
Abstract
BACKGROUND:
Work-related musculoskeletal disorders (WMSDs) are a serious problem, and manual material handling (MMH) tasks remain common in most industries. Thus, a lightweight and active exoskeleton is needed.
OBJECTIVE:
A facile, convenient, multifunctional, wearable lumbar support exoskeleton (WLSE) was proposed to relieve the muscular tension and fatigue especially in the way of WMSDs.
METHOD:
Based on the screw theory and virtual power principle, the parallel structure was used as the scheme choice for selecting suitable actuators and joints. The exoskeleton, which was characterized by high adaptability and complied with human motion, included branch unit, mechanism branch units, control units and sensors. Furthermore, using surface electromyography (sEMG) signal evaluation, an experiment which contains several tests was designed to evaluate whether WLSE had effect on supporting and reliving muscular fatigue while lifting-up different weight of objects under wearing without traction (T1) and wearing with traction (T2).
RESULTS:
Data collected were analyzed statistically by the two-way ANOVA. It showed that the RMS of sEMG was obviously reduced while carrying the heavy objects with WLSE under T2, and the MF values always performed the decreasing trend in T2/T1.
CONCLUSION:
This paper proposed a facile, convenient, multifunctional WLSE. From the results, it was concluded that the WLSE was significantly effective in reliving the muscle tension and muscle fatigue while lifting to prevent and treat WMSDs.
Introduction
Work-related musculoskeletal disorders (WMSDs) are a serious problem which accounts for 33% of all occupational injuries and illnesses [1]. Manual material handling (MMH) tasks remain common in most industries despite increasing trends toward automation according to the former study [2]. These tasks can significantly load a worker’s lumbar spine if the worker lift heavy object or take over other physical demanding activities, and are the main cause of lower back injuries and occupational disorders [3–5]. Relevant statistics showed the population of disability caused by lower back pain (LBP) is 7.7 million in 2016 in China [6]. Tremendous loss may occur to injured workers and their families even including related social costs [7]. Treatments of LBP and other WMSDs generally include medication, physiotherapy and surgical treatment which are not only expensive but inefficient [8]. Compared with the surgical treatments of WMSDs, the use of external devices to assist the muscle and joint of human body can reduce risk of the muscles disease, and support exoskeletons are emerging as a promising technological aid for counteracting the occurrence of WMSDs in these years [8–10].
Support exoskeletons divided into “active” and “passive” are trying to be developed to reduce the fatigue of back muscles of the human body [11]. Heo et al. [12] developed a backdrivable and fully-portable pneumatic back support exoskeleton with micro-compressors, the total weight of the exoskeleton was about 10.5 kg. It was not difficult to imagine that the wearer’s load was high during using them and the process of wearing was troublesome. Kawai et al. developed an electric motor-assisted device which can aid with torso flexion and extension and reduce the compression force on the lumbosacral disc. But their first and second devices weighed 11 kg [13] and 6.5 kg [14], respectively. They were very inconvenient for workers to keep one posture for a long time. Kwangwoon University [15] designed an active back-support exoskeleton which had effect but not significant during lifting load from floor. It was attached around the wearer’s shoulders, waist, and thighs. This way of wearing was not so comfortable. Von Glinski et al. [16] proposed the Hybrid Assistive Limb Lumbar Type (HAL for Care Support), it had a half-annular lumbar casting frame to aid with lumbar spine in lifting heavy objects, but the frame limited movements of the lumbar spine. Robo-Mate [17, 18] provided three additional passive degrees of freedom including twisting the torso, hip abduction and adduction, and hip internal and external rotation, while the degrees of freedom of the lumbar spine, such as backward extension, would still be limited. There were many active exoskeletons like this, which can assist in handling and reduce EMG activity but limit the movement of the waist such as hyundai waist assistive exoskeleton (H-WEX) [19], soft suit exoskeleton [20], and so on. Additionally, Smart suit that reduced about 14% of average muscle fatigues when extension or flexion. But it was not easy into the workplace because 24 V DC power supply was difficult to carry around. Then, several passive support exoskeletons, such as person lift assist device (PLAD) [21], HappyBack [22], and mobility enhancement robotic wheelchair exoskeleton (MeBot-EXO) [23], have been proved to provide positive effect on forward torso flexion. However, these exoskeletons reduced muscle activity all only use spring elements to realize passive assist.
The purpose of this study was to present a portable, lightweight, and active exoskeleton. According to the screw theory and virtual power principle, the suitable actuators and joints were chosen. Then this paper mainly evaluated the muscle activity by using surface electromyography on wearer’s lumbar erector spinae and thoracic erector spinae during handling heavy objects vertically, the results of the muscle activity were analyzed to test the effectiveness of the wearable lumbar support exoskeleton (WLSE).
