In this article, alternative randomized response models are proposed, which make use of sum of quantitative scores generated from two decks of cards being used in a survey. The proposed methods are compared to the Odumade and Singh and Singh and Grewal models through a simulation study. It is shown that the modified methods can be used more efficiently than those both models.
In this article, we first discuss the efficient use of two decks of cards introduced by Odumade and Singh (2009). They showed that a randomized response model based on two decks can easily be adjusted to be more efficient than the Warner (1965), Mangat and Singh (1990), and Mangat (1994) methods by selecting appropriate parameters for their randomization device. The collection of data through personal interview surveys on sensitive issues such as induced abortions, drug abuse, and family income is a serious issue; see, for example, Fox and Tracy (1986), Kerkvliet (1994), Chaudhuri (2011), Chaudhuri and Christofides (2013), Su, Sedory, and Singh (2015), and Fox (2016). Warner (1965) considered the case where the respondents in a population can be divided into two mutually exclusive groups: one group with stigmatizing/sensitive characteristic A and the other group without it. For estimating π, the proportion of respondents in a population belonging to the sensitive group A, a simple random sampling with replacement (SRSWR) sample s of n respondents is selected, from the population. For collecting information on a sensitive characteristic, Warner (1965) made use of a randomization device. One such device could be a deck of cards with each card having one of the following two mutually exclusive statements:
(i) “I belong to group A” and (ii) “I do not belong to group A”
The statements (i) and (ii) occur with relative frequencies P0 and (1 − P0), respectively, in the deck. Each respondent in the sample s is asked to select a card at random from the well-shuffled deck. Without showing the card to the interviewer, the interviewee answers the question, “Is the statement true for you?” Then the number of people n1 that answer “yes” is binomially distributed with parameters and n. For large sample size n (see Lee, Sedory, and Singh 2013), the maximum likelihood estimator of π exists for and is given by:
The estimator is an unbiased estimator for π, and the variance of the estimator is given by:
Mangat and Singh (1990) suggested a two-stage randomized response model. In the first stage, each respondent is requested to use a randomization device, , such as a deck of cards with each card bearing one of the following two mutually exclusive statements:
(i) “I belong to group A” and (ii) “Go to the randomization device .”
The statements (i) and (ii) occur with relative frequencies T0 and (1 − T0), respectively, in the first randomization device, . In the second stage, if directed by the outcome of , the respondent is requested to use the second randomization device, , which is the same as the Warner (1965) device. Under the two-stage randomized response model, an unbiased estimator of the population proportion π is given by:
with variance:
Mangat (1994) considered another randomized response model where each respondent selected in the sample s is requested to report “yes” if he or she belongs to the sensitive group A, otherwise he or she is instructed to use the Warner (1965) device. For this model, an unbiased estimator of the population proportion π is given by:
Kuk (1990) proposed a randomized response model that makes use of two randomization devices. The first randomization device, R1 (say) has two possible outcomes, say a deck of cards each card bearing one of two possible questions: (i.) “Are you a member of group A?” and (ii) “Are you a member of group Ac?” with known probabilities θ1 and (1 − θ1), respectively. The second randomization device, R2 (say), has the same two possible outcomes, say a deck of cards, each card bearing one of two possible questions: (i) “Are you a member of group Ac?” and (ii) “Are you a member of group A?” with known probabilities θ2 and (1 − θ2), respectively. Assume that an SRSWR sample of n respondents is selected from the population of interest. Each respondent selected in the sample is provided with both randomization devices, R1 and R2, along with instructions on how to make of use of these devices. Each respondent is also given the instruction that, if he or she belongs to the sensitive group A, then he or she should make use of the first randomization device R1, while if he or she belongs to the nonsensitive group Ac, then he or she should make use of the second randomization device R2, without disclosing to which group, A or Ac, he or she belongs. That is, the choice between the two randomization devices R1 and R2 is being made by the interviewee unobserved by the interviewer. Hence, the privacy of the respondent is maintained.
The true probability of a yes answer θK is given by:
and the maximum likelihood and unbiased estimator of π is given by:
The variance of the estimator is given by:
Note that if θ2 = (1 − θ1), then the Kuk’s randomized response model reduces to the Warner (1965) model. If θ1 = 1 and θ2 = (1 − P), then the Kuk’s model reduces to the Mangat (1994) model, and so on. Recently, Singh and Grewal (2013) proposed a randomized response model in which each respondent selected in the sample s is provided with two decks of cards in the same way as in the Kuk (1990) model. In the first deck of cards, let be the proportion of cards with the statement, “I belong to group A” and be the proportion of cards with the statement, “I do not belong to group A.” In the second deck of cards, let be the proportion of cards with the statement, “I do not belong to group A” and be the proportion of cards with the statement, “I belong to group A.” Up to here, it is same as the Kuk (1990) randomized response device. Now in the proposed model, if a respondent belongs to group A, he or she is instructed to draw cards, one by one with replacement, from the first deck of cards until he or she gets the first card bearing the statement of his or her own status, and is then requested to report the total number of cards, say X, drawn. If a respondent belongs to group Ac, he or she is instructed to draw cards, one by one using with replacement, from the second deck of cards until he or she gets the first card bearing the statement of his or her own status, and is then requested to report the total number of cards, say Y, drawn. Obviously, and , that is, X and Y follow geometric distributions with parameters and , respectively, because cards are drawn based on with replacement sampling. Let Zi be the number of cards reported by the ith respondent, then Singh and Grewal (2013) proposed an unbiased estimator of the population proportion π given by:
In Odumade and Singh (2009) model, each respondent in an SRSWR sample of n is provided with two decks of cards marked as Deck I and Deck II as shown in Figure 1.
