
Abstract
In this paper, a type-2 fuzzy neural network is used to adaptive inverse control of a class of nonlinear systems. The proposed method has proper performance for real-time control of nonlinear and time-invariant systems and has a quick response to following changes. In this method, the high approximation ability of type 2 fuzzy systems is used to reverse system modeling and this inverse model is used immediately to control the system. In order to measure the efficiency of the proposed method, the control of dynamic, highly nonlinear and time varying water both temperature system with certain and uncertain water pressure is experimentally considered. The results show the accuracy of the proposed method.
Introduction
Nowadays, the rapid growth in computational intelligence and smart algorithms is a well-known fact. After the introduction of fuzzy logic by Zadeh and the proposal of the first application of fuzzy logic in control, intelligent systems based on fuzzy logic have found their place among a vast number of sciences, particularly in control. Ten years after the introduction of fuzzy logic, in another study, Zadeh introduced type-2 fuzzy logic. With the introduction of type-2 fuzzy logic, a number of shortcomings in type-1 fuzzy logic were mitigated. In type-1 fuzzy logic, membership degree is a non-fuzzy and real number whose determination is sometimes very difficult in some problems. However, in type-2 fuzzy logic, the membership degree is in fact a fuzzy number. For instance, in cases where uncertain and imprecise linguistic variables are used or various outcomes are considered that may have been derived from a series of close conditions, type-2 fuzzy logic can be promising [1].
Type-2 fuzzy logic, with a higher level of capabilities and flexibility compared to type-1 fuzzy logic, has gained a lot of attention during the last decade. In [2], type-2 fuzzy logic and systems are discussed in detail. In [3], three distinct structures of type-2 fuzzy neural networks have been proposed. In this reference, two fuzzification methods (type-2 fuzzy neural and adaptive node) and two type-reduction methods (the JM algorithm and adaptive layers) are discussed and decreasing gradient method is used for training the network. In [4], type-2 fuzzy neural network using fuzzy clustering method is utilized for structural identification and updating the condition parameters and the gradient algorithm is utilized for updating the parameters of the result section. Moreover, this reference argues that the fuzzy clustering method is not suitable for online identification and control. During the recent years, various methods have been proposed for training type-2 fuzzy neural networks such as genetic algorithm [5] and PSO [6]. With the expansion of research studies on type-2 fuzzy systems, these systems have found various applications such as predicting time series [7], linear motor control [8], equalization of time-variable nonlinear channels [9], sliding mode control [10], pattern detection [11], and robot control [12]. In [13], the reverse control method and type-2 fuzzy neural controller are proposed for controlling CDPM (cable-driven parallel mechanism). In this case, type-2 fuzzy interval neural network is used for the reverse detection of the system and then, the trained network is used as an offline controller. In [14], the reverse control method using ANFIS is compared to fuzzy control method for controlling water levels inside a tanker. In this reference, it is shown that the response of reversed control using ANFIS is without stable-state error and much faster than the fuzzy controller. Inverse control is rapidly developing [15, 16, 17, 18].
In this study, we first briefly introduce type-2 fuzzy logic and systems, then, we propose a type-2 fuzzy neural network structure based on the T-S model. Next, a method for designing reversed type-2 fuzzy neural controller is proposed for controlling nonlinear dynamical systems. Finally, a nonlinear dynamic system for water bath temperature system is proposed and it is experimentally controlled using adaptive reversed control method based on online control using type-2 fuzzy neural controller of the T-S model.
Type-2 fuzzy logic and systems
A type-2 fuzzy set is generally shown as Eq. (1) [19].