Materials and methods
Design of wearable lumbar support exoskeleton (WLSE)
The degrees of freedom of lumbar spine that is composed of 23 intervertebral disc should be taken into account before the design of lumbar exoskeleton [24]. In order to relieve lumbar muscle fatigue during lifting objects, the wearable lumbar support exoskeleton (WLSE), which applied the principle of parallel mechanism, was designed. It can also accomplish rotation of lumbar around the coronal axis, the sagittal axis and the vertical axis. The proposed robot leveraged on a less freedom parallel mechanism, as shown in Fig. 1. The components of the WLSE included branch unit, mechanism branch units, control units and sensors. The branch units consisted of electric linear actuator (L16-100-150-12-P, RS) and two ball bearings (RBPB5, MISUMI), one was designed to adjust the range of support, another one was regarded as rotational mechanism to ensure the range of human torso. The mechanism branch units combined support board with wearing straps. Wearing straps as important structures, which matched WLSE with human body, were divided into elastic belts, fixed straps and telescopic belts. The support boards, which had both good toughness and certain rigidity, were made of ABS/PC materials by membrane technology, it can be able to ensure the adaptability of the exoskeleton. The control units contained software and hardware platform construction, hardware platform embodied sensor module, wired communication module, electro-circuit of control driver and Wi-Fi module. The WLSE were attached around iliac crest and the eleventh rib edge to ensure a high fit. The WLSE can produce a maximum force 200 N under the rated operating conditions, and the whole machine is about 2 kg.

Wearable lumbar support exoskeleton (WLSE). This picture showed status of wearing WLSE. The WLSE were attached around iliac crest and the eleventh rib edge to ensure a high fit.
This section derived kinematics and dynamics modeling to determine the selection of the motor driver. Additionally, the above kinematics and dynamics data can be used as reference for control strategy.
The design of WLSE adopted the 4-SPS structure called underactuated parallel structure. The branch of underactuated parallel structure contained more kinematic pairs, whose kinematic analysis was more difficult, and the corresponding Jacobian matrix was hard to establish [25]. In order to solve this problem, a bio-fusion WLSE was proposed that was composed of a mechanical mechanism and a human torso.
A global reference frame was attached to the center of the fixed platform, for which the X-axis was located to the center of the fixed platform, the direction was horizontal to the left, and the Z-axis pointed up vertically. The coordinate system of the moving platform (waist platform) was parallel to the coordinate system of the fixed platform (pelvis platform). In this paper, there were flexion of 35° in the sagittal plane, the lateral flexion of 35° in the frontal plane, the rotation of 25° in the transverse plane, and the stretching up to 20 mm along the transverse plane, these set parameters can ensure to not restricted the natural motion of a wearer.
Position analysis
Bio-fusion WLSE can be simplified as shown in Fig. 2. The four monitor drivers on both sides were called as prismatic joints, and the input variables were defined as l1, l2, l3, l4 The posture of the moving platform represented the posture of the waist movement, which were flexion (α), lateral flexion(β), rotation (γ) and stretching (ΔZ). The position vector of the spherical joint Bi in the moving coordinate system was
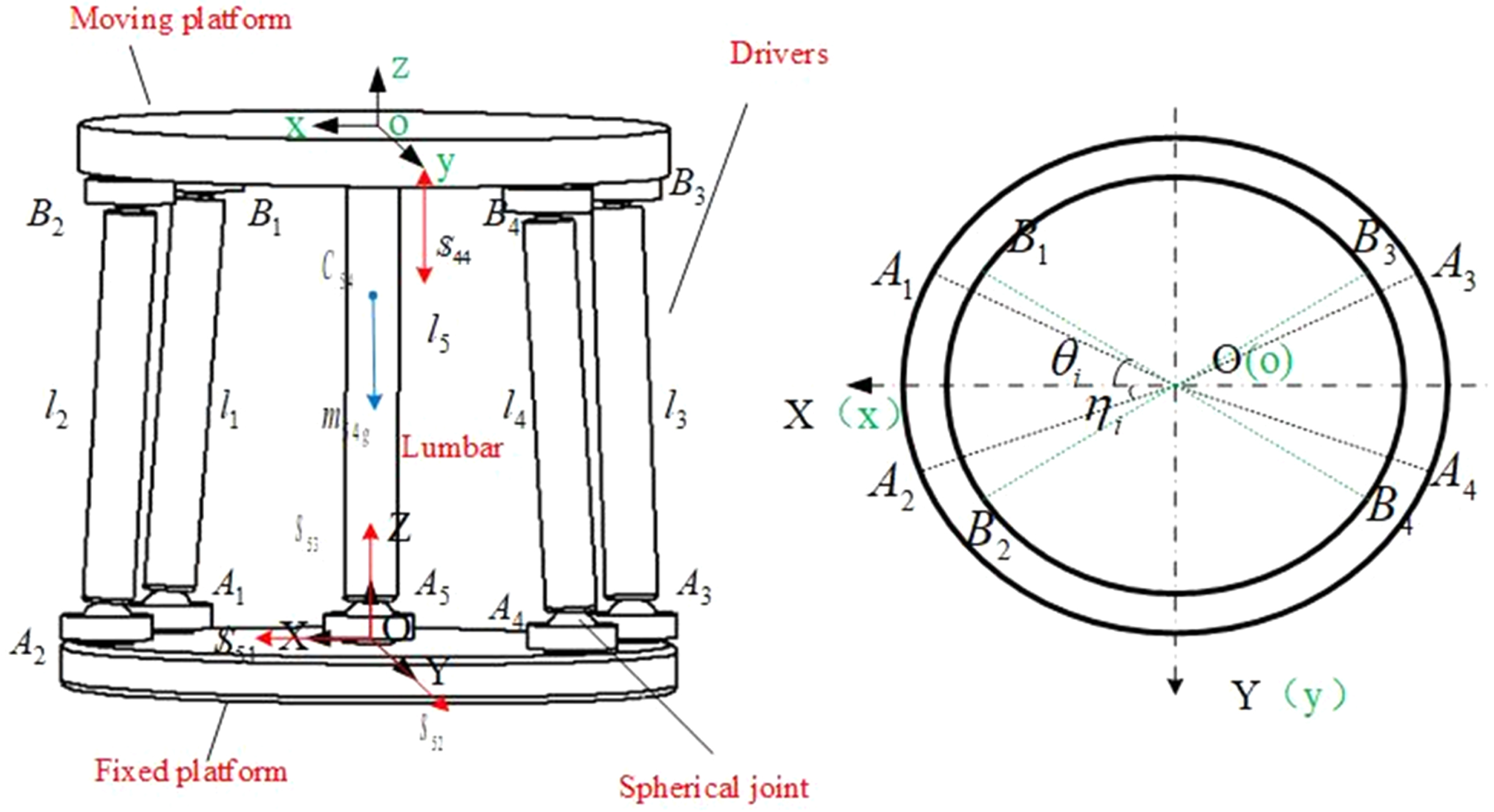
The bio-fusion exoskeleton. On the left picture, human lumbar spine was simplified to 1-SP link and WLSE was simplified to 4-SPS parallel structure including moving platform, drivers, fixed platform and spherical joints. The right picture was showed the specific locations of spherical joints in the coordinate system.