Two decks of cards.
Each respondent is requested to draw two cards simultaneously, one card from each deck of cards, and read the statements in order. The respondent first matches his or her status with the statement written on the first deck of cards and then he or she matches his or her status with the statement written on the second deck of cards. Let π be the true proportion of respondents in the population that possesses the characteristic A.
Consider a situation that the selected respondent belongs to group A: Now, if he or she draws first card with statement “” (with probability P) from the first deck and a second card with statement “” (with probability T) from the second deck, then he or she would report: (Yes, Yes).
Consider another situation where the selected respondent belongs to group Ac: Now if he or she draws first card with statement “” (with probability (1 − P)) from the first deck and second card with statement “” (with probability (1 − T)) from the second deck, then he or she would also report: (Yes, Yes). Thus, the response (Yes, Yes) can come from both types of respondents, these belonging either to group A or to Ac, and hence their privacy will be maintained. The probability of getting a (Yes, Yes) response is given by:
Now consider a situation where the selected respondent belongs to group A: Now if he or she draws first card with statement “” (with probability P) from the first deck and second card with statement “” (with probability (1 − T)) from the second deck, then he or she would report: (Yes, No).
Again consider another situation where the selected respondent belongs to group Ac: Now if he or she draws first card with statement “” (with probability (1 − P)) from the first deck and second card with statement “” (with probability T) from the second deck, then he or she would also report: (Yes, No). Thus, the response (Yes, No) can come from both types of respondents, those belonging either to the group A or to Ac, and hence their privacy will not be disclosed. The probability of getting (Yes, No) response is given by:
Similarly, there are two ways to obtain each of the responses (No, Yes) and (No, No), one from those belonging to A and the other from those not in A. The corresponding probabilities are given by:
and
Let , , , and be the observed proportions of (Yes, Yes), (Yes, No), (No, Yes), and (No, No) responses. Odumade and Singh (2009) defined the least square distance between the observed proportions and the true proportions as:
Odumade and Singh (2009) decided to choose as estimator, that value of , such that the least squared distance D is minimum. By setting and solving for π, an unbiased estimator of the population proportion π is given by:
The variance of the estimator is given by:
Note that if T = P = P0 (say), the variance of the estimator in equation (17) becomes:
