
Abstract
In order to solve the problem that existing methods are affected by fundamental frequency and harmonic frequency oscillation of new energy vehicle engine, a new energy vehicle engine fault detection method based on wavelet transform and support vector machine is proposed. Firstly, a detection model of abnormal noise signal of automobile engine fault is established, and the time-frequency parameters of basis function are adjusted adaptively. Then, the mechanical excitation component and the battery excitation component in the engine surface radiation noise are separated, and the new energy vehicle engine fault signal is decomposed by feature decomposition and multi-scale separation. Finally, wavelet transform combined with support vector machine algorithm was used to extract fault features of new energy vehicles, fuzzy clustering was carried out, and time-frequency analysis of fault signals was carried out in fractional Fourier domain to realize fault detection of new energy vehicle engines. The test results show that the method has high fault identification level and good clustering of fault feature points for new energy vehicle engine fault detection, and can effectively improve the ability of engine fault detection with good application effect.
Introduction
In combination with the engine stability monitoring method of new energy vehicles, a fault detection and control model of new energy vehicles is established to improve the performance of the drive motor and control system [1]. By optimizing the design of the engine and motor control system of new energy vehicles, combined with the fault detection method, the occurrence rate of faults is reduced. By analyzing the fault stability of new energy vehicles, continuously support the scientific and technological innovation of new energy vehicles, study the fault detection methods of new energy vehicle engines, and achieve fault feature analysis in combination with time-frequency analysis algorithm, blind source separation algorithm and signal estimation algorithm to improve the stability of vehicle engines [2].
The fault detection of new energy vehicle engine is based on the analysis of abnormal noise characteristics of the vehicle engine, combined with the analysis of characteristics of steady and transient operating conditions, and uses the diagnostic process monitoring and analysis methods of abnormal noise to achieve the analysis of vehicle fault characteristics. TRIVEDI M et al. proposed a deep learning and blockchain-based electric vehicle fault detection framework, which identifies tire pressure, temperature and battery failure [3]. At the same time, we use the 5G wireless network with high scalability and reliability and the Interplanetary File System (IPFS) protocol to conduct data transactions. The framework uses convolutional neural network (CNN) and long short memory (LSTM) models to deal with air tire pressure failure, temperature anomaly and battery failure detection, and predict the existence of failure data, so as to ensure a safer journey for users. The framework has the advantages of high safety, economic efficiency and reliability. The deep learning model used in this method requires a lot of computational resources and time to train, which leads to a long response time for its detection and poor detection effect. Abboush Mohammerd et al. used a real-time fault injection framework based on hil to generate fault data without changing the original system model [4]. The model structure is constructed by the combination of convolutional neural network (CNN) and Long and short memory (LSTM), but this method requires more advanced hardware equipment, higher cost, and its detection effect still has a large room for improvement, which leads to the failure of this method to be widely applied. The reliability of the machine is improved and defects in adhesives and sliding attachments are prevented [5]. The experiments are aimed at vibration signals and motor currents. Six fault conditions of linear bearing are established. The analysis of vehicle fault characteristics is realized by means of spectrum analysis, data analysis, peak factor analysis and variance analysis. This method is mainly aimed at the detection and diagnosis of linear bearing faults, which may not be suitable for other types of fault detection and diagnosis, and the application effect is not good.
To solve these problems, this paper proposes a new energy vehicle engine fault detection method based on wavelet transform and support vector machine. Firstly, the detection model of abnormal noise signal of automobile engine fault is established according to various mechanical noises and abnormal noises, and the mechanical excitation component and battery excitation component in the radiated noise of engine surface are separated [6]. Then, the attenuation curve, independent component analysis and empirical mode decomposition methods are used to realize the feature decomposition and multi-scale separation of the fault signal of new energy automobile engine. The wavelet transform is used to extract fault features, and the support vector machine algorithm is used to carry out fuzzy clustering processing on the extracted fault features of new energy. Finally, the simulation test shows the superior performance of the method in improving the engine fault detection capability of new energy vehicles.
