
Abstract
The main contribution of this review work is to show how various control techniques are used to manage the speed of Permanent Magnet Synchronous Motor (PMSM). The PMSM’s are mostly used in electric vehicles, electric traction and high performance industrial drive applications. In this article conventional sensorless techniques are compared with machine learning techniques such as fuzzy logic, artificial neural network and neuro-fuzzy controllers to control the speed of PMSM drive based on vector control approach. The benefits of machine learning techniques used in sensorless PMSM drive are easy to design, less execution time and fast access speed control. The various controlling techniques used in controller along with its complexity, advantages and drawbacks are discussed in this article. The above mentioned controlling techniques are implemented and simulated by using MATLAB R2019b/Simulink software based on sensorless Model Reference Adaptive System (MRAS) with the help of Field Oriented Control (FOC) strategy of PMSM drive. By comparing the all sensorless controlling techniques in simulation study, it is identified that the combination of neuro-fuzzy controller gives the best speed control performance than other controllers.
Introduction
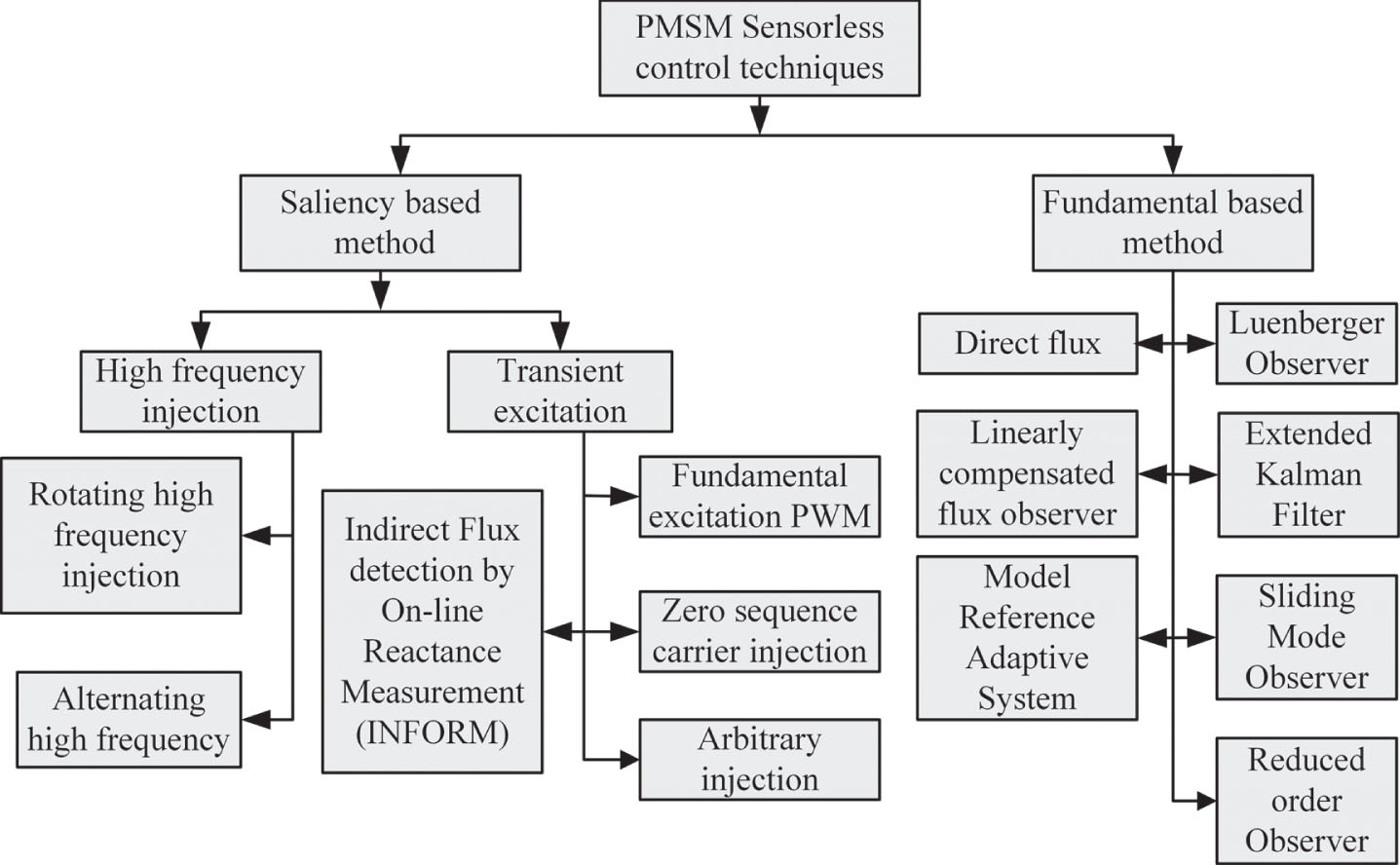
The PMSM possess special characteristics such as high power to weight ratio, high efficiency, small size and low torque ripple. It is mostly used in electric vehicles, electric traction and industrial drive applications over induction, DC and BLDC motors [1]. The Surface mounted PM Synchronous Motors (SPMSM), which is used for low speed and Interior PM Synchronous Motors (IPMSM), used for high speed applications these are two types of PMSM’s. The Direct Torque Control (DTC) and Field Oriented Control (FOC) techniques [2] are shown in Fig. 1, mostly used in many applications. The DTC has better dynamic performance and FOC has good steady state characteristics, low torque ripple with low total harmonic distortion (THD). The Proportional Integral (PI) controller is commonly used to control the current loop [3], Sliding Mode Control (SMC) is designed to control the speed loop and suitable for robustness against parameter variations, uncertainty and chattering phenomena problem is main drawback. Some nonlinear control techniques such as adaptive control [4], Model Predictive Control (MPC) [5], sliding mode based deadbeat predictive current control [6], Proportional Integral and Derivative (PID) controller [7], MRAS, Extended Kalman Filter (EKF), low and high frequency injection, neuro-fuzzy controller [8], mostly used to control the speed of PMSM drive. The flux weakening operation goal is to generate the correct current command signals, voltage feed forward and feedback mechanism based on the machine model [9].
