This paper studies the security control problem of semi-Markov jump systems. First, the parameter uncertainty, the time-varying delay, the nonlinear function and the cyber attack are considered in the system. Second, the nonlinear function is linearized by the fuzzy logic rule. A sliding mode surface is designed to obtain an equivalent controller and get a sliding mode dynamic system. By constructing Lyapunov functions of the mode dependence, a sufficient condition for H∞ asymptotic stability of the system is obtained. Then, an adaptive sliding mode controller is established, and the original system reaches the sliding mode surface in a finite time. Finally, two examples verify the correctness and practicality of the proposed theory.
Markov jump systems (MJSs) are a type of special hybrid systems that were introduced by Krasovskii and Lidskii in 1961. The systems consist of two parts: the mode and the state. Their characteristic is to better simulate the sudden transform of the dynamic system structure, such as sudden change of surroundings, human intervention, components damage of the system and association change of subsystems. The systems can jump randomly in modes during work. According to this behavior, MJSs have been diffusely used in Aircraft attitude determination and estimation, Missile Overload Control System and so on [1–4]. Nowadays, many approaches have been proposed for controlling MJSs, such as state feedback control [5], non-fragile control [6], fault-tolerant control [7], H∞ control [8] and so on.
There is no ideal linear model in the actual industry, and most of them exist in the form of nonlinear functions, such as the load frequency control (LFC) system, hydraulic automatic gauge control (AGC) system and so on. The nonlinear term directly leads to the decrease of the tracking control accuracy, the oscillation of the balance area and the unsmooth motion curve with the system. Most of the ideas at this stage are to utilize linear models to gradually approximate nonlinear functions. In some study [9–13], the global Lipschitz condition is used to constrain the nonlinearity, which has a large error and a poor fitting effect. However, Takagi-Sugeno(T-S) fuzzy model [14–16], a nonlinear mathematical model for describing complex nonlinear industrial processes and dynamic systems, is used to approximate complex and unmodeled nonlinear systems. We extend the fuzzy idea from the whole to the local nonlinearity, and use numbers of linear functions to fit smooth nonlinear functions. And as the application range of modern control systems continues to expand, the demand for system robustness and stability is increasing. In practical applications, the system is often subject to various unavoidable disturbances and time delays, which can pose significant challenges to its control and stability. Therefore, effectively addressing the impact of time delays on the system has become a critical issue in the design of control systems. D. Zhang et al. considered an output tracking control for high-order fully actuated systems with communication delays and external disturbances [17]. H. Chehardoli et al. studied an adaptive robust controller for nonlinear cascade systems with multiple time-varying delays under external disturbance [18].
With the rapid development of the internet, the proliferation of internet of things (IoT) devices has enabled dynamic exchange of information through networks, enhancing product and service performance [19]. However, along with these advancements, a series of security and privacy concerns have emerged. The system information interaction process is vulnerable to cyber attacks [20–22]. From the perspective of system control, cyber attacks make the sensor and controller signals untrustworthy and unavailable, resulting in the error dynamic behavior of the system. From the perspective of system estimation and identification, cyber attacks can manipulate the system’s sensor data or control instructions, they can result in errors in parameter estimation and system identification, leading to compromised control effectiveness and stability [23, 24]. To address these challenges, several researchers have proposed solutions in different domains. For instance, J. Liu et al. designed a secure tracking controller for discrete-time networked control systems with stochastic cyber attacks based on the dynamic event-triggered communication method [25]. S. Liu et al. considered the problem of saturation control for discrete-time fuzzy nonhomogeneous Markov switching singularly perturbed systems [26]. Z. Zhang et al. investigated the secure synchronization control problem for Markov jump neural networks subjected to cyber attacks [27]. W. Qi et al. considered the existence of actuator failures and deception attacks within networked semi-Markov switching systems, and used sliding mode control to achieve stochastic stability of the system [28]. N. Goyal et al. suggested a detection and prevention technique for wormhole attack in underwater wireless sensor networks to decrease the overall traffic on the network [29]. However, despite these efforts, there are still unresolved issues in the current state of research. One key aspect that requires attention is the cyber attack control problem of the system under complex environmental factors. We emphasize the importance of employing advanced linearization techniques to solve the control problem and enhance system performance. The proposed approach contributes to the existing body of research by addressing the challenges posed by complex environmental factors and cyber attacks, providing a robust control framework for ensuring system stability and performance.
This paper studies the subject of sliding mode control of nonlinear semi-Markov jump systems with cyber attacks. The primary contributions are briefed below:
Due to the complexity of the actual industrial environment and the vulnerability of network transmission, the system model should be considered comprehensive. This model provides a more accurate representation of the system dynamics, enabling a deeper understanding of system behavior and facilitating the design of robust control strategies.
