
Abstract
To improve the traditional image segmentation, an efficient multilevel thresholding segmentation method based on improved Chimp Optimization Algorithm (IChOA) is developed in this paper. Kapur entropy is utilized as the objective function. The best threshold values for RGB images’ three channels are found using IChOA. Meanwhile, several strategies are introduced including population initialization strategy combining with Gaussian chaos and opposition-based learning, the position update mechanism of particle swarm algorithm (PSO), the Gaussian-Cauchy mutation and the adaptive nonlinear strategy. These methods enable the IChOA to raise the diversity of the population and enhance both the exploration and exploitation. Additionally, the search ability, accuracy and stability of IChOA have been significantly enhanced. To prove the superiority of the IChOA based multilevel thresholding segmentation method, a comparison experiment is conducted between IChOA and 5 six meta-heuristic algorithms using 12 test functions, which fully demonstrate that IChOA can obtain high-quality solutions and almost does not suffer from premature convergence. Furthermore, by using 10 standard test images the IChOA-based multilevel thresholding image segmentation method is compared with other peers and evaluated the segmentation results using 5 evaluation indicators with the average fitness value, PSNR, SSIM, FSIM and computational time. The experimental results reveal that the presented IChOA-based multilevel thresholding image segmentation method has tremendous potential to be utilized as an image segmentation method for color images because it can be an effective swarm intelligence optimization method that can maintain a delicate balance during the segmentation process of color images.
Keywords
Introduction
With the vigorous development of computing technology, the performance of image acquisition equipment has been greatly improved, and color image processing technology has attracted more and more attention [1]. Image segmentation is widely employed in image processing, pattern recognition, and artificial intelligence, which are closely related to computer vision [2]. In order to identify and analyze the targets of interest in an image, it is necessary to separate these relevant regions from the image background. Image segmentation is the technique and process of dividing an image into a series of meaningful targets or regions with their characteristics, which is a crucial preprocessing step in image analysis and understanding. Image segmentation is generally based on two properties of pixel grayscale values: discontinuity and similarity. The boundedness between regions tends to have grayscale discontinuity, while the interior of regions generally has grayscale similarity. Therefore, a large number of image segmentation methods have been proposed on the basis of grayscale discontinuity and similarity, such as thresholding [3], region-growing method [4], edge detection [5], etc. Among all the existing segmentation methods, thresholding plays an important and effective role with respect to simplicity and high accuracy, which can be divided into bi-level and multilevel thresholding. Bi-level thresholding separates the image into two classes: background and target, whereas multilevel thresholding is up to partition the image into several regions with different gray levels [6]. Multilevel thresholding is more applicable to complicated and multi-target images than bi-level thresholding, which is adopted in most color image multilevel thresholding segmentation problems.
Over the years, distinct thresholding segmentation methods have been presented by many scholars, e.g., Otsu’s method, maximum entropy method and minimum error method etc. Otsu’s method is an automatic determination thresholding method proposed by Japanese scholar Nobuyuki Otsu in 1979, whose criterion for choosing the optimal threshold is to maximize between-class variance [7]. The maximum entropy method is also known as Kapur entropy whose segmentation principle is to quantify the sum of the target entropy and the background entropy of the segmented image is as large as possible [8]. In 1984, researchers Kittler et al, introduced a new technique for histogram-based threshold segmentation called the minimum error threshold method (MET) [9]. These thresholding segmentation methods can be easily extended to multilevel thresholding. Among them, Kapur entropy is more sensitive to the size of the classification area than Otsu’s method, and can better retain the small details in the image [10]. Multi-threshold image segmentation technique is more advisable for multi-target images, which can be divided into multiple regions to find the foreground and background of the image. However, the computational time of the regular multilevel thresholding method will improve exponentially for searching thoroughly for the best thresholding values of objective functions.
Considering the above limitation, the process to find the optimal thresholding values of multilevel thresholding can be considered as a constrained optimization problem. Accordingly, it is necessary to search the optimal thresholds with the help of intelligent optimization algorithms to decrease the computational cost and overcome the computational complexity issues. Over the years, many intelligent optimization algorithms have been used for multilevel thresholding segmentation. For example, Particle Swarm Optimization (PSO) [11–14], Crow Search Algorithm (CSA) [15–18], Grey Wolf Optimization (GWO) algorithm [19–22], Sparrow Search Algorithm (SSA) [23, 24], Whale Optimization Algorithm (WOA) [25], and newly discovered Prairie Dog Optimization Algorithm (PDO) [26], Dwarf Mongoose Optimization Algorithm (DMOA) [27], Reptile Search Algorithm (RSA) [28] etc. No-Free-Lunch (NFL) theorem illustrates that any perfect optimization algorithm may execute well in one type of problem while failing to solve all kinds of problems [29]. When segmenting color images, intelligent algorithms with subpar search capabilities frequently make segmentation mistakes. Because of this, improving intelligent algorithms to seek accuracy and stability, carry out more in-depth analysis operations, and improve the accuracy of color image segmentation is one of the more difficult problems.The Chimp Optimization Algorithm (ChOA) [30, 31] is a novel meta-heuristic optimization algorithm presented by Khishe M and Mosavi M R, in which the inspiration of the search algorithm comes from the predation of chimps. It has been applied to path planning problems[32], extreme learning machines[33],feature selection[34] and other fields. However, the ChOA algorithm has not been used for color image segmentation. It can address the low accuracy and instability of image segmentation. Hence, we apply it to the multilevel thresholding segmentation.
Though ChOA excels at solving the optimization problems, it is not without flaws. The limitations of ChOA are mainly reflected in the following points. 1)In the population initialization stage, the quality of solutions is poor, which can easily lead to a lack of population diversity and miss the potential optimal solutions. 2) The balance between the exploration process and the exploitation process of the chimp optimization algorithm is indirectly determined by f. In the standard ChOA, a fixed decreasing rate of f does not meet the needs of ChOA at different stages, so it is difficult to maintain the balance between exploration and exploitation. 3) In ChOA, the final position of the prey is jointly determined by the positions of the four functional chimps, there is no information sharing and learning between the four species. This position update approach can easily lead the algorithm into a local optimum.
In response to the drawbacks of ChOA, which other intelligent optimization algorithms suffer from similarly. Many strategies are presented by scholars to improve optimization algorithms. The general modification strategies are chaotic optimization [35], opposition-based learning [36], Gaussian mutation and Cauchy mutation [37–39] etc. Xin Lv proposed an improved version of the sparrow search algorithm (SSA) based on the tent chaotic optimization for solving the lack of population diversity [40]. The experiments revealed that the results of the gray-scale image segmentation were superior to those compared algorithms in this domain. Hussien A G came up with a self-adaptive Harris Hawks optimization algorithm with opposition-based learning and chaotic local search strategy for global optimization, which can enhance the search ability and avoid falling into the local optimum. In addition, the IHHO applied in feature selection outperforms compared algorithms [41]. Dai, Xiangshan, Lianghong, et al presented a novel harmony search algorithm (HS) with Gaussian mutation and overcame the disadvantages of HS, especially, since the Gaussian mutation has a strong ability to escape from the local optimum. Further experimental results show that the harmony search algorithm with Gaussian mutation (GMHS) is competitive in convergence and diversity performance [42]. Xu Ming proposed a grey wolf optimization algorithm (GWO) based on multi-strategy fusion, and designed a nonlinear parameter strategy of the sine function to replace the linear decreasing strategy of standard GWO, so as to realize a good transition from exploration to exploitation. At the same time, the optimal position of the individual and the individual in the decision layer are used to guide the group search, and the pinhole imaging strategy is used to help the algorithm break away from the shackles of local optimum [43]. Xin Wei addressed the low convergence rate and premature convergence problems of the standard empire competition algorithm in the competition process and proposed to introduce Gaussian variation in empire competition and Cauchy variation in empire extinction. The improved empire competition algorithm is improved in terms of convergence accuracy and merit-seeking accuracy [44]. To sum up, both Gaussian mutation and Cauchy mutation have a strong jump, which increase the optimization ability of individuals in the population and avoid the algorithm falling into local optimal. OBL increases the search range of the solution space by generating the reverse population, which prevents the fluctuation of the population from jumping out of the search scope. Chaotic optimization keeps the advantage of disorder between different individuals in the group and helps algorithms search for more potential solutions. The unique position update of the PSO algorithm and the non-linear update strategy of parameters can balance the exploitation and exploration of optimization algorithms. Thus, these strategies have a good effect for optimization algorithms.
Based on the above discussions, the improved Chimp Optimization Algorithm is presented in this paper and applied in the field of multi-threshold image segmentation. Specifically, the main contributions of this paper are: (a) Multiple improvement strategies are applied to enhance the original ChOA,(b) the proposed technique is put to full use in multi-threshold image segmentation, (c) IChOA is compared with the traditional ChOA and other metaheuristic methods based on experiments with benchmark functions, (d) IChOA which is applied to the Kapur entropy based multilevel thresholding for image segmentation is also compared with other multilevel thresholding techniques based on intelligent optimization algorithms,(e) the image segmentation quality is significantly enhanced and computational complexity of multilevel thresholding is greatly reduced.
The remainder of this paper is organized as follows: Section 2 explains the basic principles of ChOA. Section 3 presents the new method and the performance of the modified algorithm is verified by the benchmark function in Section 4. Section 5 shows the experimental results of the IChOA for multilevel color image thresholding segmentation applying Kapur’s entropy. Finally, the conclusion and analysis are drawn in Section 6.
