
Abstract
As significant carriers of the application of fuzzy set theories, fuzzy systems have been widely used in many fields. However, selecting fuzzifications, fuzzy reasoning engines, and defuzzifications is subjective for Mamdani fuzzy systems, and the fuzzy rule of Takagi-Sugeno-Kang fuzzy systems is less of a linguistic interpretation. Regarding these shortcomings, this paper proposes a fuzzy system based on vague partitions processing information directly from the fuzzy rule base, in which fuzzy rules have explicit semantics. Firstly, the n-dimensional vague partition of the n-dimensional universe is defined based on 1-dimensional vague partitions and the aggregation function, and its properties are discussed. Based on these, we design the new fuzzy system, and investigate its approximation properties which is the theoretical guarantee for applying the fuzzy system. As an application, we combine the fuzzy system with PID control system to deal with autonomous vehicle path tracking control problems. A series of experiments are constructed, and experimental results indicate that the fuzzy system based on vague partitions makes the fuzzy PID control system strong robustness, and has obvious advantages compared with other traditional fuzzy systems for path tracking control problems.
Introduction
As an intersectional field of robot technology and artificial intelligence technology, the automation of intelligent vehicles has attracted much attention in recent years. In this field, fuzzy set theory introduced by Zadeh [1 plays an important role. Fuzzy systems (FSs) are significant carriers of applying fuzzy set theories in autonomous vehicles 2-6].
Mamdani FS [7] is one of the most widely used FSs. The structure of Mamdani FS consists of fuzzification, defuzzification, fuzzy rule base, and fuzzy reasoning engine, where the fuzzy rule base is the core of the FS. For designing a FS, constructing membership functions on the input and output universe of discourses is a fundamental work. Thus, many scholars focus on the influence of different membership functions on the approximation ability of FSs. Zeng and Singh [8, 9] used triangular and trapezoidal membership functions as fuzzifications and investigated approximation properties of this FS. Chen and Gang [10] proposed the FS with cosine and quadratic polynomial membership functions, as well as discussed its universal approximation property and approximation accuracy. Yuan et al. [11] proposed parameter single fuzzification, and showed first-order and second-order accuracy of FS with this fuzzification. Subsequently, Jiang and Yuan [12] designed a FS with pyramid membership functions constructed on two dimensions to deal with multi-input single-output (MISO) problems. The fuzzy reasoning engine is a decision making logic that outputs the fuzzy set corresponding to the fuzzy input of the FS based on the fuzzy rule base. There have existed many alternative fuzzy reasoning methods available which can be used in FSs, and listed as follows. In 1973, Zadeh [13] proposed the famous compositional rule of inference (CRI) method to solve fuzzy modus ponens problems. However, this method lacks a strict logical basis. To compensate for the deficiency, Wang [14] proposed the triple I(3I) method. Subsequently, scholars researched this method in-depth [15-18]. Nerveless, neither CRI method nor 3I method has unconditional reducibility, where reducibility is a significant index to evaluate the deterioration of fuzzy inference. Therefore, subsethood infer subsethood algorithms [19] were proposed that satisfy the unconditional reducibility. With the continuous development of fuzzy set theory, scholars have improved fuzzy reasoning methods [20-22] from different perspectives. For the fuzzy set output from the fuzzy reasoning engine, defuzzification converts the fuzzy set to a crisp output. Up to now, there are four widely used types of defuzzifications: max-membership, centroid, weighted-average, and mean-max [24]. Although the fuzzifications, fuzzy reasoning methods, and defuzzifications listed proceeding have been successfully applied to various FSs, the selection of fuzzifications, fuzzy reasoning methods, and defuzzifications is still subjective when designing FSs. This leads to less objective results. Therefore, designing a FS that does not rely on fuzzifications, fuzzy reasoning methods, and defuzzifications is one of the motivations of this paper.
Takagi-Sugeno-Kang fuzzy system (TSK-FS) [25, 26] is another widely used FS. For this system, polynomials are used as the rule consequences, and then crisp outputs can be produced directly. Based on this characteristic, TSK-FS designed from data is computationally efficient and numerically accurate. Therefore, many TSK-FSs have been constructed. For example, Kukolj [27] constructed an adaptive fuzzy models generated by the training algorithms, Rezaee and Zarandi [28] designed a first order TSK-FS that can obtain the fuzzy rules without any assumption about the structure, Deng et al. [29] developed a scalable TSK-FS to deal with very large dates, Khater et al. [30] proposed an adaptive interval type-2 TSK-FS based on inforcement learning. Additionally, these TSK-FSs have been successfully applied in several fields such as medicine, engineer, transportation, etc [31-33]. Although improvements have been made in TSK-FSs, its shortcoming that the fuzzy rule of it can not offer linguistic interpretation still exists. Therefore, designing a FS that preserves the advantage of TSK-TSs processing information directly from fuzzy rule base, while also offering linguistic fuzzy rules is another motivation of this paper.
In order to design the desired FS, we first make vague partitions (VPs) for the input and output universes. Until now, different VP methods [34-40] have emerged. We choose the method proposed in [34, 35]. There are three reasons for us to choose this method. One is that Pan and Xu introduced the axiomatic definition of fuzzy sets based on VPs in [34, 35], which is an axiomatic system to govern membership degrees. Then fuzzy phenomena can be understood and described by axiomatic fuzzy sets. Another one is that, based on this VP, the fuzzy rule base is complete naturally. Additionally, if the fuzzy rule based on VPs is consistent, then the fuzzy rule base can be regarded as a mapping between two VPs. Furthermore, the crisp output for correspondingly crisp input can be obtained from the mapping between two VPs. The last one is that Shen et al. [41] introduced five typical VPs that improve the approximation ability of the single-input single-output (SISO) FS. If the input universe is n-dimensional, then aggregation functions [42] are employed to construct a n-dimensional VP on the input universe. Moreover, some properties of the 1-dimensional VP are preserved in the n-dimensional VP if appropriate aggregation functions are chosen.