In Eq. (1),
In this case, the initial membership function is in the form of a set of intervals. In order to depict an interval type-2 Gaussian fuzzy membership function, two states including uncertain center (mean) and uncertain standard deviation (spread) are proposed. In the uncertain center state, the center of the Gaussian membership function is not a single number; rather, it can be any number in a bounded interval such as
Type-2 fuzzy membership function: uncertain spread (a) and uncertain mean (b).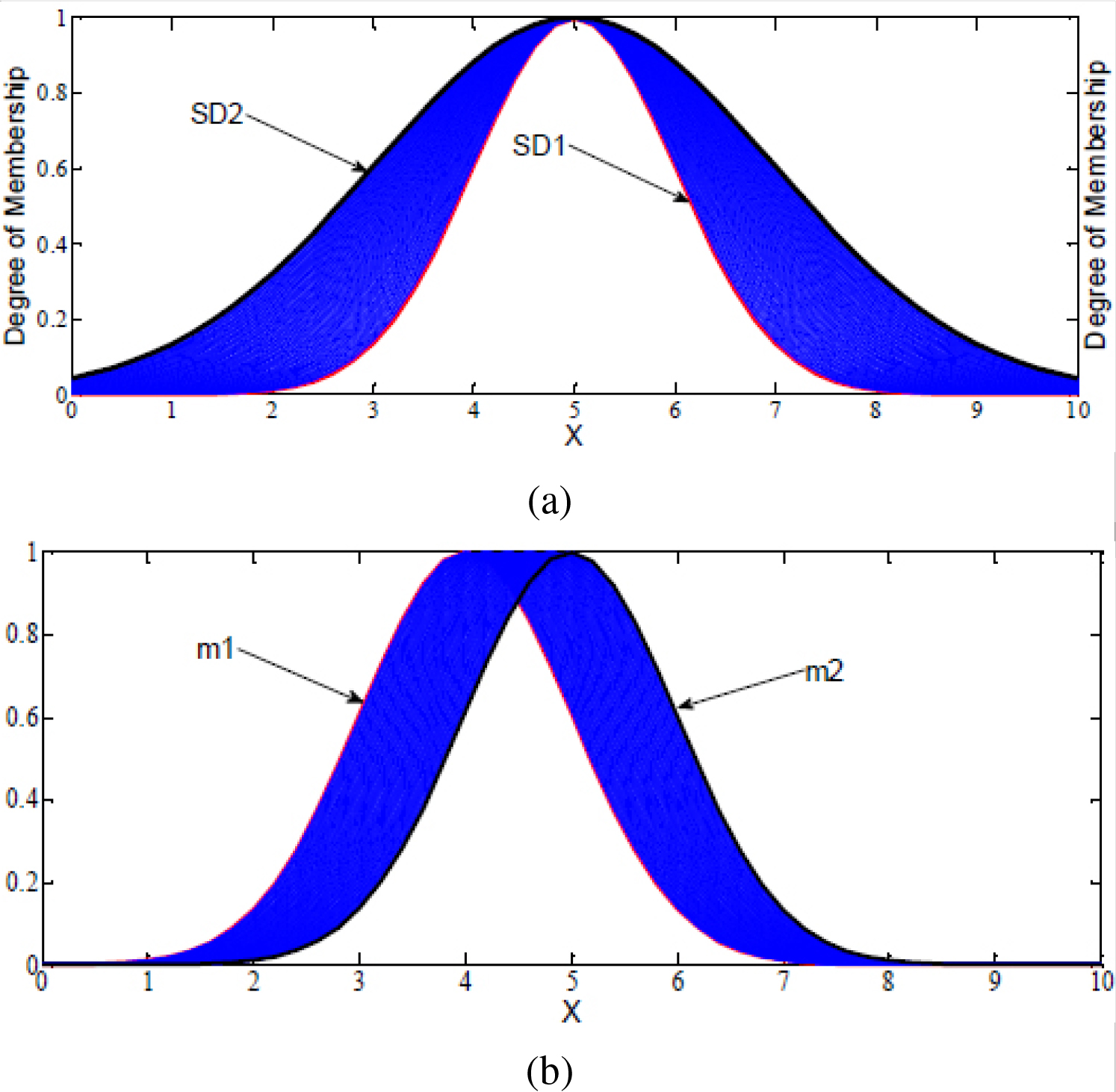
The structure of a type-2 fuzzy system.
The proposed type-2 fuzzy neural network.
