The nonlinear programming (NLP) model is often encountered when developing an optimal model for design of water treatment. In recent years, researchers have studied numerous NLP solutions. However, some solutions are convergent but nonoptimal whereas others that are convergent and optimal are time consuming and costly to solve, because more than half of the calculations are for satisfying the constraints. Hence, a new concept of flexible tolerance is proposed in this research by allowing a tolerance for each constraint. In the process of calculations, the tolerance is reduced gradually so that it approaches zero when the optimal solution is reached. Therefore, many pull-in operations will become unnecessary, thus leading to more efficient and cost-effective solutions. For practical application, a stochastic optimal water treatment plant design model was developed using the hydrological and water quality data of an existing water treatment plant in Taiwan. A proposed new method for solving NLP problems is applied to solve for the optimal solution; results are then verified by comparing with the field data. Due to the limitation of article length, sensitivity analysis is not included in this article. Research results can be used by policy makers to develop a highly reliable water treatment systems under conditions of uncertain water quality.
Introduction
In Taiwan, the traditional design is still adopted to use the average (mode or median) of water quality data for designing water treatment plants (Taiwan Water Co., 2009). The operation of such water treatment plants will face great risks. In fact, an unstable influent water quality leads to uncertainty that can only be addressed using a stochastic optimal design model. In the stochastic model, a smaller probability (α) leads to lower risk and higher reliability (Wu and Chu, 1991).
Models for solving environmental system problems are practically nonlinear, including objective function and constraints. Hence, the model should be solved using nonlinear methods, but the problem of nonlinear planning is more difficult to solve (Li and Wu, 1988). The nonlinear programming (NLP) solution has been studied by researchers for more than 20 years. Although new solutions have been continually proposed, no ideal solution has been shown to solve current problems (Bett, 1975; Fletcher, 1981; Dykstra, 1984; Kao et al., 2005). This is mainly because many factors cause the solution to stop at a nonoptimal point (Chang and Wang, 1995; Kao and Chen, 2006).
Using the concept of tolerance in a flexible simplex method for solving NLP problems is theoretically feasible. However, when the number of variables exceeds 7 or 8, the simplex deteriorates to greatly reduce its efficiency in addition to becoming inefficient (Paviani and Himmelblan, 1969; Himmelblan, 1972) and, hence, the method based on flexible tolerance concept has not been applied.
Kao et al. (2005) reproposed the flexible tolerance concept, which tolerates in the process of calculations; the tolerance is reduced gradually; it approaches zero when the optimal solution is reached. In this way, many pull-in operations will not be necessary any more, so intuitively this is a feasible idea. This is the concept of flexible tolerance.
The proposed research consists of four methods: method of feasible directions, flexible simplex method, quadratic approximation method, and multipliers method. These methods are implemented to cope with the concept of flexible tolerance. Computer software is developed for solving these methods based on factors such as convergence, rate of convergence, accuracy, core memory needed, and the ease of use. The multipliers method has the best performance in all these considerations (Kao et al., 2005).
Results of the above proposed research are presented in this article. Due to limited space, the presentation only covers the basic theory of multipliers method and the procedure of establishing the method based on concept of flexible tolerance for effectively solving the NLP problems.
The research is based on the case study of an existing water treatment plant without using the deterministic model, because this model contains numerous simplifications and assumptions of the complex process in addition to using inadequate formulations that do not reflect parameter uncertainty (Obropta and Kardos, 2007). On the contrary, the hybrid approach assumes that the source of complex behaviors is both intrinsic and extrinsic due to stochastic influence (Vojinovic et al., 2003). This approach has strong potential for causing model prediction error and uncertainty. Hence, the stochastic model should be developed to alleviate these problems. Usually, two methods, that is, the two-stage stochastic and the chance-constrained stochastic methods are considered. The two-stage stochastic is not as applicable as the chance-constrained stochastic method for developing water treatment plant optimal models (Wu and Chu, 1991). In this research, the chance-constrained stochastic method is used to impose probability on the various constraints for controlling the reliability and risk of the constraints applied so that the most optimal model solutions can be obtained under reliable constraints (Kao et al., 2008).
In fact, analyses have made astonishing progress in the field of water resources and environmental systems. For example, a hybrid of interval linear programming (ILP), stochastic robust optimization (SRD), and two-stage stochastic programming (TSP) has been developed to handle multiple uncertainties (Xu et al., 2009). Fuzzy modeling is an efficient technique for describing nonlinear biological process (Steyer et al., 1997; Yen et al., 1997; Fu and Poch, 1998; Tay and Zhang, 1999, 2000). In the mixed-interval parameter fuzzy-stochastic robust programming, methods of interval-parameter programming, chance-constrained programming, and fuzzy robust linear programming have been integrated into a general optimization framework (Cai and Huang, 2007). The gray system theory, which requires only a small amount of data to result in better prediction results (Chang and Wang, 1995), has been adopted and applied for environmental optimization (Wu and Chang, 2004).
Since the main objective of this research is to apply the concept of flexible tolerance coped with the multipliers method for solving NLP problems, the case study is done using the water treatment plant that employs relatively simple operations and processes. The appropriate modeling method is proposed after reviewing the various relevant methods; the results executed using computers will be referenced.