In the present article, let us assume we have two decks of cards as in the Odumade and Singh (2009) model. Further assume that the cards bearing the statement “I belong to group A” are marked red while these bearing the statement “I do not belong to group A” are marked with green (the colors are observed only by the respondent).
In the proceeding sections, we apply an extension of Singh and Grewal (2013) model to the Odumade and Singh (2009) model which leads to three new randomized response models, named as models I, II, and III.
Model I
Respondents are to draw cards at random with replacement from each of the decks and to report, based on whether they belong to group A or not, different things.
Case I
Respondent belongs to sensitive group A: In this case, the respondent is to draw cards from deck I until r1 red cards have appeared; let X1 be the number of cards drawn. They are to draw cards from deck II until r2 red cards appear; let Y1 be the number of cards drawn. Clearly, X1 will be a negative binomial random variable, that is, , while Y1 will be negative binomial, that is, . Finally, they are to report the sum (X1 + Y1).
Case II
Respondent does not belong to group A: In this case, the respondent is to draw cards from deck I until r1 green cards have appeared; let X2 be the number of cards drawn. They are to draw cards from deck II until r2 green cards appear; let Y2 be the number of cards drawn. Here, and . Finally, they are to report the sum (X2 + Y2).
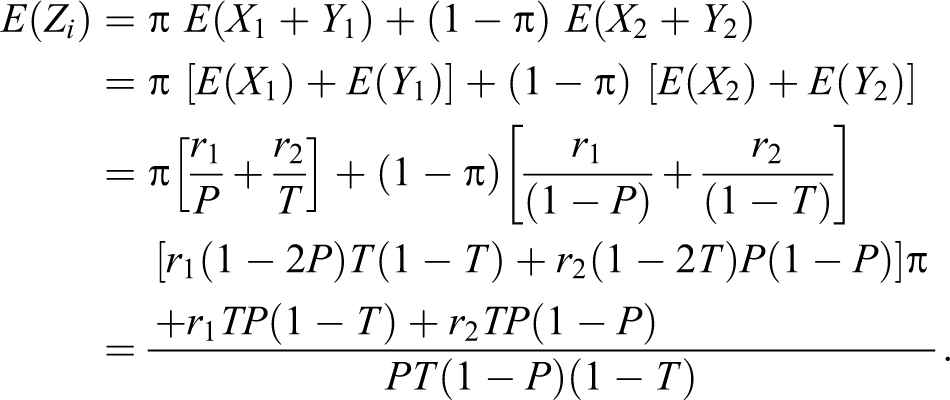
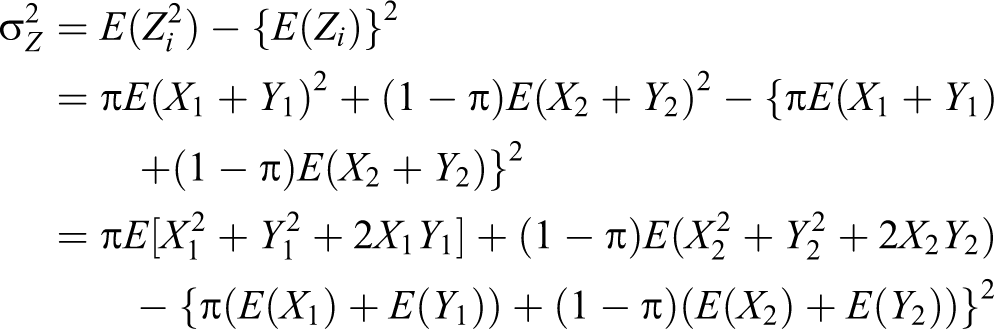
Again let π be the true proportion of the sensitive characteristic in the population who belongs to the group A and be the true proportion of the sensitive characteristic in the population who belong to the nonsensitive group Ac. The distribution of observed responses Zi, from the n respondents in a sample is then given by:
In other words, the observed response Zi takes a values of X1 + Y1 with a probability of π and takes a value of X2 + Y2 with a probability of (1 − π)
Now, we have the following theorems:
Theorem 1. An unbiased estimator of the population proportion π is given by:
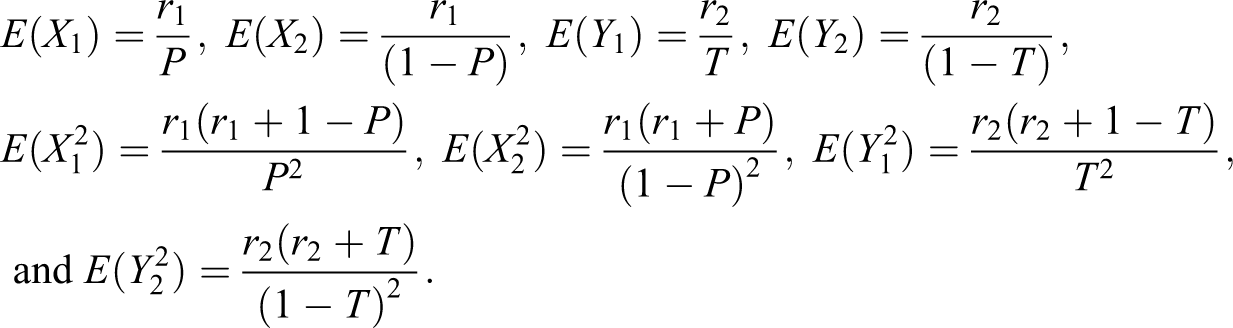
Proof. Given that , , , and , so we have:
Now by the definition of expected value, from equation (19), we have
On solving it for π we have
By the method of moments, we have the theorem.
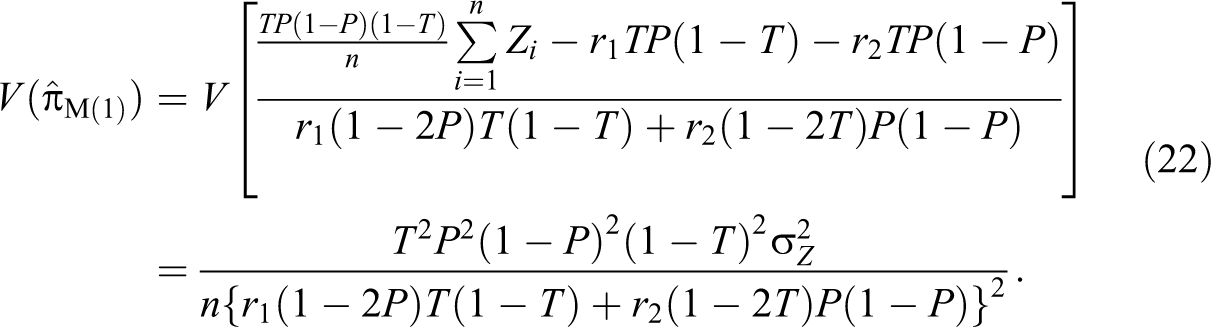
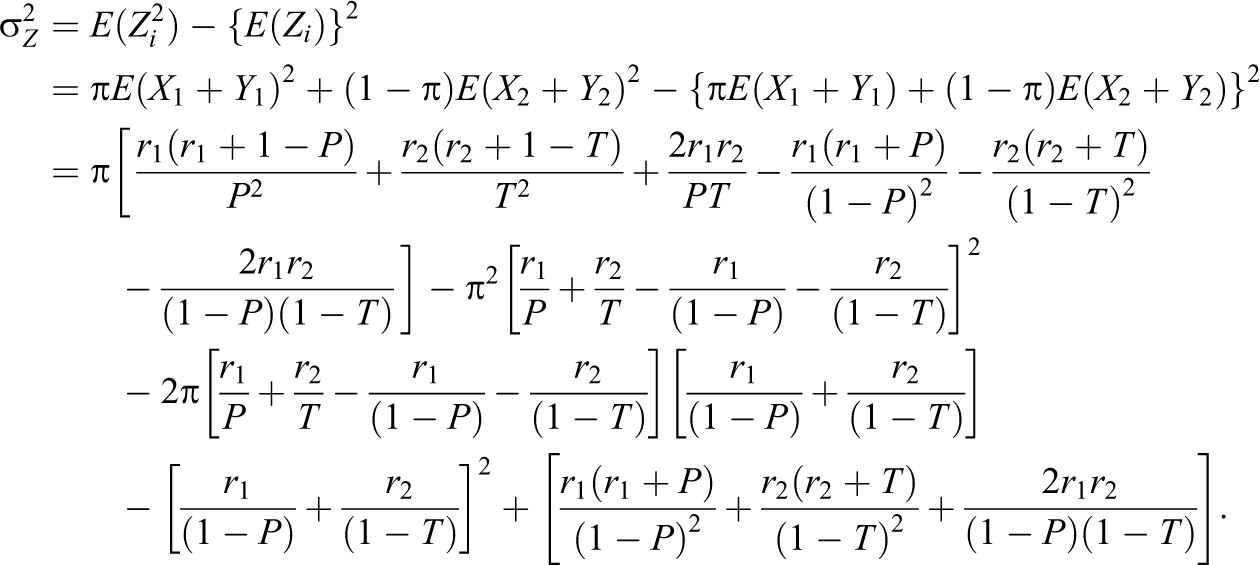
Theorem 2. The variance of the unbiased estimator of the population proportion π is given by:
Proof. Given that , , , and , so we have:
Note that all the responses are independent, so by the definition of variance, we have
Theorem 3. An unbiased estimator of the variance of proposed estimator of the population proportion π is given by:
Proof. Note that
and
So we get
Thus, we have the theorem.