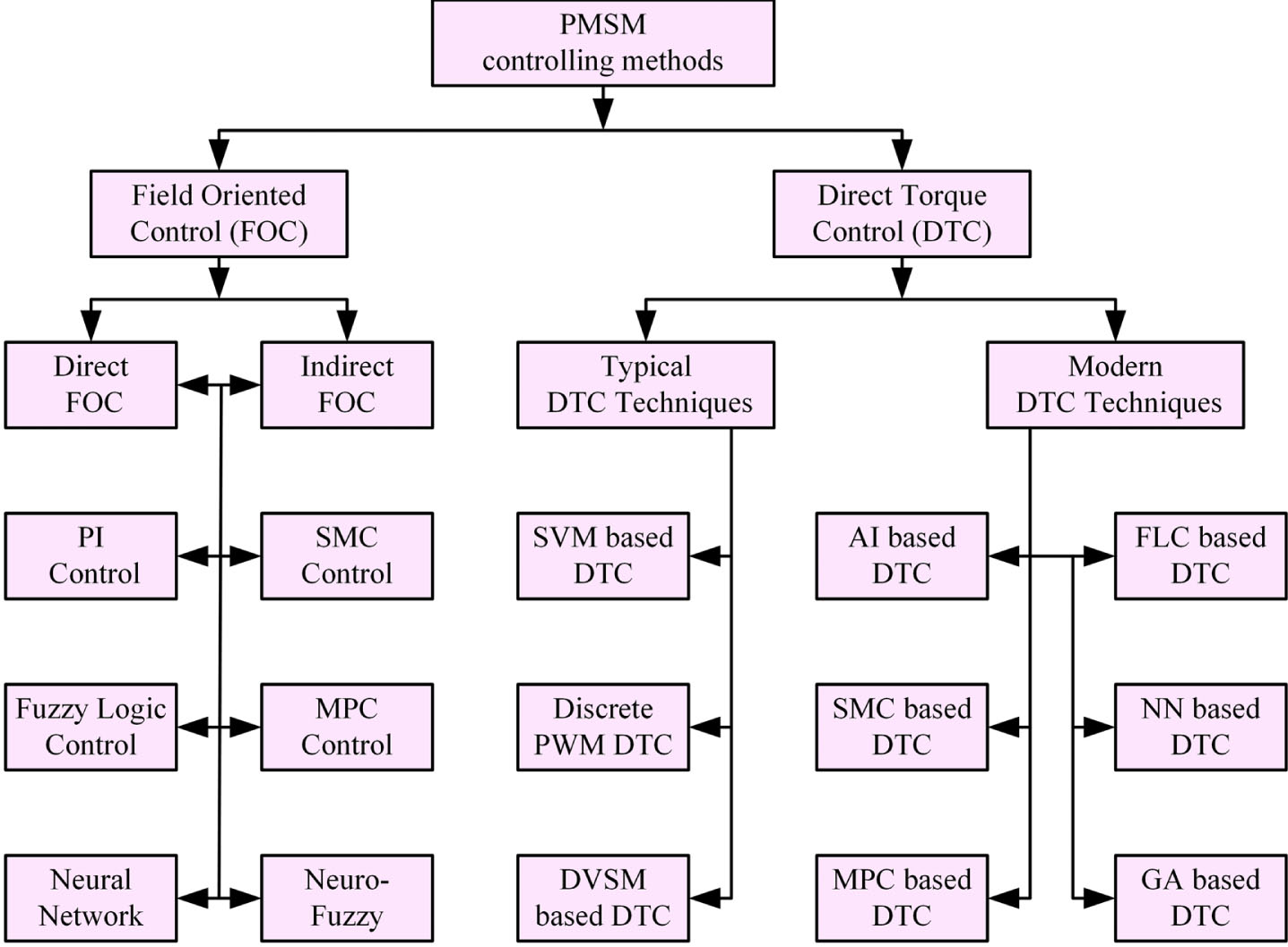
Controlling methods of PMSM drive.
To increase the performance of controller and PMSM drive, Artificial Intelligence (AI) and Fuzzy Logic Controllers (FLC) are applied. The disadvantages of FLC are lack of systematic approach, no system specific model and also complexity because of more mathematics involved in it. It is possible to have robustness against parameter alterations and disturbance effect due to nonlinear operations. The PI regulator with FLC structure [10], to optimize the parameters of PID controller with Genetic Algorithm (GA) and Artificial Neural Networks (ANN) are used [11]. The performance and complexity problems of PMSM drive improves with the help of modified Particle Swarm Optimization (PSO) based PID, Gradient Boosting Decision Tree (GBDT) algorithm with Wing suit Flying Search (WFS) optimization PID speed controller [12]. The neuro-fuzzy is an intelligent, simple and efficient rapid controller to control the speed of PMSM drive. Takagi-Sugeno-Kang (TSK) is the best and most powerful multi-model Fuzzy Inference System (FIS) for nonlinear dynamic modeling. An Adaptive Neuro Fuzzy Inference System (ANFIS) is used for modeling, prediction, regression and control purposes. In this article, PMSM drive speed is controlled based on sensorless vector control approach by comparing traditional sensorless MRAS technique with machine learning techniques such as fuzzy logic, neural network and neuro-fuzzy controllers. The machine learning techniques has the advantages which are robust, less executing time and quick access data than traditional controllers. For hardware implementation digital signal processor (DSP), Field Programmable Gate Array (FPGA) processors are used. The work in this paper is divided into six sections of which section 1 gives the introduction, section 2 describes mathematical modeling of PMSM drive. A brief overview of controlling methods explained in section 3. In section 4 discussed the controlling methods and algorithms. The MATLAB/Simulink results and discussions are discussed in section 5. The conclusion and future scopes are included in section 6.
PMSM stator windings are positioned in space by 90° electrical angles with rotor winding θr from stator d-axis winding. The q-axis is expected to lead counter clockwise rotation of rotor via d-axis [13]. The total stator voltage and derivative of flux connections in stator windings expressed as Equations (1) and (2).
Multiple control algorithms are used to track the rotor position, speed and torque control of PMSM drive based on DTC and FOC precise methods for measuring stator parameters. The disadvantages of sensor based methods are circuit complexity, high maintenance cost and loud noise. Due to these factors the overall performance of system is reduced. The disadvantages of sensor based system have been overcome by conventional sensorless techniques like EKF, SMC and MRAS etc. The MPC predicts the current and flux values which reduces time and cost functions while maximizing the system performance. To minimize the cost function, it compares the reference speed (ωref) with measured speed (ωm) and provides error to PI controller as shown in Fig. 2. The PI controller output is divided into torque reference (Tref) and flux reference (ψref) quantities. These signals are directly sent to MPC, which comprises of cost function minimization, flux & torque prediction and flux & torque estimation blocks. The pulses from SVPWM are provided to VSI, which drives the PMSM [14].
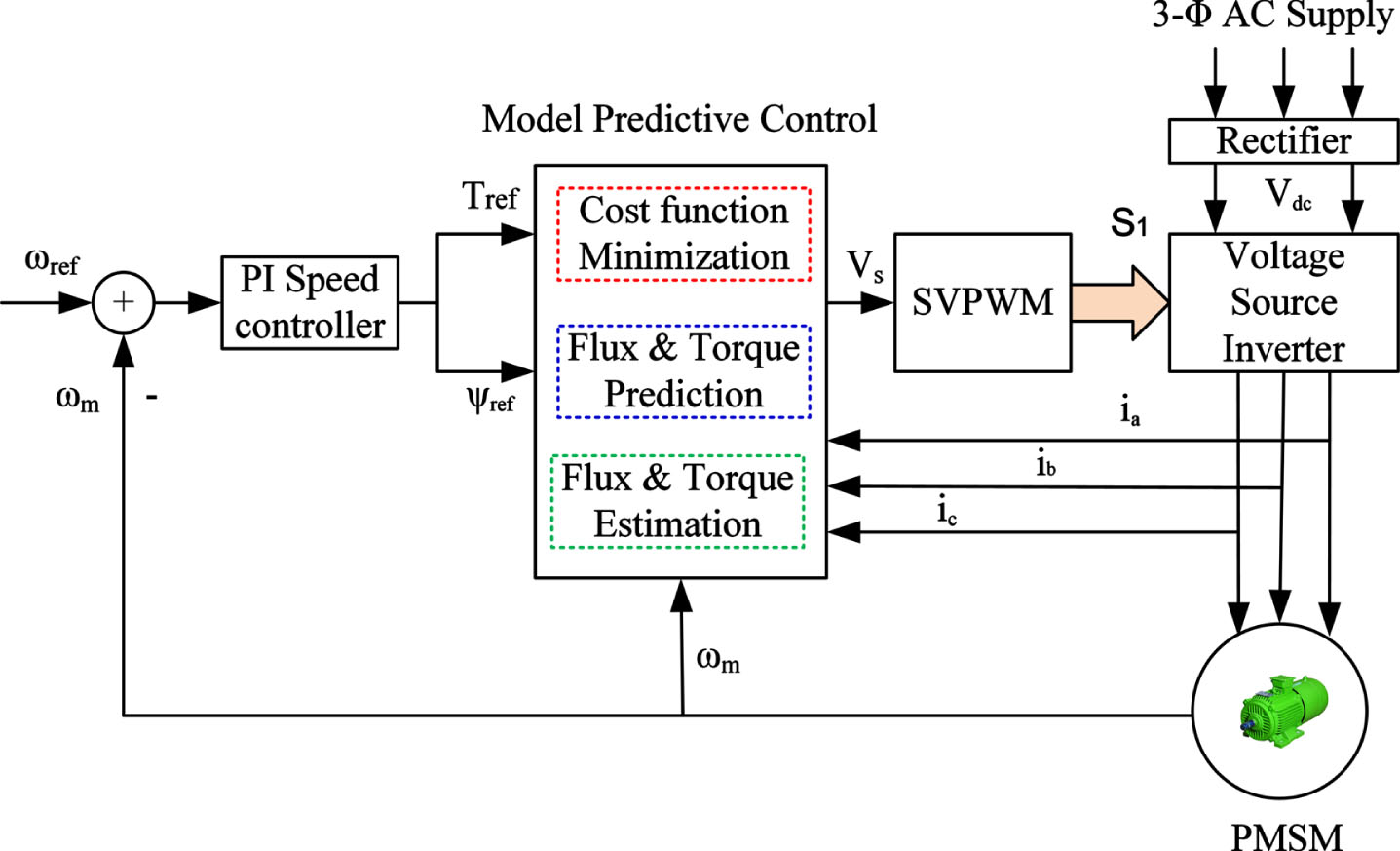
Block diagram of model predictive control.