The uncertain area in type-2 fuzzy functions is called FOU (footprint of uncertainty) [5]. In Fig. 1, the shaded area is the FOU of type-2 membership functions. In type-2 fuzzy systems, the lower bound of the membership function is called the “lower membership function” and the upper bound of the membership function is called the “upper membership function”.
The main difference between type-1 and type-2 fuzzy systems is related to the shape of their membership functions. In order to calculate the output in type-1 fuzzy systems, since the output of these systems is a type-1 fuzzy set, using defuzzification, a numeral value is obtained. However, in type-2 fuzzy systems, the system’s output is a type-2 fuzzy set. Therefore, after one round of defuzzification on a type-2 fuzzy set, a type-1 fuzzy set is obtained. The operation to convert a type-2 fuzzy set into a type-1 fuzzy set is called “type-reduction”, which is an important topic in type-2 fuzzy systems [20]. The structure of a type-2 fuzzy system is depicted in Fig. 2.
As can be seen from Fig. 2, the structure of a type-2 fuzzy system is similar to that of a type-1 fuzzy system, except that it has an additional “type-reduction” block.
In type-2 T-S fuzzy neural networks, similar to type-1 networks, the output is in the form of a polynomial of inputs except that in type-1, the output and its coefficients were numerical values, while in type-2, the output and its coefficients are fuzzy numbers [21]. The proposed type-2 fuzzy neural network has seven layers and in the first two layers and in the condition part, a type-2 interval fuzzy neuron is used for fuzzification. Type-reduction is performed in fourth layer using adaptive weights. In Fig. 3, a schematic representation of this network is depicted.
A fuzzy rule for the type-2 T-S model is written as follows:
In the rule presented above,
Now, we evaluate each individual layer of this structure.
Layer 0: This layer is the input layer. In this layer, there are as many nodes as the number of inputs.
Layer 1: This layer is the fuzzification layer. The output of this layer is of the following form:
In Eqs (2) and (3),
Layer 2: In this layer, using the T-norm and S-norm, the output of a type-2 fuzzy neuron which is at the upper and lower bounds of the membership function is calculated.
Layer 3: This layer is the layer of rules. In this layer, the fuzzy AND operation is carried out as follows:
Layer 4: In this layer, weighted adaptive nodes are used for type-reduction and the right-side and left-side values of their fire points are calculated as follows:
Layer 5: This layer is called the result section layer.
Layer 6: This layer contains two nodes and calculates the centroid of the result section of all the rules.
Layer 7: This layer contains one node which calculates the output.
In order to train this network, the back-propagation error algorithm is used. In this method, for each input, the network’s output is calculated and then the error is computed. First, assume that we have a pair of input-output data for the training of the network in the form
In the above equation,
In Eqs (16)–(19), the relations for updating the weights in the fourth layer, used for type-reduction, are presented.
In above-mentioned equations,
The relations for updating the parameters for the condition section, i.e. the centroid and the standard deviation of Gaussian membership functions are presented as Eqs (24)–(26).
Therefore, by applying each input
The ability of type-2 fuzzy neural networks for estimating functions has allowed these networks to have the capability of detection and control of many of systems. In this section, we propose two distinct methods for designing type-2 fuzzy neural adaptive reversed controllers.
The proposed structure is depicted in Fig. 4.