The basic chimp optimization algorithm
The chimp optimization algorithm was developed by Khishe M and Mosavi M R in 2020 [30], which is inspired by the hunting phenomenon of the chimps group. In the society of chimps, they can be divided into four types of chimps named as driver, barrier, chaser and attacker, performing their duties as group members. Their capacity for biodiversity is a necessary condition for successful hunting. The chasers follow the prey but don’t attempt to catch it. The barriers build obstacles on the tree or on the way the prey goes. The chasers run quickly behind the prey to catch up with it. Finally, the attackers predict the prey’s breakout route, pressing the prey to return to the chaser’s route. The chimps use four stages to search and hunt prey: driving, blocking, chasing and attacking. Driving, blocking and chasing are devoted to exploration and attacking includes exploitation. The mathematical models are established in the following.
Driving and chasing stage
The mathematical model of driving and chasing the prey is described as Equation (1).
The attacker is used to conduct the hunting process, the barrier and chaser, and the driver are also participating in the hunting process occasionally. The attacker is considered as the best solution and updates its position when it finds an improved solution. The positions of the barrier, chaser and driver update their positions in accordance with the position of the attacker by using the following Equations (7)–(11).
Equation (8) is the position update formula of the four chimp groups, and Equation (9) indicates that the position of the prey is estimated jointly from the positions of the four chimp groups. When the prey is forced to stop moving, the attacker will immediately attack the prey and complete the hunt in the final stage, at which f and a will decrease. When a ranges from –1 to 1, the new position of the chimp is between the old position of the chimp and the position of prey. When |a| < 1, chimps gather to surround prey, which is the exploration phase of the algorithm. When |a| > 1, chimps disperse to search for prey, which is the exploitation phase of the algorithm. The figure of iterative updates is shown in Fig. 1.
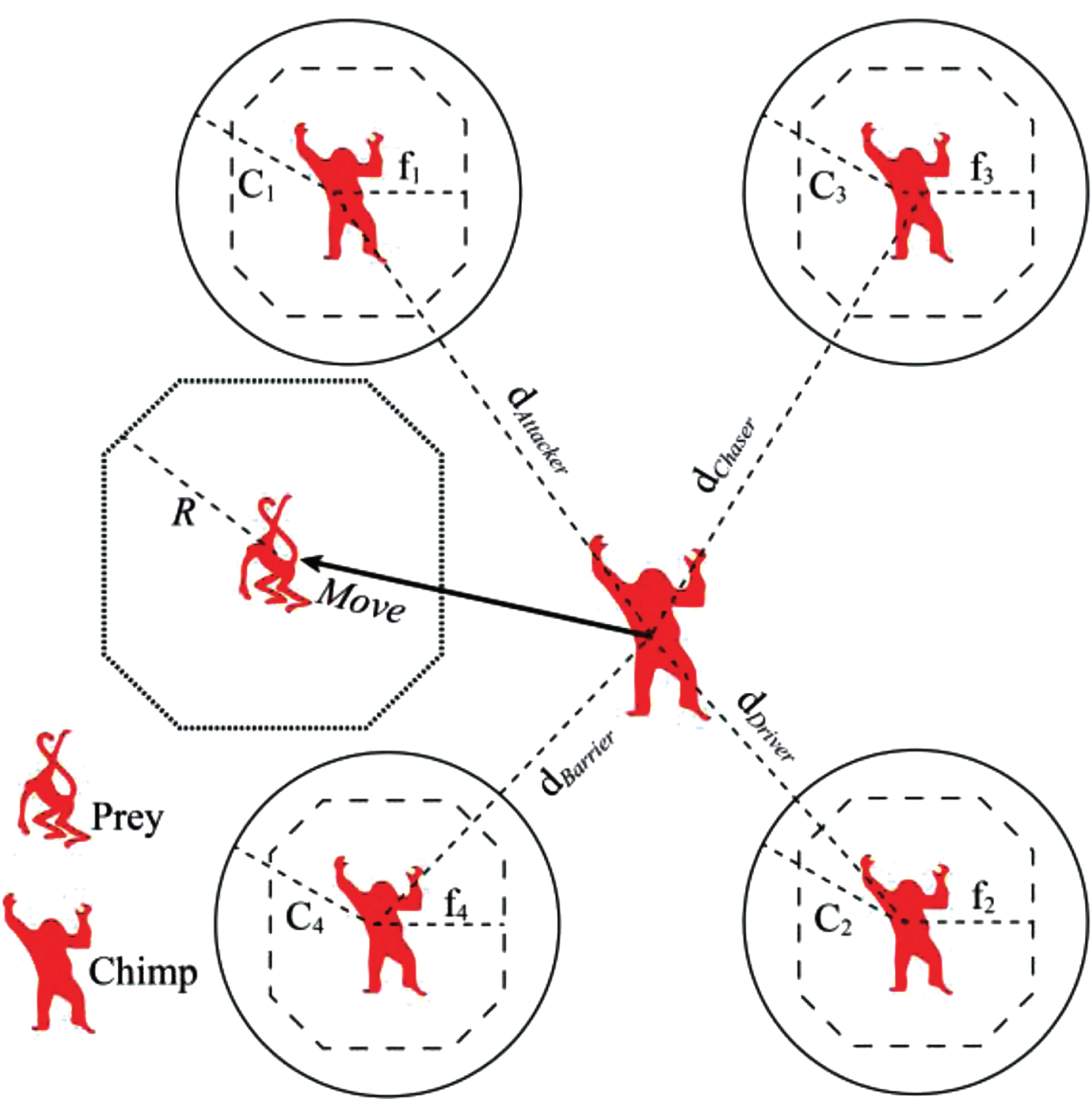
Iterative updates in position.
Opposition-based learning strategy based on Gauss map
The newly presented initialization strategy contains two main parts: chaotic maps and opposition-based learning.
Chaotic map
The phenomenon of chaos describes the development principle of uncertain rules under the appearance of irregular development, which usually has the characteristics of pseudo-randomness, ergodicity and initial value sensitivity [45, 46]. The positions of chimps are generated by random initialization in the traditional ChOA algorithm, which can lead to the uneven distribution of chimp positions. In order to advance the quality of the solution, chaotic optimization is used in the population initialization. The common chaotic optimization methods include the Logistic map [47], Tent map [48] and Gauss map [49]. In Fig. 2, the bubble diagram of Logistic map has higher probability between [0,0.1] and [0.9,1], but the interval distribution is not very uniform. And it can be found from Fig. 3 that only the system with chaotic initial value greater than 0.5 will enter the chaotic state, and there are small cycles as well as unstable periodic points in the Tent map chaotic state, and there are small cycles as well as unstable periodic points in the Tent map [50]. Therefore. we make use of the Gauss map to obtain more evenly distributed population of individuals. Gauss map is defined as follows.

Bubble diagram of Logistic map.
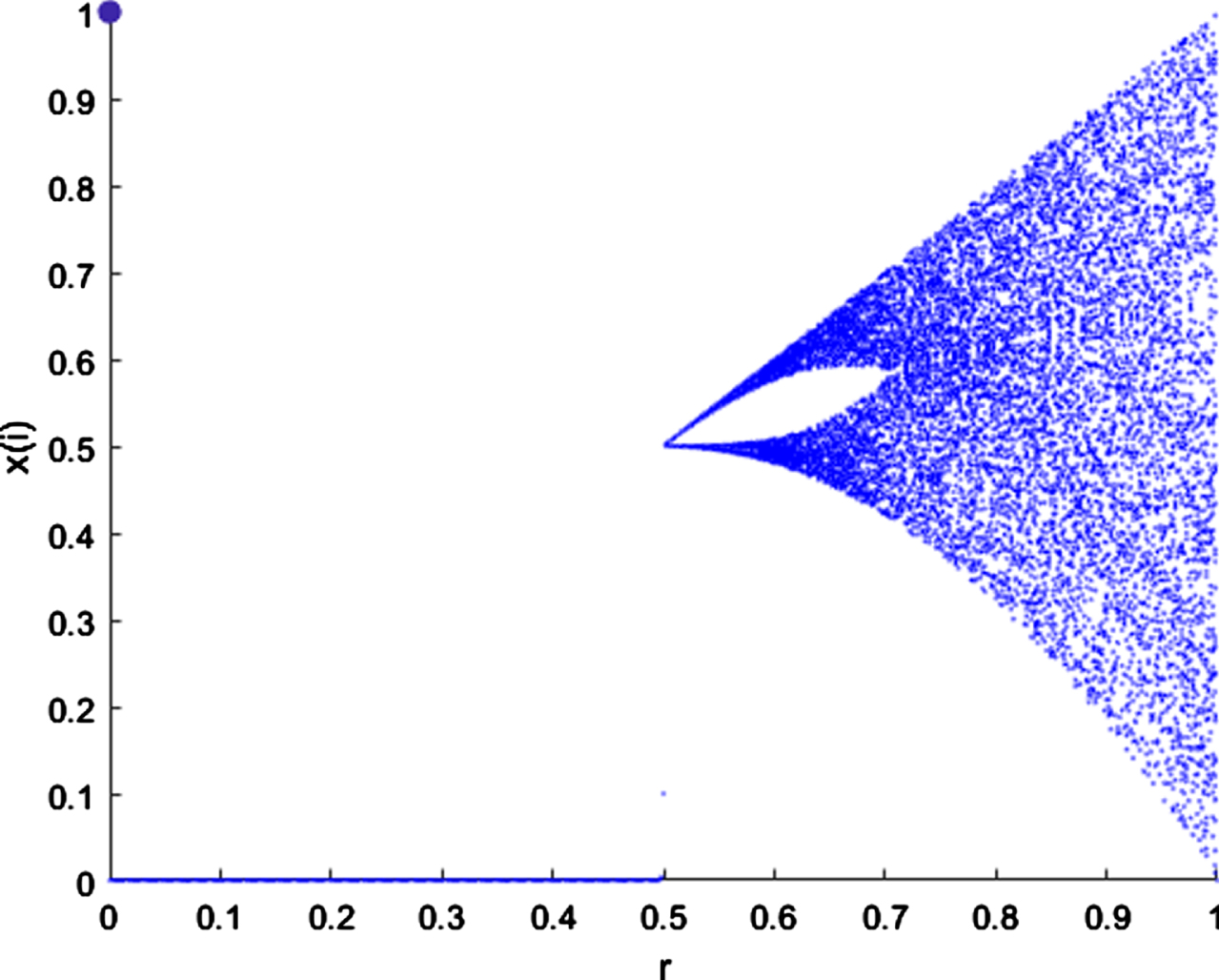
Bifurcation diagram of Tent map.