By utilizing fuzzy logic rules and Gaussian membership functions, we adopt a novel approach to approximate the nonlinear function and subsequently linearize it, distinguishing our method from the Lipschitz conditional constraint nonlinear function method.
We consider the model influencing factors as unknown parameters. By employing an integral sliding surface and an adaptive controller, we utilize LMI techniques to estimate the unknown parameters and establish sufficient conditions for the system to achieve both H∞ asymptotic stability and finite-time reaching of the sliding surface.
System description and preliminaries
Consider the following uncertain nonlinear semi-Markov jump system with a time-varying delay and a cyber attack
where , , and are the system state, the external disturbance, the attacked input and the system output, respectively. f (x (t) , t) represents an unknown smooth nonlinear function. d (t) represents time-varying delay, which satisfies , where and μ are known constants.
A (rt), Ad (rt), B (rt), Bf (rt), Bw (rt) and C (rt) are coefficient matrices with appropriate dimensions, and
where and are row full rank and column full rank (q < m), respectively. Ff (rt) is a coefficient matrix with appropriate dimensions. ΔA (rt) and ΔAd (rt) represent unknown time-varying matrices of system parameter uncertainty, and they satisfy
where M (rt), N (rt) and Nd (rt) are coefficient matrices with appropriate dimensions, Γ (rt, t) is a time-varying matrix, which satisfies ΓT (rt, t) Γ (rt, t) ≤ I.
{rt, t≥ 0 } is a semi-Markov process with right continuous values from a finite set S ={ 1, 2, ⋯ , N }. The transition probability matrix Π = (πij (h)) is defined as follows:
where h ≥ 0, , πij (h) ≥ 0, ∀i, j ∈ S, i ≠ j, . And πij (h) has upper and lower bounds, namely .
The adversary uses a cyber attack to affect controller-actuator channel signal transmission. The attacked input model is defined as follows:
where u (t) is the control input, ρ = diag {ρ1, ρ2, ⋯ , ρm} represents that the attacker modifies the control signal proportionally to achieve amplification or reduction of the control effect, αa (t) is an arbitrary false data injection attack signal, which can be a constant or a time-varying function, where α = diag{ α1, α2, ⋯ , αm }.
Remark 1. Markov jump systems find practical applications in various domains where systems undergo dynamic transitions. Some key domains include robotics systems [30], unmanned aerial vehicle control systems [31], and power systems [32]. For instance, in power systems, Markov jump systems are utilized to depict different operating modes and state transitions of the system. Power systems involve uncertainties such as load variations, generator output fluctuations, and energy supply uncertainties. Markov jump systems assist in modeling and analyzing the dynamic behavior of power systems, providing control strategies and optimization approaches based on state transitions.
Remark 2. The attack model (4) can represent DoS attacks and false data injection attacks. It can be directly applied to the research of network attacks in power systems, which allows for scenarios where measurement data and commands sent by IoT-based devices in the power grid are lost, modified, or manipulated [33, 34]. Furthermore, this attack model also finds applications in unmanned intelligent systems, including unmanned surface vehicles [35] and unmanned aerial systems [36].
Assumption 1. [37, 38] There are unknown positive scalars and such that, , .
Assumption 2. [39] For column full rank decomposition (2), there is an unknown positive constant κ that makes the following equation true
Next, a fuzzy logic system method is used to approximate the unknown smooth nonlinear function in system (1). The fuzzy rules are expressed as follows:
R (q): IF x1 is and x2 is and ⋯ xn is
THEN y is Dq, q = 1, 2, ⋯ , M
where R (q) is the q-th fuzzy rule, M is the number of IF-THEN rules, xn is the n-th input of the fuzzy logic system, y is the output of the fuzzy logic system. Using techniques such as single-point fuzzification, center defuzzification and product operations, and choosing Gaussian function as membership function, we have
where is the membership function of the fuzzy set , is adjustable constant, Dq is the output fuzzy set.
Let
therefore (5) can be rewritten as
where θ = [θ1, θ2, ⋯ , θM] T and β (x) = [β1 (x) , β2 (x) ⋯ , βM (x)] T. It can be clearly seen that 0 ≤ βq (x) ≤ 1.
Lemma 1.[40] If f (x) is a continuous function defined on a bounded closed set Ωx, then for any positive constant ɛ0, there exists a fuzzy logic system (5) such that the following equation holds
Based on Lemma 1, the unknown smooth nonlinear function in system (1) can be written as
where ∥ɛ (x) ∥ ≤ ɛ0.