New energy vehicle engine fault signal processing
Fault signal extraction
In order to realize the fault detection of new energy vehicle engine based on wavelet transform and support vector machine, the fault information collection model of new energy engine was first constructed [7]. When the automobile engine is in the transient condition, the detection model of the abnormal noise signal of the automobile engine fault is established according to various mechanical noises and abnormal noises. The abnormal noise is sensitive to the parameters of the variable camshaft phase system (VCT), and the abnormal noise components in the cylinder head surface vibration signal are extracted. Assume that the instantaneous speed sample set of crankshaft and camshaft contains
The sensor array detection method is used to extract multi-dimensional data noise under steady and transient conditions [8]. The Wiener filter based noise component method is used for adaptive optimization, and the data set is divided into
Among them,
The method of changing the truncation position of window function is used to improve the time-frequency resolution of STFT for engine fault, construct a synthetic simulation signal to display the time-frequency characteristics of STFT, truncate the signal non integrally, so that there is a certain proportion of overlap between adjacent window functions, and obtain the clustering objective function matrix of KNN for the engine fault signal of new energy vehicles (define the clustering objective function):
Among them,
Among them,
In the time domain variable window width, calculate the time varying and adaptive optimal window of engine fault, compare the subclasses of the first category in the second layer, if
In the subclass of class k in class 1, S-transform is used to gradually transform the time-frequency diagram from low frequency to high frequency to obtain the S-transform time-frequency diagram of engine fault signal, as shown in Fig. 1.
S-transform time-frequency diagram of engine fault signal.
Although the concept of variable window width is introduced into S-transform in Fig. 1, the window width slows down with the increase of frequency. According to the signal acquisition results, the time-frequency characteristics of the engine fault signal are adaptively scheduled. By separating the mechanical excitation component from the battery excitation component in the radiated noise from the engine surface, and then using the attenuation curve, independent component analysis and empirical mode decomposition methods, the feature information in the engine fault signal can be more accurately extracted and transformed into feature vectors that can be used for classification and diagnosis, so as to achieve accurate detection and diagnosis of engine faults [11].
According to the time-frequency energy concentration degree of low frequency and high frequency parts, the KNN clustering model of engine fault signal is established, so that both high frequency and low frequency have better frequency resolution [12]. According to the time-frequency energy distribution and optimization idea, the fault correlation analysis is carried out in the direction of the frequency axis, and the directivity characteristics of engine fault characteristics are obtained as follows:
Among them,
Among them,
Where,
Among them,
Based on this data, an intelligent expert system is established, and the subsequent STFT transformation is carried out. The order of engine fault allocation is
IMF signals contain signals of different scales. Wavelet scale decomposition is used to obtain the decomposition results of fault signals as follows:
The bandwidth of the narrowband signal is determined by the penalty factor
Where,
Fault signal feature extraction
The wavelet transform is used to extract the fault features separated from the fault signal, and then the support vector machine algorithm is used to carry out fuzzy clustering processing on the extracted fault features of new energy vehicles, so as to realize the fault detection of new energy vehicle engines [14].