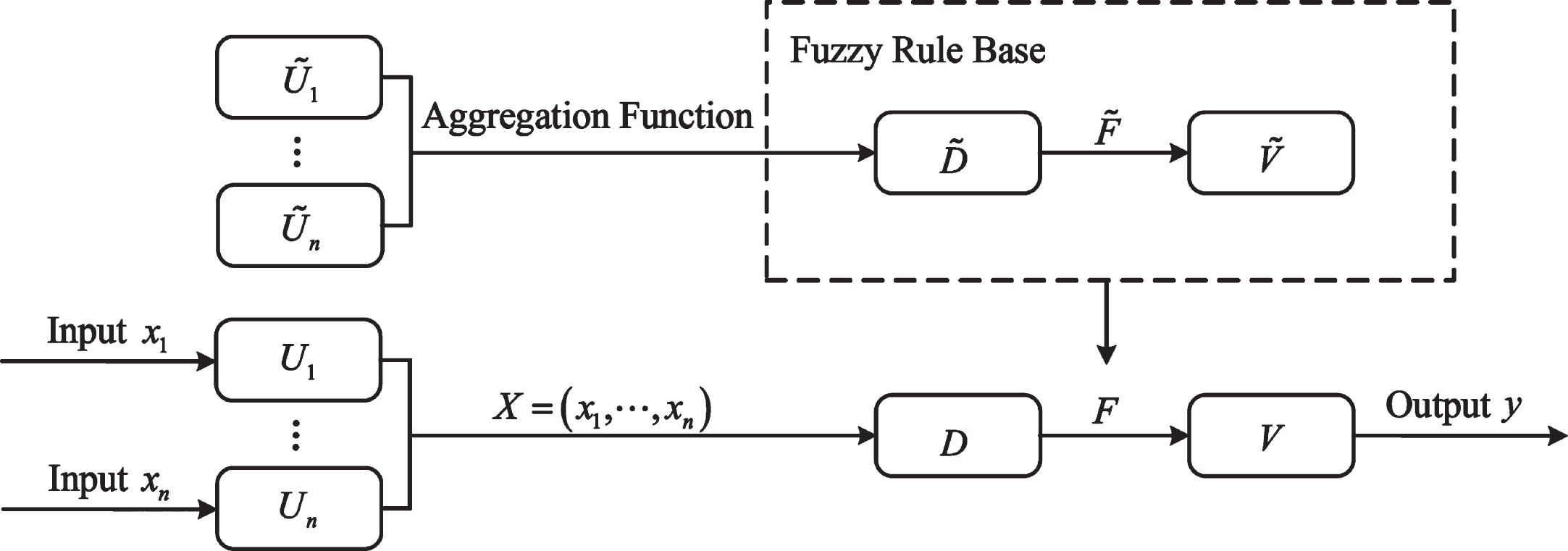
Based on the above statements, the fuzzy system based on vague partitions (FS-VPs) for MISO model is proposed in this paper. For the proposed FS, it employs a fuzzy rule base to process information directly, and then a concise algorithm calculating the crisp output for the corresponding crisp input is given. Experiments in application to path tracking control for autonomous vehicles are constructed, and the results illustrate that the proposed FS performance better than some widely used FSs.
The main contributions of this paper are stated as below: As a theoretical basis of the FS, the n-dimensional VP is defined and its properties with respect to aggregation functions are discussed. The FS-VPs is proposed, which can process information directly from the fuzzy rule base. Compared with Mamdani FS, its structure is more straightforward. Compared with TSK-FS, its fuzzy rules have precise semantics. Furthermore, the algorithm calculating the crisp output for the corresponding crisp input is given. As an application, the proposed FS is employed as a component in a fuzzy PID control system to deal with path tracking control problems for autonomous vehicles. A series of comparative experiments are conducted. These experimental results illustrate that the proposed FSs with discontinuous aggregation functions make the fuzzy PID control systems more robust than the fuzzy PID control systems consisting of existing FSs, and the proposed FSs with appropriate VPs and aggregation functions make the fuzzy PID control systems perform better than the fuzzy PID control systems consisting of existing FSs to tracking six basic elementary paths and complex paths.