An EKF is shown in Fig. 3, one of the promising sensorless observers used to achieve precise estimation of rotor speed from d, q-axis currents under noisy measurement. The speed error is reduced by selecting the proper gains of PI controller (Kp, Ki) using Nichols-Ziegler technique, improves settling time and reliability of the system. If the system noise covariance is known, EKF offers best noise filtering for measurements. If the rotor speed is considered as an extended state, it is incorporated in to dynamic model of PMSM. Then EKF is used to linearize the nonlinear for each new value of estimation [15]. MRAS method is used to estimate the rotor position and speed of PMSM drive by considering error based on reference, actual speeds and d, q reference model. The rotor position and speed are estimated by reducing error between derivatives of d, q-axis currents and reference values. This technique reduces the chattering of PMSM drive which is a drawback of SMC, but it gives good and accurate speed tracking performance of the system [16].

Extended kalman filter control.
FOC is a sensor based linear vector control technique in which hall and encoder sensors are used to know the rotor position of PMSM drive and it provides position feedback to the controller. It is mostly employed in industrial and high performance drive applications to achieve the decoupled control of torque and flux. This approach was first introduced to control induction motors and expanded to control PMSM. In this FOC, it comprises of one outer speed loop and two inner current loops to control the flux and torque by using d, q-axis currents respectively. The d-axis reference current is set to zero in PI controller, idref =0 is indicated in Fig. 4. In this case PMSM behaves as separately excited dc motor, which results improve the steady state characteristics and low torque ripple. The electromagnetic torque developed by machine is represented by Equation (10) and it dependent on q-axis current component.
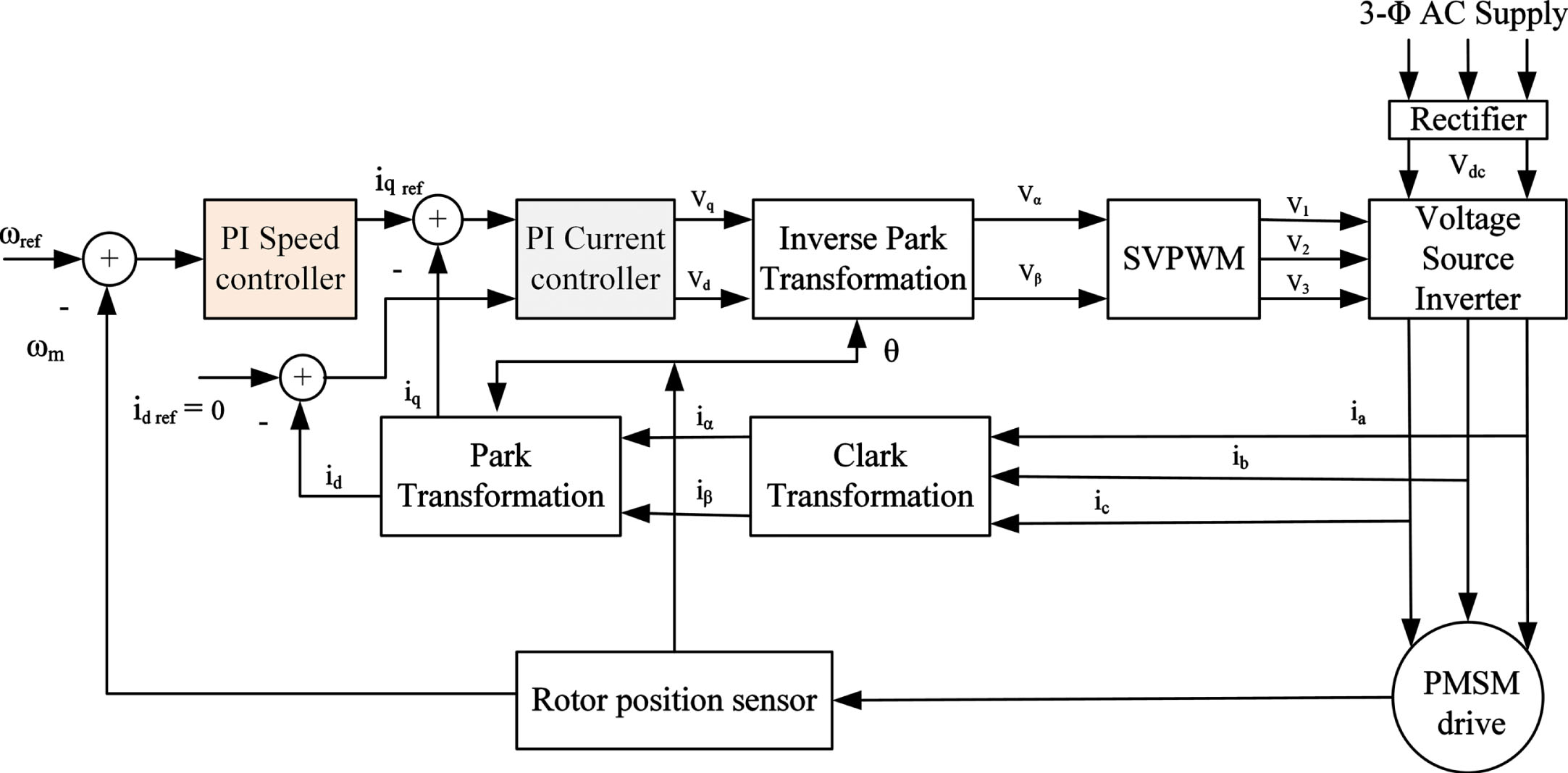
Field oriented control of PMSM drive.
The DTC technique is a nonlinear control strategy shown in Fig. 5. That chooses a voltage vector based on the difference between reference and measured values of flux and torque without external requirements of sensors. By using hysteresis controller look up table the reference torque and flux values are determined. This technique has the advantage of not requiring coordinate transformation and d, q-axis current controllers.

Direct torque control of PMSM drive.
The position sensor is used to control the torque with less parameter dependency and provides fast dynamic characteristics of the motor. This method has the limitation error in estimating stator flux due to variations in stator resistance. Equation (11) is used to compute the stator flux linkage by integrating the difference between input and voltage drop across the resistance.
The voltage vectors in DTC scheme is separated into six sectors each can be divided into two equal parts. These six nonzero and zero voltage vectors are shown in Fig. 6. All the possibilities of voltage vectors are tabulated in Table 1, where τ is the response of torque hysteresis comparator; output of flux hysteresis comparator is denoted by Φ and θ represents flux linkage output sector. A three level hysteresis comparator is employed with τ=1 denotes measured value below reference value, τ=-1 denotes measured value above reference value. A two level hysteresis comparator is used to measure the flux, Φ = 1 denotes the measured value below reference value and Φ = 0 denotes actual value above the reference value [17]. The difference between FOC and DTC techniques has been listed in Table 2. Depending on the application requirements FOC is more convenient than DTC or vice versa.