Main results
In this section, we mainly divide into two parts: design a dynamic sliding mode surface based on the state information and the attack model, construct the equivalent controller through a generalized inverse matrix to achieve H∞ asymptotic stability of the sliding mode dynamic system; design an adaptive sliding mode control strategy, and the state trajectory can reach the sliding mode surface within a finite time.
sliding mode surface design
In view of (4), consider the following dynamic sliding mode surface function:
where , is the generalized inverse of Bvi, is the estimated value of the attack parameter ρ. Ki is the control gain. The derivation of (6) can be obtained that
Let , we have
Substituting the equivalent controller ueq into system (1) to obtain the sliding mode dynamic system
where BGi = I - BviGi.
Theorem 1.For positive scalars ɛ1i, ɛ2i, ɛ3i, ɛ4i, Lyapunov positive matrices Xi, , , , , , and matrices , (k = 1, 2, 3, 4), the following matrix inequalities hold, the sliding mode dynamic system (7) is H∞ asymptotic stability with respect to parameter γ > 0.
where
Proof. First, we consider w (t) = 0 and choose the Lyapunov-Krasovskii function as
where
Let ℓ be the weak infinitesimal operator of the Markov process, then
where
Therefore, the weak infinitesimal operator of V1 (x (t) , i) is
For arbitrarily small time interval Δt, the first-order approximation equation of x (t + Δt) can be written as
Using the properties of the cumulative distribution function, we can get
Defining πij (h) = qijπi (h) , i ≠ j and , we have
Assuming that
Similarly,
Based on the Newton-Leibniz function, we get
where
According to the property of definite integral, the following inequality holds
We can further obtain
According to the well-known scaling method, the following matrix inequalities can be obtained
In summary,
where
Then we consider H∞ performance index with w (t) ≠ 0
Let , multiply left and right by diag {Xi, Xi, Xi, Xi, Xi, Xi} and its transpositionat the same time. Let . Based on Schur complement and conditions (8–10), we know J < 0 holds. So there is a positive scalar such that
Using Dynkins formula, we can immediately have
Consequently, we have
Therefore, system (7) is H∞ stochastic asymptotically stable with respect to parameter γ. The proof is completed.
Adaptive sliding mode law design
Theorem 2.Considered uncertain semi-Markov jump system (1), the linear matrix inequality (8) is assumed to be feasible, and sliding mode surface (6) is designed to satisfy . Given a positive scalar ϑ, the sliding mode control law is designed as follows, the system state trajectory can reach the sliding mode surface in the finite time.
where
And the parameters of the adaptive law satisfy the following equations
where c0l, c1l, c2l, c3l, c4l, c5l and cb are adaptive gains, respectively.
Proof. Consider the following Lyapunov-Krasovskii function
where
Their derivatives are as follows
Based on (12) and Lemma 1, we can find
Then can be scaled to
And
Based on
we have . It means that the trajectory of system (1) can reach the sliding mode surface in the finite time. The proof is completed.
Numerical examples
In this session, two examples are furnished to prove the correctness and practicability of the above technologies.
Example 1. The following parameters are given for system (1), where the rt = 2 as shown as in Fig. 1, and
Mode 1:
Mode 2:
The system mode rt.
The upper bound matrix and the lower bound matrix of the transition probability matrix are as follows
The fuzzy set function is defined as
And the external disturbance, nonlinear function and attack model are as follows
Selecting parameters , μ = 1.2 and γ = 0.8, and the initial value . Based on Theorem 1, the controller gains are founded as
Figure 2 shows the state trajectories approach to zero based on the proposed sliding mode controller. The controller trajectories are shown in Fig. 5, which means controller (4) has the ability to ensure the stability of system (1) under cyber attacks. Meanwhile, this paper converts many known parameters into unknown parameters and estimates them. The parameters estimation of the attack and nonlinear function are shown in Figs. 3 and 4. These simulation results show that system (1) can be achieved convergence under controller (4) fastly, and the proposed results are more applicable.
The state response x (t).
The estimation parameters.
The estimation of nonlinear function f (x (t) , t).
The controller u (t).
The RLC series circuit.
The system mode rt.
