding target attribute information can be input into the Bayesian network for reasoning. Considering the small scale of constructed Bayesian network, the connection tree reasoning algorithm is used for reasoning recognition.
In the part 3.2, the probability that the target is naval ship or civilian ship under multiple thresholds can be obtained. That is, the inference results of multiple Bayesian networks can be obtained. However, how to get more reliable target types based on these results. In this part, we use them as different information sources to convert to BPAs for fusion decision. The specific process is described below. Step 1: Adjust reliability of information source
Different distance thresholds have different reliability of identifying targets belonging to formations, and furthermore, reliability of target type probabilities obtained by Bayesian reasoning. Obviously, the smaller the distance threshold, the higher the reliability of the recognition. Therefore, in this paper, the weight of each information source is generated according to formula 10, so as to adjust its reliability.
Step 2: Information sources convert to BPAs
As discussed in [54], the results obtained by part 3.2 are converted to BPAs as:
In this paper, the FOD is {NavalShip, CivilianShip}, then its power set contains these propositions: {NavalShip}, {CivilianShip}, {NavalShip, CivilianShip} and empty set. Take these propositions as a vector, and each proposition value of corresponding BOE as a standard feature vector. Since the belief value assigned to the empty set is always 0 in evidence theory, it is not considered in this vector. And take the converted BPA as the unknown vector. Calculate the distance between the unknown vector and the standard feature vector, that is E
n
, and assign the E
n