The remaining content of this paper is organized as follows. Some concepts related to this study are briefly reviewed in Section 2. In Section 3, the n-dimensional VP of the n-dimensional universe is defined based on aggregation functions and 1-dimensional VPs, and some properties of n-dimensional are discussed. Section 4 displays the design process of the new FS, and its approximation properties are discussed theoretically. Experimental design and analysis of path tracking control for autonomous vehicles are presented in Section 5. Section 6 summarizes this work and looks forward to future research.
Preliminaries
In this section, some essential concepts of VPs and aggregation functions are recalled making the article more fluent, and detailed descriptions can be found in [35, 47].
1-dimensional VP
In the sequel, the collection of nonzero natural numbers is denoted by
for arbitrary for arbitrary for arbitrary 0 < μ
A
1
(x) + ⋯ + μ
A
m
(x) ≤1 holds for arbitrary x ∈ U.
A one-dimensional VP single-kernel if for all regular if for arbitrary x ∈ U, μ
A
1
(x) + ⋯ + μ
A
m
(x) =1.
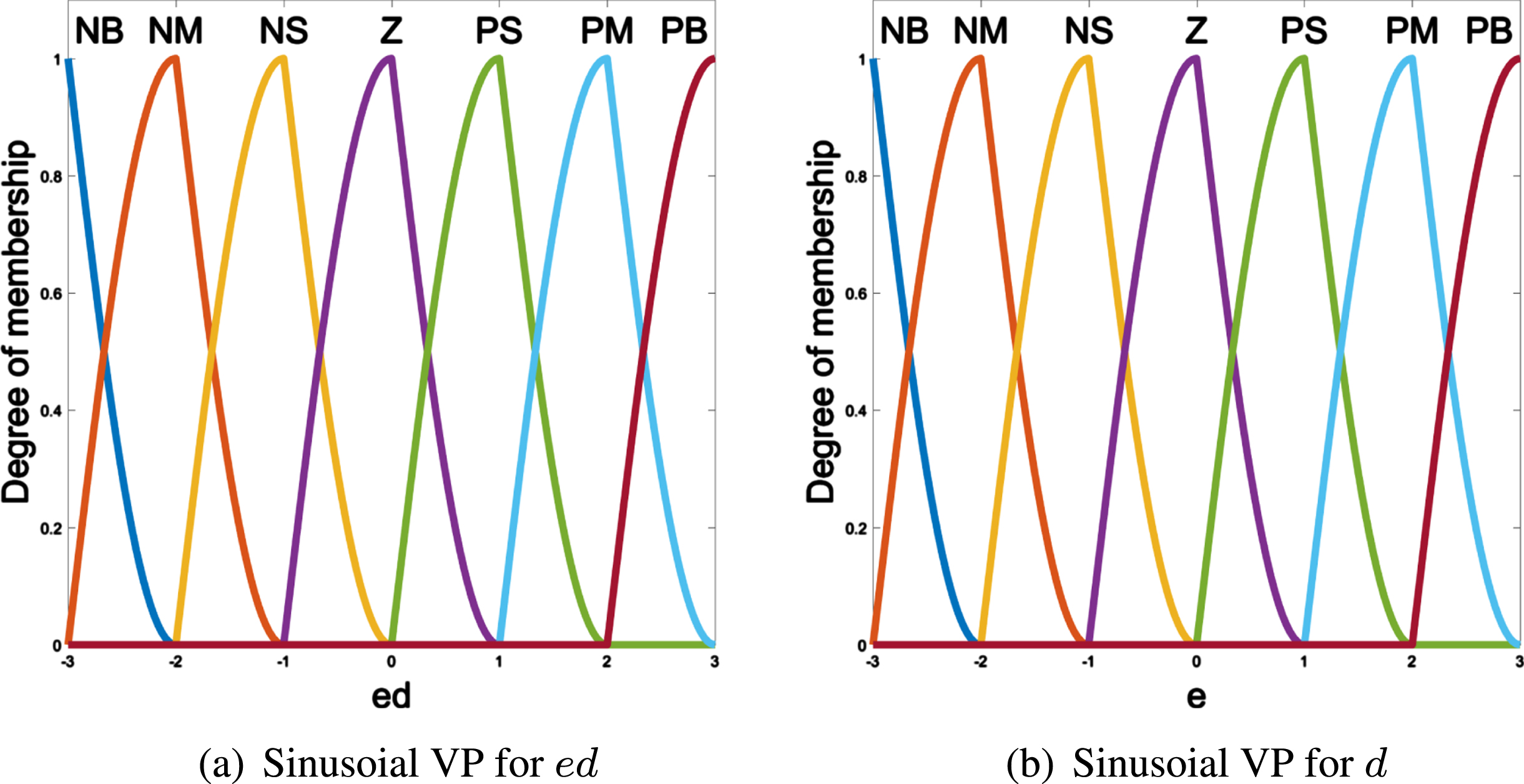
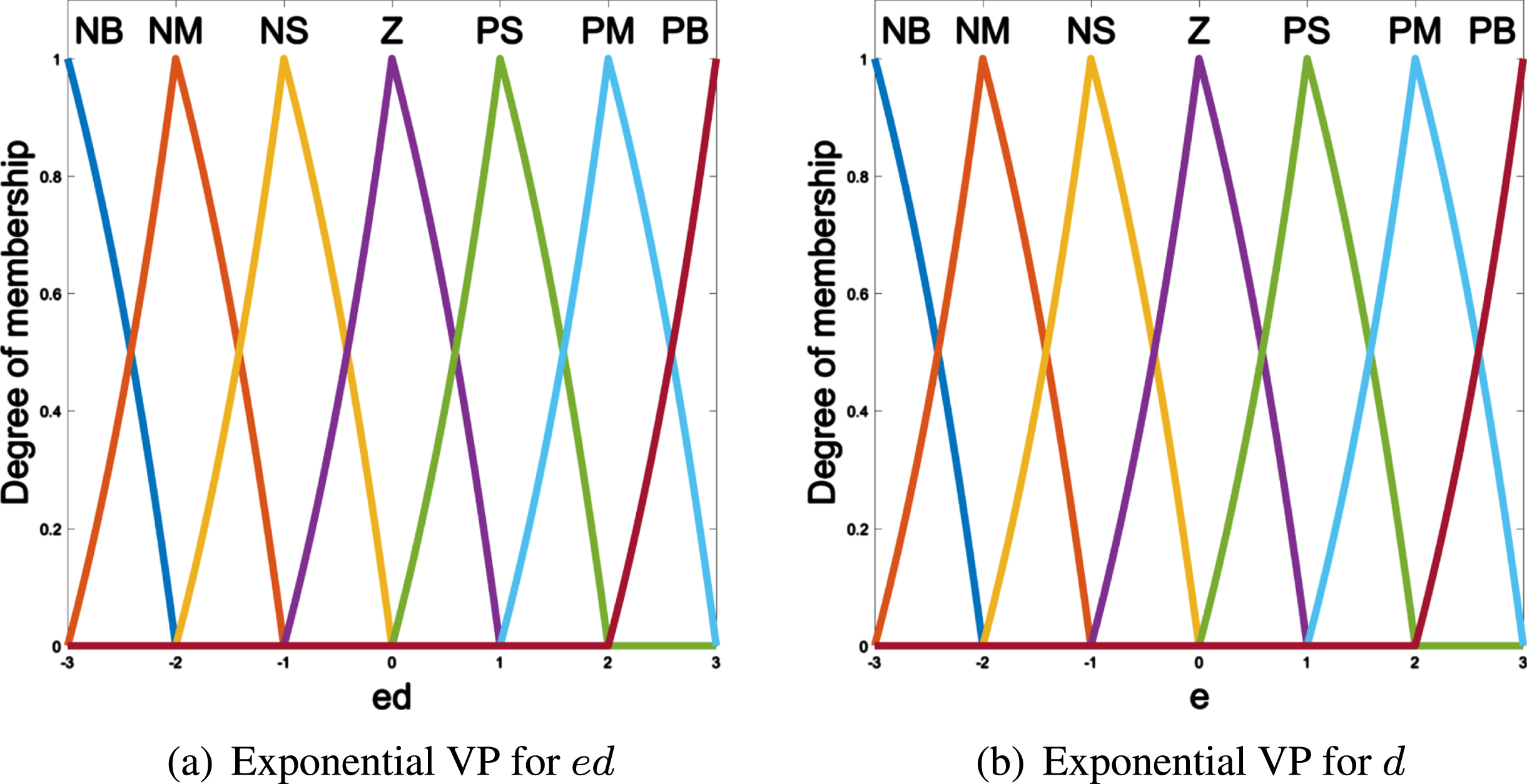
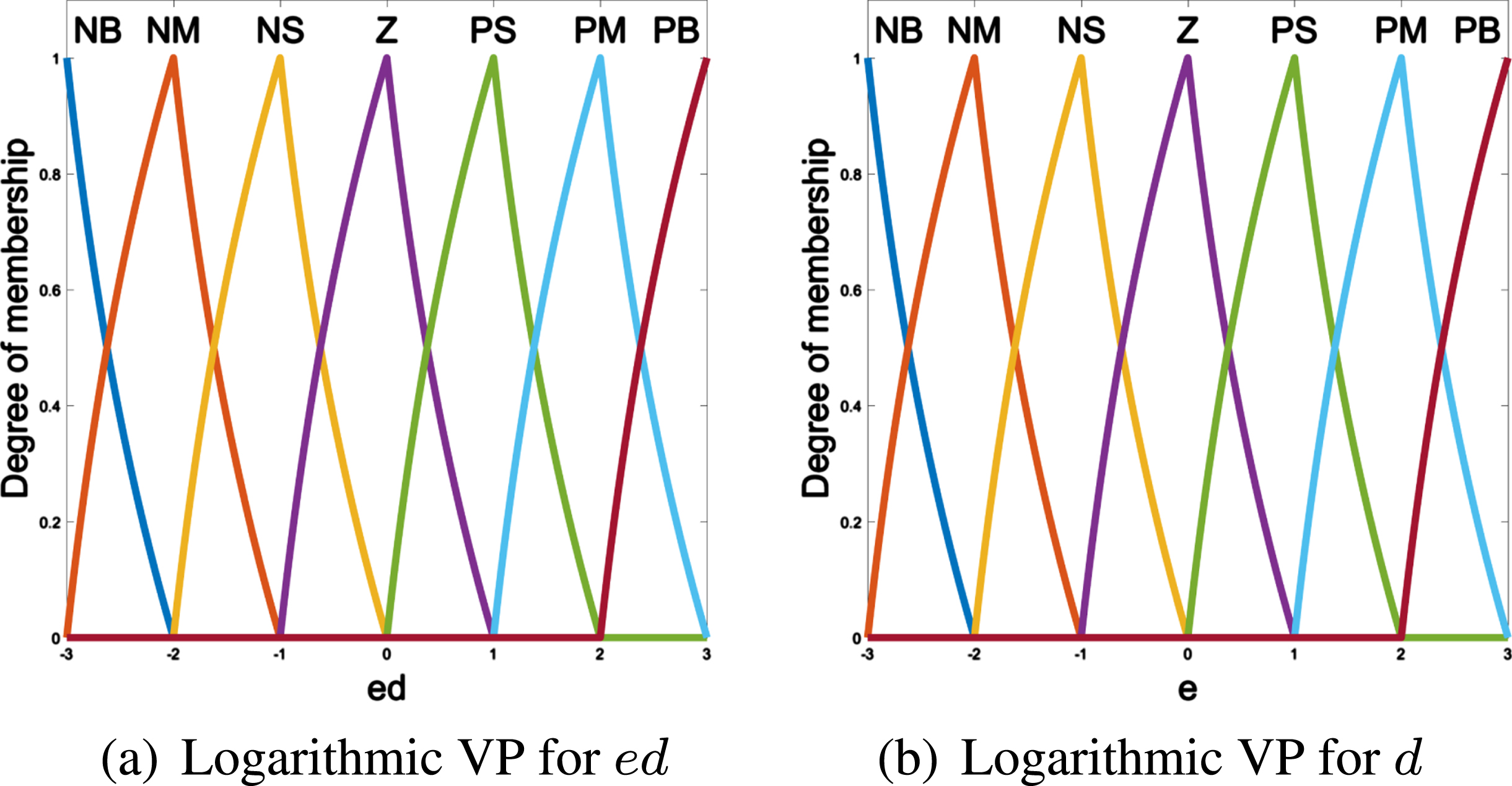
Shen et al. [41] introduced five typical 1-dimensional VPs which are single-kernel and regular: triangular VP, cosine VP, sine VP, exponential VP, and logarithmic VP. Based on the part (1) of Theorem 3.5 in [41], we have the following corollary without proof.