Model Formulation
Flexible tolerance concept
There are two types of difficulty for solving NLP problems. First, in the process of calculation, the constraints are difficult to satisfy for reaching the optimal solution. Next, even if the optimal solution is obtained, many pull-in operations are required to suffice the constraints at all times. Therefore, the concept of flexible tolerance is proposed in this research by allowing a tolerance for each constraint. In the process of calculation, the tolerance is reached gradually; it then approaches zero when the optimal solution is reached. The problem is assumed as follows:
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}\begin{align*}
min.- x_1 - x_2 \\ s.t. - x_1^2 - x_2^2 + 4 = 0 , \\ x_1 \geq 0
\\ x_2 \geq 0 \tag{1}
\end{align*}\end{document}
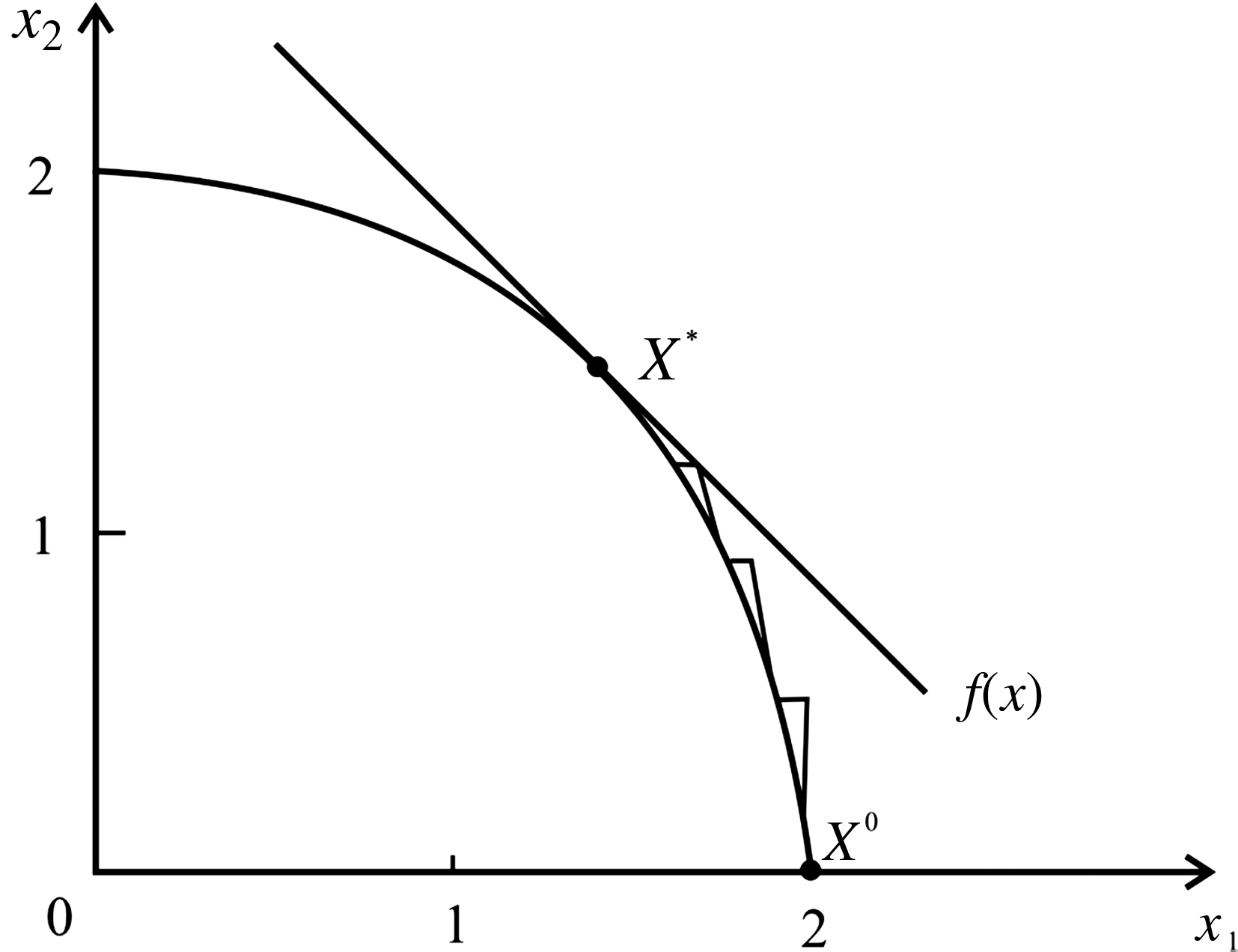
As shown in Fig. 1, the feasible region is an arc. If the initial point is X0 = (2 0), then it needs to move through the arc \documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$$- x_1^2 - x_2^2 - x_2^2 + 4 = 0$$\end{document}. Finally, this point converges at the optimal point \documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$$X^* = (2 / {\sqrt 2} \ \ 2 / {\sqrt 2})$$\end{document}. It moves along the line direction and walks a very short way at first and must pull in the feasible region. In the next step, it forwards the straight line direction and repeats the same pull-in operations. However, this process wastes much computation time, because the convergent rate is too slow. Hence, a new concept of tolerance drawn on Paviani's and Himmeblau's (1972) research is proposed (Paviani and Himmelban, 1969).
Model solution when constraint is curve.
In the beginning of the solving procedure, a tolerance is introduced to every constraint. Within the tolerance range, the constraint is assumed to be satisfied. There are three cases to be considered:
The points that satisfy are as follows:
(1) h(x) = 0, then it is feasible.