to the whole set. Besides, the probability distribution is appropriately modified to reduce the possibility of misidentifying to some extent. Hence, the adoption of E
n
contribute to the final recognition accuracy. Step 3: Fuse BPAs and make decision
The BPAs are fused based on Dempster combination rule mentioned in section 2. Then, the ship type can be determined based on the fusion result. The focal element with the highest reliability (at least greater than 0.5) is the final decision result.
In order to verify the effectiveness of the proposed method, two simulation scenarios are used as examples in this section.
Case 1: One formation in the simulation scenario
In this simulation scenario, a naval ship formation (including 10 naval ships, numbered 1 ∼ 10) and 10 civilian ships (numbered 11 ∼ 20) are included. Among them, the formation is a common defense formation, as shown in Fig. 4. Besides, naval ships are distributed in a designated distribution area with a radius of 100 km. The speed of the naval ships is set at about 18 kn/h, and the distance between the two adjacent naval ships is 2 km. The speed range of civilian ships is 3 ∼ 16 kn/h, and they are randomly distributed in the cruise area.
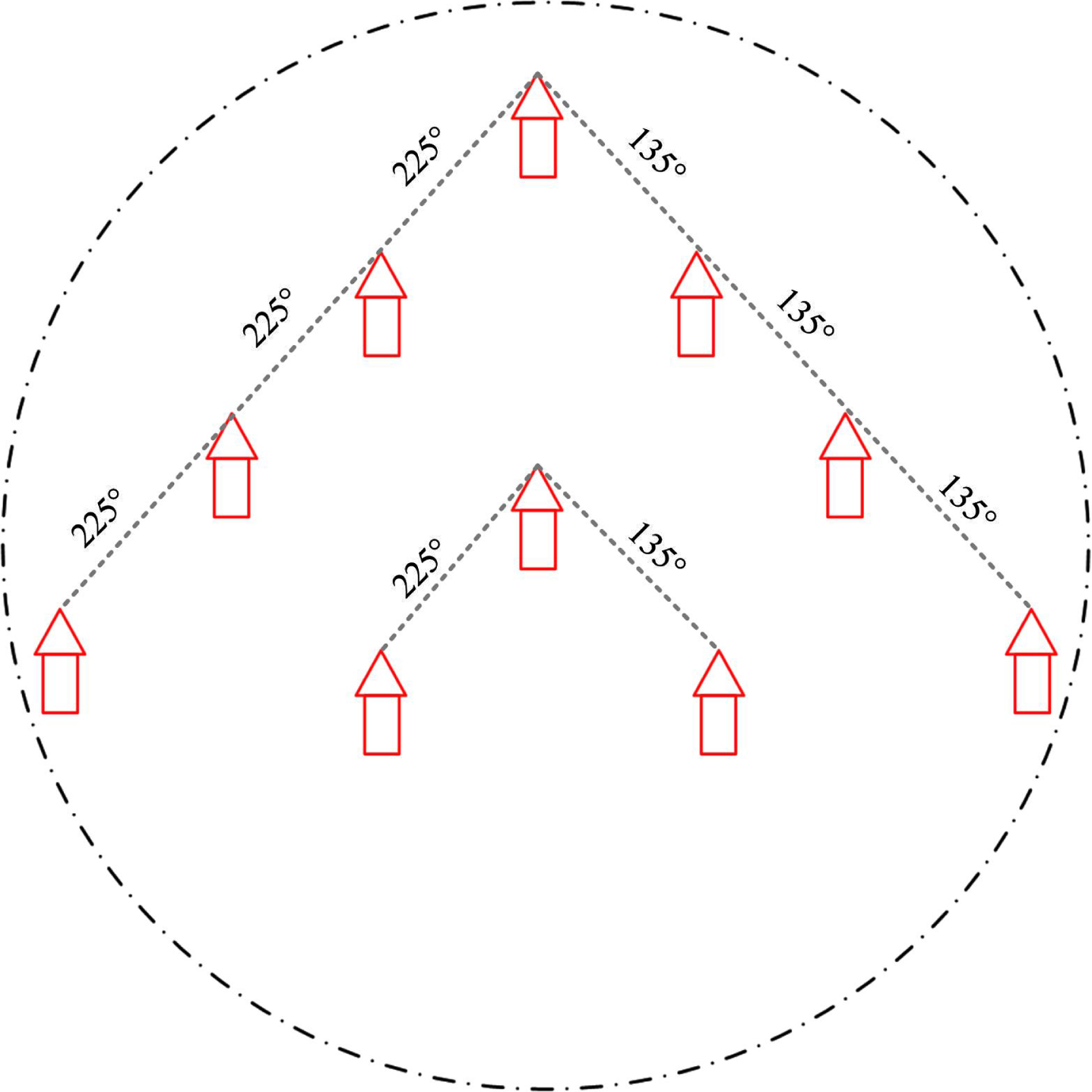
The formation in Case 1.
The generated trajectory of all ships is shown in Fig. 5. In addition, it is assumed that the attribute information of some targets detected by the radar is shown in Table 4. The detailed process of ship recognition is verified in the following text.
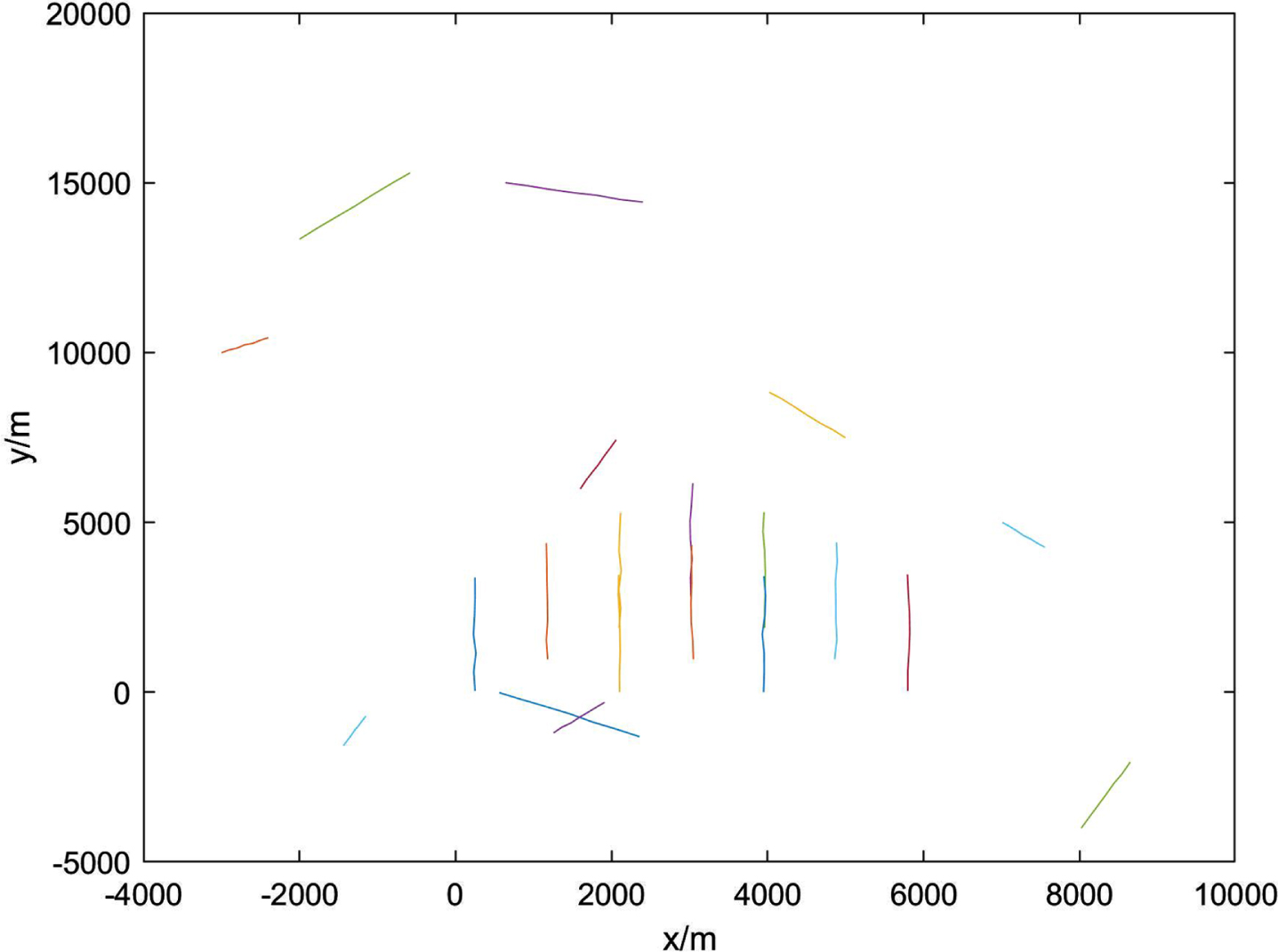
The generated trajectory of all ships in Case 1.
Ship target attribute data detected by radar