The position vector of the spherical joint Ai in the fixed coordinate system was
where θ1, η1represented the installation angle of prismatic points in moving platform and fixed platform, respectively. R and r represented the radius of circle of hinge points. cγ represented cosγ, sγ represented sinγ and the others were the same.
According to pitch-roll-yaw angle, the rotation matrix was
Each link in Fig. 2 can be expressed in the vector form as
The speed and acceleration of the 4-SPS&1-SP parallel robot branches were analyzed using the screw theory, taking the first link (i.e., the SPS link) as an example here. As shown in Fig. 3, the twist system of the first link in O-XYZ was written as

Exploded view of branch chain of the left picture. The branch chain contained end cover of ball bearing, ball bearing, electric putter (driver), connection cavity and pressure sensor. Screw system of active link 1was showed on the right picture. The left and right figures were corresponding, electric putter was corresponding with limb11 and limb12, and two ball bearings were showed with
In the screw theory, the instantaneous motion of parallel manipulators (PMs) was described as a screw system, and it was summation of all links [27]. The instantaneous velocity
Park et al. [28] referred that the acceleration relation between link i frame to the center mass of link i can be described as
The first linear motor called the first link can be simplified to
Similarly, the human lumbar can be simplified as 1-SP link, therefore 1-SP link can be indicated as
and
Moreover, Zhao et al. [29] indicated that from the screw theory, the dual part of the twist can be expressed as
When the velocity and acceleration of moving platform were given, the speed and acceleration screws of every link which can be substituted into Equation (15) can be found out, and the velocity and acceleration of mass center can be solved.
The inverse dynamic analysis adopted the new concept of virtual spiral which was proposed by Fan et al. [27], who used virtual angular velocity and virtual linear velocity to construct the dynamic equation of the parallel robot.
In equilibrium, the principle of virtual powers (PVP) was written as the sum, and it was formed by inertial effects, gravity and external forces of the body moving using a virtual velocity which was equal to zero [30].
Where P ine , P gra and P ext denoted the powers developed by inertial effects, gravity and external forces, respectively. Each power was calculated by the product of force and virtual velocity.
Fan et al. defined the concept of virtual screw which was different with the previous method [27]. In this paper, inverse dynamics was solved by virtual screw. The virtual power can be described as
The Equation can be described as
The sum of the virtual power was
According Equations (7) and (8), the inertial effects, gravity and external forces were
Virtual screw was used to express the angle velocity and linear velocity of moving platform
The virtual screws of links can be solved when solving all the wrenches. Bring a given virtual screw of moving platform δ/
Dynamic simulation of the mechanism was performed to understand the output force and length of the drives during various lumbar motion processes. The centroid inertia and masses of all objects in the local coordinate system were shown in Table 1. According to the setting range of lumbar spine motion, the various movements of the lumbar spine were expressed as STEP function
All bodies’ masses and centroidal body inertia matrices
All bodies’ masses and centroidal body inertia matrices
According to the given law of motion and the force of the lumbar under various conditions in the literature, the force to lumbar for static positions was up to 350% of a person’s weight while bending the body by moving the fingers to the toes [31]. External force on the moving platform was set by Equation (29) [32]. Applying the data in Table 1, the kinematics and inverse dynamics numerical solutions were obtained, as shown in Fig. 4.