(2) \documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$$- {\in} \leq{\rm h} ({\rm x}) \leq \in , \ \in{>}0$$\end{document} is tolerance, it is near feasible.
(3) \documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$${\rm h} ({\rm x}) > \in$$\end{document} or \documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$${\rm h} ({\rm x}) < - \in$$\end{document}, it is infeasible.
Where h(x) is the constraint.
In each step, the tolerance is gradually reduced so that it can finally approach zero when the optimal solution is reached.
Figure 2 shows the geometry description of the concept of tolerance. When the problem has more than one constraint, as shown by Equation (2), all constraints can be combined for discussing their overall tolerance, which is presented as follows:
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}\begin{align*}
{\rm min.} f(x) \\ s.t. \ g_i (x) \ge 0, \ i = 1, 2, \ldots.I \\
h_j(x) = 0, \ j = 1,2, \ldots.J \tag{2}
\end{align*}\end{document}
Geometry description of the tolerance concept.
Suppose that Ui is a Heaviside operator,
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}\begin{align*}
U_{i} = \begin{cases}0 , \quad if \quad g_i (x) \geq 0 \\ 1 ,
\quad if \quad g_i (x) < 0\end{cases} \tag{3}
\end{align*}\end{document}
T(x), which is always positive, is defined as the following:
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}\begin{align*}
{\rm T} ({\rm X}) = \sum_{i = 1}^I U_i g_i^2 (x) + \sum_{j = 1}^J
h_j^2 (x) \tag{4}
\end{align*}\end{document}
to mean that all constraints should be satisfied. When T(X) = 0, all constraints are satisfied, and X is a feasible solution. When \documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$$0 \leq {\rm T} ({\rm X}) \ {\leq} \in$$\end{document}, X is a near feasible; when \documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$${\rm T} ({\rm X}) > \in$$\end{document}, X is an infeasible so that it should move toward the feasible region.
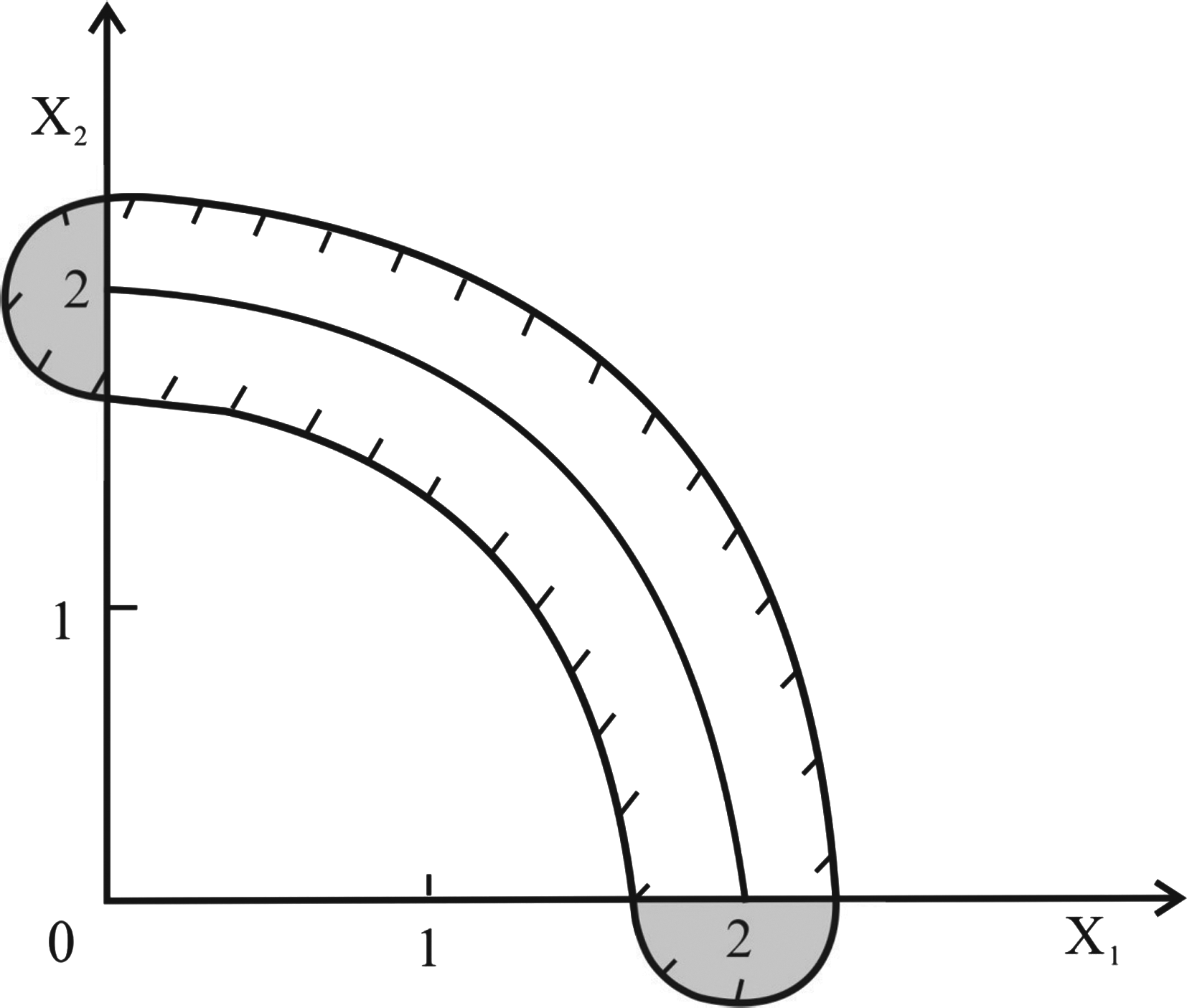
When the problem is presented in the form of equation (1) with \documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$$\in = 1 / 3$$\end{document}, Fig. 3 represents near feasible region. The two semicircles are the tolerance for x1 ≥ 0 and x2 ≥ 0, respectively.