Opposition-Based learning (OBL) is the mathematical concept proposed by Tizhoosh et al. in 2005 [51], which can boost the efficiency of intelligence optimization algorithms. In basic ChOA, the population of chimps is generated randomly in each iteration, which can easily visit the same area of the search space and fall into the local optimal. The core of OBL is to expose a reverse population of the current population in the search space, calculate individual fitness and take the better one to the next iteration. The mathematical expression of OBL is expressed as:
In the chimp optimization algorithm, the transformation of the search process depends on the switch parameters and the structure of the algorithm. It is not difficult to imagine that good switch parameters and search methods can increase the flexibility of the algorithm and improve the search efficiency of the algorithm. Based on this, this paper proposes an adaptive variable speed strategy.
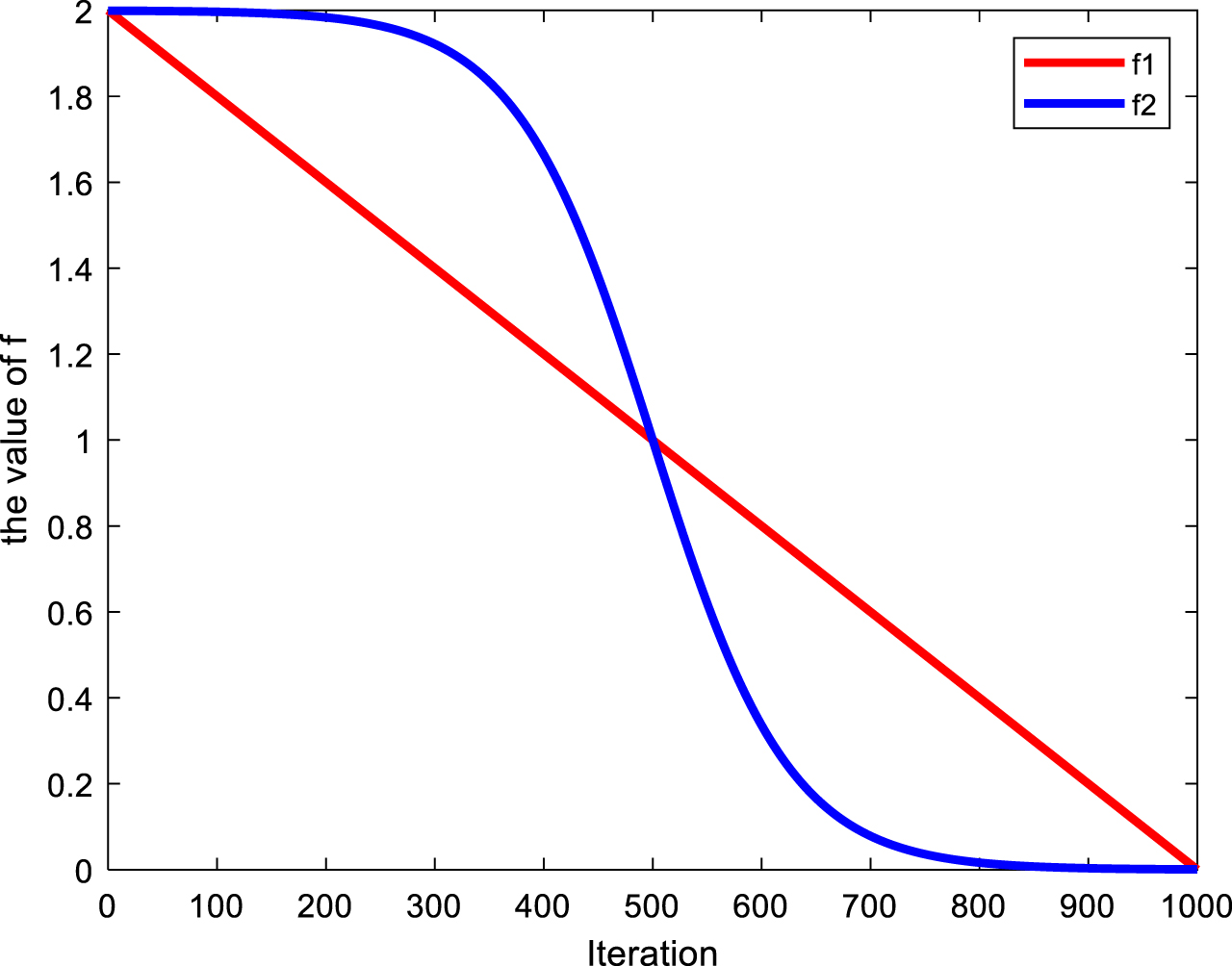
In ChOA, the value of f decreases linearly. According to Equation (5), it is not difficult to see that the change rate of original f keeps uniform speed regulation, that is also the reason why the exploitation and exploration is unbalanced. The process of chimps scattering to find prey and chimps gathering to round up prey represents the exploration and exploitation phase of the ChOA algorithm, respectively.
The first stage of ChOA algorithm focuses on the global search, which should be time-consuming in order to search for as many global optimal solutions as possible. The convergence speed of the algorithm needs to be increased in the middle of the algorithm and slowed down in the latest stage of the algorithm to perform the concerned local search. In response to the poor balancing ability of the traditional ChOA algorithm to balance the exploration and exploitation phases, the update equation of f is improved, and the improved equation is given as follows.
Bifurcation diagram of Tent map.
In the attack stage of the algorithm, a concerned local search is required, which makes it easy to fall into the local optimum and results in low convergence accuracy of the algorithm. The Gaussian mutation and Cauchy mutation have been introduced to many swarm optimization algorithms and work well, therefore, the Gaussian-Cauchy mutation is proposed in this paper.
The Gaussian distribution, also known as the normal distribution, was first proposed by the French mathematician Démoffel in 1733. The expression for the probability density function of the Gaussian distribution is defined as follows [56].
The Cauchy distribution can also be referred to as the Cauchy-Lorentz distribution, and the functional expression of the Cauchy distribution is as follows [57].
The curve of the Cauchy probability density function and standard normal distribution is shown in Fig. 5. It is clear from Fig. 5 that both the normal distribution and the Cauchy distribution have long and fat tails, but the standard Cauchy distribution curve is longer and fatter compared to the standard normal distribution. This means that the range of mutable variances is much larger and has a strong perturbation capability. Consequently, the introduction of the Cauchy variation strategy can help the optimal solution outperform the local optimum with greater probability. Besides, it can be observed from Fig. 5 that both the standard normal distribution and the Cauchy distribution function can reach the extreme value at the origin, but the extreme value of the Gaussian distribution function is greater. Introducing the Gaussian variation strategy in algorithms can focus on searching the area near the original optimal solution, improving the local search ability of algorithms and shortening the algorithm running time. Given the characteristics of both, the Gaussian-Cauchy mutation is added to improve ChOA.
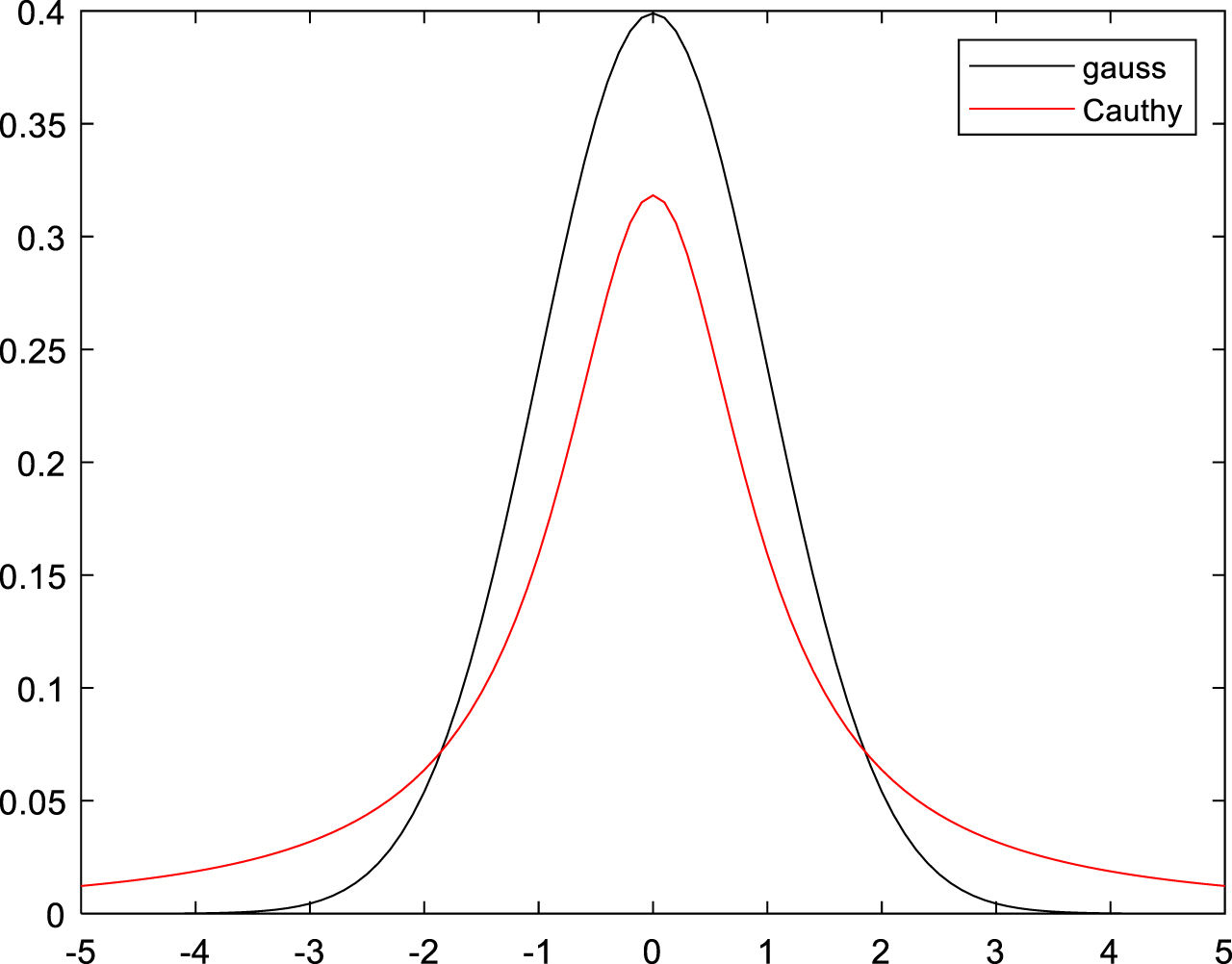
Cauchy distribution and Gaussian distribution.