Odumade and Singh (2009) have already shown that their proposed model is more efficient than the Warner (1965), Kuk (1990), and Mangat (1994) models for a practicable choice of randomization device parameters. Also Singh and Grewal (2013) have shown that their proposed model can perform better than Kuk (1990) model for certain choices of randomization device parameters. In the Relative Efficiency of the Model I subsection, along similar lines by means of a small-scale simulation study, we investigate situations where the proposed new alternative randomized response model can perform better than the Odumade and Singh (2009) and the Singh and Grewal (2013) models.
Relative Efficiency of the Model I
We define the percent relative efficiency of the proposed alternative estimator with respect to the Odumade and Singh (2009) estimator as:
We also define the percent relative efficiency of the proposed alternative estimator with respect to the Singh and Grewal (2013) estimator as:
Note that the REI(1) and REI(2) values in equations (25) and (26) are free from the sample size but do depend on the choice of randomization device parameters such as P, T, , , r1, r2, and the value of π. We keep the same choice of P and T in the proposed alternative randomized response model and in the Odumade and Singh (2009) model. In this simulation study, we consider four choices of P and T (0.30, 0.35, 0.65, and 0.70) in the proposed and in the Odumade and Singh (2009) models. We set and in the Singh and Grewal (2013) model. In addition, we vary the values of r1 and r2 as 1, 2, and 3. The values of π are changed between 0.1 and 0.9 with a step of 0.1.
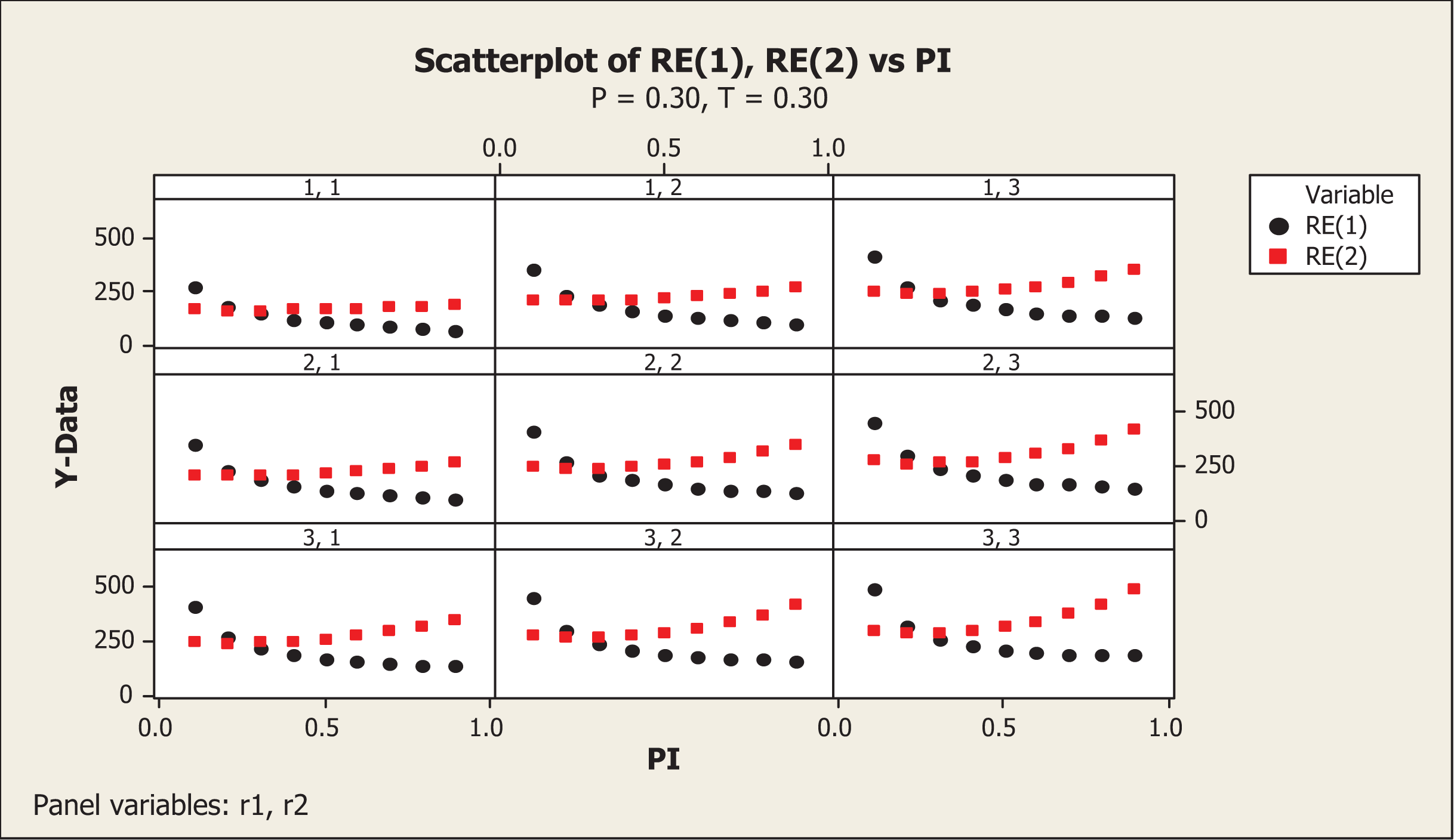
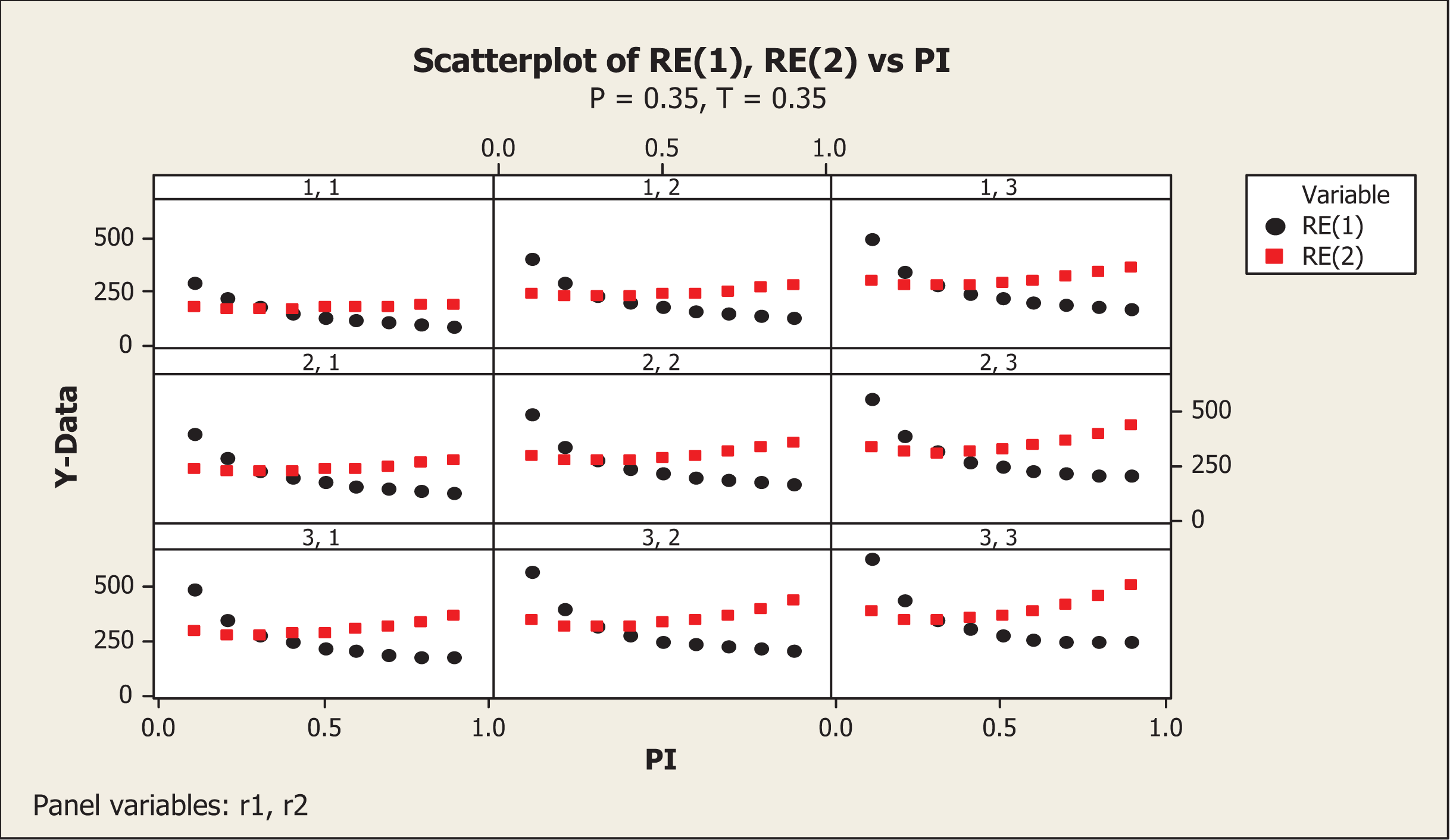
We wrote the FORTRAN codes PRGM1.F95 (see Online Appendix A) to investigate the various situations. In FORTRAN codes, note that and . The results obtained by executing the above FORTRAN codes are presented in Table A1 in Online Appendix A. A pictorial presentation of the results given in Table A1 (see Online Appendix A) for P = T = 0.3 and P = T = 0.35 are, respectively, displayed in Figures 2 and 3.
and values for P = 0.30 and T = 0.30 for different values of .
and values for P = 0.35 and T = 0.35 for different values of π.