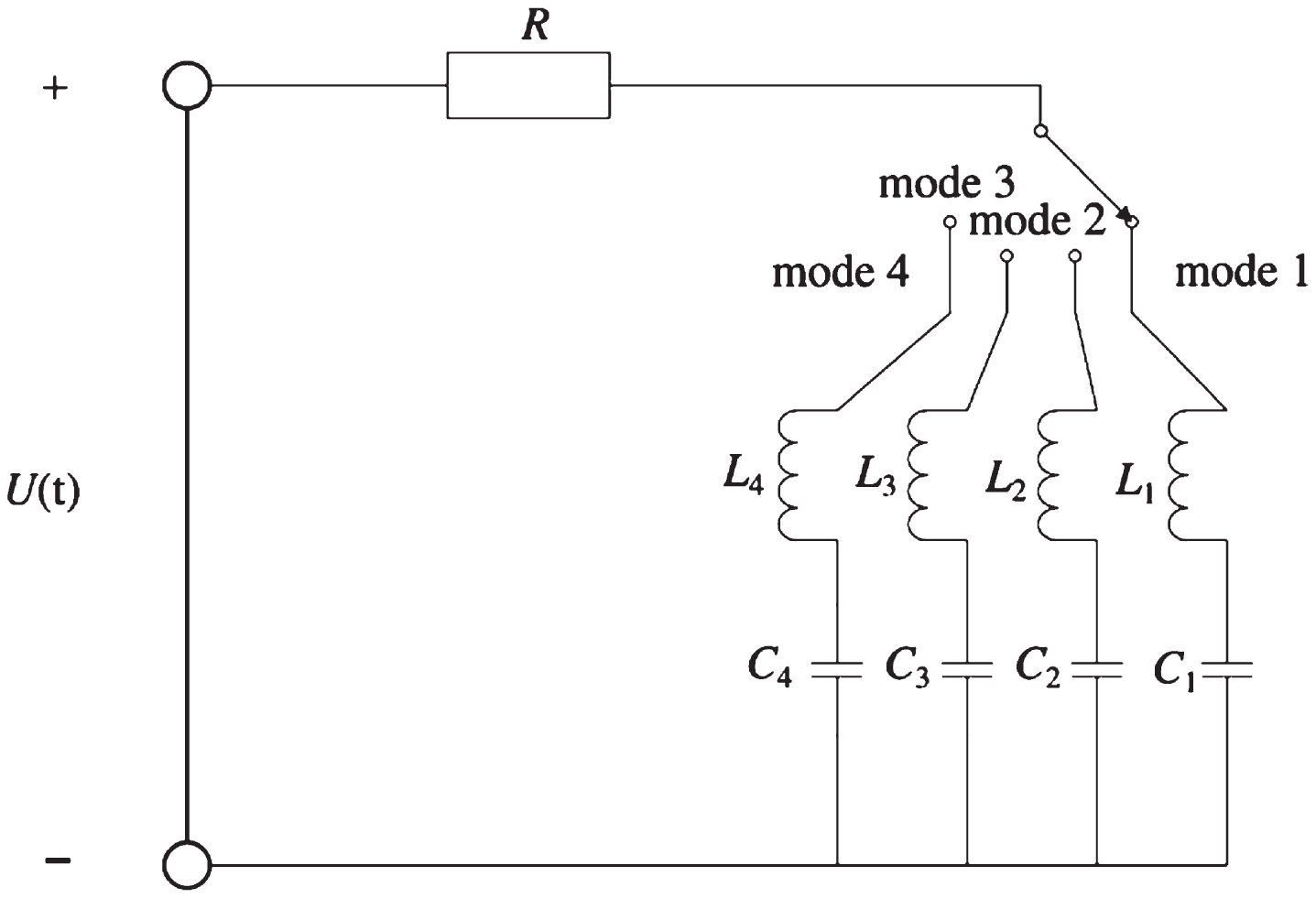
Example 2. Consider the RLC series circuit given in Fig. 6, where the rt = 4 as shown in Fig. 7. In this circuit, various factors need to be considered to accurately model its behavior. The voltage or current in the RLC series circuit may exhibit fluctuations and uncertainties. The inductance and capacitance components introduce delayed responses. Sudden changes in the power supply voltage of other circuit components can occur. The circuit elements may exhibit nonlinear effects, such as nonlinear resistance, inductance, or capacitance. Furthermore, as a link in the smart grid, the RLC series circuit is also vulnerable to cyber attacks. Consequently, the RLC series circuit can be effectively modeled using the form of system (1). Now we set the system to be two-dimensional: x1 (t) = uC (t) and x2 (t) = iL (t) [41]. Then the electrical circuit of Fig. 6 can be arranged as the MJSs in (1) with the following parameters:
where C1 = 0.5F, C2 = 0.8F, C3 = 0.4F, C4 = 0.7F, R = 0.01Ω, L1 = 4H, L2 = 8H, L3 = 6H, L4 = 5H. And other parameters as follows:
The upper bound matrix and the lower bound matrix of the transition probability matrix are as follows