The vibration data sequence of new energy vehicle engine fault will be obtained
Calculation of prediction characteristic function of new energy vehicle engine under certain fault conditions
Where,
Analyze the information of rotating speed, voltage and other signals to get
(1) When
(2) When
Among the above,
Where:
Among them,
Infer and verify abnormal sound according to various digital signals collected in the experiment
Among them,
In the above formula,
Among them,
Structural model of engine fault feature extraction.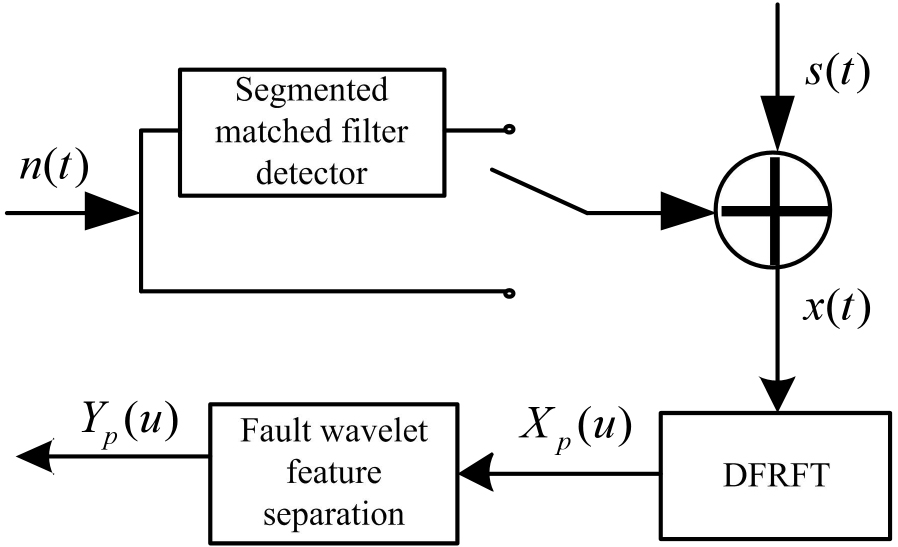
According to the above feature extraction results, time-frequency analysis of the fault signal is carried out in the fractional Fourier domain to extract time-frequency features, which can more comprehensively describe the time-domain and frequency-domain features of the signal, so as to effectively extract and diagnose the fault features in the signal [16].
Assumed input signal
Where,
Where,
Implementation flow of algorithm.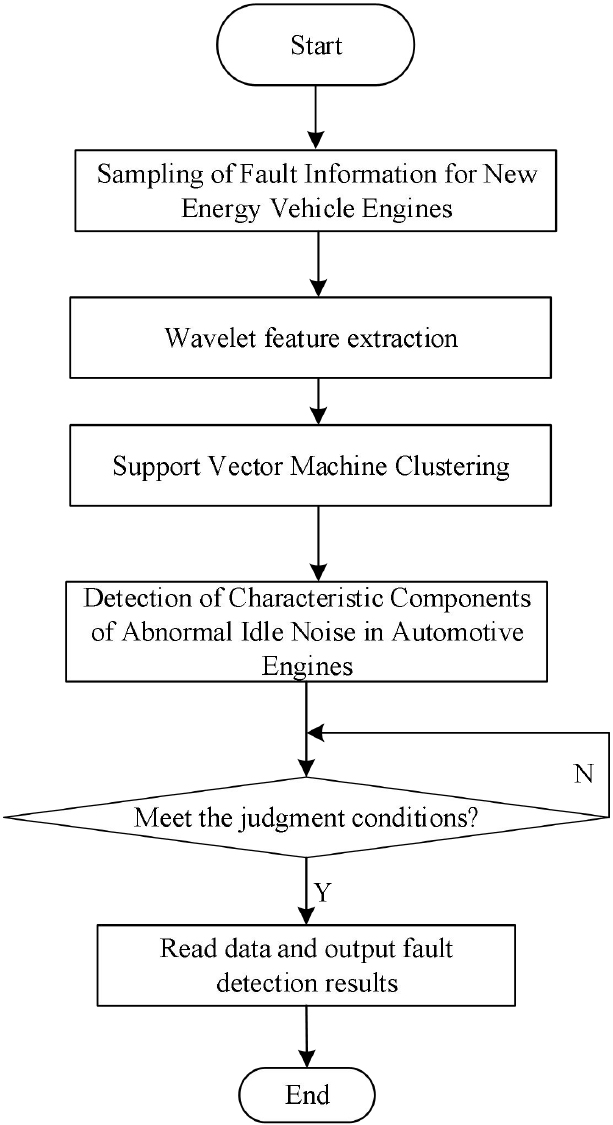
The fault signal is processed by fractional Fourier transform
In the experiment, the characteristic components of idle abnormal noise were extracted on the engine test bench in a semi anechoic chamber, and the engine was running at 700 rpm. Cut a window on the engine timing cover, and install a BAUMER speed encoder with a resolution of 720 PPR (pulses per revolution) on the inlet camshaft (reference shaft) through the window. Place three Kulite pressure sensors (XCEL-100 type) on the wall of the OCV valve, which are respectively connected to cavities A and B of the camshaft adjuster and their oil supply pipe P. Install two PCB vibration acceleration sensors on the intake side of the cylinder head: one is between cylinders 1 and 2 (number cy12), and the other is between cylinders 3 and 4 (number cy34). A BSWA microphone is placed on the exhaust side of the engine.