Aggregation functions
An aggregation function is continuous if it is continuous on each component.
T
M
(x1, x2) = min {x1, x2}. T
P
(x1, x2) = x1 · x2. T
L
(x1 . x2) = max {x1 + x2 - 1, 0}.
If e = 1, then a uninorm is a t-norm.
O (x1, ⋯ , x
n
) =0 if and only if O (x1, ⋯ , x
n
) =1 if and only if
The n-dimensional VP and its properties
In this section, we define the n-dimensional VP of the n-dimensional universe using the aggregation function to aggregate 1-dimensional VPs, and investigate its properties. Unless mentioned otherwise, we consider the 1-dimensional VP
Consider the n-dimensional universe D = U1 × ⋯ × U
n
, where
In what follows, for the convenience of writing, A I is often written as Ai1⋯i n . Concretely, we give an example to show how 1-dimensional VPs and the aggregation function determine the 2-dimensional VP.
A22, A23}, where
Next, some properties of the n-dimensional VP of D with respect to aggregation functions are discussed.
there exists at least one for any for X0 ∈ D,
□
In fact, aggregation functions illustrated in the previous section are all strictly increasing. In the rest of paper, we concern the strictly increasing aggregation functions. Also, the following corollary can be obtained from Corollary 2.2 without proof.
□
The FS-VPs and its approximation properties
In this section, we first introduce the fuzzy rule base based on VPs. Furthermore, the new FS is proposed, which can process information directly from its fuzzy rule base without fuzzication, defuzzication and fuzzy reasoning engine. At last, we discuss the approximation properties of the new FS, including universal approximation property and approximation precision.
Fuzzy rule base
Let
For a MISO model, let
We first design a SISO FS, which can process information directly from a fuzzy rule base based on VPs. Let

Basic configurations of the SISO FS.
The paper [41] analyzed the properties of
1: If x = x
i
2: f (x) = y k i ;
3: Else
4:
5:
6:
As a consequence, the SISO FS can be represented by
For the MISO FS, we employ the idea that transforms it into the SISO model by an aggregation function. Then the complete and consistent fuzzy rule base is a mapping
Basic configurations of the MISO FS.
See back to Eq. (4.4). According to Corollary 2.2 and the regularity of the 1-dimensional VP, Eq. (4.4) is equal to
1: Select an aggregation function Θ.
2: Obtain a set of fuzzy rules
3:
4: F (X) = y k I ;
5:
6:
7:
8:
As a consequence, the MISO FS can be represented by
In this part, approximation properties of the proposed FS are investigated. Before that, we discuss the interpolation property of the proposed FS.
For the proposed FS, we consider the input universe
Recall that the ∞-norm for a bounded function G (X) on the domain is
In the sequel, we prove the proposed FS is a universal approximator under the ∞-norm errors. For this end, a polynomial is introduced since it has continuous differentiable properties on its domain.
Theorem 4.4 illustrates that the proposed FS is an universal approximator. Furthermore, the following theorem show the approximation accuracy of the proposed FS.
An application to path tracking control
Path tracking control is one of the most important issues in autonomous vehicles technology. It can achieve efficient autonomous driving of vehicles and provides core technology for unmanned driving. There are several methods to realize path tracking control, including Model Predictive Control, Inverse Control, Local Optimal Control, and PID Control. This section combines the proposed FS with a PID control system to deal with path tracking problems. Firstly, the robustness of the fuzzy PID control system is discussed. Moreover, a series of comparative experiments are designed to illustrate the effectiveness and advantages of the proposed FS in a fuzzy PID control system to deal with path tracking problems.
Description of fuzzy PID control system
Proportional-integral-derivative (PID) [47] control is a type of linear control system. It obtains a control deviation e (t) from the given value r (t) and actual output value y (t). The success of the PID control system depends on selecting the appropriate parameters K p , K i , and K d , which are given by experience usually. In this subsection, we introduce a fuzzy PID control system, which employs the FSs-VPs to output the PID control parameters, and its basic configurations are shown in Fig. 3. In the fuzzy PID control system, there are three proposed FSs. The error between the actual position and predetermined, the differentiation of the error, denoted by e, ed respectively, are two inputs of these three FSs. ΔKp, ΔKi and ΔKd are outputs of these three FSs respectively. Set Kp = 0.4, Ki = 0, and Kd = 1 are the initial values of the fuzzy PID control system. Let the domain of e, ed, ΔKp, ΔKi and ΔKd be U e = [-3, 3], U ed = [-3, 3], U ΔKp = [-0.3, 0.3], U ΔKi = [-0.06, 0.06] and U ΔKd = [-3, 3] respectively. Considering the possible vehicle moving states in path tracking problems, e, ed, ΔKp, ΔKi, ΔKd can be divided into 7 categories, negative big (NB), negative middle (NM), negative small (NS). zero (ZO), positive small (PS), positive meddle (PS), positive big (PB). Based on experiences, the fuzzy rules with respect to ΔKp, ΔKi, ΔKd and e, ed are shown in Tables 1-3.