The optimal individual XAttacker at the current number of iterations is calculated as follows.
In the traditional ChOA algorithm, the position of the prey is estimated by the position of the attacker, the obstacle, the chaser and the driver. In the late stage of the algorithm, when chimps surround prey, it is prone to the situation that chimp populations quickly gather and surround prey in a short time, which accelerates the convergence rate of ChOA. However, the improvement of the convergence rate is often accompanied by the decrease of population diversity, which greatly increases the probability of ChOA falling into the local optimum. Particle swarm optimization algorithm (PSO) is a classical intelligent optimization algorithm with excellent global optimization-seeking capability. Each particle in the particle swarm optimization algorithm will individually search for the optimal solution in the search space, and will be recorded as an individual extreme value. The individual extreme value is also shared with other particles in the whole swarm. All particles in the swarm update their velocities and positions based on the optimal values they find with the global optimal solution after shared experience. The position update formula of the particle swarm optimization algorithm is as follows.
Here, b1 and b2 are social cognitive factors and individual cognitive factors, respectively, representing the experience exchange and learning among chimp populations. w1 ∼ w4 is the inertia weight factor. r is the random number in the range of [0,1]. X best (t) denotes the optimal position of the ith chimp at the current iteration. In contrast to the traditional prey position update Equation (9) for ChOA, Equation (24) consists of two parts, one represents empirical learning between chimpanzee populations and the other represents individual chimp learning from the optimal individual. It further improves the local and global search ability of the algorithm and the convergence speed.
The specific implementation steps are as follows: Set the population size n, the number of iterations T, the population dimension d, and the coefficient vectors a, m, c. Population initialization. The Gauss chaotic sequence is used to generate the initialized population, and the corresponding reverse population is generated according to the OBL. The fitness values of individuals in all populations are calculated and arranged in descending order, and the first n individuals with the best fitness values (smallest fitness) are selected as the initialized population X
i
, i = 1, 2, 3, ⋯ , n. The first four individuals with the best fitness values are selected and identified as XAttacker, X
Barrier
, X
Chaser
and X
Driver
in order. A nonlinear strategy is introduced to update f, a and c to balance the exploration and exploitation of the algorithm. Update chimp positions according to equations (7) and (8). Combined with the PSO algorithm, the group experience-sharing mechanism is introduced to update the location of prey according to equation (24). Gaussian-Cauchy mutation is performed on the optimal solution XAttacker according to equation (13). Determine whether the maximum number of iterations T is satisfied, if it has been reached, the algorithm ends and outputs the optimal solution XAttacker. otherwise, return to Step3 to continue the program.
In addition, the proposed IChOA algorithm’s pseudo code is present in this section.
IChOA-based segmentation Algorithm
Multilevel thresholding image segmentation
The threshold segmentation usually is summarized into bi-level thresholding segmentation and multilevel thresholding segmentation based on the number of threshold values [58]. The advantage of multilevel thresholding segmentation is that it can segment a complex image into multiple regions to obtain better segmentation results. Assuming an image has L gray levels (L≥2), the region partition is as follows.
The critical step of thresholding is the selection of optimal thresholds, which is related to the quality of segmentation. Therefore, we use metaheuristic algorithms to obtain the optimal thresholds by optimizing the objective function. In the paper, Kapur’s entropy is adopted as the objective function.
Kapur’s entropy is a method that optimizes the fitness function and thus determines the optimal threshold value, which is an entropy-based threshold selection method proposed by Kapur et al. in 1985 [59]. The principle of multi-threshold image segmentation based on Kapur entropy is as follows:
Assuming that an image has L gray level and the grayscale range is [0, L-1], the probability of pixels in the gray level i can be expressed as:
Expanding to multi-level thresholds, the objective function is defined as H (t1, t2, ⋯ , t
n
) = H0 + H1 + ⋯ + H
n
.
From Equation (33), it is not difficult to see that the essence of the Kapur entropy-based image segmentation is the problem of solving the optimal threshold, so the intelligent optimization algorithm can be used to optimally solve the optimal threshold and check the performance of IChOA in finding the optimal value at the same time. The flowchart of IChOA for multilevel thresholding is shown in Fig. 6.
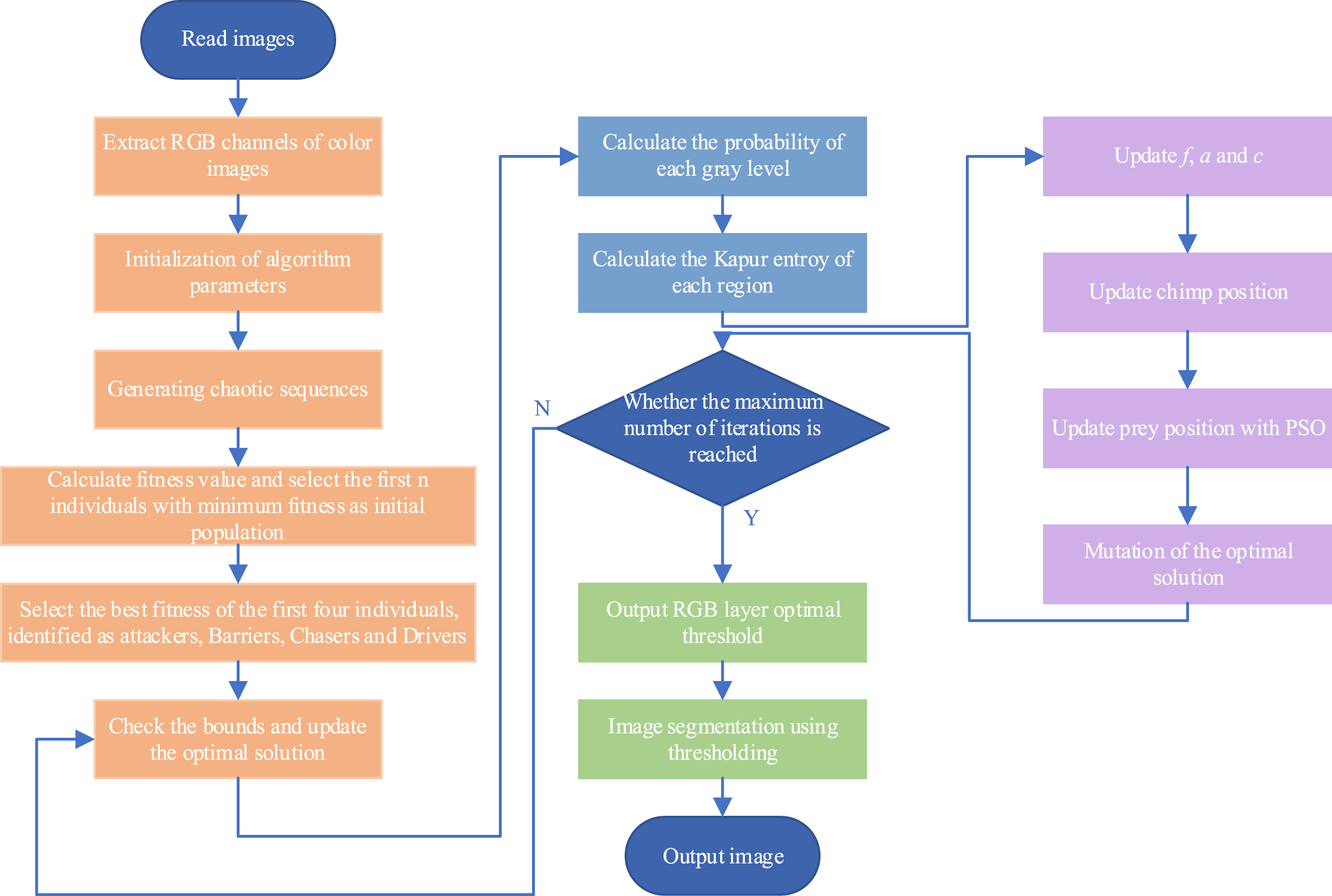
The flowchart of IChOA for multilevel thresholding.
Selection of benchmark functions
In order to validate the performance of the IChOA algorithm in this paper, 12 classical benchmark functions from Simon Fraser University are introduced for testing and shown in Table 1, which are classified into three types according to their physical characteristics and shape features: unimodal, multimodal, and fixed-dimension multimodal functions. The two-dimensional images of the selected test functions are shown in Fig. 7.