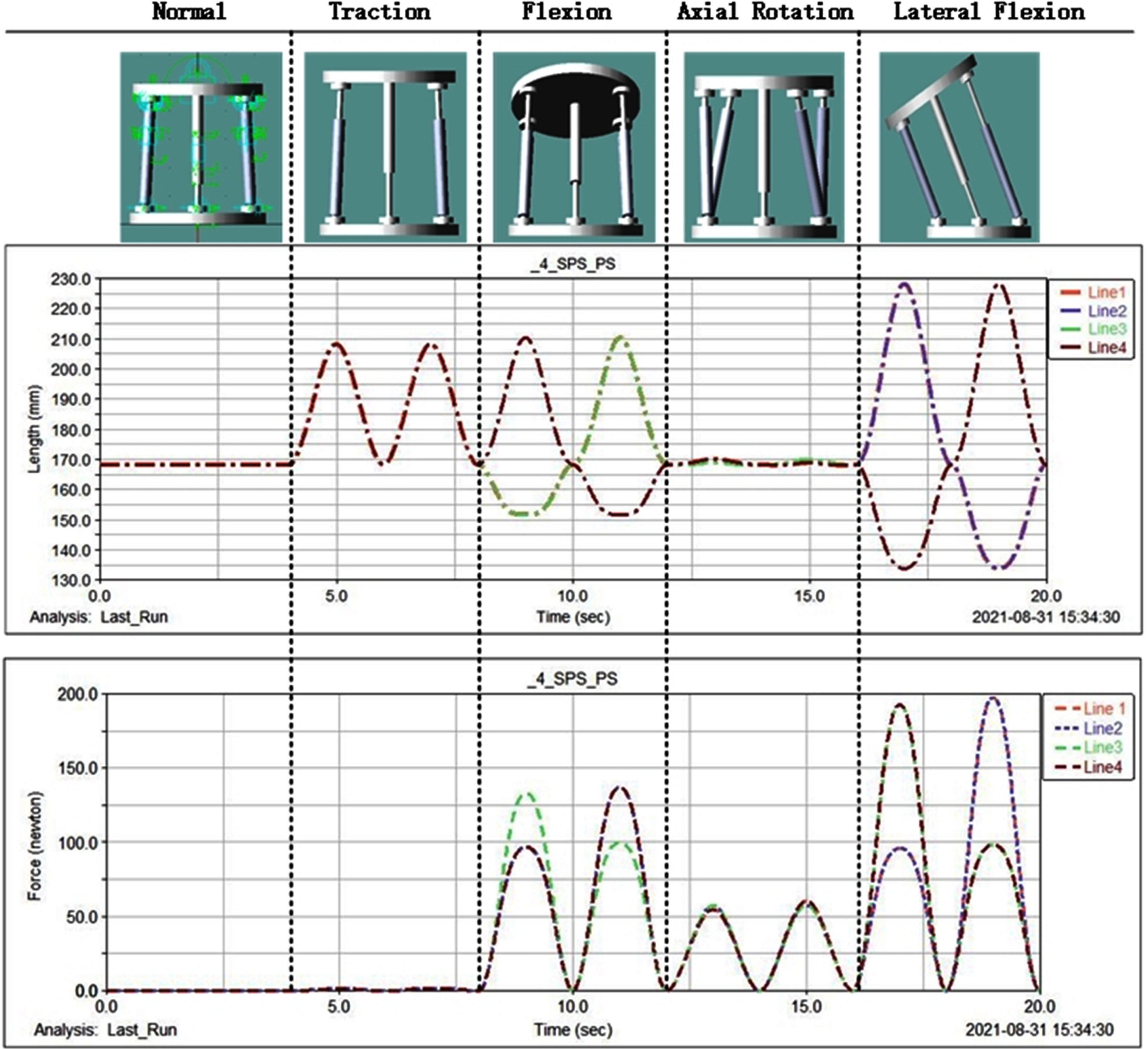
Four input force of actuators using ADAMS. In this picture, the length and force of actuators were showed in normal state, traction state, flexion state, axial rotation state, and lateral flexion. The motion curves from actuator 1 to actuator 4 were represented by line 1 to line 4 respectively.
From Figs. 4 and 5, the maximum of force approached 200 N for each actuator when lumbar spine flexed at 35°. Meanwhile, the actuator reached the maximum extension length about 95 mm. Through simulation and model verification, it was confirmed that the wearer can move normally when the actuator was suitable in this study.