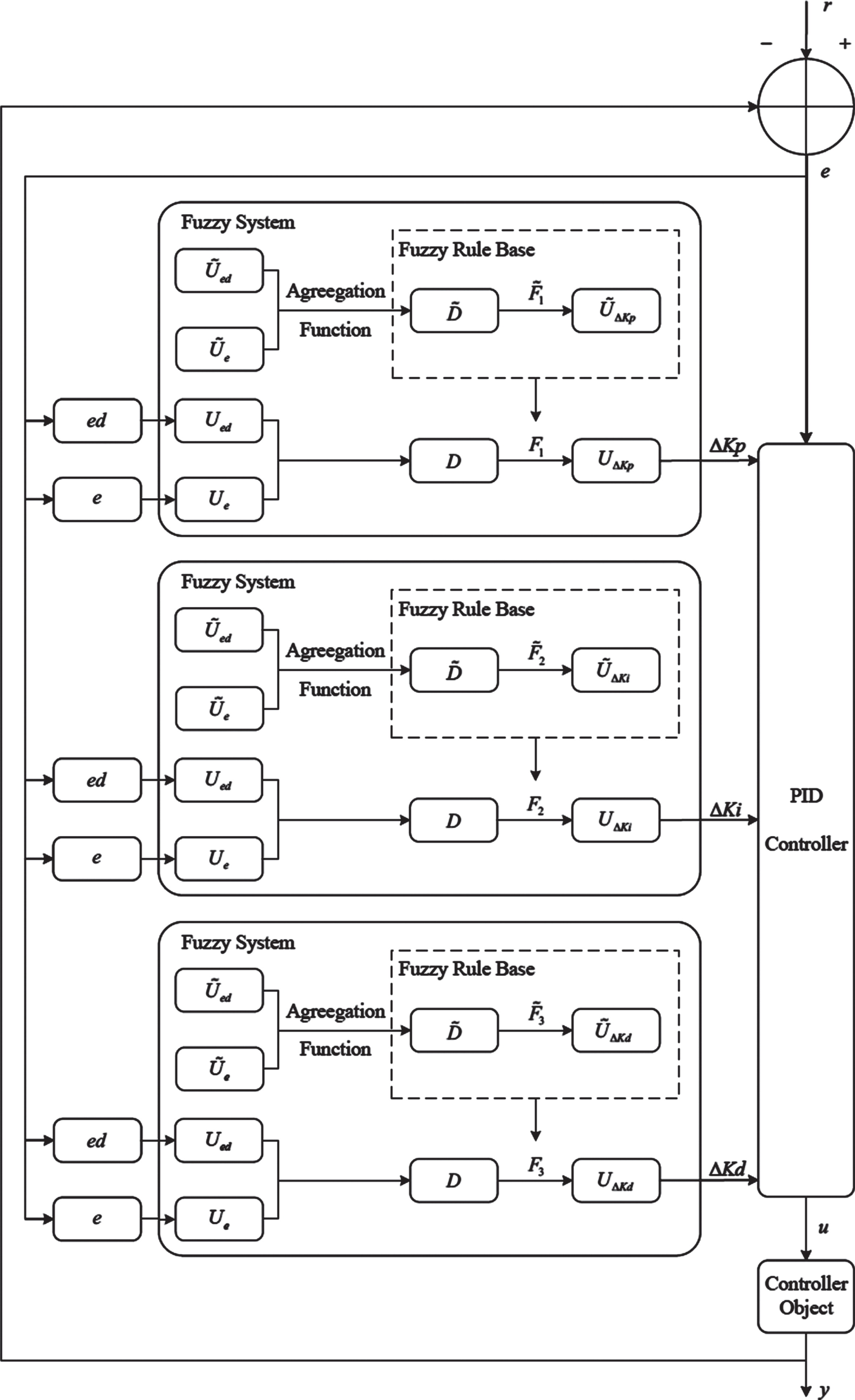
Basic structure of fuzzy PID control system.
Fuzzy rules for ΔKp
Fuzzy rules for ΔKi
Fuzzy rules for ΔKd
Robustness refers to the anti-interference ability of a control system to external factors such as parameter changes and disturbances, and it is an essential indicator for evaluating control systems. In this subsection, the controlled object is
Settling Time: It refers to the time required for the system to reach the stable state from the initial state. Settling time reflects the response speed and stability of the system. Rise Time: It refers to the time required for the system to reach the vicinity of the setpoint from the initial state. Rise time reflects the response speed of the system. Peak Time: It refers to the time at which the system response reaches the maximum deviation. Peak time reflects the oscillation performance of the system. Overshoot: It refers to the ratio of the maximum deviation (y
max
) of the system response from the setpoint (y
set
) before reaching the stable state to the set point. It is usually expressed as percentage: (y
max
- y
set
)/y
set
× 100 %. Overshoot reflects the degree of overshoot of the system, i.e., the excessive response of the system to the input signal.
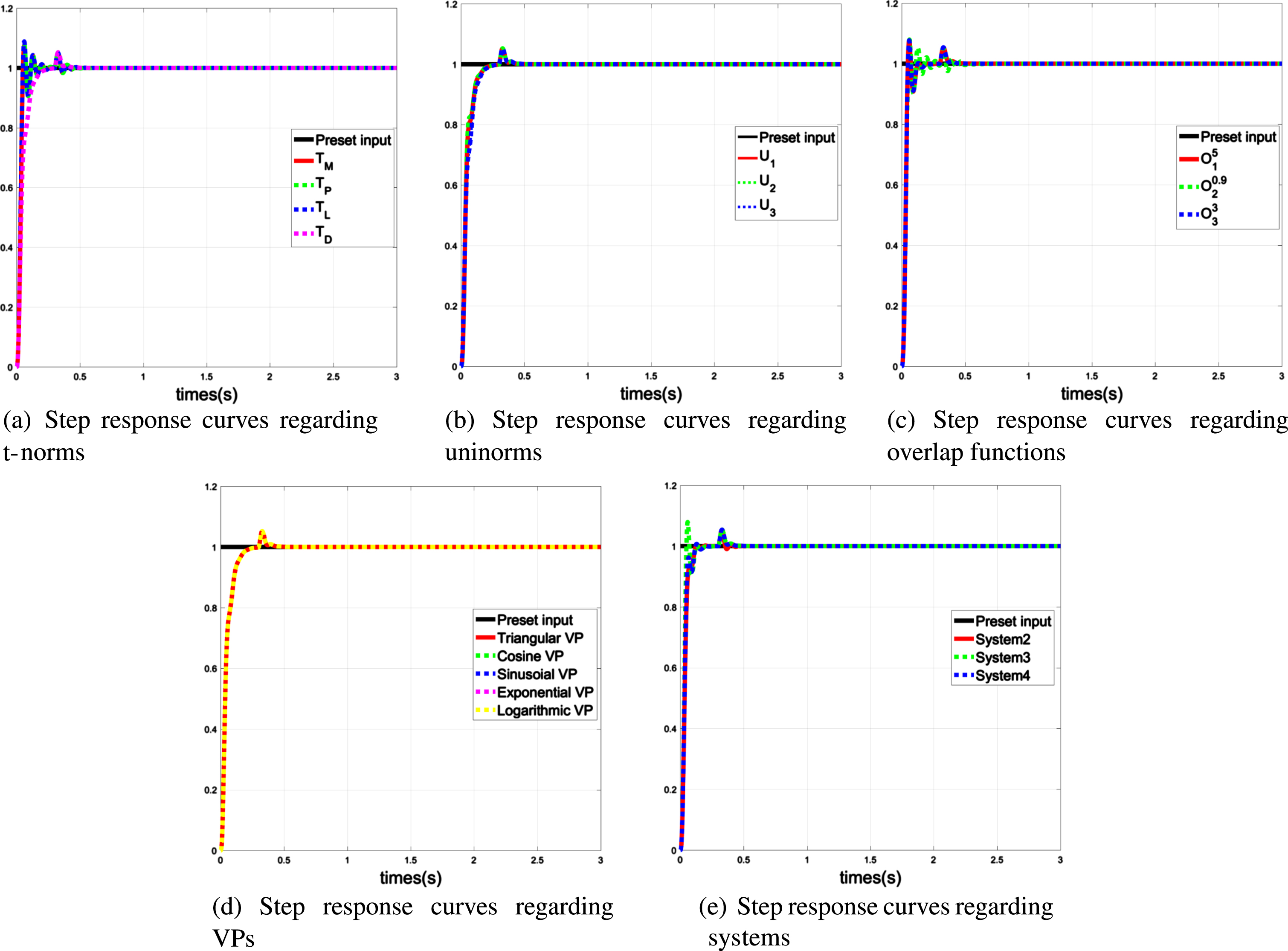
Let VPs of U e = [-3, 3] and U ed = [-3, 3] be triangular VPs shown in Fig. 4(a) and 4(b) respectively. We first investigate the influence of aggregation functions of FSs on the robustness of the fuzzy PID control system. Some simulation experiments on MATLAB are conducted, and the step response curves of the fuzzy PID control system with respect to t-norms, uninorms, and overlap functions are obtained, as shown in Fig. 11a, 11b, and 11c respectively. Secondly, we discuss the influence of types of VPs introduced in [41] on the robustness of the fuzzy PID control system. According to Eq. (4.5), it can be seen that the VP type of the consequents has no impact on the output. Therefore, we only need to discuss the impact of the VP type of the antecedent of the proposed FS on the robustness of fuzzy PID control systems. The five types of VPs of U e and U ed are shown in Figs. 4-8. This paper only discusses that types of VPs of U e and U ed are the same. In the sequel, FS with a certain type of VP refers that the VP type of fuzzy rules antecedents is that type. Set the aggregation function to be T D . Some simulation experiments are conducted on MATLAB, and the step response curves of the fuzzy PID control system with respect to five types of VPs are shown in Fig. 11d. At last, we compare the influence of the proposed FS with three widely used FSs [24] on the robustness of fuzzy PID control systems. These three FSs have fuzzifications, defizzifications, and fuzzy reasoning engines, and their configurations are shown in Table 4. Some simulation experiments are conducted on MATLAB, and the step response curves of the fuzzy PID control system with respect to three FSs are shown in Fig. 11e.