Description of benchmark functions
Description of benchmark functions
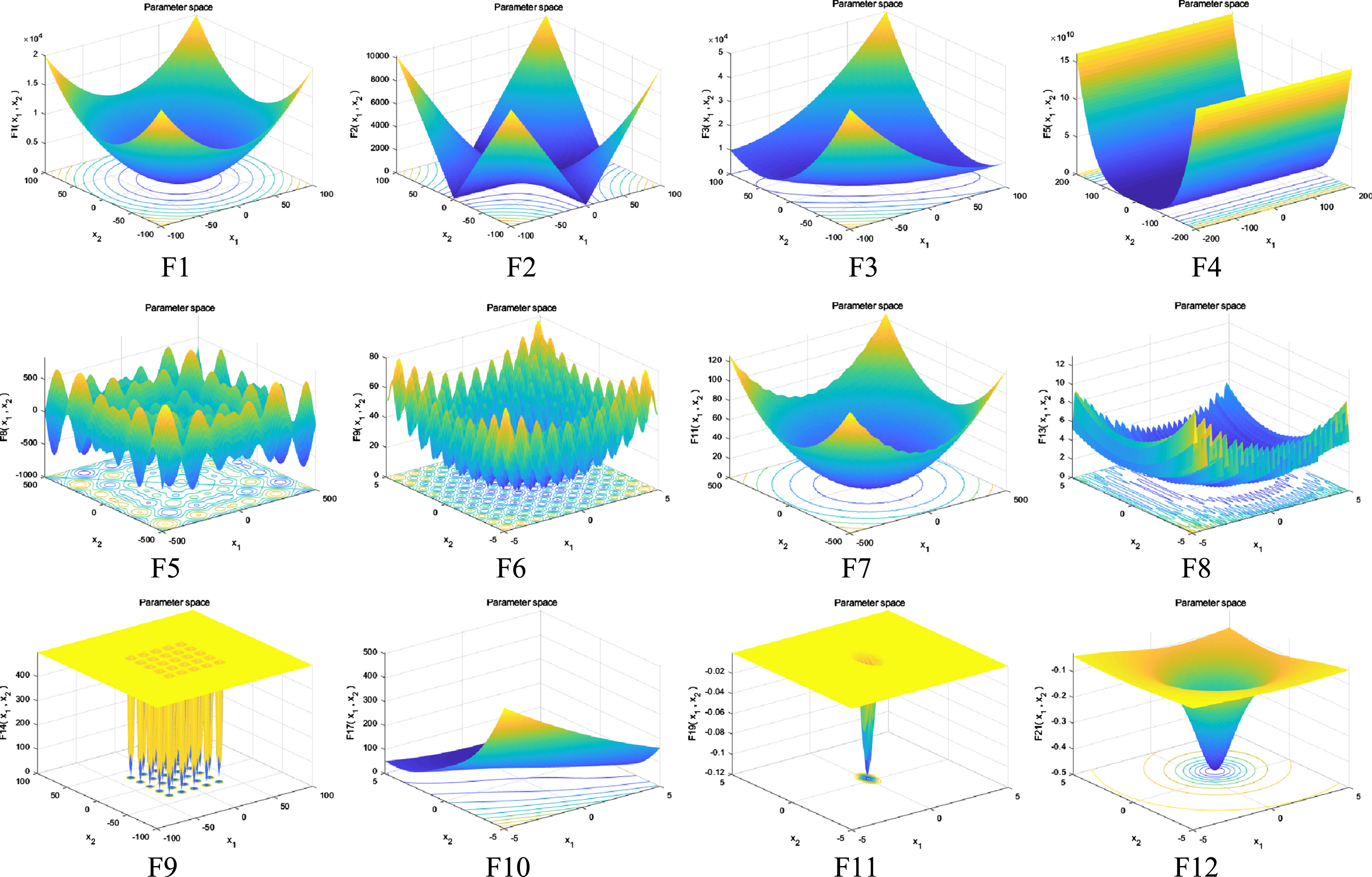
Two-dimensional spatial graph of the benchmark function.
The experiments were conducted on a PC with a 2.20 GHz CPU and 12 GB RAM, an operating system of windows 10, and the Matlab R2019a environment. To further evaluate the performance of the IChOA algorithm visually, The IChOA is compared with other well-established algorithms: The whale optimization algorithm (WOA) (Mirjalili S, 2016), the grey wolf optimization algorithm (GWO) (Mirjalili S, 2014), the crow search algorithm (CSA) (Askarzadeh, 2016) and particle swarm optimization (PSO) (Poli R, 2007).
The population numbers of all algorithms are 30, and the maximum number of iterations is set to 1000. Moreover, to verify the performance of involved optimization algorithms precisely, all experiments were run independently 30 times. The parameter value of these optimization algorithms is shown in Table 2 specifically.
Experimental results of IChOA
To verify the validity of the seven different algorithms, 12 typical benchmark functions described above were introduced for testing. The experiment was guaranteed to be executed under the same experimental background, and the general parameters are selected and set based on Table 2. The experimental results are shown in Tables 3∼5 where the optimal value, the mean value (avg.) and the standard deviation (stdv.) were recorded. What’s more, the boldface in the table is the best result. The optimal value represents the minimum value obtained by algorithms, the average value can be to evaluate the solution accuracy of algorithms and the standard deviation reflects the stability of algorithms.
Parameter setting of each algorithm
Parameter setting of each algorithm
Unimodal benchmark function test results
Multimodal benchmark function test results
Fixed-dimension function test results
From Fig. 7, there is only one global optimal solution for the unimodal benchmark functions, which can be used to test the global search capability of algorithms. The multimodal functions are used to test the exploration capability and the fixed-dimension benchmark functions can verify the ability to jump out of the local optimum and the accuracy of the algorithm’s convergence. Under the same conditions, it can be recognized that the experimental results of the presented IChOA are superior to other compared algorithms on 12 benchmark functions.
The unimodal functions can be considered as valid approaches to test the exploration ability of optimization algorithms. Convergence curves of some classical unimodal test functions are displayed in Fig. 8. It can be seen that IChOA has outstanding convergence speed and great convergence accuracy, especially F4. F4 is the typical non-convex function, whose global optimum lies in a long, narrow, parabolic-shaped flat valley.
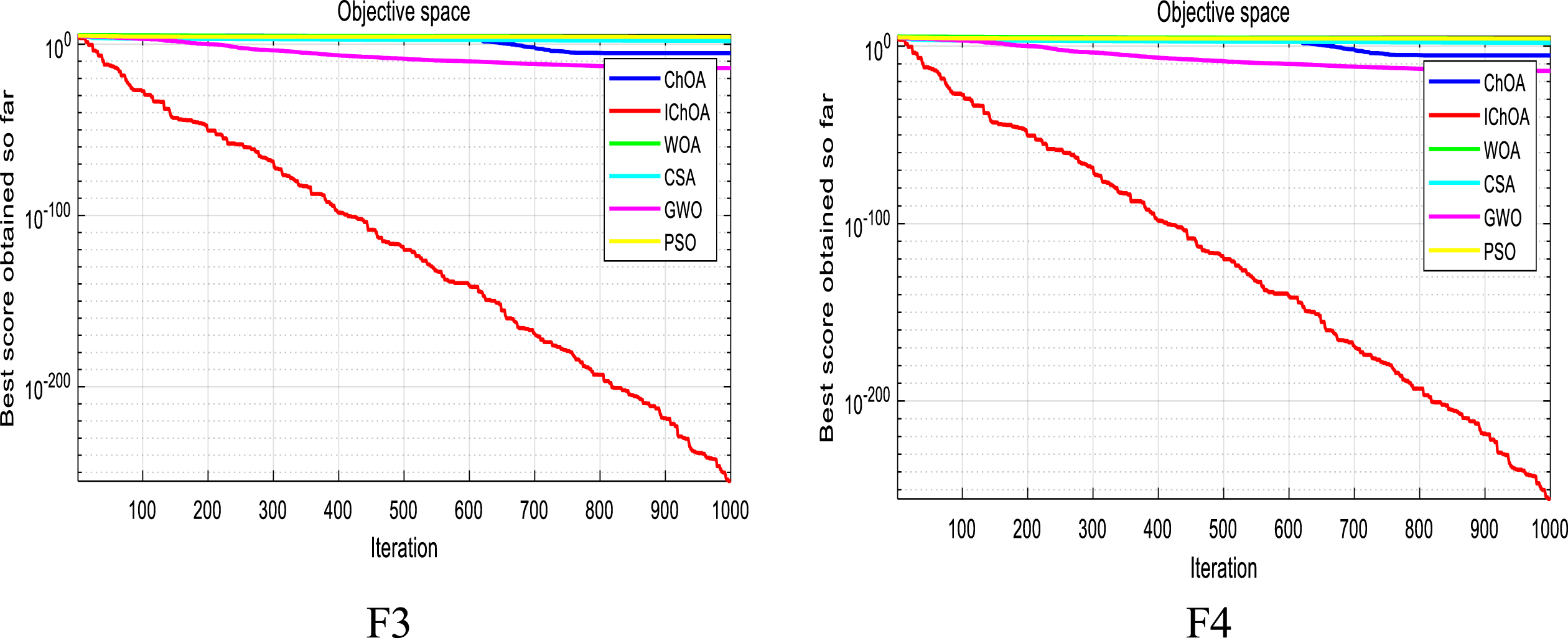
Convergence curves of some unimodal test functions.
To find the valley is trivial, but it is tough to converge to the global optimal value. Table 3 shows the experimental results of unimodal benchmark functions between IChOA and ChOA, PSO, GWO, CSA and WOA. It is not difficult to find that, IChOA is significantly superior to the compared algorithms in the remaining test functions. In large part, this is because the adaptive variable speed adjustment strategy of f tunes the local search capability of ChOA, thus enhancing the exploration ability of the algorithm. Compared with the experimental result of the basic ChOA, the numerical results gained by IChOA are reduced by at least three orders of magnitude, which is certainly a great improvement. Taken together, the IChOA can undoubtedly improve the search ability and has strong stability.