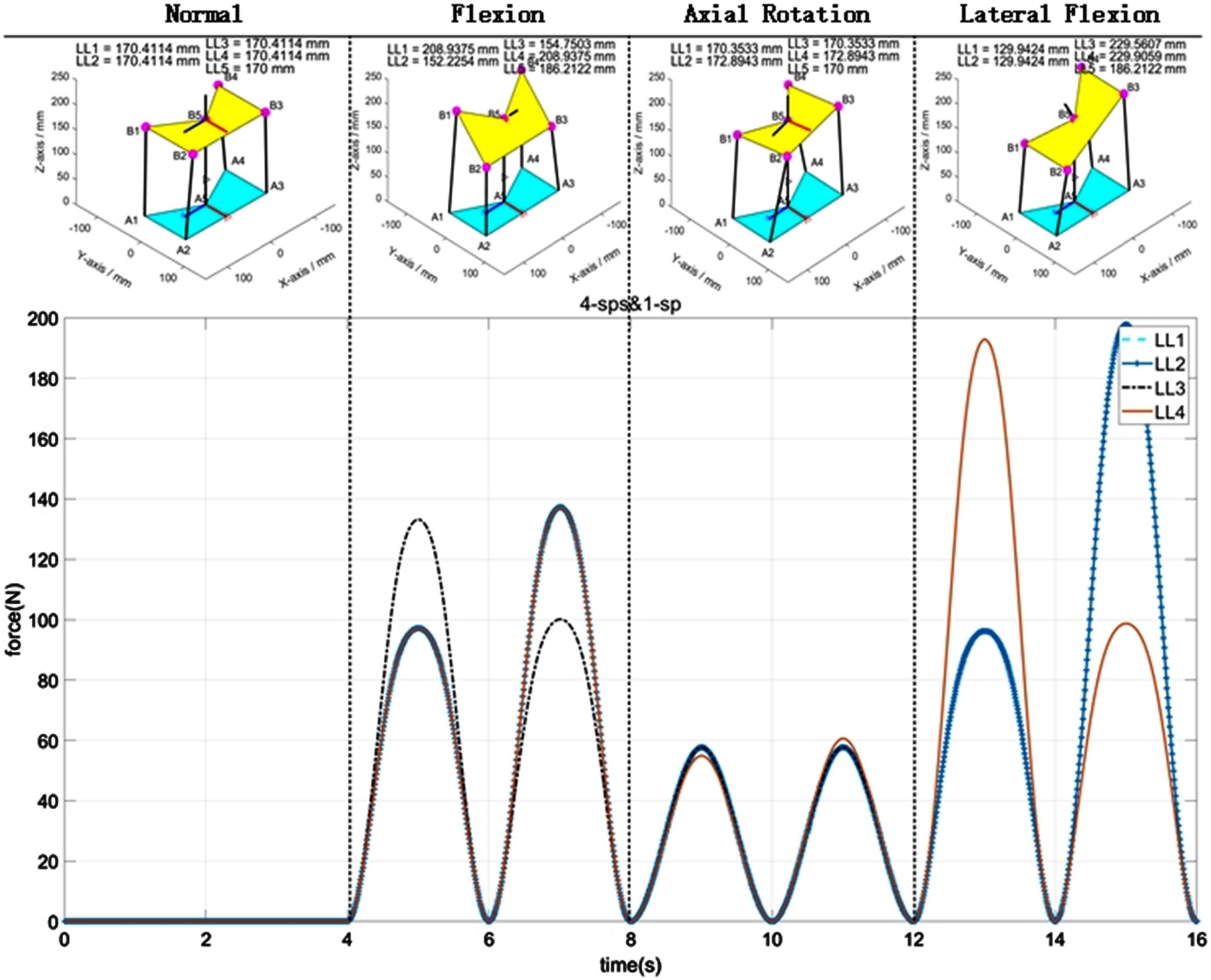
Four input force of the actuators using the screw theory. In this picture, the length and force of actuators were showed in normal state, traction state, flexion state, axial rotation state, and lateral flexion. The motion curves from actuator 1 to actuator 4 were represented by line 1 to line 4 respectively.
An experiment was designed to verify the support effect of WLSE. There were sex-specific risk factors of WMSDs, 20 male healthy subjects were recruited from the local university via displayed poster, social media and word of mouth. Subjects anthropometrics for control group (wearing without traction, T1) and experiment group (wearing with traction, T2) were described in Table 2. There was no significant difference between the two groups (all p > 0.05). Exclusion criteria included the presence of any signs or symptoms of medical “red flags” (e.g., rheumatoid arthritis, osteoporosis, and prolonged steroid use), a history of previous spine surgery, signs or symptoms of upper motor neuron disease, those with the complete loss of sensation along the involved nerve root, intractable pain, cardiopulmonary disease, malignant disease. All participants were asked to complete a consent form prior to the study, and the study procedure was approved by University of Shanghai for Science and Technology Ethics Committee, and the approval number was 2021-121.
Characteristic of control group (T1) and experiment group (T2)
Characteristic of control group (T1) and experiment group (T2)
Values are presented as mean (SD).
In order to ensure the quietness of the experimental environment, this experiment was implemented in a clam classroom. The experiment was divided into five steps, respectively keeping still (S1), lifting-up different objects weighed 5 kg, 7.5 kg, 10 kg from the desktop to the subject’s chest (S2), keeping moving 5 seconds (S3), slowly letting it down (S4), and finally slowly recovering the muscle to the rest state (S5). This experiment was set control groups and experimental groups, respectively T1 and T2. For each subject, each handling task was repeated ten times. The procedure of experimental protocols was illuminated in Fig. 6, and the mean of surface electromyography (sEMG) raw signals of T1and T2 were showed in Fig. 7.

Experimental protocol.