Firstly, the distance matrix D (T i , T j ) among all ships is calculated according to Eq.(3), Eq.(4), Eq.(8), and Eq.(9). Then, we utilize AGglomerative NESting (AGNES) algorithm to cluster the distance matrix. The clustering result is shown in Fig. 6. It can be seen that the distance among ships 1 ∼ 10 is less than 0.1, while larger among ships 11 ∼ 20. In addition, the minimum distance between the two types of ships is greater than 0.5. Therefore, trajectories of the ships numbered 1 ∼ 10 are similar, and the trajectories distance are smaller, which is consistent with the simulation scenario. It also illustrates the effectiveness of the DTW algorithm.
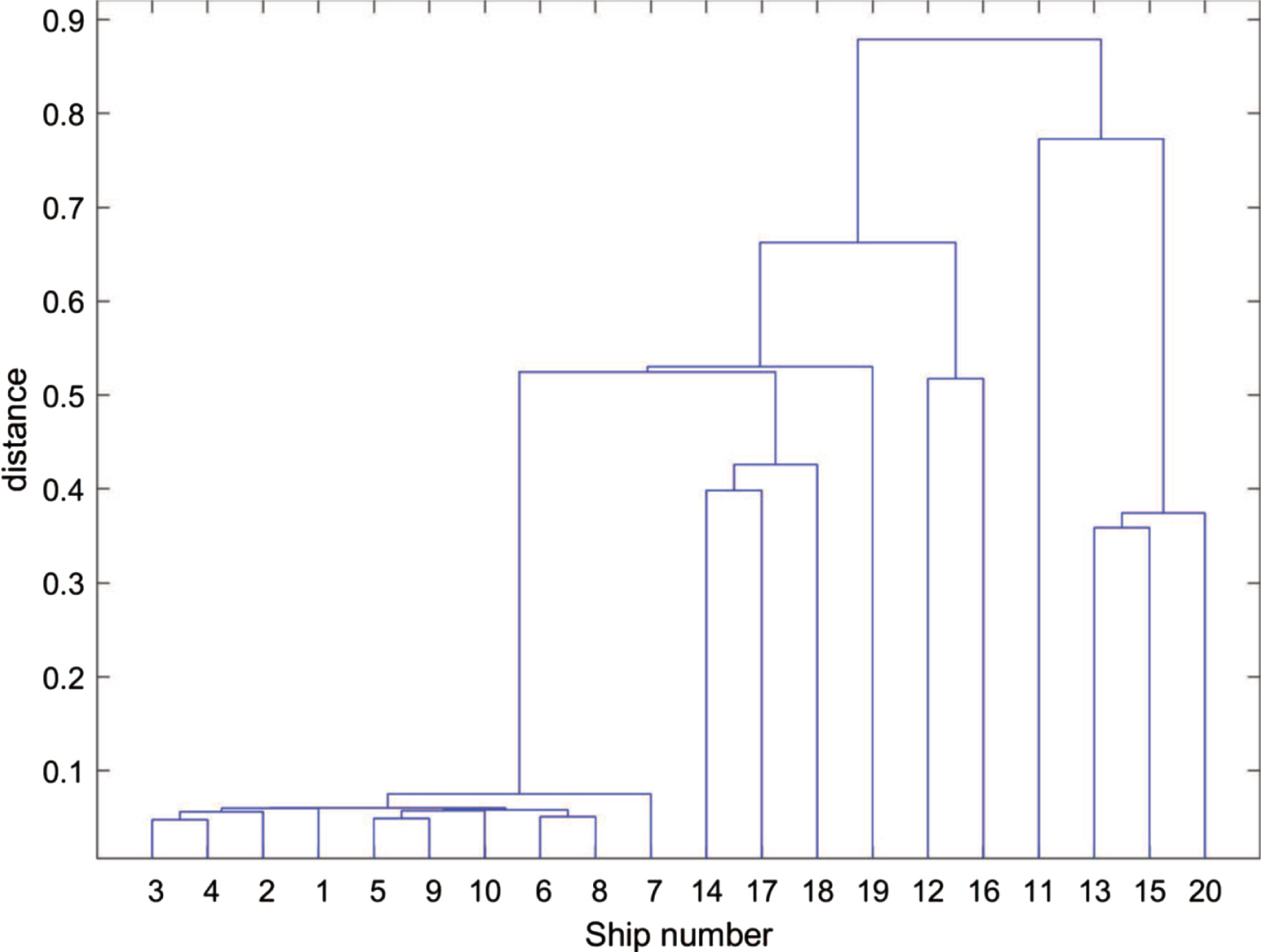
Hierarchical clustering results of ship trajectories in Case 1.
Finally, considering that the number of ships in the formation may be too much or missed if only one threshold is selected, three different thresholds(obtained by clustering algorithm), 0.0754, 0.2171, 0.3588, are selected in this paper based on the clustering results. And the formation recognition results under the selected thresholds are shown in Table 5. Table 5 shows that under threshold 1 and threshold 2, ships numbered 1 ∼ 10 are identified as a formation, and ships numbered 11 ∼ 20 are not identified as a formation. Under threshold 3, ships numbered 13 and 15 are also recognized as a formation. Comparing with Fig. 6, it can be seen that, except for the distance between ships numbered 1 to 10, the distance between ships numbered 13 and 15 is less than 0.4.It indicates that the threshold selection is appropriate. Obviously, if there is an error in the trajectorie of a ship in the formation, the multi-threshold recognition method can avoid being mistakenly recognized as not belonging to the formation.
Formation recognition results under different thresholds in Case 1
In this application, the formation identification results and attribute information of all ships are input to the constructed Bayesian network to obtain the probability that the type of target is a naval ship.