For P = 0.3 and T = 0.3, if r1 = r2 = 1 the value of REI(1) reaches a maximum of 273.2 percent at π = 0.1, remains higher than 100 percent up to and then reduces to a minimum of 70.2 percent at π = 0.9. Thus, if the value of π is likely to be close to zero, then the choice of P = 0.3 and T = 0.3 for r1 =r2 = 1 is preferred over the use of the Odumade and Singh (2009) model. The value of REI(2) attains 167.1 percent at π = 0.1, 169.8 percent at π = 0.5, and 191.5 percent at π = 0.9. In other words, the proposed new alternative estimator remains more efficient than the Singh and Grewal (2013) model with and for these choices of parameters in the proposed model. For P = 0.3 and T = 0.3, r1 = 1 and r2 = 2, the REI(1) attains 351.9 percent for π = 0.1, reduces to a minimum value of 101.0 percent at π = 0.9, with a median value of 142.6 percent at π = 0.5. The corresponding values of REI(2) are 215.1 percent, 275.6 percent, and 221.3 percent, respectively. In other words, the proposed model remains more efficient than the both Odumade and Singh (2009) and Singh and Grewal (2013) models under such circumstances. The same results are observed by interchanging r1 = 2 and r2 = 1. If r1 = 1 and r2 = 3, the REI(1) and REI(2) values become 411.0 percent and 251.3 percent for π = 0.1, 168.1 percent and 260.9 percent for π = 0.5, and 129.4 percent and 353.2 percent for π = 0.9. The same results remain by interchanging the values of r1 and r2 when keeping the other parameters the same. If r1 = 2 and r2 = 2, the values of REI(1) and REI(2) are 411.0 percent and 251.3 percent at π = 0.1, 168.1 percent and 260.9 percent at π = 0.5, and 129.4 percent and 353.2 percent, respectively. If r1 = 3 and r2 = 3, the values of REI(1) and REI(2) are 494.1 percent and 302.1 percent at π = 0.1, 204.7 percent and 317.7 percent at π = 0.5, and 180.1 percent and 491.4 percent, respectively. The mirror image of these results, around the value of π = 0.5, is obtained by setting P = 0.7 and T = 0.7. Thus, if π is close to 0, then it is suggested that P and T be chosen less than 0.5 for the proposed model to remain more efficient than the Odumade and Singh (2009) model, while if π is close to 1, it is suggested that P and T be chosen greater than 0.5. The proposed model remains more efficient than the Singh and Grewal (2013) model for all the choices of the parameters considered.
Further note carefully that in the Odumade and Singh (2009) model, each respondent is asked to report a pair of responses as (yes, yes), (yes, no), (no, yes), or (no, no), while in the proposed model a respondent is requested to report only one quantitative response Zi which is the sum of two numbers resulting from two decks of cards. More cooperation is expected, from a respondent asked to report a single result rather than two results.