The structure of adaptive inverse control based on type-2 neuro fuzzy.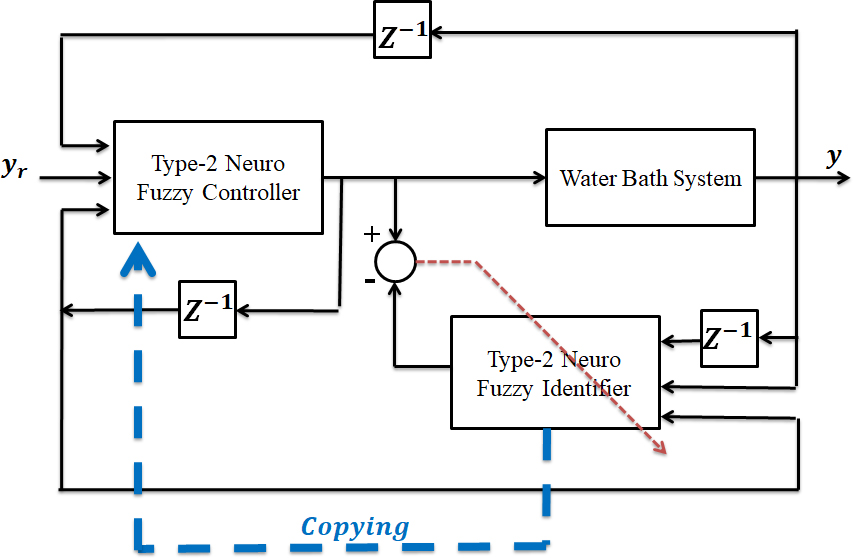
The experimental water temperature system.
In Fig. 4,
The performance of typ-2 fuzzy controller and control input.
The performance of type-1 fuzzy, type-2 fuzzy and PID controller.
In this section, water bath temperature system, which is a nonlinear dynamic system, is first introduced and then, using the inverse control method, it is online controlled. In [19], using the back-propagation fuzzy neural reversed controller implemented on a FPGA chip, the water bath temperature is controlled. In this reference, the reversed control of the water temperature is compared using back-propagation fuzzy neural controller and using neural network and the superiority of the proposed fuzzy neural system compared to the neural network in reverse controlling of the water temperature is shown. In [20], the reversed control of the water temperature is compared using fuzzy control and adaptive neural fuzzy control (ANFIS). In this reference, it is shown that the performance of the adaptive fuzzy neural control is superior to the performance of fuzzy control in tracking the reference signal. The experimental system is shown in Fig. 5.
The performance of type-1 fuzzy, type-2 fuzzy and PID controller with uncertain water pressure.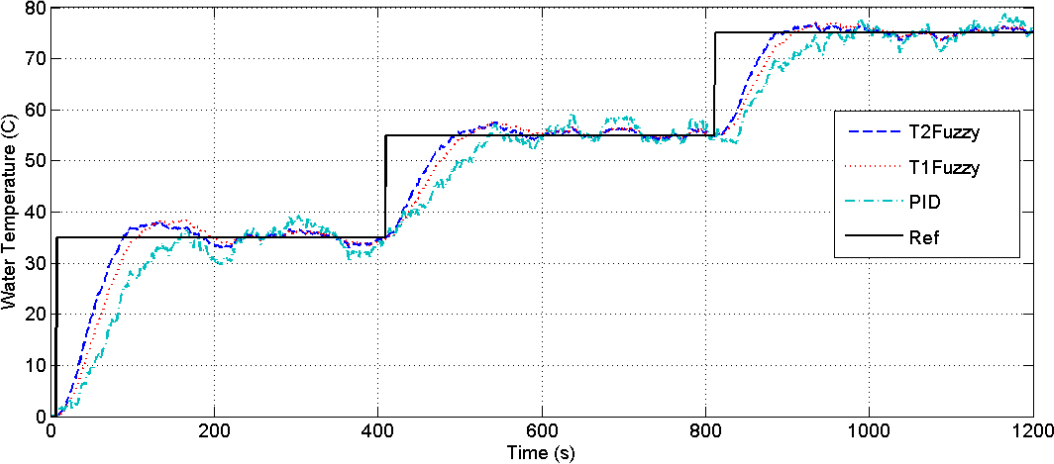
The performance of three controllers by adding and diminishing showers.