We assume that if a ship is judged to belong to a formation, the probability of it being identified as a naval ship should be greater according to Table 3.
Taking ship 13 as an example, if the recognition results of a ship belonging to the formation under different thresholds are different, the inference result are:
It can be seen that when a ship is judged as one of the formation, it is more likely to be recognized as a naval ship, which is consistent with the hypothesis of this article.
Besides, the proposed method can effectively recognize ship target even if the deviation of some attribute information is large. Taking ship 1 as an example, the corresponding attribute information are:
RCS = 10000 m2, Pulse = 31 μs, Carrier Frequency = 4.3 GHz, speed = 18 kn/h.
According to the state of nodes and the CPT, when the RCS is greater than 50000 m2, the probability of the ship target being recognized as a warship is greater. However, the RCS of ship 1 is much less than 50000 m2.
The inference results based on multiple Bayesian network are:
This shows that even when the detection error of RCS and pulse width attribute information is large, the method in this paper can still correctly identify the target type.
Fusion decision
D-S evidence theory is utilized to effectively fuse the results under different thresholds. It should be noted that each threshold has a recognition result. Obviously, the clustering results under different thresholds contribute differently to the final recognition result. In other words, the smaller the threshold, the more reliable the clustering results obtained, and more weight should be given. Step 1: The inference results under different thresholds are multiplied by weights. The weights are calculated according to Eq.(10). Step 2: The results of Step 1 are converted to BPAs according to Eq.(11) and Eq.(12). Step 3: Fuse BPAs based on Dempster combination rule.