The fuzzy set function, external disturbance, nonlinear function and attack model are defined as follows in Example 1. Selecting parameters μ = 1.2, and γ = 1. The initial value is chosen as , and the controller gains can be calculated based on Theorem 1 as follows
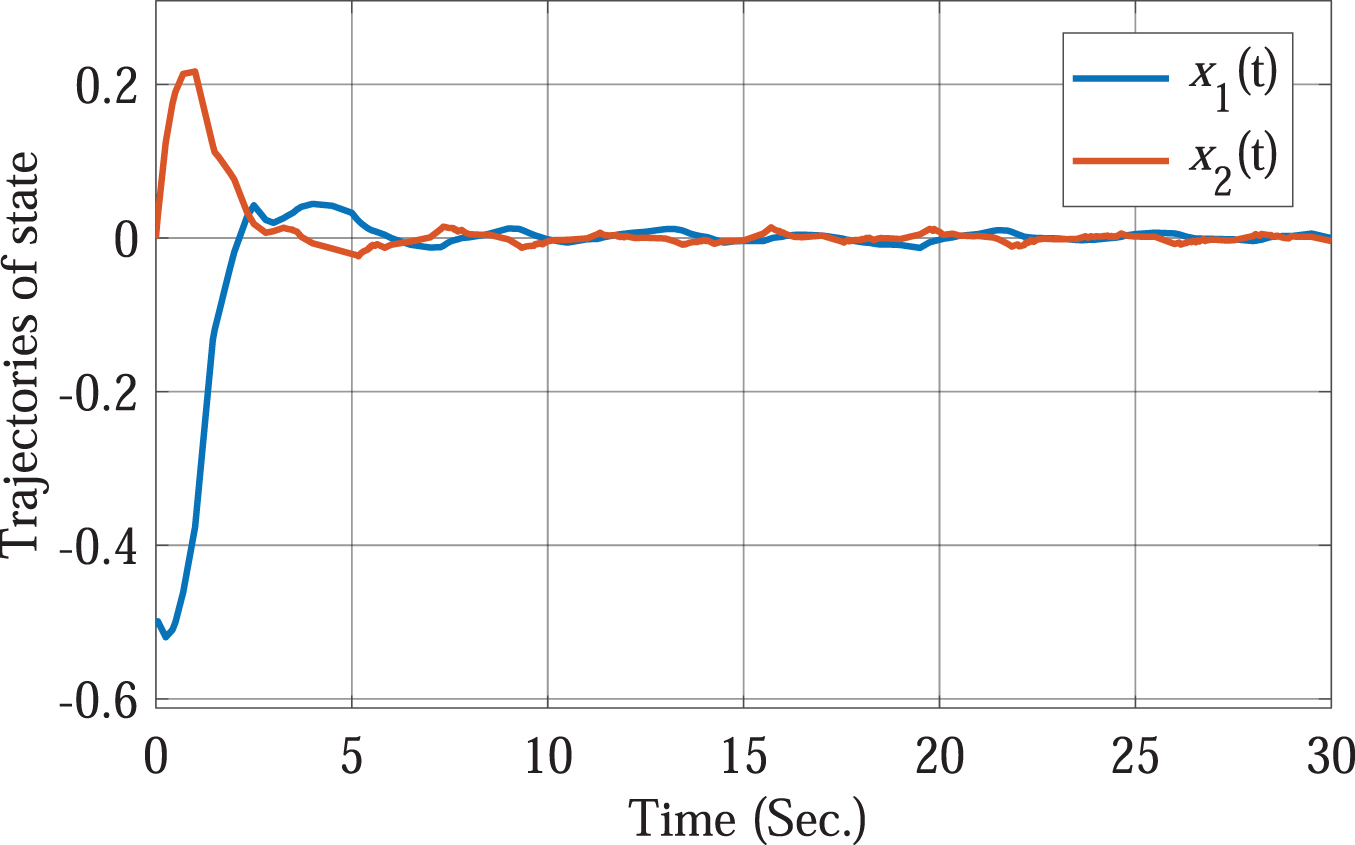
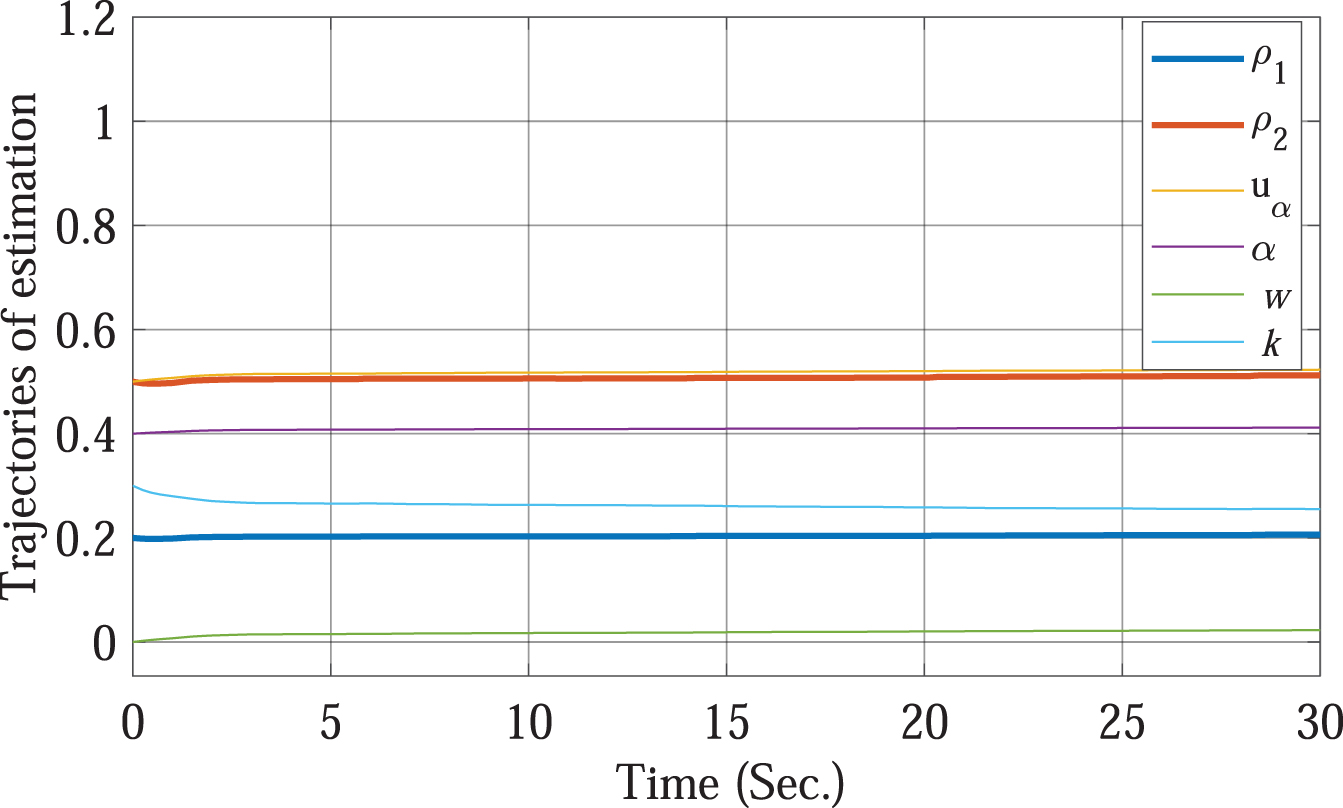
Figure 8 shows the state trajectories approach to zero based on the proposed sliding mode controller. The controller trajectories are shown in Fig. 11. Meanwhile, the parameters estimation of the attack and nonlinear function are shown in Figs. 9 and 10. And the trajectories of sliding mode surface are shown in Fig. 12, which means the accessibility and effectiveness of the designed sliding surface are demonstrated. The above simulation results prove the practicability of the proposed results in this paper. After RLC circuit modeling, the system can realize convergence based on the proposed sliding mode controller (4).
The state response x (t).
The estimation parameters.
The estimation of nonlinear function f (x (t) , t).
The controller u (t).
The sliding mode surface s (t).
Then, we conducted a comparison between the control strategy presented in this paper and the method proposed in Ref. [42]. Figure 13 shows the control effect of the method in Ref. [42]. By examining the comparison between Figs. 8 and 13, it becomes apparent that the control strategy introduced in this paper enables the system to achieve faster convergence and exhibits reduced oscillation amplitude at the equilibrium point.
This paper mainly studies the sliding mode control problem of nonlinear semi-Markov jump systems with time-varying delays and cyber attacks. The attack model is designed to be a permanent function over time, both multiplicative and additive. The nonlinear function is fitted by the fuzzy logic rule. The sliding mode surface based on system parameters is designed to obtain the equivalent controller, and then to obtain a sliding mode dynamic system. Based on the LMI technology, the mode dependent Lyapunov functions are given to prove that the system is H∞ asymptotic stability and reaches the sliding mode surface in finite time. In the future work, we will consider the stability of multi-channel systems with cyber attacks.
Footnotes
Acknowledgments
This research was funded by the National Natural Science Foundation of China (62173030) and the Beijing Natural Science Foundation (4222050).