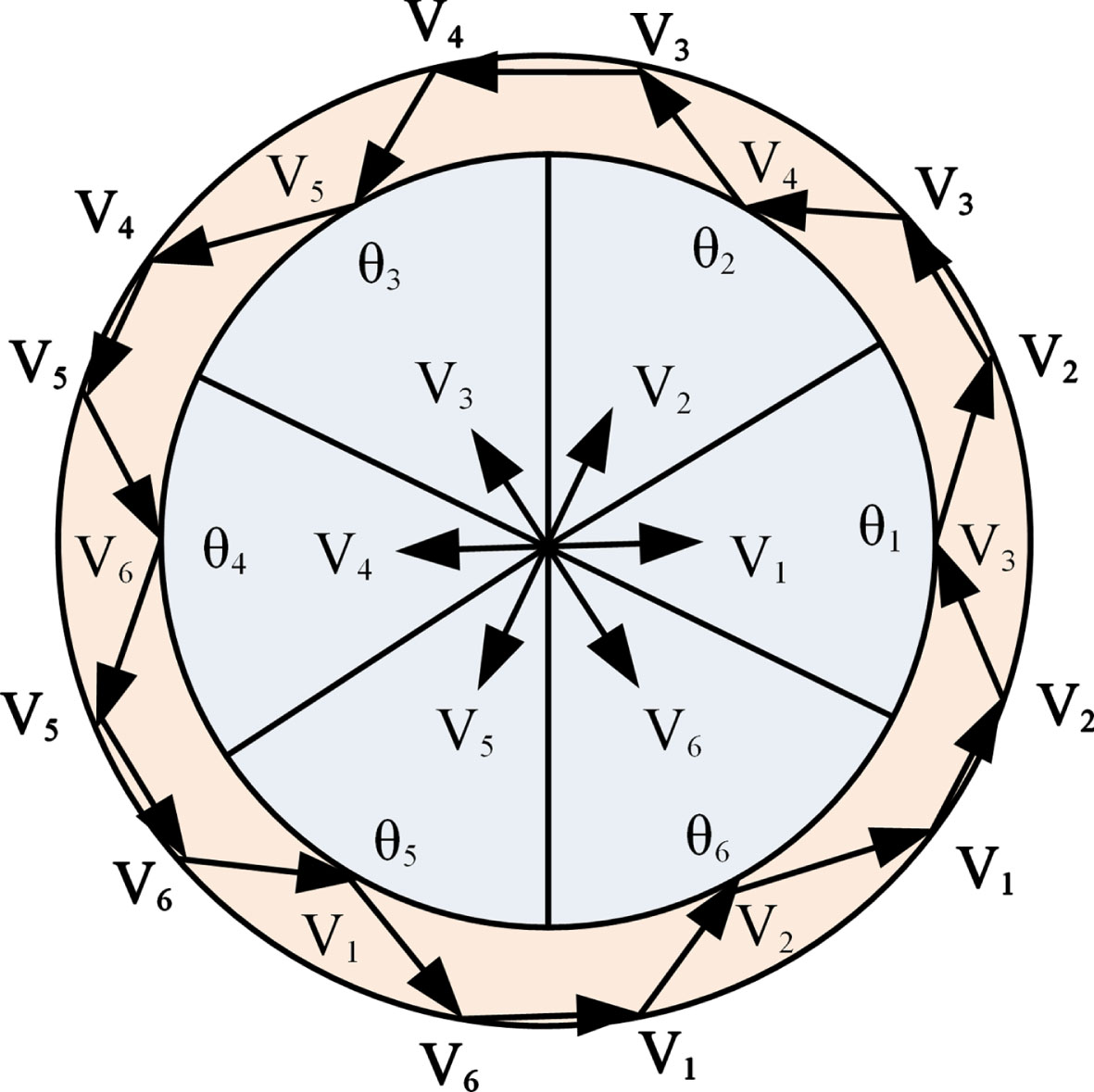
Voltage vectors of direct torque control.
Switching table of direct torque control
Difference between FOC and DTC techniques
Sensorless field oriented control
The hall and encoder sensors are used to estimate the rotor position, which results the machine becomes heavier, complexity, high cost and low system performance. To overcome these drawbacks sensorless techniques have been used. The different types of sensorless techniques and its equivalent block diagrams shown in Figs. 7 and 8. The SMC is a popular sensorless technique used in high power industrial drive applications to control the speed of PMSM [18]. The back-EMF of PMSM is estimated by using a Discrete Time Super Twisting Algorithm (DTSTA) based on SMC. The back-EMF will helpful to estimate the speed of motor. The gains from DTSTA vary over time in order to overcome the chattering problem of SMC [19]. The Feed Forward Voltage Estimation (FFVE) with Phase Locked Loop (PLL) speed estimation technique is introduced to control the speed of PMSM drive. The shortcoming of this method is parameter variation and this is reduced by MRAS with FFVE approach from low to high speed range under full load [20]. The benefits of MRAS, FFVE techniques are easy to design and unburdening of micro controller processor. To track the speed of PMSM drive, sensorless SMC is presented [21]. The SMC is used to estimate the rotor initial angular position and online motor parameters by using a set of polynomial equations produced from output of electrical system without determining rotor velocity and position. A high frequency pulsating sinusoidal voltage is injected into d, q-rotating reference frame in order to overcome the problem of filtering effect on bandwidth [22]. The rotor position information is obtained from the response of injected high frequency current signal into stationary d, q- reference frame other than rotating d, q- reference frame. This is modulates high frequency current signal directly and passes through low pass filter to estimate an angle of rotor position. A rotor flux control observer is used for PMSM speed control to guarantee the efficient performance from low to high speed zones without injecting voltage into rotor flux [23]. The proposed technique is overcome the disadvantage of high frequency voltage injection causing the power losses in the system.
Different types of sensorless control techniques.
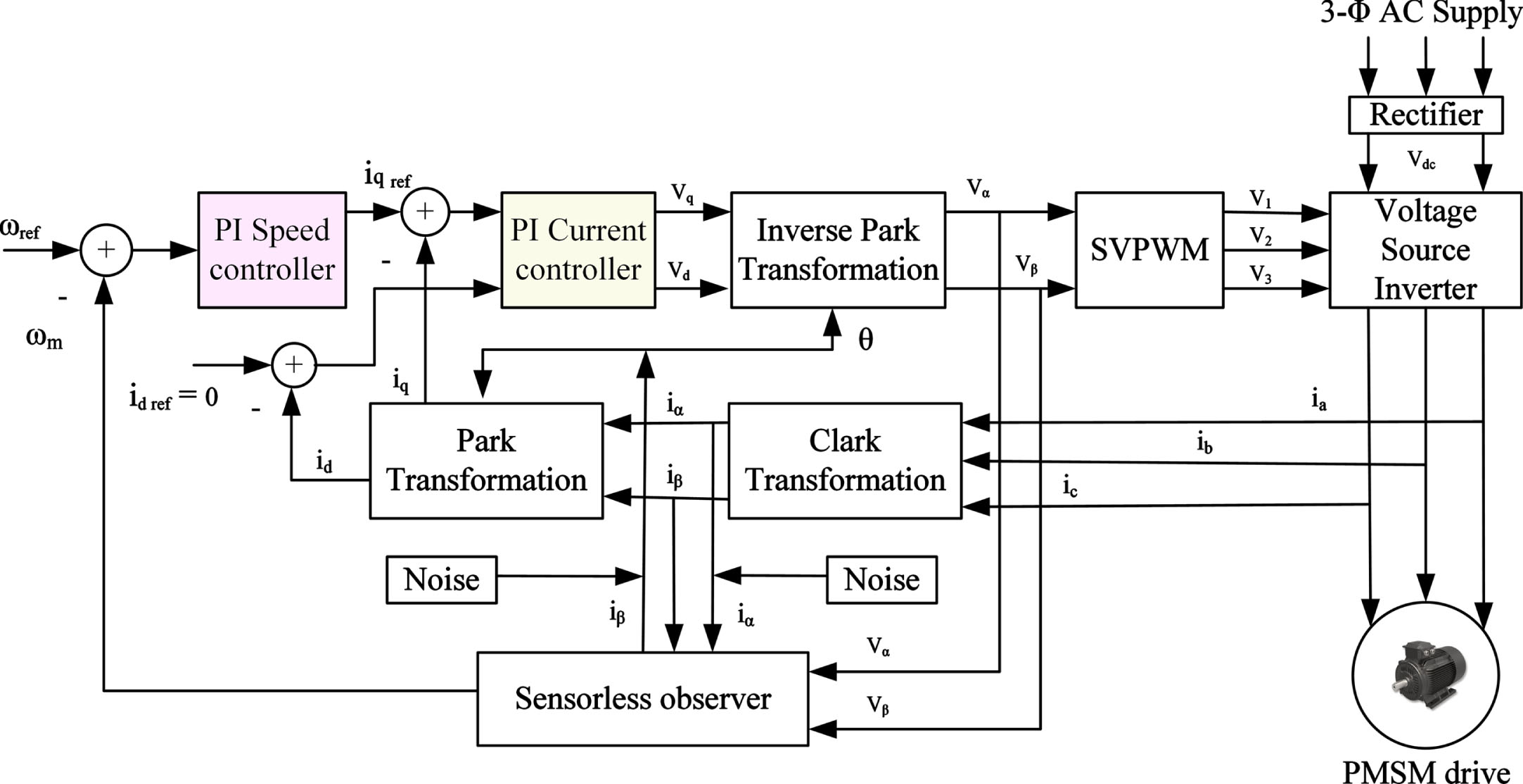
Sensorless PMSM field oriented control.