The BPAs converted from information sources under different thresholds are drawn in Table 6.
The BPAs converted from information sources under different thresholds in Case 1
The BPAs converted from information sources under different thresholds in Case 1
Based on the Dempster combination rule, the fusion recognition results of all ships are shown in Table 7.
Fusion results based on the Dempster combination rule in Case 1
As can be seen from Table 7, ship 1 ∼ 10 are recognized as naval ships, while ship 11 ∼ 20 are recognized as civilian ships, which is consistent with the simulation scenario. Besides, compare Table 6 with Table 7, it can be found that the belief value of ships 1 ∼ 10 identified as naval ships after fusion is greater than that under any threshold value, indicating that the belief value of target recognition is indeed improved after using of Dempster combination rule. Similarly, ships 11 ∼ 20 are recognized as civilian ships with high belief value. This results show that the proposed method is effective for identifying types of ship target.
In this simulation scenario, two naval ships formations (one formation contains 3 naval ships and another contains 7 naval ships, numbered 1 ∼ 3 and 4 ∼ 10) and 10 civilian ships (numbered 11 ∼ 20) are included. The generated trajectory of all ships is shown in Fig. 7. Other feature data of targets detected by radar are similar as Case 1, such as speed, pulse, and RCS.
Targets formation identification
According to the threshold selecting method, mentioned in Section 3.1, three different thresholds (0.0555, 0.1437, 0.2320) are selected. The formation identification results under different thresholds are shown in Table 8. It can be seen that formation recognition results are consistent with simulation scenario under threshold 1 and threshold 2. However, with the increase of threshold, ships 1 ∼ 10 are identified as a formation under threshold 3. Therefore, a larger threshold is not always better.
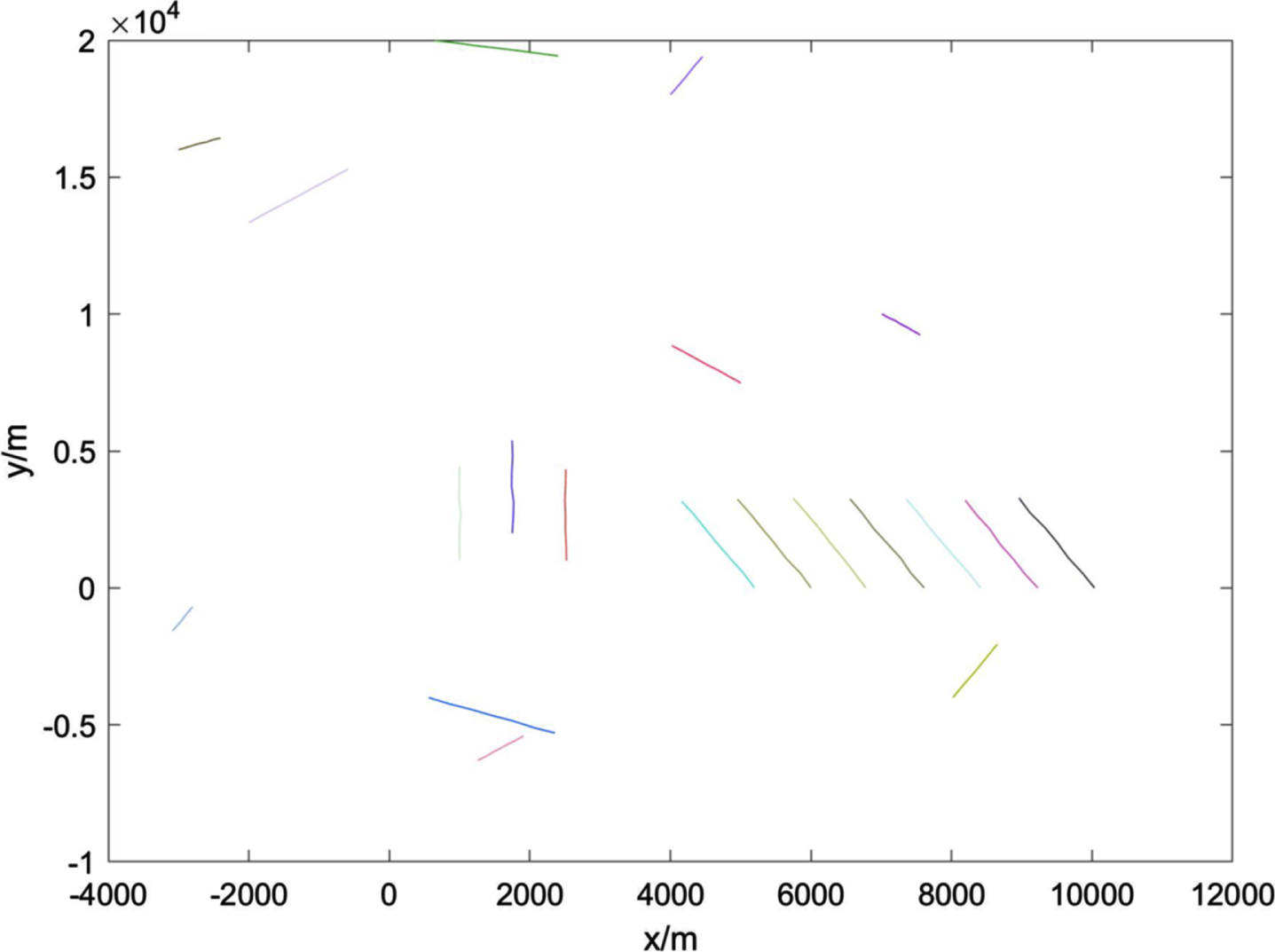
The generated trajectory of all ships in Case 2.
Formation identification results under different thresholds in Case 2
Based on the Bayesian inference, proposed in this paper, the results of targets type recognition are shown in Table 9.
The recognition results of BN in Case 2
The recognition results of BN in Case 2
In Table 9, for ship 1 ∼ 3, the probabilities that being identified as naval ship are the same under threshold 1 and threshold 2. Under the threshold point 3, the probability of being identified as a naval ship increases. This is because ships 1 ∼ 10 are identified as the same formation under threshold 3. According to the CPT, when the number of ships in the formation is greater than 5, the target is more likely to be identified as a naval ship. However, under the threshold point 3, formation identification is not consistent with the simulation scenario, which indicates that a larger threshold is not necessarily better.
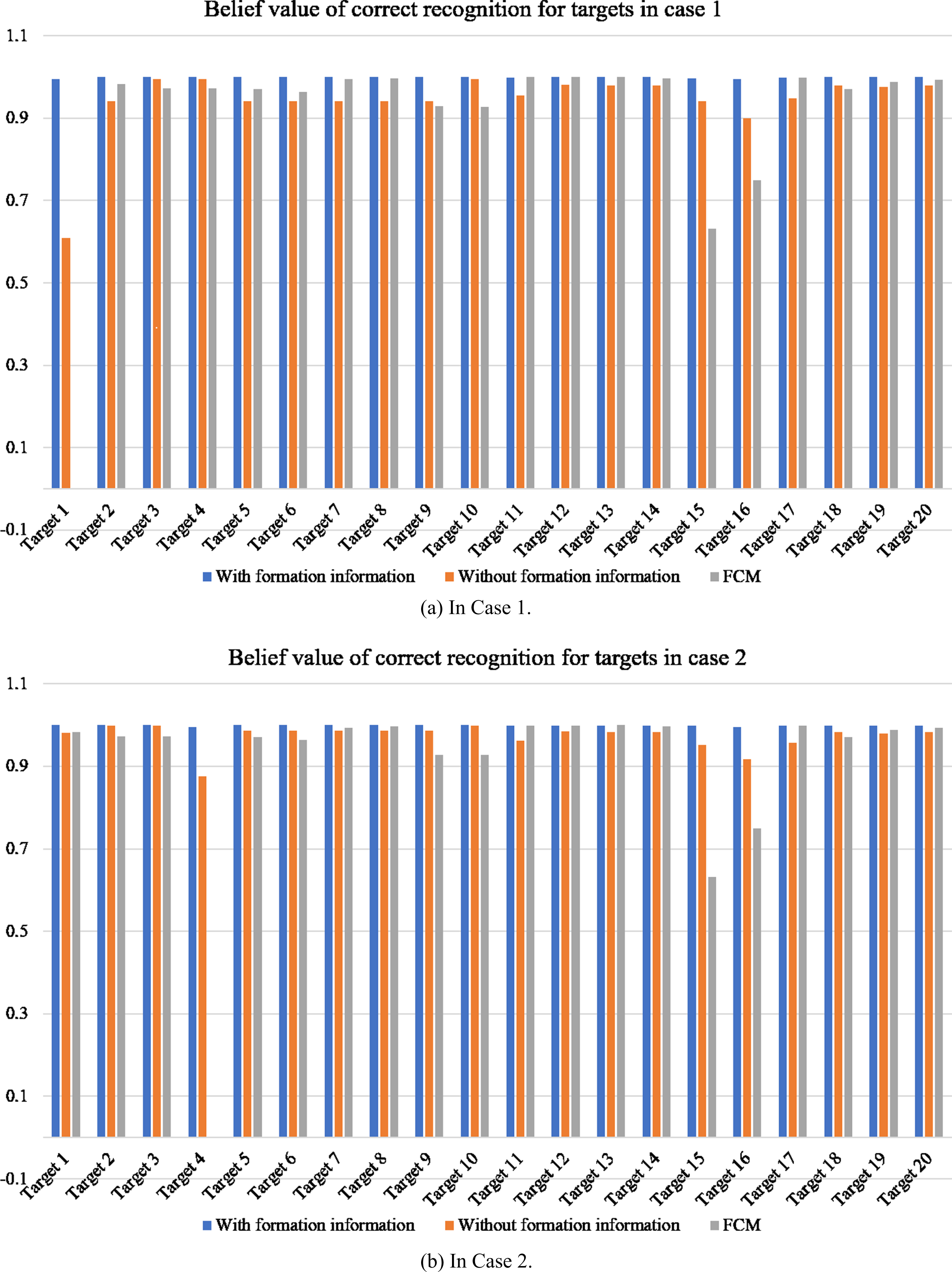
The comparison of fusion results that with/without formation information and FCM algorithm.
The BPAs converted from information sources under different thresholds are drawn in Table 10. Besides, the fusion recognition results of all ships are drawn in Table 11.
The BPAs converted from information sources under different thresholds in Case 2
The BPAs converted from information sources under different thresholds in Case 2
