
Abstract
This paper extends the traditional multifactor population model from a probabilistic background to an uncertain background, allowing us to better account for the fact that the birth and death rates are sometimes affected by different, independent uncertain noises. The theory of multifactor uncertain differential equation is applied to analyze the novel model. First, a multifactor uncertain population model is developed and the solution of the model is obtained. Secondly, the stability in measure and stability in distribution of the multifactor uncertain population model are studied respectively, and the relationship between the two kinds of stability is further discussed. Then, a method of moment estimation based on residuals is proposed for the unknown parameters in the multifactor uncertain population model. Finally, an example is given to illustrate the validity and rationality of the parameter estimation method.
Introduction
Population model has important application value in the study of population dynamic behavior. Their origin can be traced back to the Malthus growth model [1], which opened the door of deterministic population model described by ordinary differential equation. However, the population system is inevitably affected by all kinds of noises. Then some researchers used random noise described by Wiener process to establish random population models [2]. Next some scholars extended the random model to the multifactor random population model. For example, Hakoyama et al. [3] studied the influence of environmental stochasticity and demographic stochasticity on population extinction. Subsequently, Hill et al. [4] extended the multifactor random population model to the case of two patches.
Although random population models have been widely used in practice, the premise of applying random models is that the probability distribution function of the event is close enough to the actual frequency of the event, that is, the large number theorem must be satisfied. In practice, for economic and technical reasons, sometimes there is no sample data, so only domain experts can be relied on to estimate the probability of an event and give its reliability. Meanwhile, due to the properties of the Wiener process, random population models are inconsistent in describing many time-varying population systems, which was discussed in detail in Zhang and Yang [5]. Therefore, it is not appropriate to use stochastic differential equation to describe the dynamic behavior of population. In order to better describe the various noises in the process of biological population dynamics, new methods need to be considered.
In 2007, Liu proposed uncertainty theory [6] to solve the paradoxes in random models. Uncertainty theory is a branch of mathematics on which reliability models can be built. In order to describe the uncertainty phenomenon changing with time, Liu [7] introduced the uncertain process. Liu process is not only an uncertain process, but also a stationary and independent incremental process with continuous Lipchitz sample path. Unlike random differential equations driven by random processes, uncertain differential equations are driven by uncertain processes. In recent years, uncertain differential equation has become the main tool to deal with dynamic uncertain systems and has achieved fruitful results. Yao [8] studied the first hitting time and extreme value of solution for uncertain differential equations. Barbacioru [9] proposed uncertain delay differential equation. Subsequently, Ge and Zhu [10] used the Banach fixed point theorem to discuss the existence and uniqueness theorem of the solution for uncertain delay differential equations. The backward uncertain differential equation was proposed by Ge and Zhu [11] and it is to study how to set the path for the system to achieve the expected goal under uncertain environment. Yao [12] considered uncertain differential equations with jumps. Zhu [13] explored uncertain fractional differential equations and applied them to the study of interest rates. Li et al. [14] established a class of multifactor uncertain differential equations. Yao [15] discussed higher-order uncertain differential equation. Uncertainty theory was widely used in uncertain planning [16], uncertain reliability analysis [17], uncertain finance [18] and other fields.
Since the factors affecting the population dynamic system in practice usually do not exist separately, the birth rate and death rate are sometimes interfered by different and independent uncertain noises at the same time. Therefore, this paper extends the traditional multifactor population model from a probabilistic background to an uncertain background, and proposes a multifactor uncertain population model which is described by a multifactor uncertain differential equation and in which the birth rate and death rate are disturbed by two independent uncertain variables. The theory of multifactor uncertain differential equation is applied to analyze the novel model.
The rest is arranged as follows. In Section 2, a multifactor uncertain population model is developed, and the solution and α-path of the solution are obtained. In Section 3, it is proved that when t falls on a finite interval, the stability in distribution can be derived from stability in measure for multifactor uncertain population model. In section 4, the moment estimation method based on residuals is used to estimate the unknown parameters in the multifactor uncertain population model. Section 5 shows our parameter estimation method in detail by applying it to real data sets. Finally, a brief summary is given in Section 6.