The multimodal functions are employed to test the algorithm’s search ability. Finding the minimum values of multimodal functions is a fairly troublesome problem because of its large search space and its large number of local optimums. Upon looking at Table 4, we can find that IChOA has an absolute advantage on the test functions when compared with the other six algorithms. Additional information can be obtained by observing Fig. 9, which represents the convergence effect of certain multimodal functions as the number of iterations increases. As it is apparent from the plots, the IChOA has higher exploitation strength and faster convergence speed and it is significantly better than ChOA, WOA, CSA, GWO and PSO in terms of global search ability. In particular, GWO, PSO and CSA all fall into the local optimum early at the beginning of the iteration, and the situation doesn’t improve greatly as the number of iterations develops. This indicates that a better population initialization strategy can obviously improve the inadequate search due to the lack of population diversity in the early stage of algorithms. What’s more, the adaptive strategy regulates the search speed dynamically with the development of the search process, thus it is faster to find the global optimum for IChOA. Overall, ChOA combined with the opposition-based learning strategy based on the Gauss map both help the algorithm improve the search capability and avoid premature maturity of the algorithm.
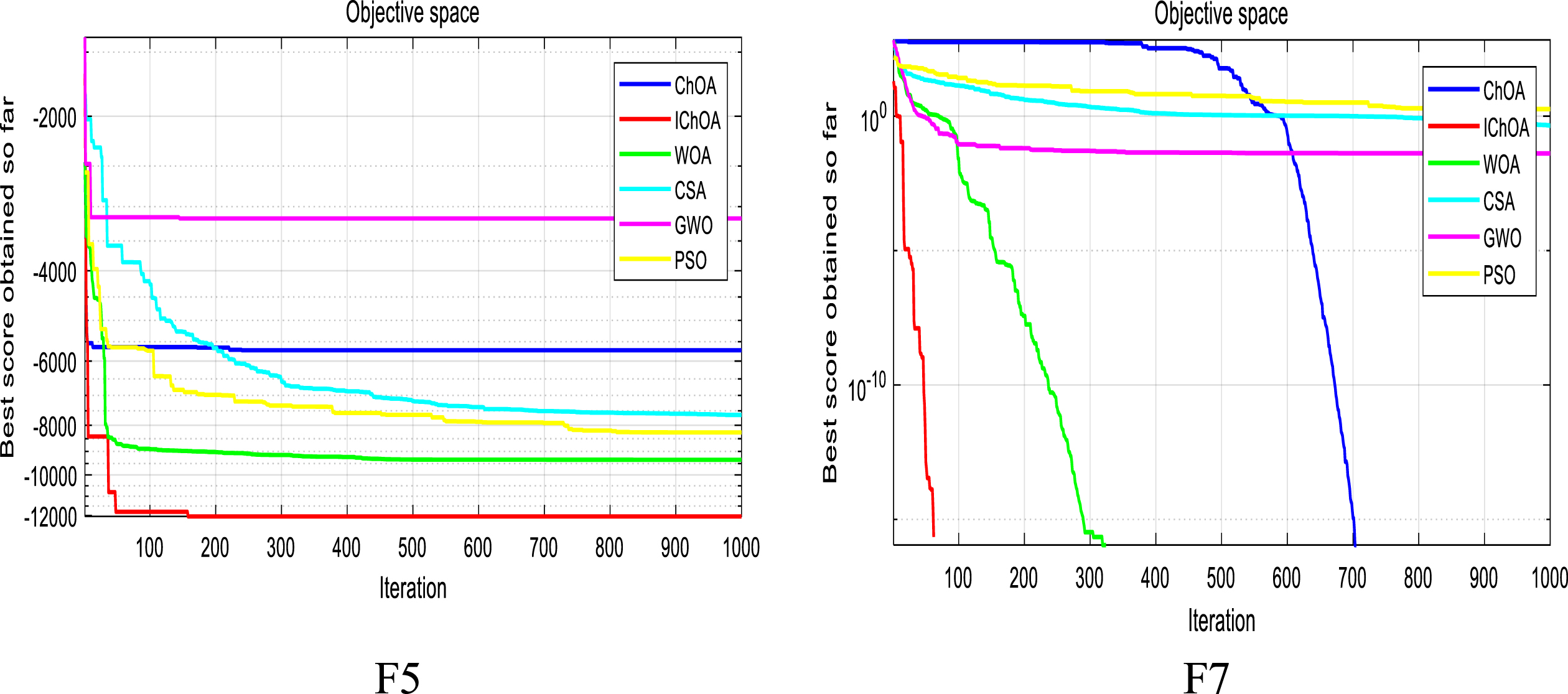
Convergence curves of some multimodal test functions.
F9∼F12 are fixed-dimension benchmark functions, which can be used to examine the ability to escape from the local optimum and further verify the search ability of algorithms. Unlike the above benchmark functions whose is zero, the minimum of the fixed-dimension benchmark functions is fixed non-zero constant, therefore it requires a higher level of capability to balance the exploration and exploitation for algorithms. From the Table 5, it can be clearly found that the convergence stability of IChOA is improved by 75% compared with ChOA. In addition, it can be seen that IChOA performs best overall in terms of mean value and standard deviation. In combination with Fig. 10, the IChOA converges to the global optimum at a very fast rate, which benefits from the Gaussian-Cauchy mutation mechanism and group experience-sharing mechanism. In general, the above experimental results fully demonstrate that IChOA outperforms other comparative algorithms in terms of merit-seeking ability.
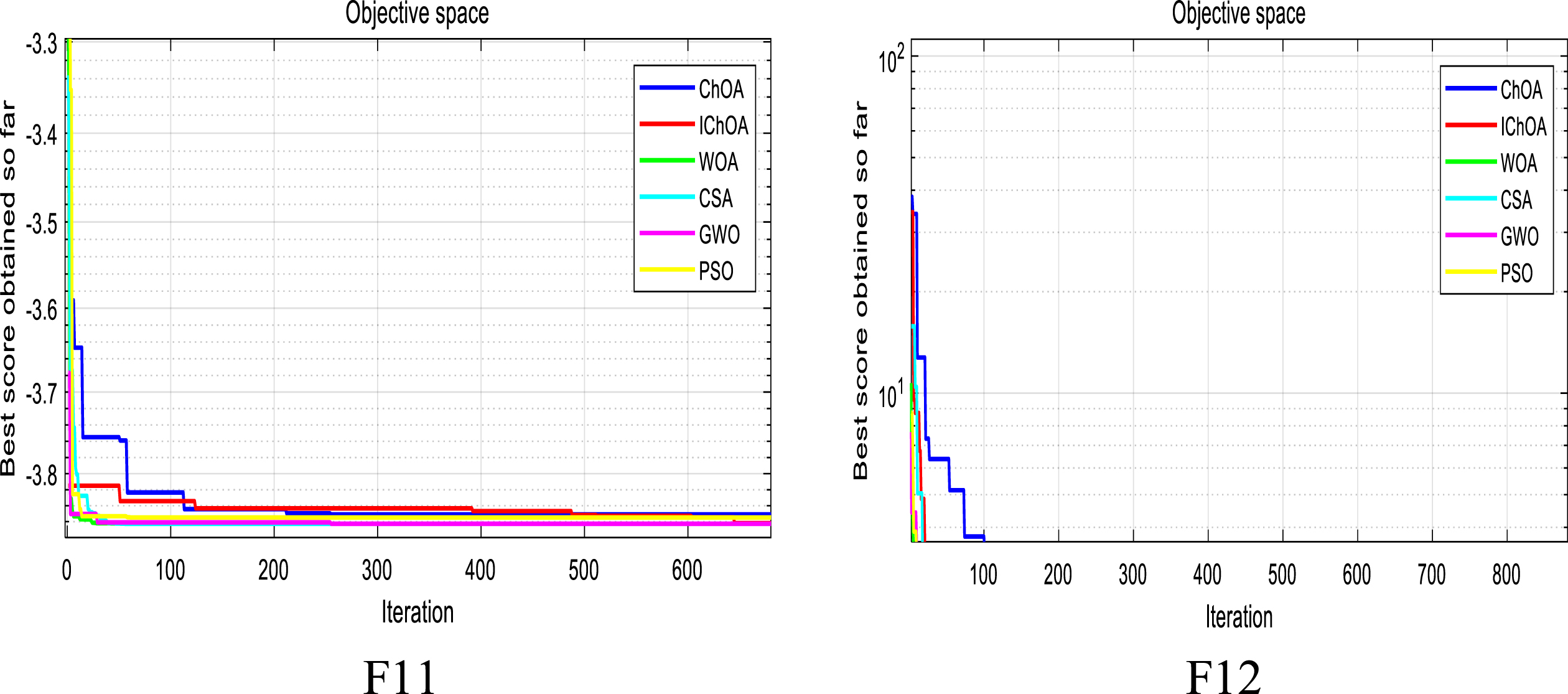
Convergence curves of some fixed-dimension test functions.
This section mainly introduces the environment of the experiments for the presented algorithms. It shows the experimental setup including Berkeley’s images and its histogram firstly. Secondly, the evaluation metrics of image quality are presented. Finally, the analysis and discussion of the experimental results are shown.
Experimental setup
In this experiment, 10 diverse biological images from Berkeley’s image segmentation dataset BSDS500 were selected to test the performance of the proposed algorithms. The image dataset mainly includes seven animal images, 2 people images and 1 still life image, which is exclusive in Fig. 14. And each color image is shown to be multidimensional and multimodal because of the presence of difference bands (RGB). In order to prove the superiority of IChOA in the multilevel thresholding segmentation, GWO, PSO and ChOA which have been applied in many different specific problems are selected for comparison experiments. For a fair comparison, the maximum of iterations is 500 and the initial size of the population is set to 30. And we follow the other parameters in section 5.2.