The quasi-feasible region obtained by combining all constraints.
Hestenes' method of multipliers
One of the methods to solve the NLP is the use of a combined technique. The objective function and constraints are combined by using some special algorithm to become an unconstrained NLP. The solution remains the same as for the original problem, whereas the unconstrained NLP makes it much easier than constrained NLP for obtaining the solution. Hence, this method of functional conversion is favored by most researchers who have continually proposed new methods to convert functions. Among the numerous conversion functions such as interior penalty value, exterior penalty value, and method of multipliers, the multipliers method is considered the best (Hwang, 1993; Martinez, 2003).
R: penalty value, a constant during the process of solving the problem.
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}\begin{align*}
\begin{cases} \lambda_{n + 1 , j} = \lambda_{n , j} + 2 Rh_i (x) \\ \mu_{n + 1 , j} = \mu_{n , 1} - 2 R {\overline {g_j}} (x) \end{cases} \tag{9}
\end{align*}\end{document}
The difference between two functions (F) in two consecutive stages should be equal to or greater than zero, or
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}\begin{align*}
F (X , \lambda_{n + 1} , \mu_{n + 1} , R) - F (X , \lambda_n ,
\mu_n , R) \geq 0 \tag{10}
\end{align*}\end{document}
This is the basis of the convergence for the multipliers method. Based on the research conducted by (Reklaitis et al., 1983), Equation (2) can be transformed as follows:
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}\begin{align*}
F (X , \sigma , \tau , R) = f (x) + R \sum_{i = 1}^I \left[< g_i
(x) + \sigma_i >^2 - \sigma_i{^2} \right] \\ \quad \quad\ \ + R
\sum_{j = 1}^J \left[(h_j (x) + \tau_j)^2 \ {-} \tau_j{^2} \right]
\tag{11}
\end{align*}\end{document}
where
< >: means that if the value inside the < > is greater than zero, then < > = 0; if it is smaller than zero (e.g., a), then < > = a (a < 0).
The minimum value for Equation (11) can be found in every step. Meanwhile, the values of σ & τ can be modified based on Equation (12).
When σn+1 = σn, τn+1 = τn, then the convergence is in the optimal solution.
If ∇F(Xn, σn, τn, R) = 0, and σn+1 = σn, τn+1, = τn, then Xn is the Kuhn-Tucker stationary point for Equation (2).
The Hessian matrix included in Equation (11) is expressed as follows:
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}\begin{align*}
\nabla^2 F (X) = \nabla^2 f (x) + 2R \sum [< g_i (x) + \sigma_i >
\nabla^2 g_i (x) + \nabla^2 g_i^2 (x)] \\ + 2R \sum [(h_j (x) +
\tau_j) \nabla^2 h_j (x) + \nabla h_j^2 (x)] \tag{13}