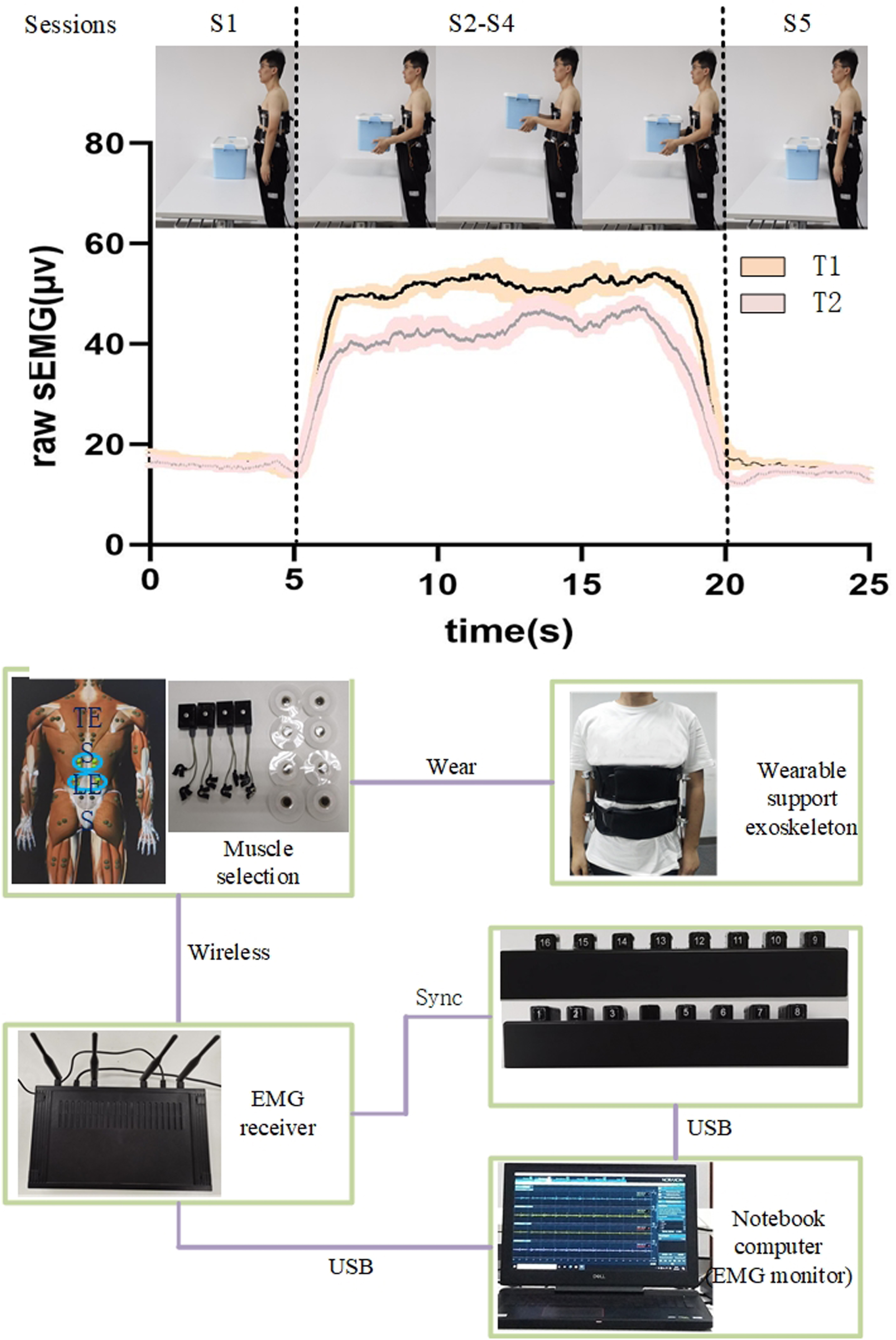
Raw sEMG during lifting and construction of the experiment platform. The first picture showed the mean and SEM of sEMG raw signal in a task under two different states (T1 and T2). The second picture mainly illustrated the process sEMG signal collection.
sEMG was used as an important indicator of the effectiveness of exoskeletons [33–35]. According to the main function of each muscle and combining with experimental characteristics, left lumbar erector spinae (LLES), right lumbar erector spinae (RLES), left thoracic erector spinae (LTES) and right thoracic erector spinae (RLTES) were chosen as test muscles [36]. Two electrodes were attached to the LES, 3 cm lateral to the L3 spinous process, and TES, 5 cm lateral to the T9 spinous process [37]. sEMG signals were collected, as shown in Fig. 7. The TelemyoTM Direct Transmission System (DTS) (Noraxon Inc., Scottsdale, AZ, USA) were used to collected the sEMG signals. It can achieve remote wireless telemetry by Wi-Fi, which made the data acquisition of the experiment convenient. EMG sensor data acquisition system has 16-bit resolution, initial sample rate 3000 Hz, CMR > 100 dB, and 100 ms RMS filter before wireless transmission. Single-differential signals were high-pass filtered (fc = 10 Hz), adaptive filtering was employed to reduce ECG noise. The EMG signal processing was analyzed with Myo-Research Master Edition 1.06 XP software. The sampling rate was set to 1,500 Hz and the amplified waveform was filtered using a 20-Hz to 450-Hz bandpass filter and a notch filter to remove 60-Hz noise. Channel signal must be checked to ensure the normal work of instrument when the experiment started.