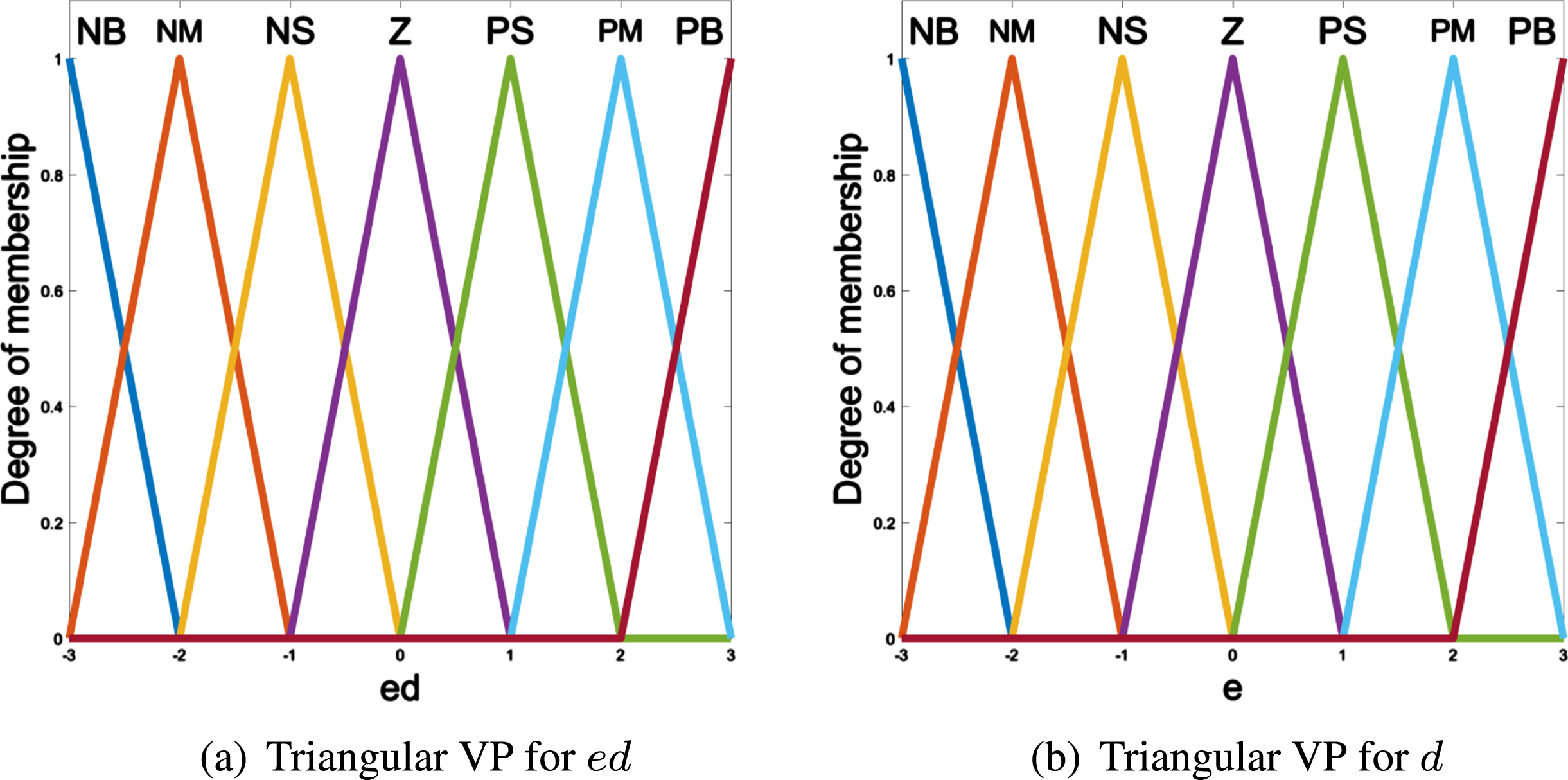
VPs of antecedents for System 11.
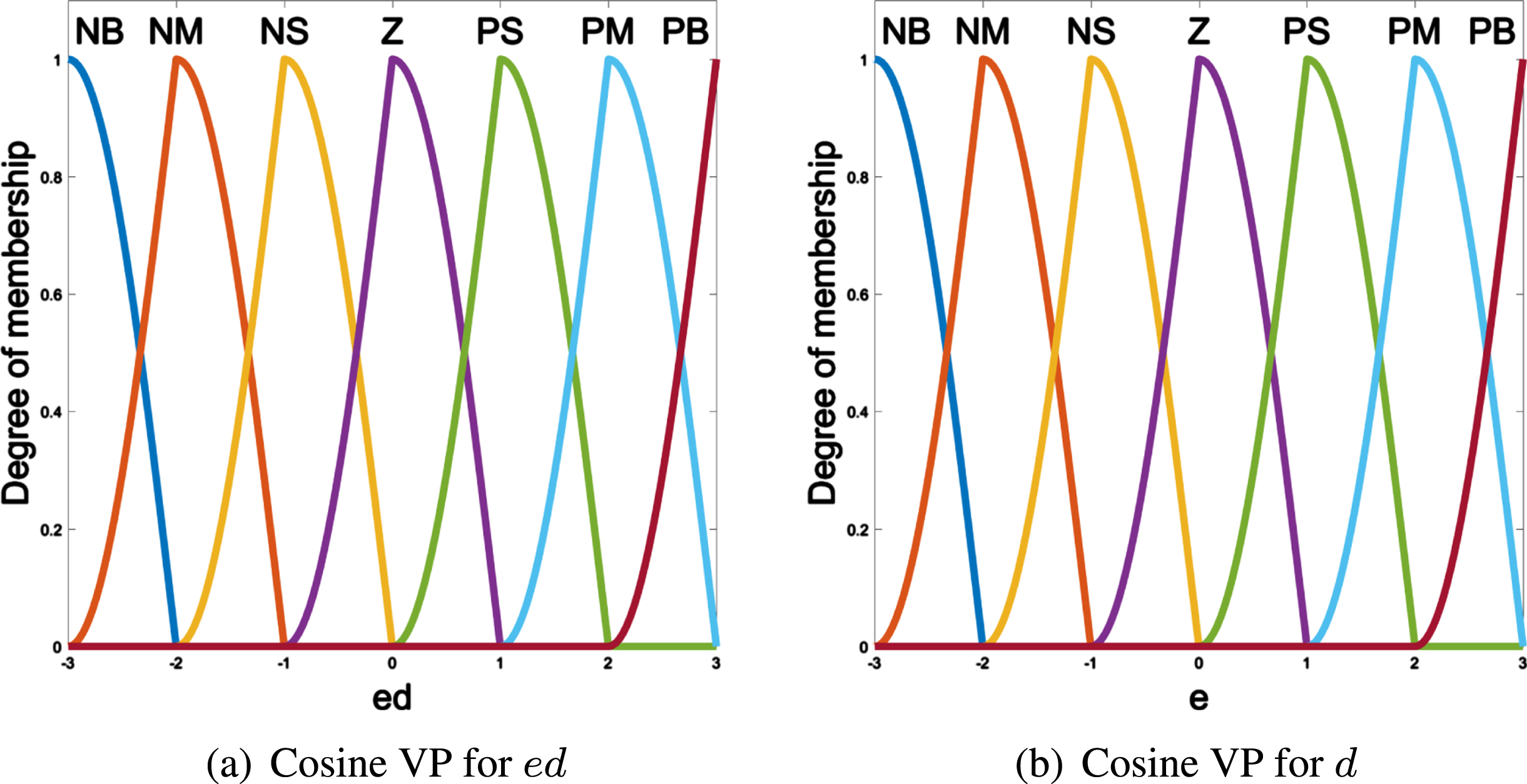
VPs of antecedents for System 12
VPs of antecedents for System 13
VPs of antecedents for System 14
VPs of antecedents for System 15
Observing Fig. 11, we see that settling times, rise times, and peak times of all step response curves are less than 0.5 seconds. Therefore, we do not evaluate the robustness of the fuzzy PID control system by analyzing the settling time, rise time, and peak time of the response curve. Since y set = 1, the overshoot is equal to (y max - 1)×100 %. This means that the larger the max deviation of the system response before reaching the stable state, the larger the overshoot, and the poorer the robustness of the fuzzy PID control system. Therefore, we can directly observe the maximum deviation of the response curve to judge the robustness of the fuzzy PID control system.