Multifactor uncertain population model
Suppose b and d are the birth and death rates of the population, and they are constants. A simple model of population growth is the Malthus population model
Intraspecial competition is a common relationship in biology. Considering density limitation and crowding effect, a density constraint factor
Next, some scholars have extended the random model to the multifactor random population model. For example, considering the influence of environmental stochasticity and demographic stochasticity on population extinction, Hakoyama et al. [3] studied the multifactor stochastic differential equation
Subsequently, Hill et al. [4] extended model (2.4) to the case of two patches and obtained the multifactor random population model is as follows
These multifactor stochastic differential equation models describe the dynamic behavior of populations disturbed simultaneously by multiple random noises. But in the real world, uncertainty noise is everywhere. Uncertain factors influencing the population dynamic system are usually not alone, and sometimes the birth rate and death rate are affected simultaneously by different and independent uncertain factors. For example, the increase in the death rate due to an unexpected frost or a sudden infectious disease is accompanied by the increase in the birth rate as a result of the implementation of government policies to encourage childbearing.
In this case, it is more accurate to add two independent perturbations to the birth rate and death rate respectively than to add only an uncertain perturbation to the population growth rate. So we add two independent uncertain noises to the birth rate and death rate respectively as follows
The novel multifactor uncertain population model (2.8) is characterized by a multifactor uncertain differential equation, which extends the traditional multifactor population model from a probability background to an uncertain one, and explains that sometimes the birth and death rates are affected by different and independent uncertain noises. It provides a new way to study the dynamic behavior of populations, and offers a new idea for the exploration of population models in the future.
Next, we will further discuss the distribution function of the solution for the multifactor uncertain population model.
According to the fundamental theorem of uncertain calculus, we have
Then
Therefore, the multifactor uncertain population model (2.8) has a solution (2.9).
According to the monotonicity of the uncertain measure, there is
From the duality axiom, we get
It follows that
Thus
The stability of multifactor uncertain population model is important in practical application. If the model is stable, the uncertain dynamic population system is not sensitive to small fluctuations in the initial value and will not cause significant effects. If the model is unstable, a little change in the initial value will result in a significant difference in the behavior of the solution over time.
Zhang [20] focused on the stability in measure and the stability in mean of multifactor uncertain differential equation. Ma [21] discussed the concept of stability in p-th moment for multifactor uncertain differential equation and documents its application. Sheng [22] presented a concept of the almost sure stability of multifactor uncertain differential equation. Ma [23] introduced the stability in distribution for multifactor uncertain differential equation and proved a sufficient condition for a multifactor uncertain differential equation being stable in distribution. This section discusses the stability in measure and the stability in distribution for multifactor uncertain population model, and further explores the relationship between the two kinds of stability.
Zhang [20] gived the definition of stability in measure for multifactor uncertain differential equations when t ⩾ 0. By the definition, it can be proved that the multifactor uncertain population model is unstable. In practice, however, this model is usually used when t is a finite number. Therefore, the definition of stability in measure for multifactor uncertain differential equation when t is on a finite interval is given below.
According to Definition 3.1, the multifactor uncertain population model is stable in measure.
Ma [23] gave the definition of stability in distribution for multifactor uncertain differential equation when t ⩾ 0. According to the definition, it can be proved that the multifactor uncertain population model is unstable in distribution. Considering that the model is usually used when t is a finite number, the following is the definition of stability in distribution for multifactor uncertain differential equations when t is on a finite interval.
and
whose inverse uncertainty distributions are
When |X0 - Y0| → 0 and 0 ⩽ t ⩽ T, there is
According to Definition 3.2, the multifactor uncertain population model is stable in distribution.
for each given real number ɛ > 0. Suppose x is any given real number, for any y > x. Then
According to the monotonicity theorem and subadditivity axiom, it can be obtained
Since
Let y → x+, we obtain
For any z < x, we get
From the monotonicity theorem and subadditivity axiom, we can get
Since
as
we have
for any z < x.