The fusion recognition results in Case 2
As can be seen from Table 11, ship 1 ∼ 10 are recognized as naval ships, while ship 11 ∼ 20 are recognized as civilian ships, which is consistent with the simulation scenario. Besides, compare Table 10 with Table 11, it can be found that the belief value of ships 1 ∼ 10 recognized as naval ships after fusion is greater than that under any threshold value, indicating that the belief value of target recognition is indeed improved after using of Dempster combination rule. Similarly, ships 11 ∼ 20 are recognized as civilian ships with high belief value. This results also show that the proposed method is effective for recognizing types of targets.
We have compared the recognition results with that obtained by the method not including formation information and fuzzy C-means clustering (FCM) algorithm, as shown in Fig. 8.
The recognition results based on the SVM algorithm.
From Fig. 8, we can see that the proposed method achieves better performance in Case 1 and 2. For ships 1 ∼ 10, these targets are recongized as naval ships with higher belief value. Specifically, in Case 1, the ship 1 is rightly recognized as a naval ship with 0.9943 using proposed method. However, the belief value of recognition is 0.6087 without formation information. For ships 11 ∼ 20, although both methods have low belief value of identifying these targets as naval ships, the method in this paper obviously has a lower false recognition rate. Besides, ship 1 in Case 1 is incorrectly recognized, and ship 4 in Case 2 is incorrectly recognized based on the FCM algorithm. Ship 15 is recognized with a probability of 0.6319 in Case 1, which is lower than that of the proposed method.