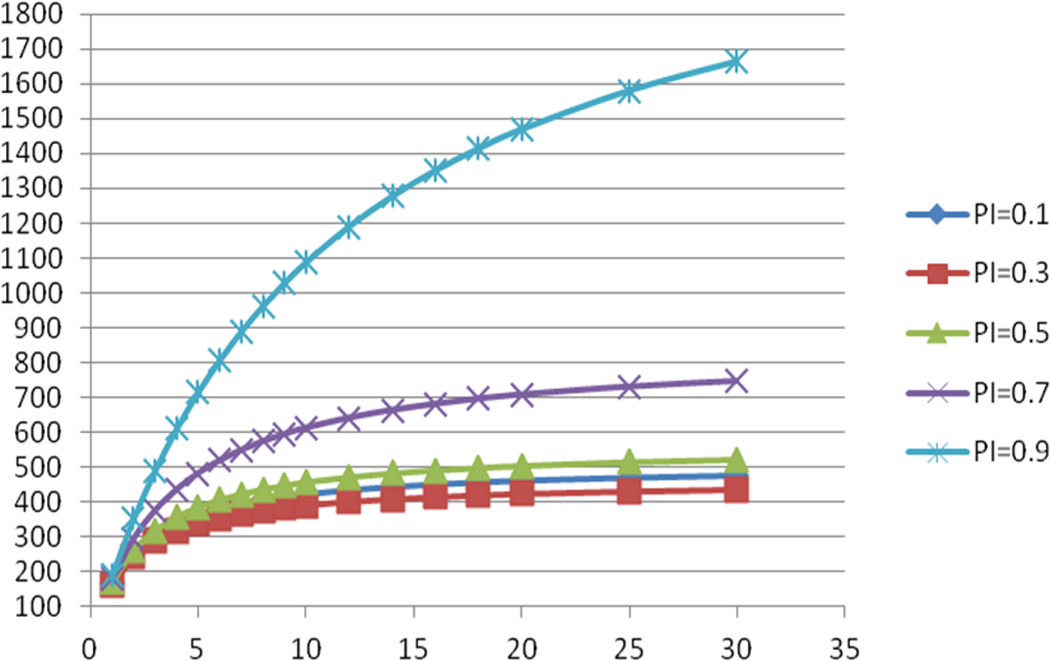
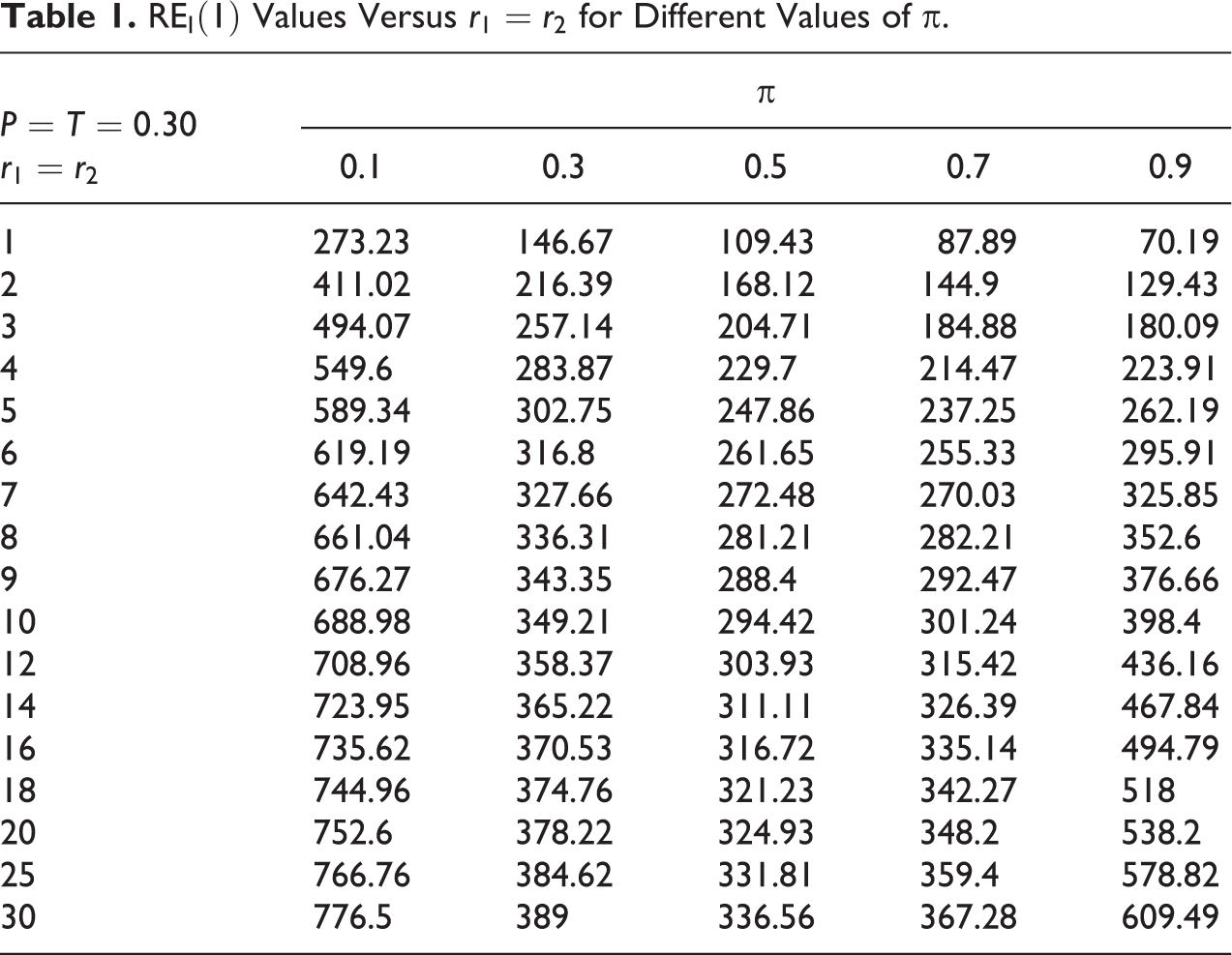
It seems that as the values of r1 and r2 increase, the REI(1) value will go on increasing. From Table 1 and Figure 4 (or Table 2 and Figure 5), it is interesting to note that the value of REI(1) increases sharply at the beginning, but later on it becomes almost constant. Thus, higher values of r1 and r2 may reduce respondents cooperation while increasing the percent relative efficiency REI(1) (or REI(2)) values only marginally. We wrote the FORTRAN codes PRGM2.F95 (see Online Appendix A) to look for the change in values of REI(1) and REI(2) while simultaneously increasing the values of r1 and r2 between 1 and 30 for different values of π between 0.1 and 0.9 with a step of 0.2, for P = T = 0.30. The values of REI(1) so obtained are presented in Table 1.
versus for different values of π = 0.1, 0.3, 0.5, 0.7, and 0.9.
versus for different values of π = 0.1, 0.3, 0.5, 0.7, and 0.9.
Values Versus for Different Values of π.
π
0.1
0.3
0.5
0.7
0.9
1
273.23
146.67
109.43
87.89
70.19
2
411.02
216.39
168.12
144.9
129.43
3
494.07
257.14
204.71
184.88
180.09
4
549.6
283.87
229.7
214.47
223.91
5
589.34
302.75
247.86
237.25
262.19
6
619.19
316.8
261.65
255.33
295.91
7
642.43
327.66
272.48
270.03
325.85
8
661.04
336.31
281.21
282.21
352.6
9
676.27
343.35
288.4
292.47
376.66
10
688.98
349.21
294.42
301.24
398.4
12
708.96
358.37
303.93
315.42
436.16
14
723.95
365.22
311.11
326.39
467.84
16
735.62
370.53
316.72
335.14
494.79
18
744.96
374.76
321.23
342.27
518
20
752.6
378.22
324.93
348.2
538.2
25
766.76
384.62
331.81
359.4
578.82
30
776.5
389
336.56
367.28
609.49
Values for Different Values of π.
π
0.1
0.3
0.5
0.7
0.9
1
167.05
164.44
169.81
178.69
191.53
2
251.29
242.62
260.87
294.62
353.17
3
302.07
288.31
317.65
375.9
491.4
4
336.02
318.28
356.44
436.05
610.97
5
360.32
339.45
384.62
482.37
715.41
6
378.56
355.2
406.02
519.13
807.43
7
392.77
367.38
422.82
549.01
889.12
8
404.15
377.07
436.36
573.79
962.13
9
413.47
384.97
447.51
594.65
1,027.76
10
421.23
391.53
456.85
612.48
1,087.09
12
433.45
401.81
471.62
641.31
1,190.14
14
442.62
409.49
482.76
663.62
1,276.57
16
449.75
415.44
491.47
681.4
1,350.12
18
455.46
420.19
498.46
695.9
1,413.45
20
460.13
424.07
504.2
707.95
1,468.56
25
468.79
431.24
514.87
730.73
1,579.4
30
474.74
436.15
522.24
746.75
1,663.09
A pictorial presentation of results in Table 1 is shown in Figure 4. From Figure 4, it is clear that if the value of is more than 10, then the percentage relative gain is not as steep as for a choice of value of r1 = r2 between 1 and 5 for all possible values of π considered (0.1, 0.3, 0.5, 0.7, and 0.9) and P = T = 0.30.