Additionally, the existence of dense and complex features necessitates the use of an advanced and precise multilevel thresholding technique for the detection and identification of the region of interest. To achieve segmentation, the experiments are conducted on each image with 5-level, 10-level and 15-level. Each experiment for each test image and each selected threshold level should run 30 times independently, and all the results are based on average values. To ensure fairness and convenience for performance comparison between IChOA and other compared optimization methods.
Image evaluation metrics
In order to obtain fair comparisons, following popular performance indicators: the average fitness value, peak signal-to-noise ratio (PSNR), structural similarity (SSIM), feature similarity (FSIM) and computational time (CPU time) are used to evaluate the segmentation results.
The fitness value can be used to evaluate the optimization algorithm results. In this paper, the higher the average fitness value, the better the threshold obtained by algorithms for finding the best values. PSNR is a widely used objective image quality evaluation indicator, which is usually used as a reference value for image quality between the maximum signal and background noise. A larger PSNR value indicates less distortion of the image [60]. The term of SSIM is an important performance metric that describes the structural similarity of the original image and segmented image and is in the range of [–1,1]. The structural information of the image reflects the structure of the objects in the scene, with the brightness and contrast of the image. FSIM mainly uses the Phase Congruency (PC) of the low-level visual characteristics, and the phase congruency has the characteristic of relative invariance, so the Gradient Magnitude (GM) of the image is used as a secondary feature to calculate the contrast information. The final image quality is obtained using a weighted similarity map of phase consistency features and a weighted combination of gradient similarity maps. The higher value of FSIM indicates better performance [61]. The algorithm grows more complex and takes longer to compute as the number of threshold increases. CPU time (in seconds) is chosen as the unit of measurement in order to more easily examine the algorithm’ s computational complexity and time complexity.
A suitable acknowledgement of any borrowed material must always be made.
The value (in dB) of PSNR is defined as:
where MAX indicates the maximum gray value of the image.
SSIM is expressed as:
In order to further verify the advantages of IChOA in image segmentation, Kapur’s entropy is designed as the objective function of the chimp optimization algorithm. In this section, the segmented images using Kapur’s entropy are presented in Fig. 14. Then the experimental results are analyzed and discussed in terms of several evaluation metrics: the average fitness value, SSIM, FSIM, PSNR and calculation time.
On the other hand, Kapur’s method is a maximization problem. Table 6 shows the average fitness of all algorithms in Image 3, Image 4 and Image 6 considering 5, 10 and 15 thresholds and each image is segmented according to R, G, B three layers. From Table 6, It can be found that IChOA obtained the higher fitness value for 20 cases of the 27 experiments. The ChOA and GWO reach the best fitness in 5 and 2 cases respectively. In general, the optimal fitness of IChOA is remarkably better than other compared algorithms, which means that the image segmented by IChOA can achieve a better segmentation effect. What’s more, the fitness values of all the algorithms tend to increase and their segmentation results are better as the threshold levels increase. To summarize, the IChOA has a strong balance of exploration and exploitation capabilities, resulting in improved convergence accuracy.
The fitness values of all algorithms
The fitness values of all algorithms
Tables 7∼9 report SSIM, PSNR, and FSIM from the evaluation of the segmented images, respectively. The SSIM values are applied to assess the similarity between the segmented image and the original image. The higher SSIM value, the segmented image is closer to the original image. Observing results from Table 7, it can be concluded that the IChOA achieve the first-place rankings in 25 cases out of 30 (10 images×3 thresholds), followed by ChOA (with 2 cases), GWO (1 case), and PSO (2 cases). Besides, the average of the SSIM values for all algorithms is shown in Fig. 11.
The SSIM of each algorithm under Kapur’s entropy
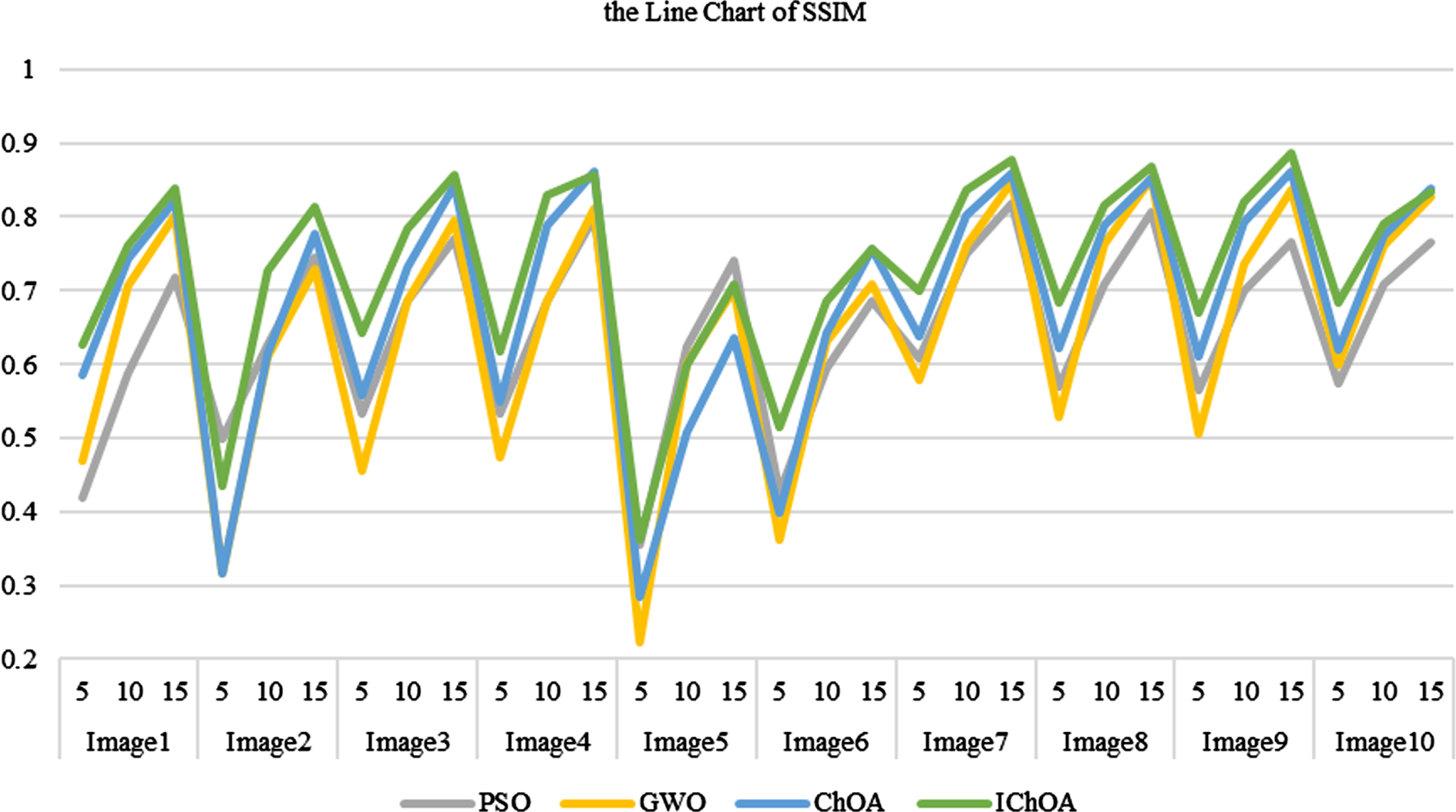
Average of the SSIM values of all algorithms.
The PSNR indicates the distortion of an image before and after compression. Specifically, the higher value of PSNR, the distortion level is lower. The PSNR values of each algorithm are reported in Table 8. A review of Table 8 has demonstrated that the IChOA has superiority over the other compared algorithms. Besides, the IChOA has gained the best values in all test images. Moreover, Fig. 12 illustrates the average of PSNR values of all algorithms.
The PSNR of each algorithm under Kapur’s entropy
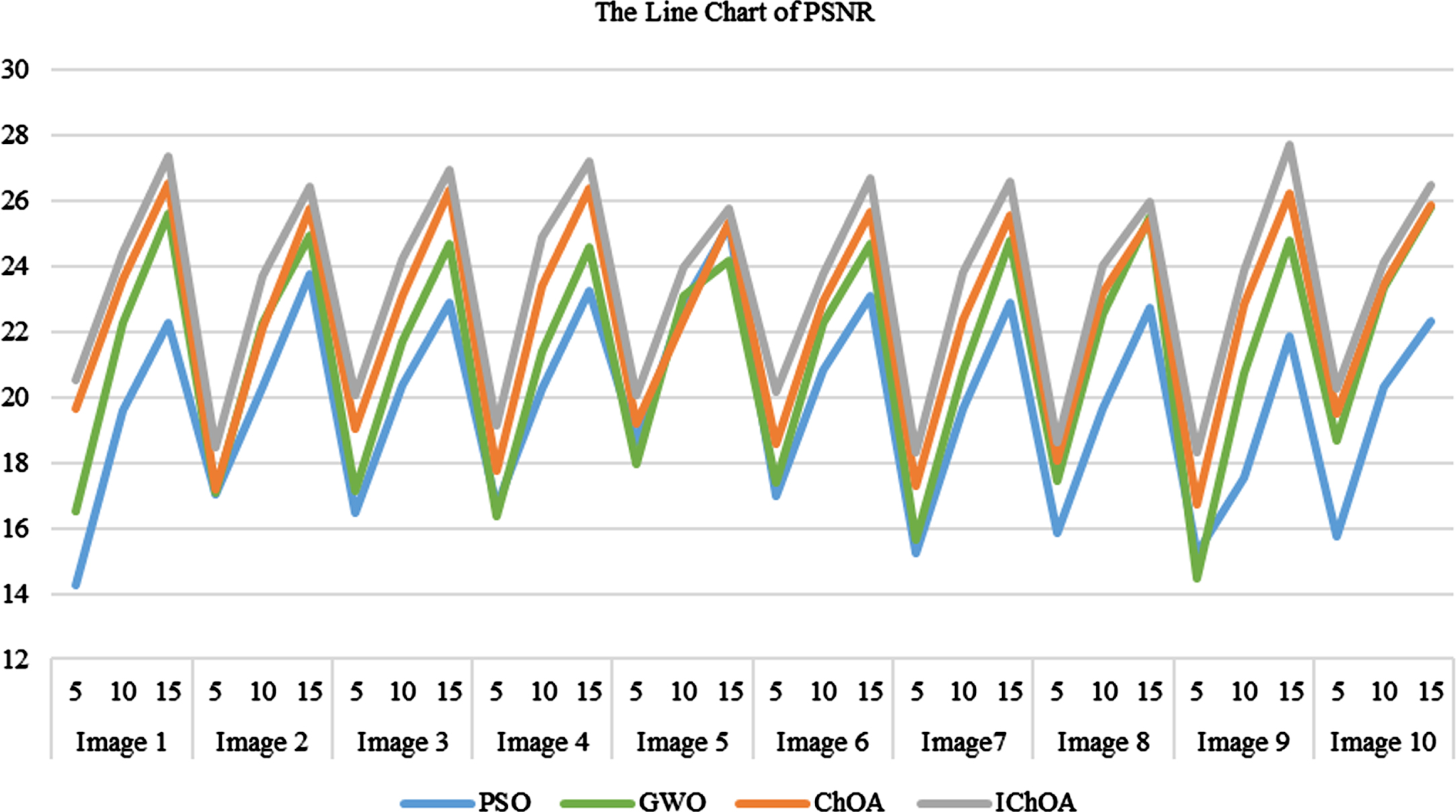
Average of the PSNR values of all algorithms.