A sensorless high speed PMSM drive with an adaptive quadrature phase locked loop (AQPLL) observer is proposed for better dynamic performance of the system [24]. An anti-disturbance performance and phase delay of traditional QPLL operates with fixed bandwidth frequency and tradeoff of this. This tradeoff is overcome by AQPLL, which operates at low bandwidth and sufficient to accelerate the motor. AQPLL is automatically tuning the bandwidth when motor dynamics are unknown. A combined Disturbance Observer (DO) with SMC is designed to control the speed of PMSM. An Integral State Feedback Controller (ISFC) is implemented to generates an input parameters, which helpful to estimate and mitigate speed ripple problem [25]. The SMC, ISFC approaches are used to estimate the speed and DO is used to evaluate load torque disturbance. The suggested ISFC is easy to design than PI controller. On the basis of an information theory, entropy concept is implemented to control the speed of PMSM. It consists of two parts one is rotor state estimation by using the parallel reduced order EKF and second one is without altering PI controller, a parallel reduced order EKF is added to closed loop [26]. The parallel reduced order EKF is adopted to track the speed and improves system performance in closed loop. Additionally, taking into an account FPGA has great durability, low energy usage, parallel and quick process.
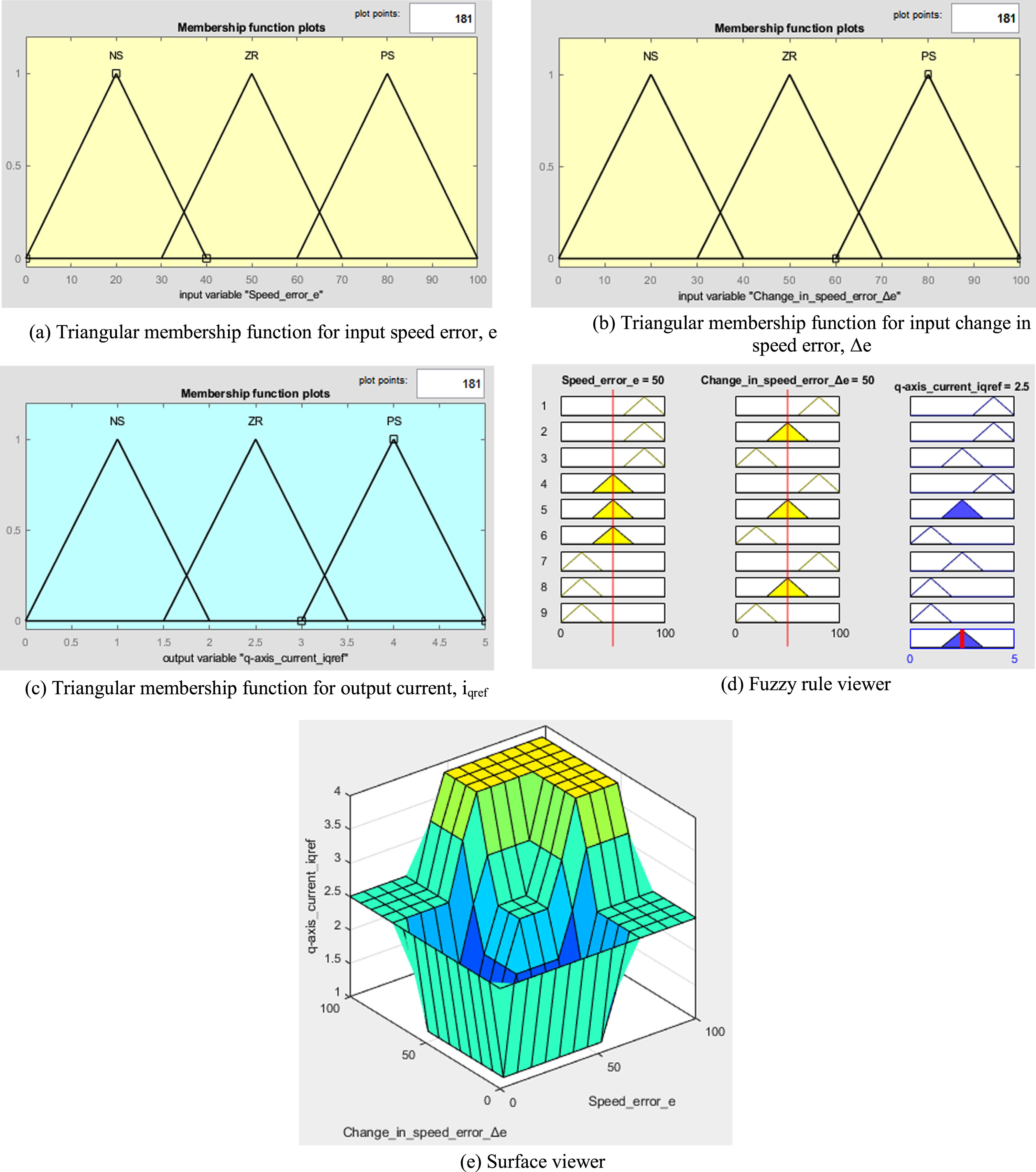
Fuzzy logic control (FLC) is a heuristic technique, includes the knowledge and human thought into nonlinear controller design. The nonlinear problems are easily handled by using fuzzy rules with qualitative and heuristic techniques, compared to standard techniques. Fig. 9, shows fuzzy logic controller based on sensorless FOC of PMSM. It consists of fuzzifications, which assign crisp input data in to fuzzy membership function (MF) range from 0 to 1. The linguistic variables are Positive Small (PS), Zero (ZR) and Negative Small (NS). The inputs speed error e and change in speed error Δe gives output q-axis current iqref. The input, output triangular MFs, rule base and surface viewers are shown in Fig. 10. The fuzzy inference and rule base systems are used for mapping the input output variables. The Mamdani and Sugeno models are taken; IF-THEN rule base system is used in Fuzzy Inference System (FIS). It is in general form “IF X is Y, THEN A is B’’, where A, B are fuzzy sets. Here, nine fuzzy rule base combinations are listed in Table 3. The defuzzification processes the fuzzy variables to crisp values. The Center of Sums, Center of gravity, Center of Area, Weighted Average and Maxima methods are used to get the desired output [27].