Author contributions
All authors have participated sufficiently in the work to take responsibility for it. All authors have reviewed the final manuscript and approve it for publication.
Conflict of interest
None to report.
References
1.
BoukasE.K., ZhangQ. and YinG., Robust production and maintenance planning in stochastic manufacturing systems, IEEE Transactions on Automatic Control40(4) (1994), 1098–1102.
2.
MengeH. and RobinsonJ.W., Stability of Kalman filtering with Markovian packet losses, Automatica43(4) (2007), 598–607.
3.
MirmanL.J., MorandO.F. and ReffettK.L., A qualitative approach to Markovian equilibrium in infinite horizon economies with capital, Journal of Economic Theory139(1) (2015), 75–98.
4.
AhmedQ., IqbalA., TajI. and AhmedK., Gasoline engine intake manifold leakage diagnosis/prognosis using hidden Markov model, International Journal of Innovative Computing Information and Control8(7) (2012), 4661–4674.
5.
ChenH., ZhuC., HuP. and ZhangY., Delayed-state-feedback exponential stabilization for uncertain Markovian jump systems with mode-dependent time-varying state delays, Nonlinear Dynamics69 (2012), 1023–1039.
6.
ShenH., YangC., XiaJ. and ParkJ.H., Non-fragile fuzzy control for nonlinear fast sampling singularly perturbed systems subject to Markov jumping parameters, IEEE Transactions on Fuzzy Systems29(7) (2021), 1953–1966.
7.
YangH., JiangY. and YinS., Adaptive fuzzy fault tolerant control for Markov jump systems with additive and multiplicative actuator faults, IEEE Transactions on Fuzzy Systems29(4) (2021), 772–785.
8.
BoukasE.K. and LiuZ.K., Robust H∞ control of discrete-time Markovian jump linear systems with mode-dependent time-delays, IEEE Transactions on Automatic Control46(12) (2001), 1918–1924.
9.
YuP. and MaY.C., Observer-based asynchronous control for Markov jump systems, Applied Mathematics and Computation377 (2020), 125184.
10.
DongS., WuZ., ShiP., KarimiH.R. and SuH., Networked fault detection for Markov jump nonlinear systems, IEEE Transactions on Fuzzy Systems26(6) (2018), 3368–3378.
11.
WangY., YanW., ZhangH. and XieX., Observer-based dynamic event-triggered H∞ LFC for power systems under actuator saturation and deception attack, Applied Mathematics and Computation420 (2022), 126896.
12.
CuiY., SunH. and HouL., NN-based decentralized adaptive event-triggered control for nonlinear interconnected systems under intermittent DoS and injection attacks, International Journal of Adaptive Control and Signal Processing36(9) (2022), 2249–2268.
13.
SunZ., XueW., LiuJ., ChenF. and LuX., Adaptive event-triggered resilient control of industrial cyber physical systems under asynchronous data injection attack, Journal of the Franklin Institute359(7) (2022), 3000–3023.
14.
ZhangQ., QiaoL., ZhuB. and ZhangH., Dissipativity analysis and synthesis for a class of T-S fuzzy descriptor systems, IEEE Transactions on Systems, Man, and Cybernetics: Systems47(8) (2017), 1774–1784.
15.
MuY., ZhangH., XiR. and GaoZ., State and fault estimations for discrete-time T-S fuzzy systems with sensor and actuator faults, IEEE Transactions on Circuits and Systems II: Express Briefs68(10) (2021), 3326–3330.
16.
LiY., LiuL. and FengG., Finite-time controller synthesis of T-S fuzzy systems, IEEE Transactions on Systems, Man, and Cybernetics: Systems50(5) (2020), 1956–1963.
17.
ZhangD. and LiuG., Predictive control for networked high-order fully actuated systems subject to communication delays and external disturbances, ISA Transactions139 (2023), 425–435.
18.
ChehardoliH. and GhasemiA., Adaptive robust output tracking control of uncertain nonlinear cascade systems with disturbance and multiple unknown time-varying delays, Asian Journal of Control19(6) (2017), 2009–2016.
19.
SainiH., PoriyeM. and GoyalN., A survey on security threats and network vulnerabilities in internet of things, Big Data Analytics in Intelligent IoT and Cyber-Physical Systems Singapore, Springer (2023), 297–314.
20.
GuoJ., WangX., XueW. and ZhaoY., System identification with binary-valued observations under data tampering attacks, IEEE Transactions on Automatic Control66(8) (2021), 3825–3832.
21.
AlmseidinM., Al-SawwaJ. and AlkasassbehM., Generating a benchmark cyber multi-step attacks dataset for intrusion detection, Journal of Intelligent & Fuzzy Systems43(3) (2022), 3679–3694.