The results of FSIM values are shown in Table 9. As presented in the table, it is not difficult to see that the IChOA performs perfectly in feature similarity. There are 30 experiments and IChOA achieved 96.67% of the best cases. Figure 13 shows the average of the FSIM values for all algorithms.
The FSIM of each algorithm under Kapur’s entropy
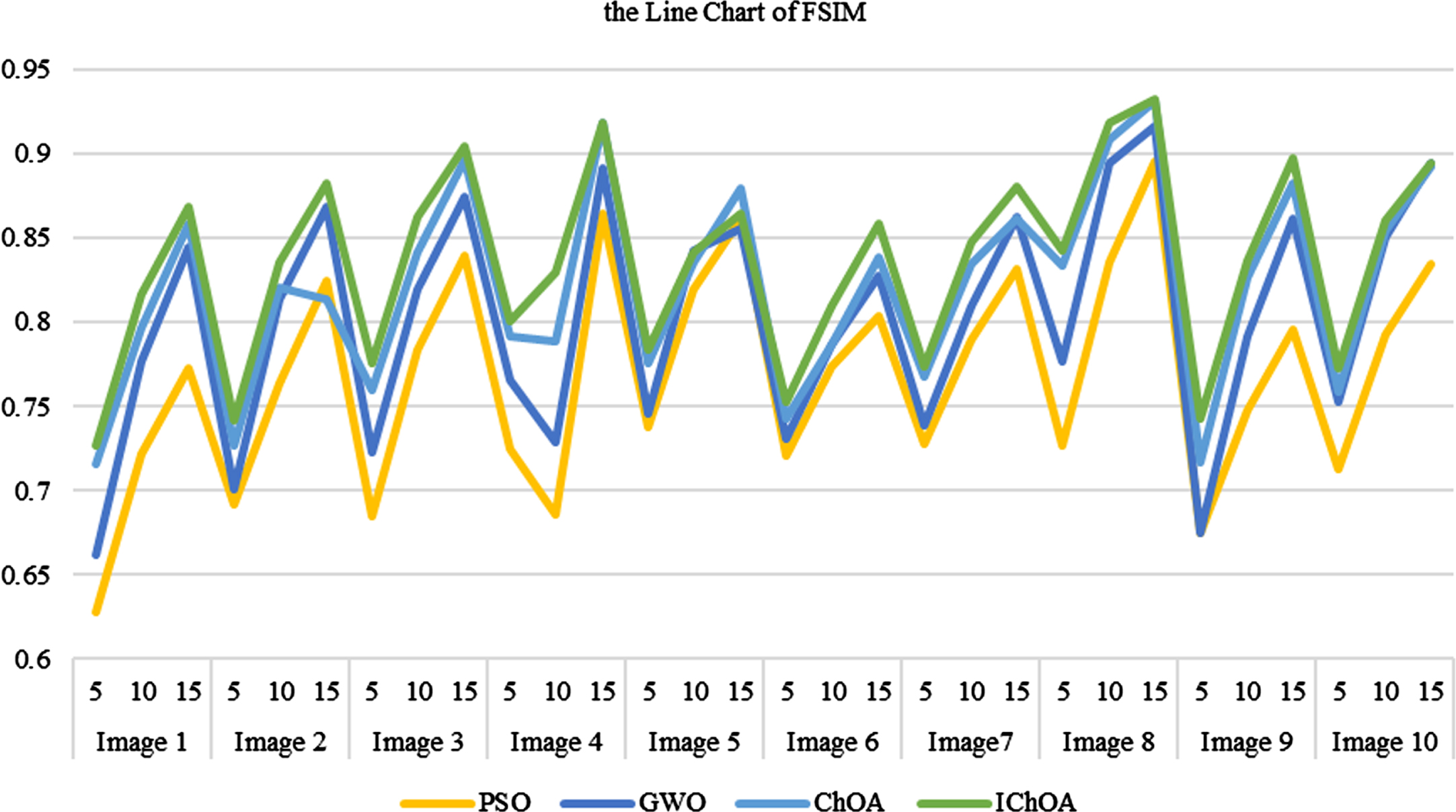
Average of the FSIM values of all algorithms.

The segmented images for IChOA.
From the experimental results in the above tables, we can conclude that the SSIM, FSIM, and PSNR values gradually increase with the increment of the threshold value. The SSIM, FSIM and PSNR indexes of the segmented image based on IChOA show obvious advantages compared with other algorithms. In most of the problems, our method obtains better solutions, which indicates that the IChOA segmentation-based images have less distortion and are more similar to the original images in terms of brightness, contrast, feature similarity and structural phase. The results of this experiment validate the superiority of IChOA from another perspective.
In order to evaluate IChOA more comprehensively, Table 10 gives the computation time for test Image 3, Image 4 and Image 6. According to the calculation time in the table, as the number of thresholds increases, the calculation time of the image gradually increases, and the increased duration is about 0.3s∼0.4 s. Comparing the computation time of IChOA and ChOA, the computation time of IChOA is slightly longer than ChOA’s. The reason for this phenomenon is that the traditional ChOA tends to fall into the local optimum, which leads to premature convergence. Although the computation time of our method is slightly longer, the accuracy of its thresholding is higher, so that a segment closer to the original image can be obtained.
Calculation time
The main factors affecting the running time of the algorithm are the way the population is initialized, the parameter f, the complexity of the experimental image, etc. In summary, the performance of IChOA is compared and analyzed in terms of the image segmentation effect. The runtime of IChOA is slightly longer than that of ChOA, but the time difference is within an acceptable range. And the image segmentation accuracy experiments from the second subsection show that the IChOA algorithm proposed in this paper has higher segmentation image accuracy, better segmentation quality, and higher algorithm stability. The comprehensive segmentation performance of IChOA algorithm is optimal by combining all indicators, thus further verifying the efficiency and correctness of IChOA in the color image segmentation problem.
A novel image segmentation algorithm-based IChOA is proposed in this study. In IChOA, the combination of Gauss chaos and reverse learning strategy is adopted to increase the population diversity. The Gauss-Cauchy mutation helps the algorithm to jump out of local optimum and avoid premature phenomenon. IChOA can adaptively regulate the development and exploration phase of the algorithm due to non-linear f. Even more noteworthy is the introduction of group experience sharing mechanism in the position update formula in IChOA, which draws lessons from the PSO algorithm. Therefore, these strategies strengthen the searchability of algorithm and prevents premature convergence efficaciously. 12 classical test functions are employed to evaluate the comprehensive performance of IChOA. Both qualitative and quantitative methods are used to confirm the validity and stability of the presented algorithm The experiment results show that IChOA outperforms other peers in terms of accuracy, stability, and convergence speed. It also has a statistically significant improvement at the same time. Eventually, an IChOA-based color image segmentation algorithm is proposed. It combines IChOA with traditional Kapur entropy. All segmentation experiments studies are carried out using images from animal, human and architecture in the Berkerly dataset. FSIM, PSNR, SSIM, Kapur entropy values and running time are applied to verify the segmented images’ quality. These indicators indicate that the proposed method exhibits excellent presentation on various image segmentation problems with strong effectiveness. However, there is no algorithm to resolve all optimization problems, specific optimization problems can be solved using algorithms by enhancing them or combining them with other technologies.
For future work, we will mainly continue to use IChOA in conjunction with different entropy methods for multi-threshold segmentation of other specific images, such as satellite images and medical images. In addition, IChOA can also be applied to real world engineering problems like structural optimization, support vector machine hyperparameter optimization, and artificial neural network optimization.
Footnotes
Acknowledgment
This work was funded by the National Natural Science Foundation of China (31370710), Fundamental Research Funds of Central Universities (2572018BF02), Forestry Science and Technology Extension Project (2016[![]() ]), the 948 Project from the Ministry of Forestry of China (2014-4-46) and the Postdoctoral Research Fund of Heilongjiang Province (LBH-Q13007).
]), the 948 Project from the Ministry of Forestry of China (2014-4-46) and the Postdoctoral Research Fund of Heilongjiang Province (LBH-Q13007).