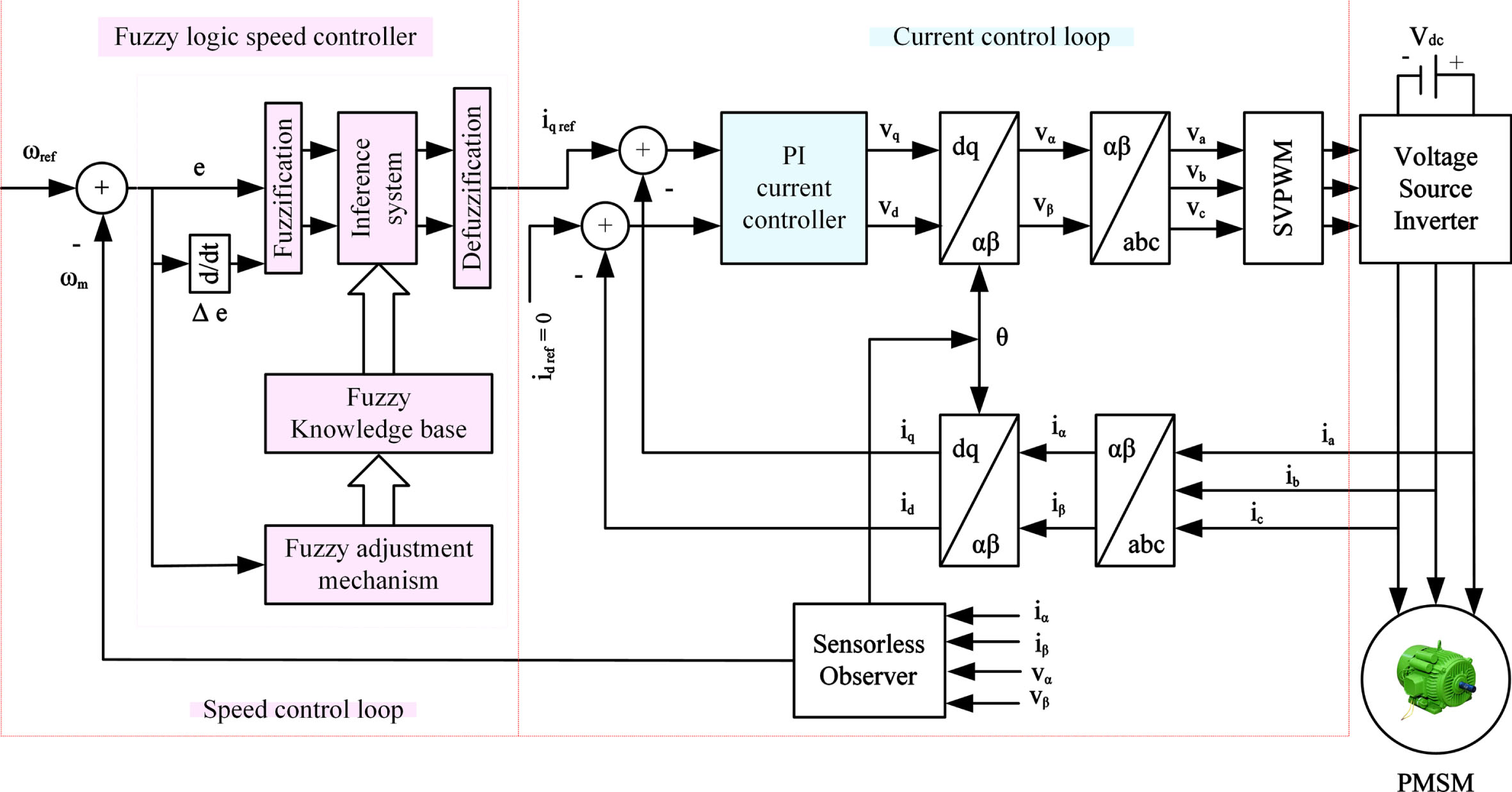
Fuzzy logic based sensorless FOC of PMSM drive.
Design of fuzzy logic controller.
The different fuzzy logic control algorithms are explained in this section to control the speed of PMSM dive. The sensorless SMC and MRAS techniques are mostly used to estimate the rotor position and speed. To enhance the system response by using fuzzy logic, ANN and neuro-fuzzy controllers are adaptive against nonlinearity. To estimate the rotor position and speed of PMSM, fuzzy logic controller is developed with MRAS on MATLAB R2019b /Simulink software. Compared to traditional SMC and MRAS, FLC is more suitable to estimate the rotor position and adjust if any parameters change in real time [28]. An intelligent FLC is proposed to control the speed of PMSM drive. A generalized predictive control with nonlinear identification is also used to increase the effectiveness of the system. The stabilization and intelligent controllers are separable. The input from conventional control is used for stabilization and feed forward is incorporated into intelligent control to handle uncertainties in load torque. The disturbance observer (DO) is used instead of straightforward intelligent FLC and also reduces speed overshoot. The DO is not sensitive to load torque uncertainty [29]. To control the speed and torque of PMSM, it requires an accurate rotor position not possible even with incremental and resolver sensors in it. The majority of control algorithms employ machine parameters such that torque constant, stator inductances and resistance used for predicting the rotor position and speed. An enhanced ANFIS based MRAS observer is proposed and compared with conventional MRAS, the suggested ANFIS controller deals the nonlinearity and enhance the system speed performance [30].
The different types of traction motors impairment is improved by using FLC with control mechanism. The PMSM is fed with treadmill; treadmill speed is set by therapist even better training results will not be attained with conventional controllers. The shortest feasible rope swing angle is ensured by proposed fuzzy logic speed controller. The treadmill system has a servo drive with PMSM, the advantages are energy recovery module, allowing for smooth speed control operation, reducing acceleration and energy saving [31, 32]. A fuzzy evolutionary PID controller is proposed for speed control of PMSM drive. A fuzzy-PID controller is designed based on the problem when transient error is large. To obtain the better transient response by increasing Kp, Ki and decreasing Kd gains of PID controller. The fuzzy-PID controller settings are automatically tuned by using an evolutionary algorithm (EA). The suggested EA based fuzzy-PID tested on texas instruments TMS320F28335 floating point DSP controller in real time. It is demonstrated that the effectiveness of suggested intelligent digital control system under rapid load torque fluctuations [33]. Due to nonlinear friction and time varying loads, PMSM servo system difficult to achieve an exact rotor position. A disturbance observer (DO) based compensating control approach is suggested to address the aforementioned problem. In order to estimate an innate friction, an adaptive interval type-2 Takagi-Sugeno-Kang (TSK) FLC is used. The composite adaptive updating rule is created to enhance the rotor tracking performance by using tracking and modeling error. A traditional cascade controllers are used to estimate the friction and DO is used as compensation terms. Based on lyapunov theory the suggested controller ensures tracking error uniformly finally confined [34].
Fuzzy rule base system
Neural network controller is most popular approximation algorithm used to regulate the speed of PMSM drive. It gives an effective optimization and control capabilities. Figure 11 shows a simple neural network controller which consists of input, output layers and hidden layer is connected in between input, output layers. The layers of neuron in human brain form a network that connects nodes. In this part, some neural network techniques are listed to control the speed of PMSM drive.