\end{align*}\end{document}
If gi (x) & hj(x) are linear constraints, then Equation (13) can be simplified to
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}\begin{align*}
\nabla^2 F (X) = \nabla^2 f (x) + 2R \sum_{i = 1}^I \nabla g_i^2
(x) + 2R \sum_{j = 1}^J \nabla h_j^2 (x) \tag{14}
\end{align*}\end{document}
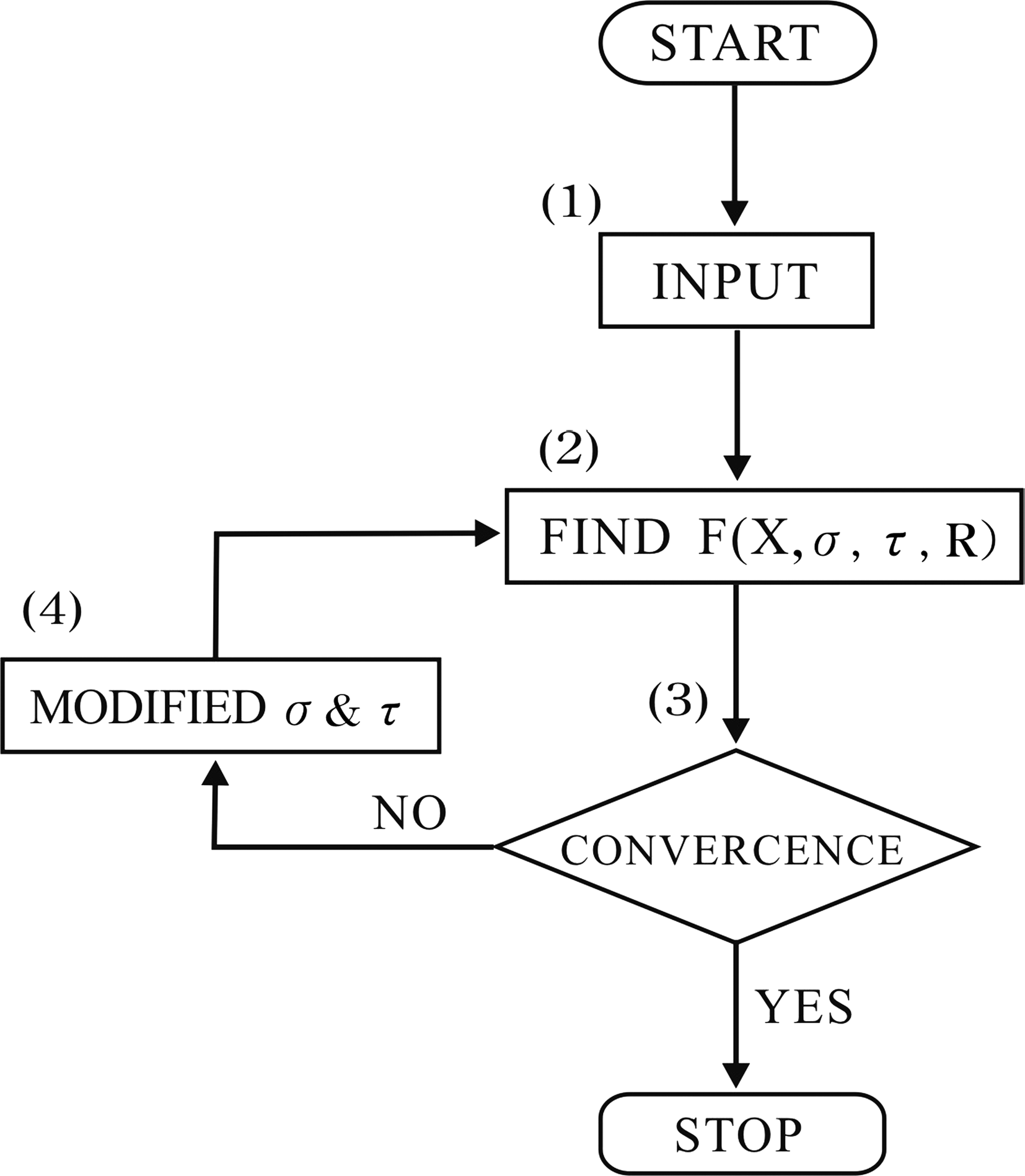
∇2 F(X) is independent of either σ or τ. So, the convergence will not be influenced by the shape of function F (Madani et al., 2007). In Fig. 4 below, a flow chart of the multipliers method with tolerance concept is shown:
Flowchart of the multiplier method with tolerance concept.
Case Study
In Fig. 5 shown below, we present a scheme of the water treatment facilities.
Flowchart of the existing water treatment facilities in Taiwan.
where
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$${\overline {\rm w}}_{\rm j}$$\end{document}: Vector of water quality parameters into unit “J”
1: Prechlorination
2: Alum feeders
3: Rapid mixing basin
4: Flocculation basin
5: Tube-settler sedimentation
6: Modified-greenleaf type filter
7: Postchlorination
Variables for various unit operations or processes are shown as follows:
X1: Feedrate of prechlorination (kgs/h)
X2: Feedrate Fee rate of alum feeder (kgs/h)
X3: Volume of the rapid mixing basin (M3)
X4: Volume of the flocculation basin (M3)
X5: Surface area of the tube-settler sedimentation (M2)
X6: Surface area of the modified-greenleaf filter (M2)
The derivation of structural constraints are considered as parameters representing input water quality, output water quality, treatment efficiency, detention time, operating limit, and treatment characteristics.
min(A1): The minimum value of raw water total alkalinity obtained from past records.
min(C1): Minimum value of raw water free carbon dioxide obtained from past records.
Q: Design flow rate (CMD)
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$$F_{A1}^{- 1} (\alpha) = \max \{A_1 |\ F_{A1} (a) \leq \alpha \} $$\end{document}, the solution for a in the equation
FA1(a) = α, or the inverse of the marginal cumulative distribution function of input total alkalinity (mg/l)
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$$F_{c1}^{- 1} (\alpha) = \hbox {the solution for C in the equation} \ {\rm F_{C1} (C)} = 1 - \alpha$$\end{document}
α: probability that can take value between zero and one.
1−α: complementary probability of α.
Equation (16) is formally identical to Equation (16-1) (i.e., its deterministic equivalent) except that the former includes the random nature of total alkalinity and the free carbon dioxide.