It can be seen from Fig. 11(a) that the FS with T D makes a fuzzy PID control system more robust than the fuzzy PID control systems consisting of FSs with T M , T P , and T D . From Fig. 11(b), we see that FSs with different uninorms make no significant difference in the robustness of the fuzzy PID control system. From Fig. 11(c), the same conclusion as the FSs with uninorms is obtained. Comparing Fig. 11(a), (b), and (c), it is evident that FSs with T D and uninorms make fuzzy PID control systems more robust than the fuzzy PID control systems consisting of FSs with T M , T P , T L , and overlap functions. Note that T D , U1, U2, U3 are all discontinuous aggregation functions. Therefore, it can be concluded that FSs with discontinuous aggregation functions make fuzzy PID control systems more robust than fuzzy PID control systems consisting of FSs with continuous aggregation functions.

VPs of consequents for all systems

Fuzzification
Step response curves
It can be seen from Fig. 11(d) that FSs with different types of VPs have almost no impact on the robustness of the fuzzy PID control system.
Comparing Fig. 11(a), (11b), (11c), (e), it can be concluded that the fuzzy PID control systems consisting of the FSs with discontinuous aggregation functions are more robust than fuzzy PID control systems consisting of three usually used FSs respectively.
Based on the previous subsections, we employ the fuzzy PID control system to deal with path tracking problems. The following are six paths: six types of basic elementary functions. h1 (t) =1; h2 (t) =0.1 cos(πt); h3 (t) =2
t
; h4 (t) = t2; h5 (t) =0.05 ln(0.1t); h6 (t) = arctan t.
Configurations for different fuzzy systems
Configurations for different fuzzy systems
In fact, most paths in real life can be abstracted into six types of basic elementary functions or compositions of basic elementary functions. In this subsection, regarding the above six paths, we investigate the influence of the proposed FSs with the above five types of VPs on the tracking effect of fuzzy PID control system. It has known that the VP type of the consequents has no impact on the output. Therefore, we only need to discuss the impact of the VP type of the antecedent on the path tracking control problems. In the sequel, the five types of FSs are compared, and their configurations are shown in Table 5.
Configurations for the five types of FSs
The standard deviation
Errors of FSs with different VPs for tracked functions
From the above results, we conclude that the VP type indeed impacts the quality of the systems, and errors between predetermined paths and tracking paths, called tracking errors, can be reduced by choosing appropriate VPs. What is more, we see that, for tracked functions h1 (t), h2 (t), h3 (t), h4 (t), h5 (t), and h6 (t), System 11, System 13, System 11, System 15, System 13, System 15 performance best respectively.
In this subsection, regarding the above six paths, we investigate the influence of the proposed FSs with different aggregation functions on the tracking effect of fuzzy PID control system. For tracked functions h1 (t), h2 (t), h3 (t), h4 (t), h5 (t), and h6 (t), FSs with triangular VPs, sinusoial VPs, triangular VPs, logarithmic VPs, sinusoial VPs, and logarithmic VPs are used respectively, which perform best in the previous subsection. We also employ Eq. (5.1) to evaluate the quality of FSs with different aggregation functions. For some t-norms, uninorms, and overlap functions, we obtain tracking errors for the six tracked functions as shown in Table 7, where the blue font represents the minimum error of systems regarding the tracked function.
Errors of different aggregation functions for tracked functions
Errors of different aggregation functions for tracked functions
It can be seen from Table 7 that, for tracked functions h1 (t), h2 (t), h3 (t), h4 (t), h5 (t), and h6 (t), the best performance FSs are System 11 with
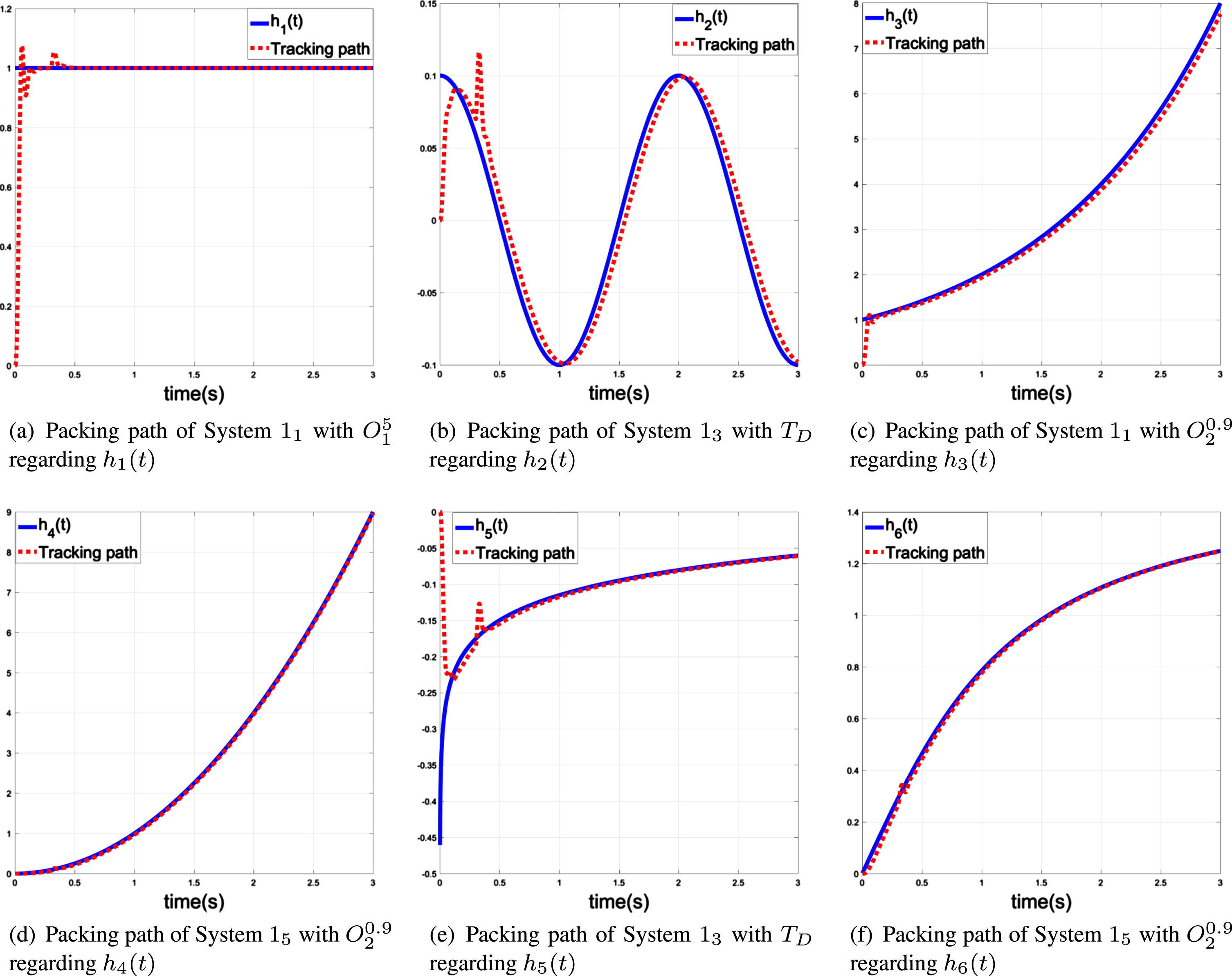
Path tracking graphs for six functions.