The back muscles of the subjects were completely exposed, the surface of the skin was cleaned with alcohol to sufficiently remove oils such as grease, and the sEMG electrodes were attached to the back of the subjects.
Statistical analysis
The root mean square (RMS) and the mean frequency (MF) of sEMG signals were chosen to analyze, which can represent the degree of muscle tension and muscle fatigue [38–40]. Comparing with participants, RMS for all sEMG signal channels were calculated with a 50 ms running window, and the highest RMS obtained by each channel was used for normalization.
What’s more, all the MF were calculated using a fast Fourier transform (FFT).
In this paper, the datasets in the two modes were analyzed by two-way ANOVA. All datasets were expressed with means and standard deviation (SD) of means. The significance level was set at p < 0.05, and SPSS statistical software v.24.0 (IBM Corp., Armonk, NY, USA) was used to analyze the data.
Analysis of muscle tension
The two-way ANOVA of the normalized RMS about different weights in T1 and T2, as shown in Fig. 8, and Table 3 illustrated the results of RMS values and MF values about comparison of T1 and T2.

Mean and standard deviation of RMS amplitude of left lumbar erector spinae (LLES), right lumbar erector spinae (RLES), left thoracic erector spinae (LTES) and right thoracic erector spinae (RTES). Vertical lines represented 1 SD of the mean and the asterisks indicated the significant difference between different tests.
The mean RMS and the MF of four muscles carrying different weights in two modes
The mean RMS values in three tested tasks of lifting weights (5 kg, 7.5 kg and 10 kg) showed that the vertical lifting weights had no significant effect on the left thoracic erector spinae (LTES), right thoracic erector spinae (RTES), left lumbar erector spinae (LLES), right lumbar erector spinae (RLES) whether wearing without traction (T1) or wearing with traction (T2), but mean RMS values increased slowly as the weights increased on the whole.
The difference of RMS in T2/ T1 was obviously seen. For thoracic erector spinae (TES) (i.e. LTES and RTES), significant differences were observed when the objects were 5 kg (p = 0.04 and p = 0.004, respectively), the values of RMS of T2 decreased significantly compared to T1 from 7.5 kg to 10 kg (LTES: –15.04% to –11.89%, RTES: –16.89% to –16.52%), as shown in Table 3. For lumbar erector spinae (LES) (i.e. LLES and RTES), Table 3 showed the reduction of RMS values decreased monotonically under T2 compared to T1 from –12.87% to 16.67% for LLES, and –14.97% to 17.25% for RLES. Specifically, for LLES, during users lifting 10 kg loads, the reduction of RMS value about RLES was very significantly (p = 0.03), as shown in Fig. 8.
The two-way ANOVA of the MF values about the LTES, RTES, LLES and RLES in each tested task were shown in Fig. 9.
The mean RMS values in three tested tasks of lifting weights (5 kg, 7.5 kg and 10 kg) showed that the vertical lifting weights had no significant effect on the MF values of LTES, RTES, LLES, RLES whether T1 or T2, as the same of the RMS values, but MF values declined slowly as the weights increased on the whole.
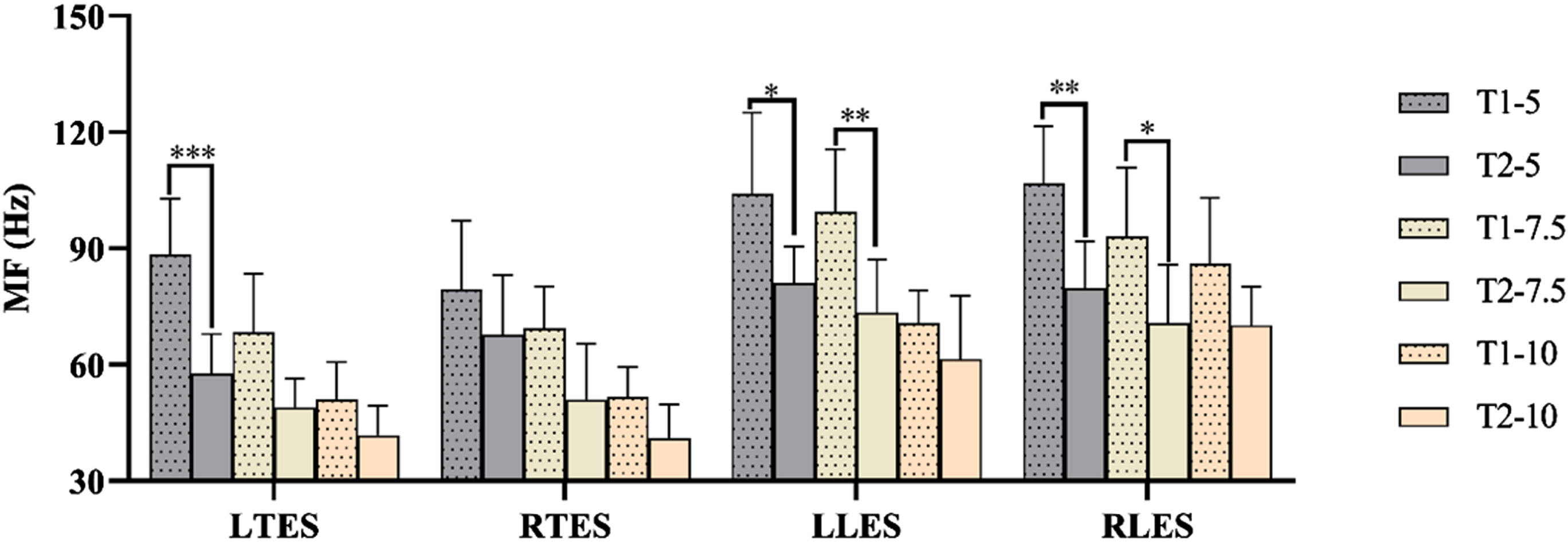
Mean and standard deviation of MF amplitude of left lumbar erector spinae (LLES), right lumbar erector spinae (RLES), left thoracic erector spinae (LTES) and right thoracic erector spinae (RTES).