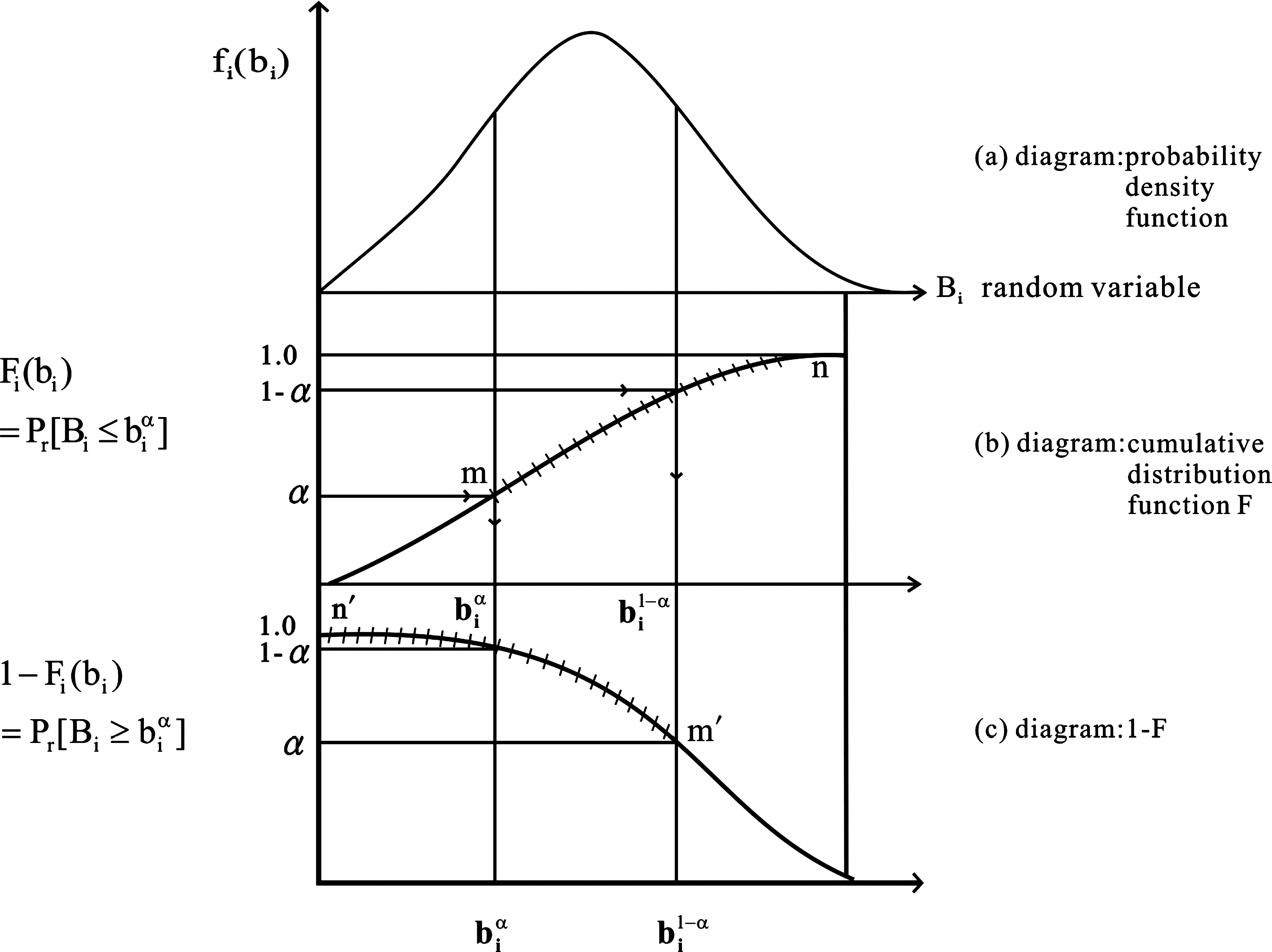
Equations (16) to (23) reveal that the stochastic characteristic has been included in each constraint so that the inverse of the marginal cumulative distribution function of input water quality parameters needs to be solved. Under such circumstances, the stochastic constraints can be transferred to certainty forms. The relationship between probability and \documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$${\rm b}_{\rm i}^{\alpha}$$\end{document} is shown in Fig. 6. If \documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$${\rm Pr} [g_{i (x)} \leq B_i] \geq \alpha , \ and \ \alpha = 0.15 , b_i^{\alpha} = 100 , b_i^{1 - \alpha} = 180$$\end{document} diagram (b) can be used to convert the constrain, which contains probability the constraint, into deterministic equivalent. Since pr[.] is greater than 0.15, the answer is in the curve interval (mn), and the corresponding \documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$${\rm b}_{\rm i}^{\alpha}$$\end{document} is equal to 100; the solution is gi(x) ≥ 100, which is inconsistent with the original problem statement that gi (x) ≤ Bi. Hence, diagram (c) is used to justify the conversion procedure. Since pr[.] ≥ 0.15, the answer is on the curve (m′n′); the corresponding \documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$${\rm b}_{\rm i}^{1 - \alpha}$$\end{document} equals to 180; so that the solution is gi (x) ≤ 180. This coincides with the original problem statement gi (x) ≤ Bi.
Cumulative density function transformation concept.
Using diagram (b) in Fig. 6, if the decision maker, let α = 0.25 or 1 − α = 75%, and Q = 75000CMD, then Eq. (30) can be easily obtained:
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}\begin{align*}
35 + \frac {19200} {75000} X_1 + \frac {9480} {75000} X_2 \leq
48.5 \tag{30}
\end{align*}\end{document}
The corrosion control relationship is presented as follows when α < 0.6:
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}\begin{align*}
0.215 \ X_1 + 0.071 \ X_2 + 0.215 \ X_7 \leq - 0.54 \
(inconsistent) \tag{31}
\end{align*}\end{document}
If α value is enlarged to 1.0 (α = 1.0), Eq. (32) can be obtained:
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}\begin{align*}
\begin{split}0.215 \ X_1 + 0.071 \ X_2 + 0.215 \ X_7 \leq 4.14 \\\quad (\hbox{consistent but unreasonable})\end{split} \tag{32}
\end{align*}\end{document}
The effluent water quality of the selected existing plant should be corrosive in some aspects. If this constraint is not neglected in the structural constraints, a feasible solution for this model is not available so that the sensitivity analysis is necessary to make the conclusion significant and meaningful.