The magnification of a part of the Fig. 10 in seconds from 700 to 800.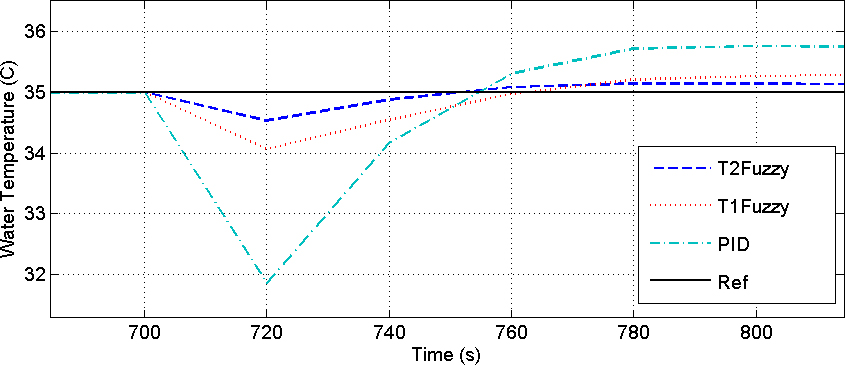
The equations for the bath water temperature system are presented as Eq. (27) [21].
In Eq. (27),
In Eq. (28),
In the reversed control structure utilized for controlling the bath water temperature, the inputs for type-2 fuzzy neural identifier network are
The objective here is that the output temperature of the bath water system track the reference temperature (
the system controlled using type-2 fuzzy neural adaptive reversed controller and control input of (voltage 0 to 5 volt) heating system are shown.
The final value of the parameters of type-2 neuro fuzzy controller
In Fig. 7, the performance of the adaptive neural fuzzy system (ANFIS), PID and type-2 fuzzy neural controller for the reversed control of bath water system is shown.
In order to demonstrate the capability of the proposed controller for overcoming uncertainties, we assumed that the water pressure is not fixed, we assumed the water pressure is randomly changed about 20% of the nominal value. Figure 8 shows the performance of the adaptive neural fuzzy system (ANFIS), PID and type-2 fuzzy neural controller for the adaptive inverse control of the bath water temperature system considering uncertain pressure.
As can be seen from Fig. 8, PID controller fluctuates when encountering uncertain water pressure and it cannot track the reference signal successfully. However, since fuzzy logic is a powerful tool to overcome the uncertainties, specially type-2 fuzzy neural controller that uses type-2 fuzzy logic, it is highly capable of tracking the reference temperature signal even when encountering significant variations in the parameters (water pressure in here).
Another challenge in the water bath system, that most of which we encountered in the bathroom, is the addition of a simultaneous shower (instantaneous water temperature reduction) and a decrease in the number of simultaneous showering (instantaneous increase in water temperature). In the following we assumed that in 420
In Fig. 9, the performance of all three controllers is illustrated for the problem of adding and diminishing showers.
Figure 10 shows the magnification of a part of the Fig. 10 in seconds from 700 to 800.
As shown in Fig. 10, the temperature of the water is reduced by adding two showers. This temperature decrease is very tangible for PID controller (3
In this study, because of using type-2 fuzzy logic, the reversed dynamic uncertainty of the system is modeled in an acceptable way and the higher the accuracy of identifying the reversed dynamics, the lower the tracking error in the reversed control method. The results obtained from this study show that the system response is much faster than methods proposed in [19, 20, 21, 22] and the higher response speed leads to the reduction of the control signal. Moreover, the tracking error is much lower than the above-mentioned references. The final value of the parameters of type-2 neuro fuzzy controller are presented in Table 1.
In this paper, type-2 T-S fuzzy neural network is used for adaptive inverse online control of a water bath temperature system. In this method, there is no need for any prior knowledge about the system. The type-2 fuzzy neural network identifies the system’s reversed dynamics while the network under training is used as a controller in a simultaneous manner. In order to simplify the structure and expanding the online applications of this network, we used rule-reduction algorithm (from 9 rules to 3 rules) both in identification and in the control. The capability of modeling uncertainties has increased the efficiency of type-2 fuzzy neural networks in identifying the reversed dynamics of the systems compared to type-1 fuzzy neural networks and PID controller. The experimental results show the superiority of T-S type-2 fuzzy neural network compared to ANFIS and PID in adaptive reversed control of water bath temperature for tracking the reference temperature signal.