In the experiment, all physical signals are simultaneously collected by the Hyde acoustic data acquisition system at a sampling frequency of 48 kHz, and the steps are as follows:
Set data acquisition parameters: By configuring the Hyde Sound data acquisition system, set the sampling frequency to 48 kHz, and determine other parameters that need to be set, such as the number of channels, gain, etc. Connect the sensor/signal source: Connect the sensor or signal source that needs to be collected with the Hyde Sound data acquisition system to ensure the correct access of the signal source. Start data acquisition: Start the data acquisition process by operating the control interface or command of the Hyde Sound data acquisition system. Signal acquisition: The data acquisition system begins to collect physical signals, and continuously obtains sampling values from the sensor or signal source according to the preset sampling frequency. These sampled values are usually expressed in numerical form and stored in memory or on disk. Data processing: The collected physical signal can be further processed, such as filtering, amplification, denoising and other operations, in order to improve the signal quality and adapt to the needs of subsequent analysis. Data preservation: Store the processed data in a suitable format, such as text files, databases, etc., to facilitate subsequent data analysis and use. The specific channel number, measured signal and corresponding sensor position of the data acquisition front-end are shown in Fig. 4.
Layout of automobile engine fault information collection test bench and sensors.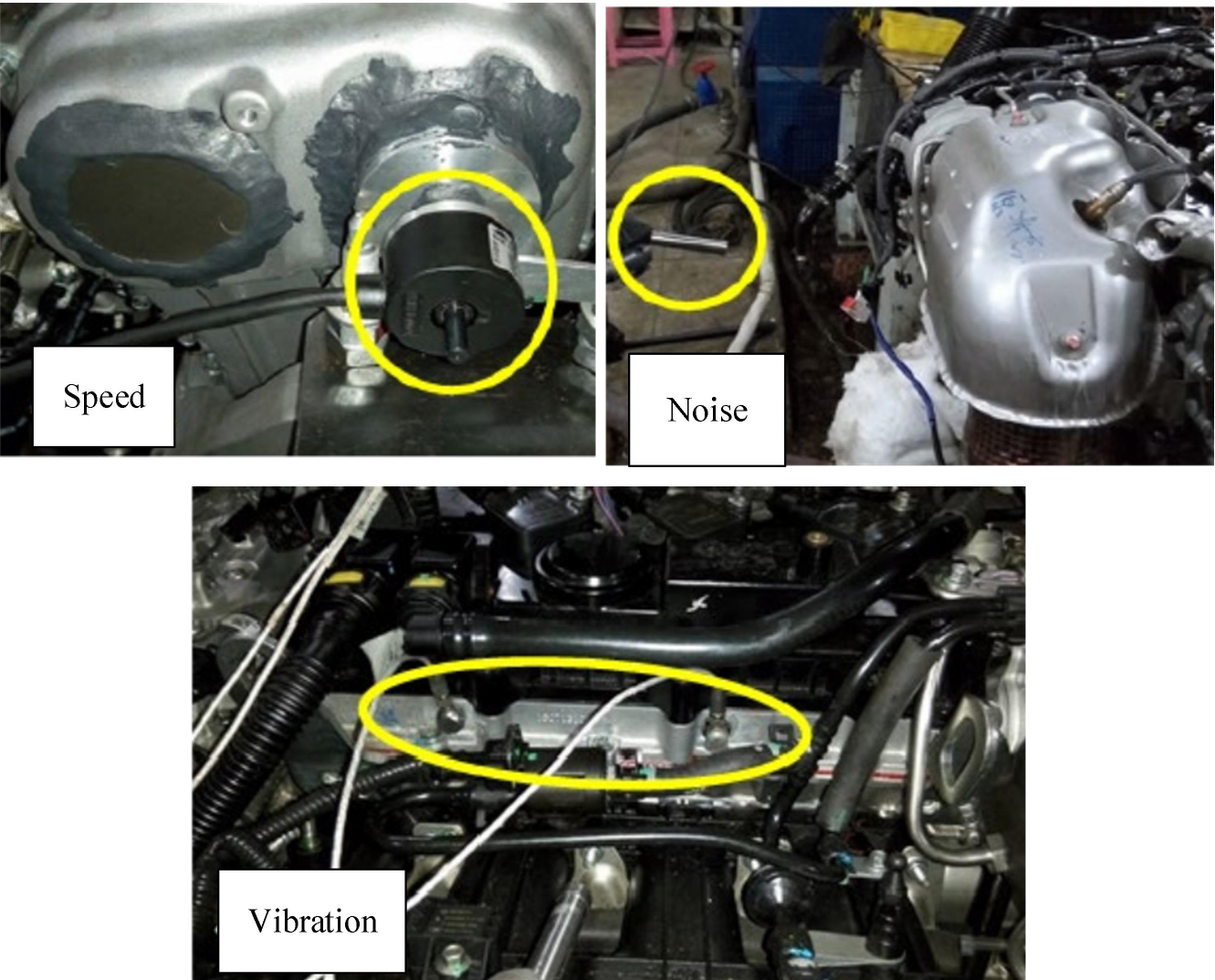
According to the above simulation test environment parameter settings, the vehicle engine fault signal is collected, as shown in Fig. 5.
Vibration and noise results.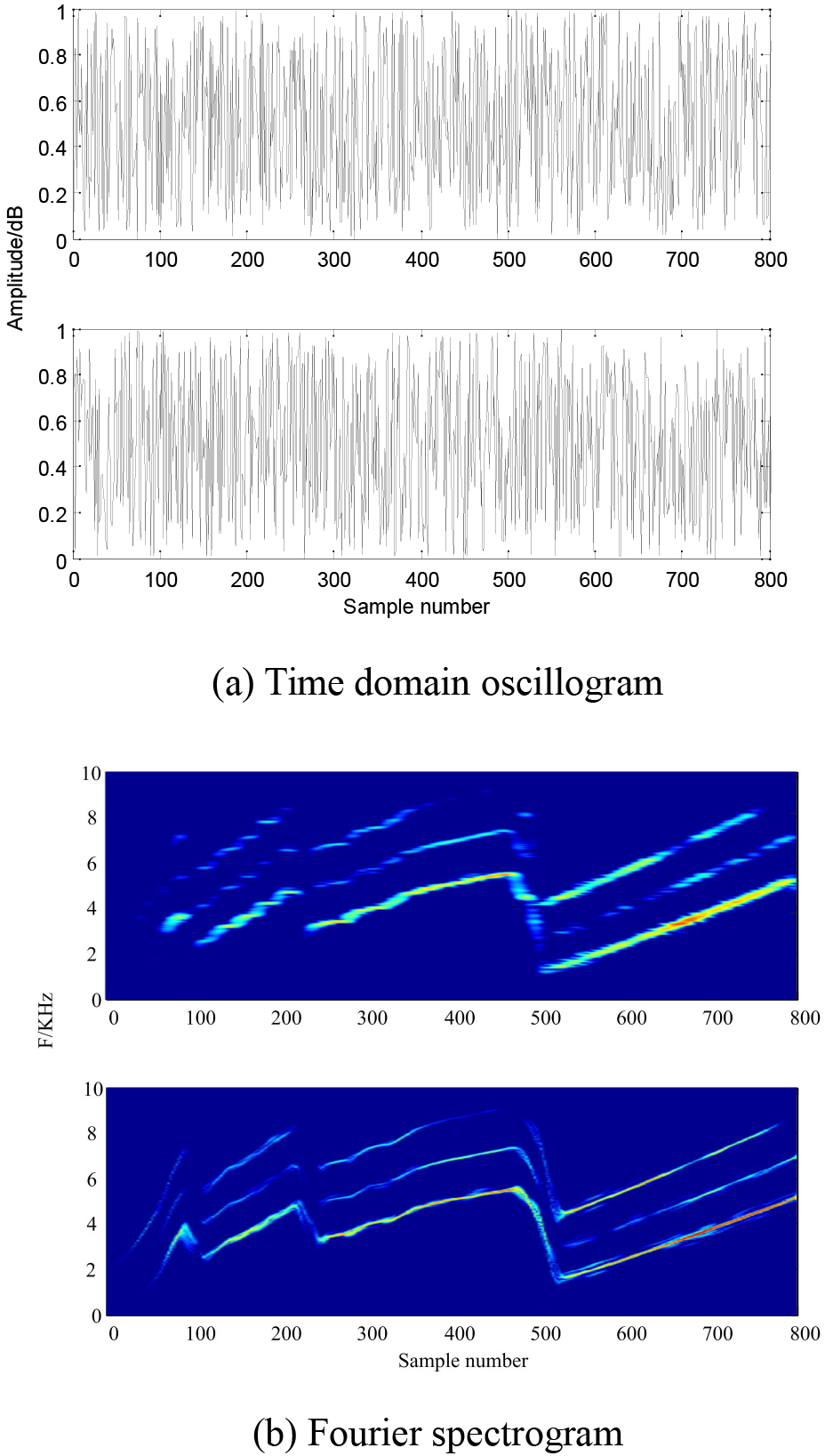
According to the analysis of Fig. 5, the collected vibration and noise signals of the automobile engine are analyzed for fault characteristics, and there is a peak value in the A-weighted sound pressure level spectrum of the exhaust side noise within 400
NLCT time-frequency diagram of three components of fault detection.
Since the frequency band of idle abnormal noise is 400
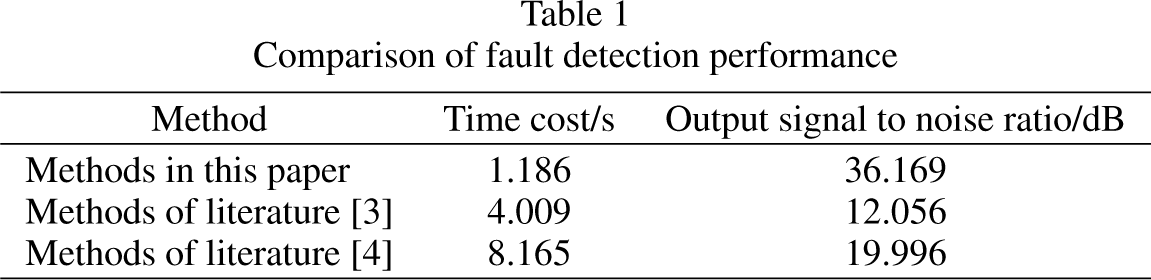
Comparison of fault detection performance
Comparison of fault signal detection performance.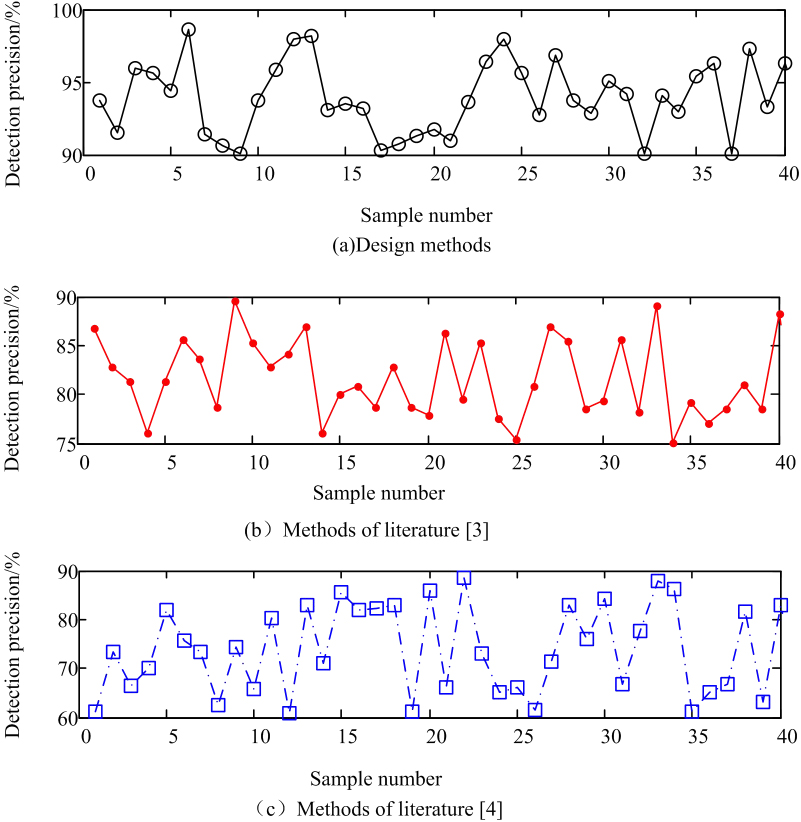
According to the analysis in Fig. 7, the detection accuracy of the proposed method is between 90% and 98%; the [3] method is between 75% and 90%; and the [4] method is between 60% and 90%. Since this method is combined with the SVM algorithm for fuzzy clustering of the extracted new energy failure features, specifically, SVM can classify and diagnose using the extracted feature vectors. Fuzzy clustering can divide data points into multiple fuzzy categories, which can better handle the uncertainty and ambiguity between data and thus more