The analysis of the MF values of the tested muscles (i.e. LLES and RLES) indicated significant differences about T2/T1in lifting 5 kg (p = 0.03 and p = 0.00, respectively), as well as in lifting 7.5 kg (p = 0.00 and p = 0.04, respectively), and there was decline in lifting 10 kg (LLES: 13.1%, RLES: 18.3%). For TES (i.e. LTES and RTES), in each lifting weight task, the MF values always performed the decreasing trend in T2/T1, as shown in Table 3. Especially in lifting 5 kg, there was significant difference (p < 0.01), as shown in Fig. 9.
This paper presents an active wearable lumbar support exoskeleton (WLSE) as an intervention to reduce work-related musculoskeletal disorders (WMDs) with handing the objects vertically. The EMG experiments were conducted to assess to effectiveness of the WLSE by quantifying the RMS amplitudes and the MF from the EMG signals at the LLES, RLES, LTES, and RTES locations. When lifting different weights, the decreases in the MF and increase in RMS amplitude were shown that fatigue of skeletal muscle can cause reliable and predictable changes to EMG signal characteristics [41, 42]. The results of the experiment showed that the RMS of sEMG was obviously reduced while carrying the heavy objects with WLSE under T2. That was consistent with the conclusion reached by Potvin et al. [39]. Some other active exoskeletons also significantly reduction in the muscle activities of LES (RLES: 11%, LLES: 16%) were confirmed when active back-support exoskeleton was worn [15, 43]. The LES results especially lifting 10 kg concur with those of active exoskeleton proposed in previous studies. For the TES, the RMS value was obviously reduced especially lifting 5 kg vertically, as the same with the conclusion reached by Godwin et al. [44]. However, these evaluations included only one to three participants, and thus, statistical tests were not performed. The extent of reduced muscle activity differed for each subject, and this might be related to their different weights and heights. Specifically, the placement of the WLSE with respect to the human body was varied for different body heights. The MF of sEMG, a key indicator of muscle fatigue, has been proved to reduce obviously by the result, it meant the WLSE can reduce the muscular fatigue of LES and TES. However, compared to the work of Christy A. Lot [45], the current study was not accurate to give a criterion level for the presence of localized muscle fatigue [46, 47].
Current research has some deficiencies. First, the study was conduct one posture, whereas the experiment of evaluating the effectiveness of H-WEXv2 showed that the postures of lifting objects also affect the muscle activity of muscles [19]. During repetitive lifting tasks, lateral bends are often required, but the maximal angle of the lateral flexion in T2 was 35°. Second, the testing was in a laboratory environment which is different from the actual environment. However, a highly beneficial effect was implied, the whole weigh is 2 kg, compared with many other lumbar support exoskeleton, it was lightweight. The outcome of this paper may provide evidence of a potential alternative application for the family and hospital, especially industry. Furthermore, the advantage is more prominent in WLSE’s amenity, the WLSE can have a close match with the wearer.
Conclusion
This paper proposed a facile, convenient, multifunctional WLSE. The WLSE combined traditional active support exoskeletons with parallel mechanism, and replaced the disadvantages of traditional back support exoskeletons that were larger and heavier. The experiment evaluation of the WLSE was conducted. It was shown through lifting different objects under wearing without traction (T1) and wearing with traction (T2) and analyzing the root mean square (RMS) and the mean frequency (MF) of sEMG. The results showed that the WLSE had a positive effect on reducing muscle activities and muscle fatigue.
The limitation of the present study is that the control strategies of the WLSE was not perfect. The improvement of control strategies will further enhance the comfort of wearing. Also, flexible unit will be considered in the future to prevent secondary damage to the human lumbar spine during the support process.
Ethical approval
The study procedure was approved by the University of Shanghai for Science and Technology Ethics Committee (approval number 2021-121).
Informed consent
All participants provided informed consent.
Conflict of interest
The authors have no conflict of interest to declare.
Footnotes
Acknowledgments
The authors are grateful to all the individuals who participated in the study.
Funding
This work was supported by the National Key R&D Program of China (2019YFC1711800) and the Shanghai Action Plan for Scientific and Technological Innovation (20S31901100).