The following equations are established using α = 0.25:
For the alum dosage for coagulation:
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}\begin{align*}
X_2 > 109.4 \tag{33}
\end{align*}\end{document}
For the effluent turbidity:
\documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}\begin{align*}
0.213 X_3 + X_4 + 0.126 X_5 + 7500 X_6 \geq 1847491 \tag{34}
\end{align*}\end{document}
The software developed by (Kao et al., 2005) was tested and modified to assure that it is appropriate to be used in this research. The data input is done using two methods:
(1) Data such as N1(number of variables), NEQ (number of constraints containing “ = ”), NGE (number of constraints containing “<” or “>”), R(penalty value), and Xo (coordinates of the beginning and ending points) are input using the READ command.
(2) The objective function and constraints are input using the “SUB ROUTINE” function; the objective function is designated as SUBROUTINE FUN, whereas the constraints are designated as SUBROUTINE CON.
(3) Initial values are “0” for σ0 and τ0 so that \documentclass{aastex}\usepackage{amsbsy}\usepackage{amsfonts}\usepackage{amssymb}\usepackage{bm}\usepackage{mathrsfs}\usepackage{pifont}\usepackage{stmaryrd}\usepackage{textcomp}\usepackage{portland,xspace}\usepackage{amsmath,amsxtra}\pagestyle{empty}\DeclareMathSizes{10}{9}{7}{6}\begin{document}$$F (X , \sigma_0 , \tau_0 , R)$$\end{document} is made a standard penalty function.
(4) The value of penalty value R is input intuitively using values of 1, 10, 102, 10−1, 10−2, … , and so on. It is kept a constant during the problem solving process. In the actual scope of solution, the probability value α varies from 0.1 to 0.4 with intervals of 0.05.
Result analysis
Two methods based on the concept of tolerance, that is, the method of feasible directions and the multipliers method, have been developed in this research; they are solved using computer software. Due to the limited length of this article, only the multipliers method that leads to better results is presented in this article for demonstrating the theory and application of the flexible tolerance.
The quadratic regression cost function is used to obtain nonlinear objective function. The above computer program is applied to execute the calculation based on 10% of interest rate, 0.11017 of capital recovery factor, and 25 years of design life for the water treatment plant; the results show that when α value is less than 0.25 (α < 0.25), the mode has no solution; the optimal solution can be obtained only when α equals to 0.25. This finding indicates that the actual operation of the water treatment plant is subject to 25% risk or 75% reliability. Compared with the 50% reliability for water treatment plant designed using the traditional approach, the results obtained using the method proposed in this research is much better.
Table 1 lists the original design values and those obtained in this research. The solution of the proposed model is considered “exact solution.” The observation that the proposed model has significant solutions only when α value exceeds 0.25 is significant. It indicates that the lack of appropriate equipment for adding alkaline chemicals in the existing water treatment plant causes corrosive, treated effluent. In the flowchart shown in Fig. 5, if a new unit operation, that is, Unit #2′, is added between Unit #2 and Unit #3, a new variable, that is, X2′, will be included in the model to indicate the lime dosage in kgs/h. As shown in Fig. 7, the modifications lead to optimal solution. As shown in Table 2, the modified model can be solved even if the α value equals to 0.01, thus indicating that the reliability is raised to 99.9%.
Adding unit#2′ to the original treatment flowchart.
Final Solution Obtained After Original Water Treatment Is Modified
Decision Variables
X1
X2
X2′
X3
X4
X5
X6
X7
Design Variables
Prechlorination dosage (kg/h)
Alum dosage (kg/h)
Lime Dosage (kg/h)
Rapid mixing tank volume (M3)
Flocculation Tank volume (M3)
Clairifer surface area (M2)
Rapid filter area (M2)
Postchlorination dosage (kg/h)
Probability (α)
0.01
31.25
172.8
91.26
104
3125
1800
844.5
5
0.02
31.25
169.18
89.50
104
3125
1800
844.5
5
0.05
31.25
160.3
84.73
104
3125
1800
844.5
5
0.10
31.25
147.12
78.07
104
3125
1800
844.5
5
The sensitivity analysis is usually conducted by varying the price coefficient (ci), constants (bi), and coefficient constant (aij) used in a model and changing the constraints and decision variables. Although not discussed in this article due to limited article length, the sensitivity analysis is more significant in effluent turbidity, corrosion control, and fecal coliform removal.
Conclusion
A chance-constrained stochastic model for the design and operation of water treatment facilities is developed in this research for evaluating existing water treatment plant design criteria and operation. The optimization techniques used in the model can be used to search for optimal solution. Since the developed model is used to deal with NLP problems, a concept of flexible tolerance combined with multipliers method is proposed for solving NLP problems by allowing a tolerance for each constraint. In the process of calculations, the tolerance is reduced gradually and finally approaches zero when the optimal solution is reached. The major advantage is the elimination of pull-in operations so that the process is efficient and cost effective.