22.
ChenY., ChangA. and HuangC., Using learning time as metrics: an artificial intelligence driven risk assess framework to evaluate DDoS cyber attack, Journal of Intelligent & Fuzzy Systems40(4) (2021), 7691–7699.
23.
GuoJ., JiaR., SuR. and ZhaoY., Identification of FIR systems with binary-valued observations against data tampering attacks, IEEE Transactions on Systems, Man, and Cybernetics: Systems53(9) (2023), 5861–5873.
24.
GuoJ., JiaR., SuR., SongY. and JingF., DoS attack detection in identification of FIR systems with binary-valued observations, Asian Journal Control25 (2023), 2469–2481.
25.
LiuJ., DongY., ZhaL., TianE. and XieX., Event-based security tracking control for networked control systems against stochastic cyber-attacks, Information Sciences612 (2022), 306–321.
26.
LiuS., ChengJ., ZhangD., YanH. and ParkJ., Saturation control for fuzzy Markovian switching systems with singularly perturbation and cyber-attacks, Information Sciences609 (2022), 931–948.
27.
ZhangZ., ChenZ., ShengZ., LiD. and WangJ., Static output feedback secure synchronization control for Markov jump neural networks under hybrid cyber-attacks, Applied Mathematics and Computation430 (2022), 127274.
28.
QiW., LvC., ZongG. and AhnC., Sliding mode control for fuzzy networked semi-Markov switching models under cyber attacks, IEEE Transactions on Circuits and Systems II: Express Briefs69(12) (2022), 5034–5038.
29.
GoyalN., SandhuJ. and VermaL., CDMA-based security against wormhole attack in underwater wireless sensor networks, Advances in Communication and Computational Technology, Singapore, Springer 668 (2021), 829–835.
30.
FoxD., BurgardW. and ThrunS., Active Markov localization for mobile robots, Robotics and Autonomous Systems25(3–4) (1998), 195–207.
31.
WuF., ZhangH., WuJ. and SongL., Cellular UAV-to-Device communications: trajectory design and mode selection by multi-agent deep reinforcement learning, IEEE Transactions on Communications68(7) (2020), 4175–4189.
32.
YaoR., SunK., LiuF. and MeiS., Management of cascading outage risk based on risk gradient and Markovian tree search, IEEE Transactions on Power Systems33(4) (2018), 4050–4060.
33.
LiX., JiangC., DuD., LiW., FeiM. and WuL., A novel state estimation method for smart grid under consecutive denial of service attacks, IEEE Systems Journal17(1) (2023), 513–524.
34.
HabibA., HasanM., AlkhayyatA., IslamS., SharmaR. and AlkwaiL., False data injection attack in smart grid cyber physical system: Issues, challenges, and future direction, Computers and Electrical Engineering107 (2023), 108638.
35.
MaY., NieZ., HuS., LiZ., MalekianR. and SoteloM., Fault detection filter and controller co-design for unmanned surface vehicles under dos attacks, IEEE Transactions on Intelligent Transportation Systems22(3) (2021), 1422–1434.
36.
WangZ., LiY., WuS., ZhouY., YangL., XuY., ZhangT. and PanQ., A survey on cybersecurity attacks and defenses for unmanned aerial systems, Journal of Systems Architecture138 (2023), 102870.
37.
LiM., ChenY., ZhangY. and LiuY., Adaptive sliding-mode tracking control of networked control systems with false data injection attacks, Information Sciences585 (2022), 194–208.
38.
RoyS., BaldiS. and FridmanL., On adaptive sliding mode control without a priori bounded uncertainty, Automatica111 (2020), 108650.
39.
YangH., JiangY. and YinS., Adaptive fuzzy fault-tolerant control for Markov jump systems with additive and multiplicative actuator faults, IEEE Transactions on Fuzzy Systems29(4) (2021), 772–785.
40.
TangF., NiuB., WangH., ZhangL. and ZhaoX., Adaptive fuzzy tracking control of switched MIMO nonlinear systems with full state constraints and unknown control directions, IEEE Transactions on Circuits and Systems II: Express Briefs69(6) (2022), 2912–2916.
41.
ZhaoJ., WangJ., ParkJ. and ShenH., Memory feedback controller design for stochastic Markov jump distributed delay systems with input saturation and partially known transition rates, Nonlinear Analysis: Hybrid Systems15 (2015), 52–62.
42.
FanX., LinW., LiuZ. and ZhaoL., Reachable set control for nonlinear Markov jump cyber–physical systems with false data injection attacks, Journal of the Franklin Institute361(1) (2024), 224–233.