Let z → x-, we obtain
By in equation (3.9) and (3.10), we get
It follows that
From Definition 3.2, the multifactor uncertain population model is stable in distribution.
How to estimate unknown parameters based on some observed data is a key problem in the practical application of the multifactor uncertain population model. Liu and Liu [24] proposed the concept of residual of uncertain differential equations. The parameter estimation methods based on residuals are different from the parameter estimation methods based on difference scheme, and they are suitable when the observation time intervals are not short enough. In multifactor uncertain population model, r, σ1 and σ2 are unknown parameters. In this section, we define the residual of the multifactor uncertain differential equations, and use a method of moments based on residuals to estimate the unknown parameters.
Assume
So Φ t i (N t i ) is always going to be a linear uncertain variable. Substitute N t i with the observed value n t i , and write
Then ɛ i is the sample of linear uncertainty distribution L (0, 1).
We obtain the uncertainty distribution of N t i as follows,
It follows from definition 4.1, that the ith residual is
In order to calculate unknown parameters more conveniently, we can let ν1 be the weight of unknown parameter σ1 and ν2 be the weight of unknown parameter σ2 satisfying ν1 + ν2 = 1. Then we replace every unknown parameter σ1 and σ2 with ν1σ1 + ν2σ2. So the multifactor uncertain population model can be approximately written as
We solve the updated multifactor uncertain population model and obtain the uncertainty distribution of N t i as follows,
For i = 2, 3, ⋯ , n, we obtain n - 1 residuals of
For each positive integer k, the kth sample moment of the n - 1 residuals ɛ2, ɛ3, ⋯ , ɛ n is