The probability of violating a constraint denoted by α is related to the input water quality. For this work, when this probability exceeds 0.25, then the optimal solutions are found. The output water quality has only 75% of operating reliability even if the corrosion is neglected. If the flowchart is modified by adding a lime feeder between the alum feeder and rapid mixing basin, the α -value will be reduced to 0.01 to increase the operating reliability to 99.9%. A water quality problem may exist because of the use of prechlorination process and high chlorine dosages, which leads to the formation of THMs from organic precursors. Thus, future design of treatment process or technique should consider implementing source control of organic precursors, changing the point of chlorination, or replacing prechlorination by other processes such as oxidation, aeration, adsorption, resin, and clarification.
This study has shown that the input water quality varies significantly with time; the great variation of the input water quality causes uncertainty. The stochastic approach will express uncertain information expressed as discrete intervals so that probability density functions can be effectively reflected.
All constraints in the model developed are linear mainly because the water treatment plant uses relatively simple operations and processes. However, the NLP model developed in this research is applicable for other environmental systems that have nonlinear constraints.
Results of this research will definitely bring new concept and direction for design of water treatment plants in Taiwan. When facing the problems of changing water quality and quantity caused by global warming and extreme weather, the policy maker may use the model developed in this research to reduce future risks for operating water treatment plants.
Footnotes
Acknowledgments
The authors would like to express their gratitude to Dr. Chiang Kao, who offered the computer programming help, and for his helpful comments and suggestions on the draft. The authors also deeply appreciate the anonymous reviewers for their insight, comments, and suggestions.
Author Disclosure Statement
No competing financial interests exist.
References
1.
BettJ.T.1975. An improved penalty function method for solving constrained parameter optimization problems. JOTA, 16:1.
2.
CaiY., HuangG.H.2007. Municipal solid waste management under uncertainty: a mixed interval parameter fuzzy-stochastic robust programming approach. Environ. Eng. Sci., 24:358.
3.
ChangN.B., WangS.F.1995. A grey nonlinear programming approach for planning coastal wastewater treatment and disposal system. Water Sci. Tech., 32:19.
4.
DykstraD.P.1984. Mathematical Programming for Natural Resource Management. New York: McGraw-Hill.
5.
FletcherR.1981. Practical Methods of Optimization, Vol. 2, Constrained Optimization. New York: John Willey & Sons.
6.
FuC., PochM.1998. Fuzzy model and decision of COD Control for an activated sludge process. Fuzzy Sets Syst., 93:281.
7.
HimmeblauD.M.1972. Applied Nonlinear Programming. New York: McGraw-Hill.
8.
HwangF.A.1993. Using the penalty function method to solve the NLP; master thesis of National Cheng-Kung University. Department of Mathematics Science: Taiwan, R.O.C.
9.
KaoC., ChenS.P.2006. A Stochastic Quasi-Newton method for simulation response optimization. Eur. J. Oper. Res., 173:30.
10.
KaoC., ChiouS.T., WuE.M.2005. Some flexible tolerance methods for solving NLP. Research Report of National Cheng-Kung University: Taiwan, R.O.C.
11.
KaoC., WuM.Y.2008. Measuring the National Competitiveness of Southeast Asian Countries. Eur. J. Oper. Res., 187:613.
12.
LiK.C., WuM,Y.1988. Application of stochastic NLP model on the optimal design of the water treatment facilities. J. Water Supply, 6:137.
13.
MartinezJ.M., SvaiterB.F.2003. A practical optimality condition without constraint qualifications for nonlinear programming. J. Optimization Theory Appl., 118:117.
14.
ObroptaC.C., KardosJ.S.2007. Review of urban storm water quality model: deterministic, stochastic, and hybrid approach. J. Am. Water Resour. Assoc., 43:1508.
15.
PavianiD., HimmelbanD.M.1969. Constrained nonlinear optimization by heuristic programming. J. Oper. Res., 17:872.
16.
ReklaitisG.A., RavindranA., RagsdellK.M.1983. Engineering Optimization. New York: John Wiley & Sons.
17.
SteyerJ., RollandD., BouvierJ., MolettaR.1997. Hybrid fuzzy neural network for diagnosis-application to the anaerobic treatment of wine distillery wastewater in a fluidised bed reactor. Water Sci. Technol., 36:209.
18.
Taiwan Water Co.2009. Design criteria–2009 yearly report: Taichung, Taiwan.
19.
TayJ., ZhangX.1999. Neural fuzzy modelling of anaerobic biological wastewater treatment systems. J. Environ. Eng., 125:1149.
20.
TayJ., ZhangX.2000. A fast predicting neural fuzzy model for high-rate anaerobic wastewater treatment systems. Water Res., 34:2849.
21.
VojinovicE., KecmanV, BabovicV.2003. Hybrid approach for modeling wet weather response in wastewater systems. J. Water Res. Plann. Manag., 129:511.
22.
WuC.C., ChangN.B.2004. Corporate optimal production planning with varying environmental costs: a grey compromise programming approach. Eur. J. Oper. Res., 155:68.
23.
WuE.M., ChuW.S.1991. System analysis of water treatment plant in Taiwan. J. Water Resour. Plann. Manag., 117:536.
24.
XuY., HuangG.H., QinX.2009. Inexact two-stage stochastic robust optimization model for water resources management under uncertainty. Environ. Eng. Sci., 26:1765.
25.
YenJ., WandL., GillespieC.W.1997. Improving the interpretability of TSK fuzzy models by combining global learning and local learning. IEEE Trans. Fuzzy Syst., 6:530.