accurately describe the characteristics of the data. By combining SVM and fuzzy clustering, the fault signal of the new energy vehicle engine can be effectively processed and accurately classified, so as to improve the detection performance of the fault signal.
It can be seen from the analysis in Table 1 that the fault detection time of the design method is less, and the output signal has a higher signal-to-noise ratio, which can more accurately detect the existence of the fault signal, thus improving the performance of fault detection. This method can better capture useful information in the engine fault signal by separating the mechanical excitation component from the battery excitation component. Then, attenuation curve, independent component analysis and empirical mode decomposition are used to extract the characteristic information of the signal to realize the rapid detection and diagnosis of engine faults.
The proposed method is used to extract fault features from fault signals, and the extraction results are shown in Fig. 8.
Comparison of fault feature extraction results.
It can be seen from Fig. 8 that due to the large amount of noise in the diagnosis process of the engine fault of new energy vehicles, the fault signal is unstable, and there are a large number of false peaks, which lead to the difficulty of fault diagnosis and easy error; The denoising effect of this method is obvious, the ridges in the figure are clearly visible, and the fault features have obvious aggregation effect, which shows that the proposed method has a high fault signal extraction ability and fault recognition rate.
In order to help the further development of new energy vehicles and improve the engine fault detection effect of new energy vehicles, this paper proposes a new energy vehicle engine fault detection method based on wavelet transform and support vector machine. According to the result of signal acquisition, the time-frequency characteristic of engine fault signal is adaptive scheduling. Then, according to the signal acquisition results, the time-frequency characteristics of the engine fault signal are adaptive scheduling. Finally, the mechanical excitation component and the battery excitation component in the engine surface radiation noise are separated, and the fault features are extracted by wavelet transform, combined with the support vector machine algorithm, and the extracted fault features of new energy are fuzzy clustering. Four kinds of cylinder head substructure replacement schemes are used to carry out experimental research, and the fault structure model of the engine is extracted by wavelet transform feature to realize fault detection. According to the test results, the application of the design method can improve the fault feature clustering effect, the fault detection accuracy is higher than 90%, and the fault detection time cost is smaller, better than the comparison method, and the application effect is good.