Since the number of unknown parameters is 3 and the first three moments of the linear uncertainty distribution L (0, 1) are 1/ - 2, 1/ - 3, and 1/ - 4, according to the work of Liu and Liu [24], the moment estimation of (r, σ1, σ2) is the solution of the system of equations (4.13),
In order to test whether the multifactor uncertain population model (4.7) fits the observed data (4.1), we need to test whether the linear uncertainty distribution L (0, 1) fits the n - 1 residuals. Therefore, Ye and Liu [25] suggested uncertain hypothesis testing. Given a significance level α, the test is
If the vector of the n - 1 residuals ɛ2, ɛ3, ⋯ , ɛ
n
belongs to the test W, i.e.,
then the multifactor uncertain population model (4.7) is not a good fit to the observed data (4.1). If
then the multifactor uncertain population model fits the observed data (4.1) well.
In order to further stimulate the application of the multifactor uncertain population model, this section models the American population by multifactor uncertain population model. Table 1 shows the demographic data of the United States from 1790 to 2000. Denote the year from 1790 to 2000 by i = 1, 2, ⋯ , 22, and let N t i represent the American population in Table 1 and Fig. 1.
American populations (millions) from 1790 to 2000
American populations (millions) from 1790 to 2000
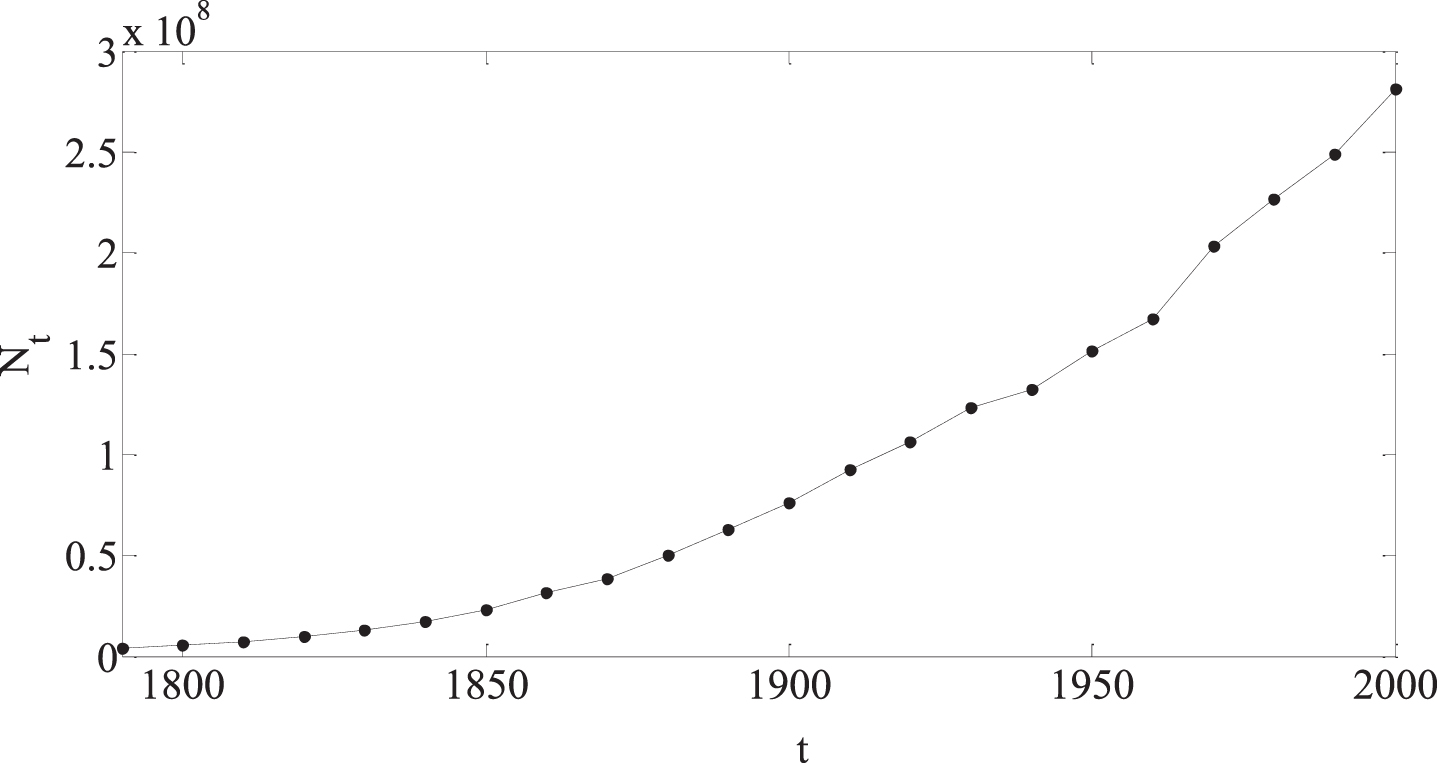
The American populations from 1790 to 2000.
Assume N
t
is an uncertain process and follows the multifactor uncertain population model
There are three parameters r, σ1 and σ2 to be estimated. Let
Use the equation (4.13), we get the following equations
Solving the above system of equations, we obtain
Thus we obtain the multifactor uncertain population model
Substituting r, σ1 and σ2 into (4.9), we can get 21 residuals ɛ2, ɛ3, ⋯, ɛ22 of the multifactor uncertain population model corresponding to the American populations. See Fig. 2.