Path tracking deference graphs for six functions
Note that, for aggregation functions shown in Table 7, T
M
, T
P
, T
L
,
Average errors of different aggregation functions for tracked functions
It can be seen from Table 8, we see that the FSs with continuous aggregation functions overall perform better than FSs with discontinuous aggregation functions in fuzzy PID control systems to track paths h1 (t), h3 (t), h4 (t), and h4 (t), and the average errors of FSs with continuous aggregation functions is significantly smaller than the average errors of FSs with discontinuous aggregation functions. When paths h2 (t), h5 (t) are tracked, the FSs with discontinuous aggregation function overall perform better than FSs with continuous aggregation function in fuzzy PID control systems. However, the difference between the average errors of FSs with discontinuous aggregation functions and the average errors of FSs with continuous aggregation functions is not obvious. In terms of tracking accuracy, the FSs with continuous aggregation functions perform better than FSs with discontinuous aggregation functions in fuzzy PID control systems to track six basic paths.
In this subsection, we compare the tracking effect of fuzzy PID control systems consisting of the proposed FS and traditional FSs whose configurations are shown in Table 4.
It is worthy noting that the “Aggregation” in Table 4 is different from aggregation functions mentioned in this paper. In fact, aggregation functions in this paper play a role same as “And method" in Table 4.
Eq. (5.1) is employed again to evaluate the quality of systems. Some simulation experiments on MATLAB are constructed. If paths are those six types of basic elementary functions, then tracking errors with respect to those three systems are displayed in Table 9.
Comparing Tables 6 and 9, we found that when tracking paths h3 (t), h4 (t), and h6 (t), the proposed FS can reduce the tracking error of the fuzzy PID control system by changing the type of VP, compared to the traditional FSs. In fact, by observing Tables 7 and 9, we found that the proposed FS significantly reduces the tracking error of the fuzzy PID control system for the six paths, compared to the traditional FSs, achieved by changing the type of aggregation function, most of which are implemented through overlap functions and t-norm T D . Consequently, it is obtained that if appropriate VPs and aggregation functions are chosen for proposed FSs, then the proposed FS performs better than traditional FSs in fuzzy PID control systems to track the six paths.
Errors of different systems for tracked functions
Errors of different systems for tracked functions
Next, in the case of more complex paths, we compare the tracking effect of fuzzy PID control systems consisting of proposed FSs and three traditional FSs. The follows are preset paths. h7 (t) = (0.2 cos(πt)) 3; h8 (t) = t1.75 + 0.1 (0.1)
t
; h9 (t) = arctan t + 0.2 cos(πt); h10 (t) = t1.75 + t.
For h7 (t), it is evident that h7 (t) is composed of a trigonometric function and a power function. Based on the previous experiments, we know System 15 with
Errors of different systems for h7 (t)
Errors of different systems for h8 (t)
Errors of different systems for h9 (t)
Errors of different systems for h10 (t)
From Tables 10-13, it also can be concluded that if the appropriate VP and the aggregation functions are chosen for proposed FSs, then the proposed FS performs also better than traditional FSs in fuzzy PID control systems to track complex paths. In what follows, steps how to choose appropriate VPs and aggregation functions for proposed FSs are given. Observe the complex path function is composed of which basic elementary functions compose. List the FSs that make the fuzzy PID control system most effective in tracking these elementary functions. VPs and aggregation functions of these FSs are given in section 5.4. Through experimental testing FSs listed in Step 2, the optimal FS in the fuzzy PID control system to track the complex path is obtained.
Based on the above steps, the proposed FS can be extended to deal with complicated cases.
In conclusion, whether it is tracking six basic paths or tracking complex paths, the proposed FS improves the tracking performance of the fuzzy PID control system composed of traditional FSs. Therefore, the proposed FS is effective in handling path tracking problems. Additionally, the proposed fuzzy system has a simple structure and does not require fuzzification, fuzzy inference, and defuzzification, simplifying the algorithm steps of the FS. However, it still enhances the tracking performance of the fuzzy PID control system composed of traditional FSs, making the proposed FS efficient.
This paper presents the MISO FS-VPs processing information directly from the fuzzy rule base, addressing a gap in the literature relating to the inherent subjectivity and linguistic interpretation issues associated with existing FS. We define a n-dimensional VP of the n-dimensional universe utilizing a 1-dimensional vague partition and aggregation functions, subsequently analyzing its properties. Based on this, the algorithm of FS to calculate the output for corresponding input is given, and the proposed FS is proved a universal approximator, providing the theoretical support necessary for its practical application. A practical application of the proposed FS is demonstrated via its combination with a PID control system to resolve autonomous vehicle path tracking control problems. Experimental results illustrate that the proposed FS is flexible and suitable for various scenarios. Suppose there is a high demand for the robustness of the control system. In that case, we can choose the fuzzy PID control system consisting of the proposed FS with a discontinuous aggregation function. Suppose there is a high demand for the tracking accuracy of the control system. In that case, we can choose the fuzzy PID control system consisting of the proposed FS with a continuous aggregation function. What is more, experimental results support the notion that the system is effective and highly efficient compared to traditional fuzzy systems for path tracking control problems. Additionally, FSs also have been successfully applied to financial forecasting [48, 49], decision analysis [50, 51], medical systems [52, 53]. In future work, we intend to apply the FS-VPs to financial market forecasts. Various factors, such as economic data, political events, market sentiment, etc., influence financial market trends. These factors often need more specific and easier to quantify and predict. Through FSs, these fuzzy factors can be transformed into actionable rules. The proposed FS can establish VPs to predict future market trends by analyzing historical data and related factors. Also, trying to apply FSs-VPs to decision analysis and medical systems is our research direction.