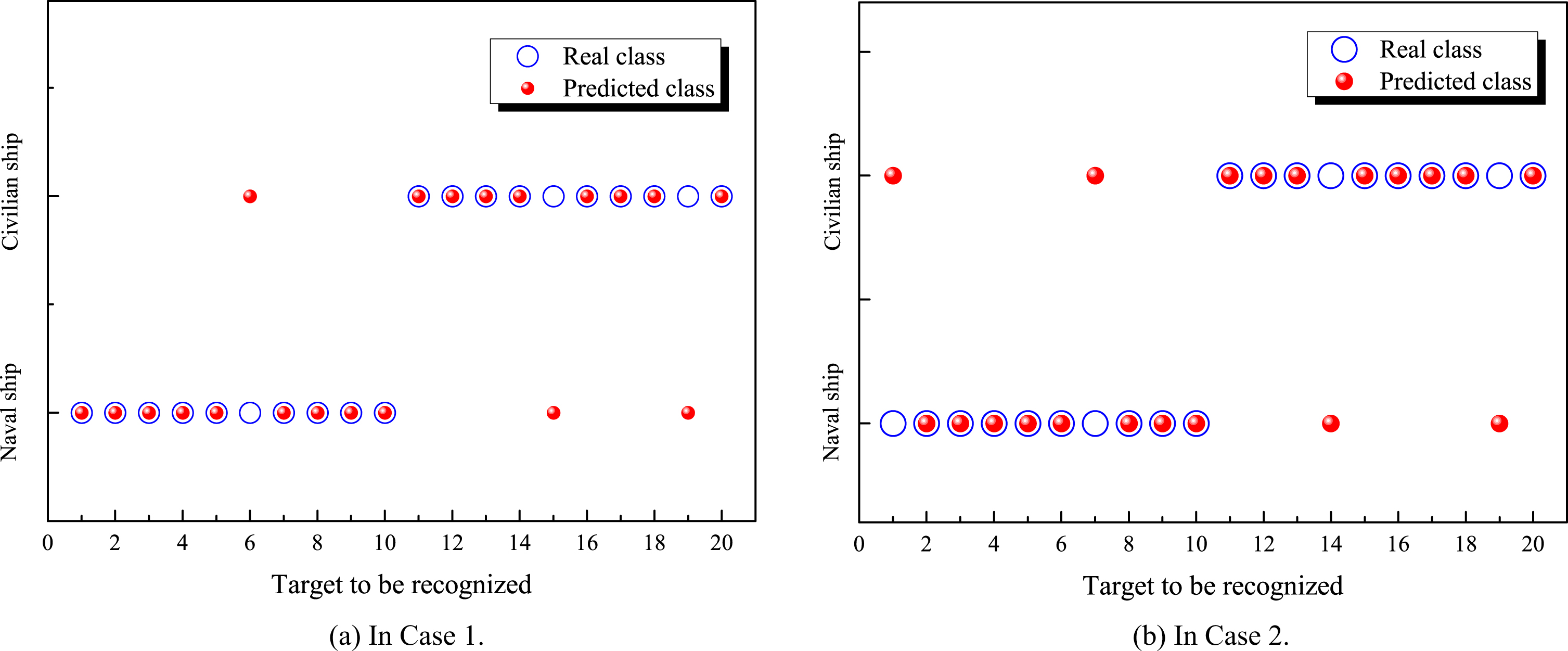
Besides, support vector machine (SVM) algorithm is utilized to recognize the ship target for Case 1 and 2. The results are shown in Fig. 9. As can be seen from Fig. 9, 85% targets are correctly recognized by SVM algorithm in Case 1, ship 6, 15 and 19 are incorrectly recognized in Case 1. Moreover, in Case 2, 80% targets are correctly recognized. Obviously, the proposed method in this paper has superior performance.
In summary, this study comprehensively considered the dynamic, static information, formation information, and feature information to recognize the type of ship target based on DTW algorithm, BN, and D-S evidence theory. The proposed method can effectively recognize ships when there is a deviation in ship feature information. However, it also has some disadvantages. First, we classify the types of ships to two categories, that is, identify the ship as a warship or a civilian ship, but do not recognize its specific type. Second, owing to actual data acquisition difficulties, the simulation data are used to verify the proposed method MSIF-STR. However, the actual environment is very complex, and real data may be required to verify the proposed method.
The STR is greatly related to the battlefield situation awareness. In this paper, a multi-source information fusion method for ship target recognition based on Bayesian inference and evidence theory has been proposed. The focus of this method MSIF-STR is to jointly consider dynamic formation, formation information, and attribute information among ships. First, the dynamic information is used to obtain formation information based on DTW and the difference-vector algorithm. Second, we combine the formation information with attribute information using BN to recognize ship type under different thresholds. The CPTs varies with the number of ships included in formation for the BN. Third, the recognition results under different thresholds are as multi-source to fuse utilizing evidence theory. Final, this method is verified by a simulation cases. The results show that the method MSIF-STR has achieved performance superiority in recognition accuracy, compared with ship recognition method without formation information, FCM and SVM algorithms. The proposed approach MSIF-STR in this paper can be applied not only to ships recognition, but also to areas such as unmanned aerial vehicles (UAVs) recognition. Besides, the recognition of specific naval ships is also very important in military mission. We will further research to realize the recognition of specific naval ship types.
Footnotes
Acknowledgments
This work is supported by National Natural Science Foundation of China (Program No.62173272).