We divide the 21 residuals into two parts, i.e.,
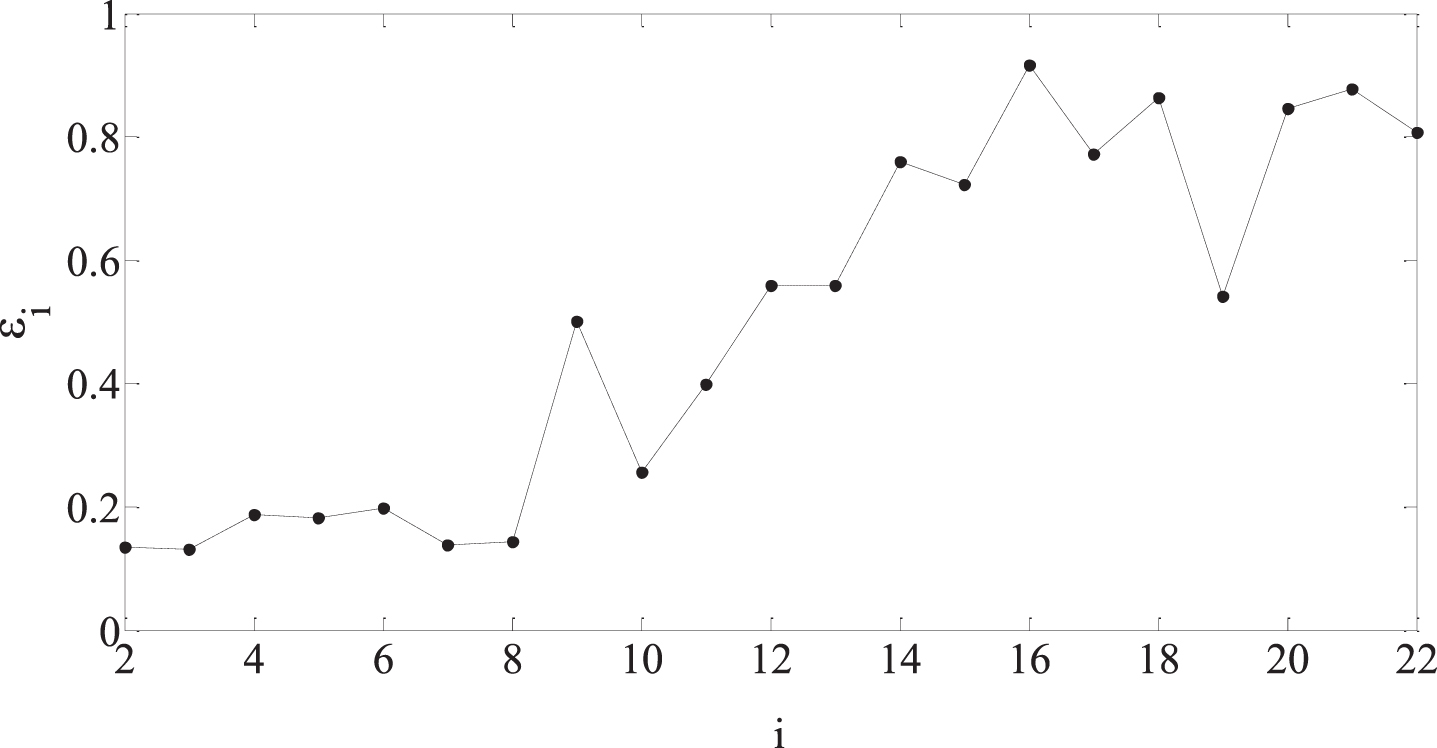
Residual plot corresponding to American populations.
By the two-sample Kolmogorov-Smirnov test, it is shown that the two parts in the above residuals do not come from the same population. So the residuals ɛ2, ɛ3, ⋯ , ɛ22 are not white noise in the sense of probability theory. This is why we use uncertain differential equation instead of stochastic differential equation.
Finally, let us test whether the multifactor uncertain population model fits American populations n
t
1
, n
t
2
, ⋯ , n
t
22
. Given a significance level α = 0.05, it follows from α × 21 = 1.05 and the test is
Since all residuals are in [0.025, 0.975], we have ɛ2, ɛ3, ⋯ , ɛ22 ∉ W. Thus the multifactor uncertain population model is a good fit to the American populations.
Noting the paradox of stochastic population models, this paper develops a multifactor uncertain population model based on a multifactor uncertain differential equation to better describe the fact that the birth and death rates are sometimes affected by different, independent uncertain noises. It broadens the application of uncertain differential equations in the field of population. First, the inverse uncertainty distribution of the solution for the multifactor uncertain population model is obtained. Secondly, applying the uncertainty analysis method, the stability in measure and stability in distribution of the multifactor uncertain population model are studied respectively, and the relationship between the two kinds of stability is further discussed. Then, a method of moment estimation based on residuals for unknown parameters in the multifactor uncertain population model is derived. Finally, a numerical example related to American population from 1790 to 2000 is given to verify the validity and rationality of our parameter estimation method.
Footnotes
Acknowledgments
This research is supported by Fundamental Research Program of Shanxi Province Scientific No. 20210302124310 and Basic Research Foundation of Shanxi Datong University No. 2022K24.