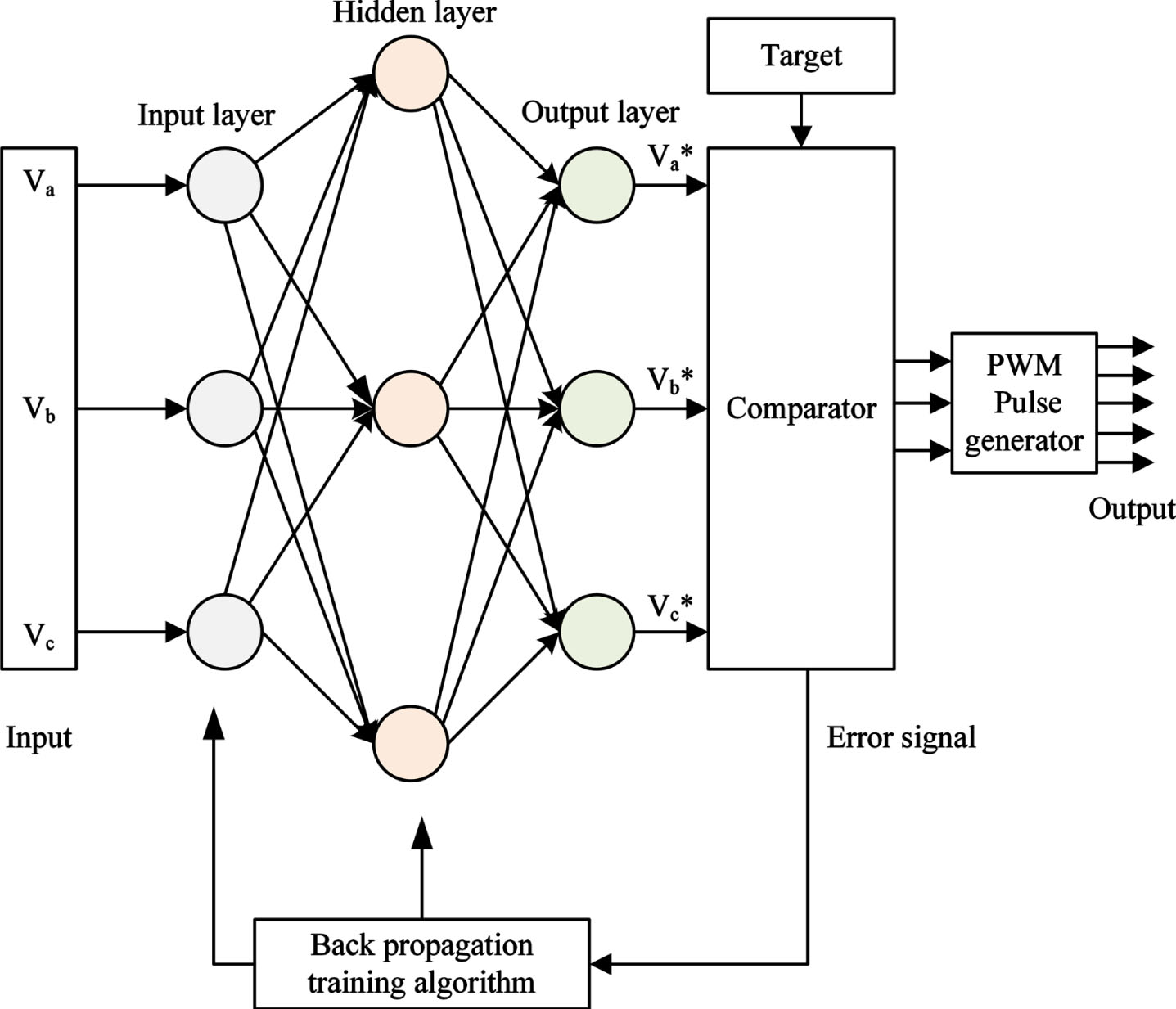
Architecture of neural network controller.
To track and identify the rotor position in FOC of PMSM, a combined radial basis function (RBF) and fast terminal sliding mode (FTSM) controlling technique is developed. The proposed technique not only corrects network approximation problem and also addresses the issue of FTSM. It is simple to implement and enhances the performance of drive in terms of tracking precision, robustness and fast response time compared to conventional controllers [35]. An innovative Adaptive Decoupling Control based on Radial Basis Function Neural Network (ADEC-RBFNN) is developed to identify the rotor position. A novel ADEC provides asymptotically stable according to lyapunov stability theory. In order to enhance the speed and torque performance of closed loop control system of PMSM with effect of dynamic coupling and back-EMF estimation. To attain the system best performance, RBFNN is used to optimize an ADEC parameters while taking into account, which deals with uncertainty and parameters variation of both PMSM drive and ADEC techniques [36].
A combination of an EKF and ANN based rotor position estimator is developed for sensorless PMSM. EKF is a rotor position estimator, uses signals from noisy environment. To deal an impact of system dynamic uncertainty and external load disturbance, speed control loop ANN is equipped with Radial Basis Function Neural Network (RBFNN) and parameter adjustable mechanism. The estimated values are fed back into current control loop in FOC and RBFNN based self-tuning PI controller is used to control the speed loop [37]. In sensorless PMSM drive, a novel Port Controlled Hamiltonian Back Stepping (PCHBS) control structure with online tuned parameters used. It is conjunction with modified Stator Current Model Reference Adaptive System (SCMRAS) based on speed and flux estimators using ANN and SMC. In order to achieve the good static and dynamic performance of drive in wide speed range, a combined PCHBS controller with speed estimator is developed. This combination compensates uncertainties caused by machine parameter variations, measurement errors and external load disturbances [38]. For high speed control of PMSM drive, an Optimal Adaptive Gains Super Twisting Sliding Mode Control (OAG-STSMC) is implemented. The chattering phenomenon of conventional SMC is reduced by using STSMC. The direct heuristic dynamic programming (HDP) is used for best tuning of STSMC in order to improve the performance of standard super twisting approach by avoiding the disturbance as well as uncertainties to achieve the system robustness. As a result, an online actor critic method with HDP is developed to solve the Hamilton-Jacobi-Bellman (HJB) equation easy way in online by using critic neural network. The proposed OAG-STSMC control method achieves the better dynamic performance regardless of additional unknown uncertainties of PMSM drive [39].
Neuro-fuzzy controller it is the combination of neural network and fuzzy logic controllers. The architecture and different controlling algorithms are shown in Figs. 12 and 13. The best example of this controller is an Adaptive Neuro Fuzzy Inference System (ANFIS), designed using least square and Back Propagation (BP) algorithms. An ANFIS controller has the ability to learn and become an expert in comparison to fuzzy and neural network controllers. In case of sensorless PMSM drive, rotor position estimator is necessary to control the speed of drive. The FLC, ANN and ANFIS controllers along with conventional SMC and MRAS algorithms used to estimate the rotor position because these are adaptive in nature. To estimate the rotor position and speed control of PMSM drive by using fuzzy logic controller is designed based on sensorless MRAS. In contrast to traditional SMC and MRAS, the suggested fuzzy logic controller is an adaptive allowing estimator to adjust if any parameters change in real time [40]. To control the speed and produced torque of PMSM drive, it requires an accurate rotor position detector. In sensorless PMSM, a dynamic modeling control technique is used to estimate the rotor position and speed control purpose. For predicting the rotor position and speed, sensorless control algorithms are employed with machine parameters such that constant load torque, stator inductance and resistance. The neuro-fuzzy based MRAS observer is proposed and compared with conventional MRAS, it is suggested that proposed method gives better performance [41]. An adaptation concept is to take place of PI controller employed in MRAS speed estimation. The two fuzzy logic controllers with adaption scheme are introduced.

Neuro-fuzzy control architecture.
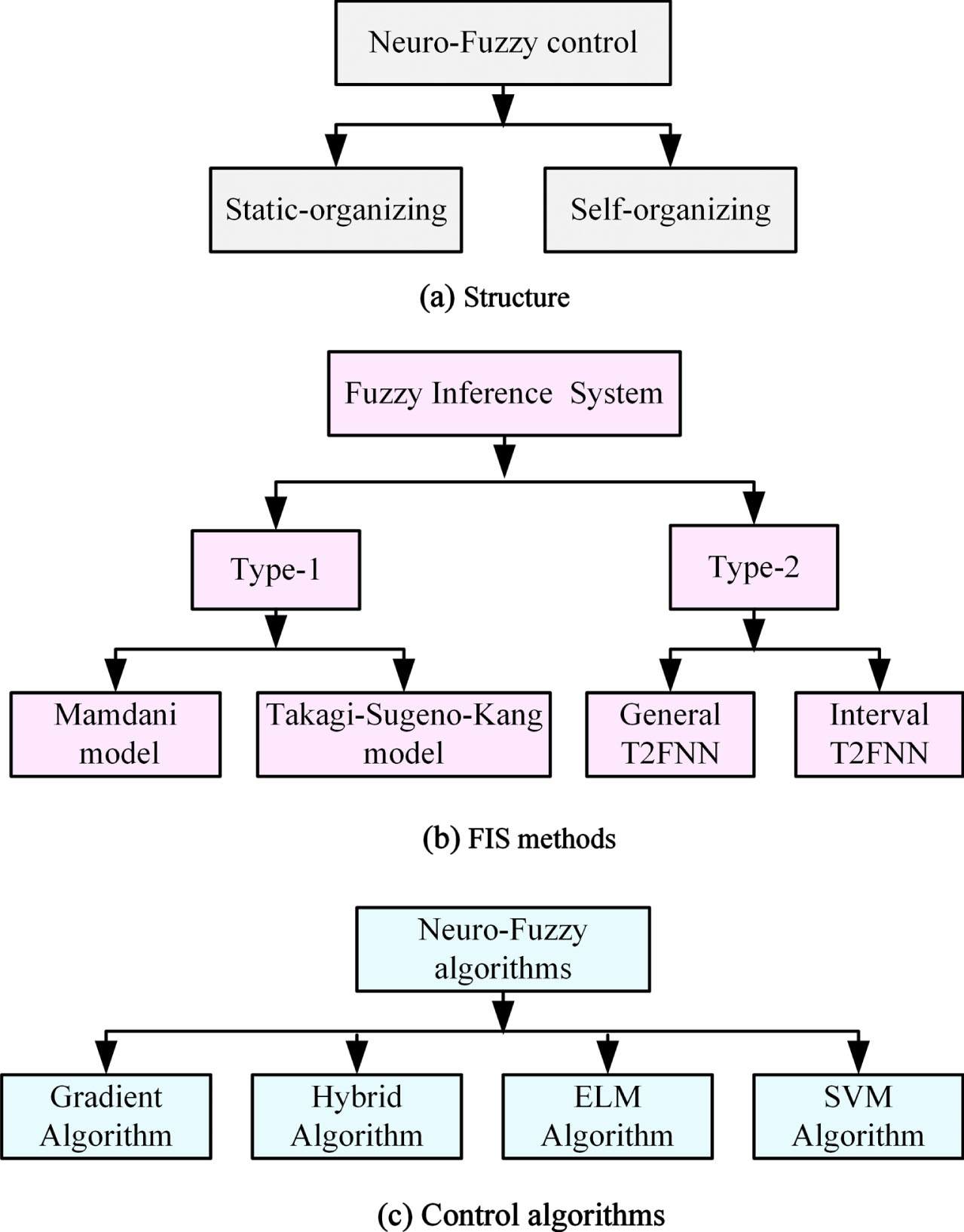
Classification of neuro-fuzzy controller.
The number of control variables rises in tandem with number of rules in conventional fuzzy logic system response time is negatively impacted by this. For a linear function of system variables, this unique design was derived to minimize the number of rules. In this manner system response time increased compared to PI controller, it shows less oscillations, higher forecast accuracy and faster speed tracking [42]. To improve the PMSM drive speed resiliency and tracking capabilities, an Extreme Learning Machine (ELM) based Field Oriented Feedback Linearization Control (ELM-FOFLC) is suggested. The FOFLC is designed to control the torque, flux and speed control loops respectively and eliminate nonlinearities in each control loop. Particularly an ELM is developed based on analysis of characteristics and uncertainties of PMSM with FOFLC. The lyapunov stability theorem is demonstrated that the implemented controller is resilient to different uncertainties with superior [43]. An ANFIS is the most effectively developed controller to control the speed of PMSM. It is an adaptive to handling uncertainties, the suggested model is effective controller compared with existing models including PID and SMCPID controllers. The proposed adaptive neuro-fuzzy has outcomes uncertainties, which give good transient efficiency, quick settling time, less overshoot and zero steady state error than SMCPID controller [44].
The fuzzy logic, neural network and neuro-fuzzy controllers are implemented and simulated by using MATLAB R2019b/Simulink software. The experimental environment is variable-step solver selection and ode23tb (stiff/TR-BDF2) solver based on sensorless MRAS and field oriented control technique of PMSM drive. The MATLAB R2019b/Simulation results of this shown in Fig. 14. In this MATLAB/Simulink work the PMSM drive specifications are listed in Table 4. The simulation results of Fig. 14 (a), shows three phase current drawn by the motor. Initially motor draws low current of 10 A up to 0.08 sec due its low speed and after 0.1 sec motor draws its full load current of 20 A. Figure 14 (b), shows line voltage of PMSM drive is about 48 V. Figure 14 (c), indicates an electromagnetic torque produced by the machine is 3.2 N-m and it is stabilized after 0.17 sec once the motor reaches to its rated speed. The speed is compared between conventional MRAS, fuzzy logic, neural network and neuro-fuzzy controllers are shown in the simulation study. The simulation results demonstrate that machine learning control technique has better speed response in transient state than conventional sensorless MRAS technique.

MATLAB/Simulink results of PMSM based on sensorless MRAS.
MATLAB/Simulink specifications of PMSM drive
Figure 14(d), shows the comparative speed response of MRAS, fuzzy logic, neural network and neuro- fuzzy controllers. The MRAS speed response takes delay time of 0.015 sec, rise time taken to raise the speed response is 0.019 sec. It reaches 2300 rpm maximum speed at peak time of 0.125 sec with reference speed of 2500 rpm. It gives the stable response at settling time of 1.75 sec. In case of fuzzy logic controller, the speed response starts at delay time of 0.018 sec and its rise time is 0.020 sec. The FLC reaches maximum speed response 2350 rpm with reduced overshoot of 20% at 0.130 sec peak time. The speed response is stabilized at settling time of 1.5 sec. The neural network controller has the delay, rise, peak and settling times are 0.020 sec, 0.025 sec, 0.135 sec and 1.0 sec respectively with 15% reduced speed overshoot. The maximum speed response is 2400 rpm reached and it gives better stable speed control performance than MRAS and fuzzy logic controllers. The neuro-fuzzy controller enhances the speed performance of PMSM drive in terms of time domain specifications like delay, rise and peak times are 0.022 sec, 0.028 sec and 0.140 sec respectively. The speed response is comes to stable condition at settling time of 0.75 sec with 10% less overshoot. Figure 14(e), shows the MATLAB R2019b/Simulink diagram based on sensorless MRAS with FOC of PMSM drive. It is demonstrated that the neuro-fuzzy controller gives the better speed control performance than the other controllers in terms of time domain analysis has been listed in Table 5.
Comparative speed response of MRAS, fuzzy logic, neural network and neuro-fuzzy controllers
The main aim of this review article is to demonstrate the various control strategies used to regulate the speed of PMSM drive. The PMSM mostly used in electric vehicles, electric traction, machine tools and high performance industrial drive applications. This article compares the speed response between conventional sensorless MRAS, fuzzy logic, neural network and neuro-fuzzy controllers based on FOC strategy of PMSM drive. The machine learning techniques has the salient features are design is easy, fast accessing speed and less executing time over the traditional controllers. The different types of controlling algorithms used in controller’s difficulty and its drawbacks are discussed in this article. The combination of neural network and neuro-fuzzy intelligent controllers has deliver good speed response than conventional sensorless techniques. The above mentioned controlling techniques are implemented and simulated by using MATLAB R2019b/Simulink software. The experimental environment is variable-step solver selection and ode23tb (stiff/TR-BDF2) solver based on sensorless MRAS and FOC technique of PMSM. The further extensive study may be implement by using machine learning controlling algorithms along with an optimization techniques on Brush Less Direct Current (BLDC) motor and also analyze the performance characteristics of drive in real time is needed.