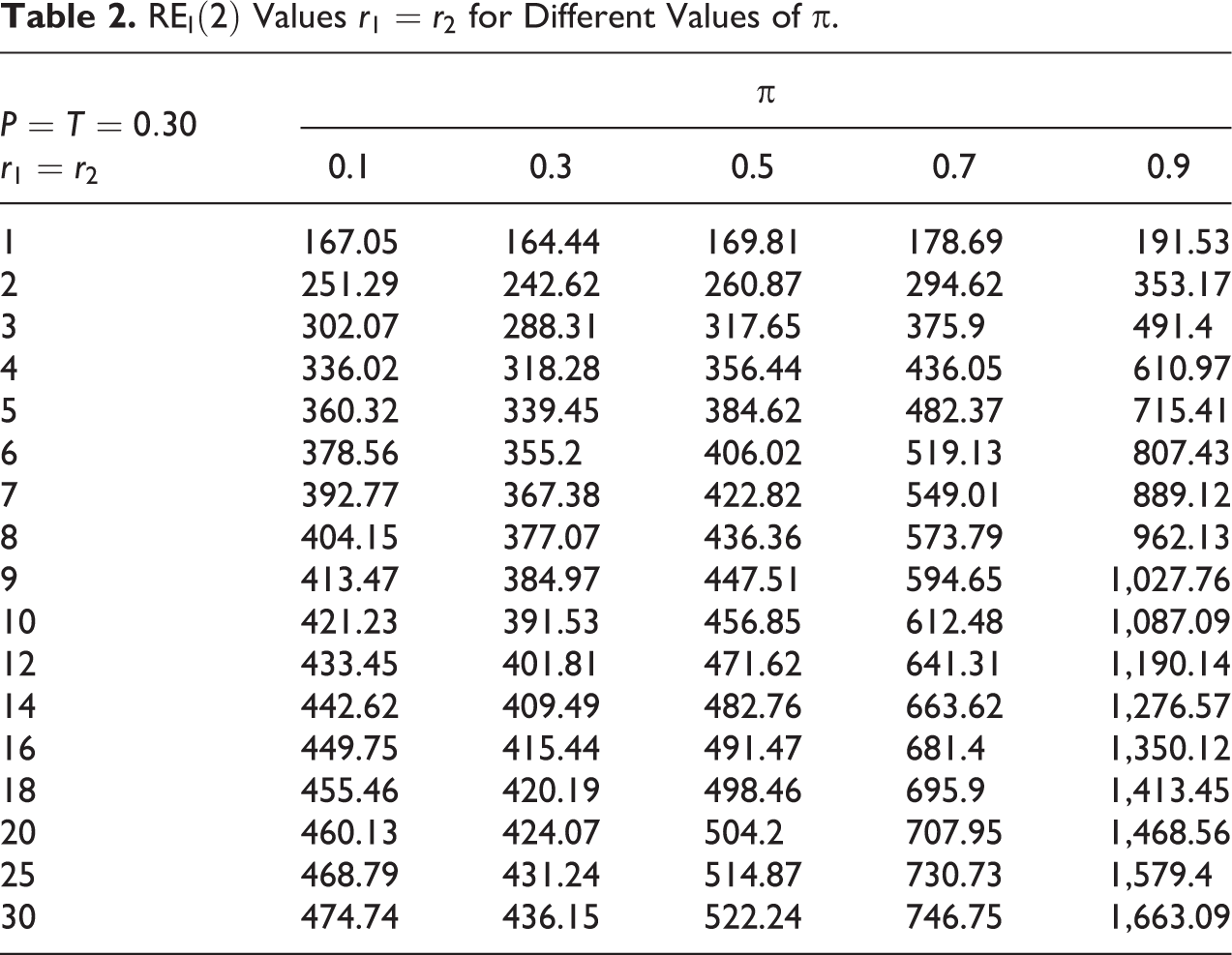
For demonstration purposes, we provide in Table 2 the values of as a function of for different choice of the proportion of sensitive characteristic π in a population for .
A pictorial presentation of results in Table 2 is shown in Figure 5. From Figure 5, it is again clear that if the value of is more than 10, then the percentage relative gain is not as steep as for a choice of value of between 1 and 5, for all possible values of π considered (0.1, 0.3, 0.5, 0.7, and 0.9). Thus, it seems that increasing the values of and will only marginally increase the percent relative efficiency of the proposed estimator.
In the next section, we consider a further extension of the Odumade and Singh (2009) technique based on multiple trials per respondent which leads to a new alternative randomized response model, say model II.
Model II
Using the same decks of cards as before, respondents are asked to draw cards at random with replacement from each of the decks and, based on whether they belong to group A or not, to report different things.
Case I: Respondent belongs to group A. In this case, the respondent is to draw cards from deck I. Let be the number of red cards drawn. They are to draw cards from deck II. Let be the number of red cards drawn. Clearly, and are binomial random variables with and . Finally, they are to report the sum .
Case II: Respondent does not belong to group A. In this case, the respondent is asked to draw cards from deck I. Let be the number of green cards drawn. They are to draw cards from deck II. Let be the number of green cards drawn. Again and are binomial random variables with and . Finally, they are to report the sum .
Let be the true proportion of the sensitive characteristic in the population who belongs to the group A and be the true proportion of the sensitive characteristic in the population who belong to the nonsensitive group Ac. The distribution of observed responses Zi, from the n respondents in a sample is then given by:
In other words, the observed response takes a values of with a probability of π and takes a value of with a probability of
Now, we have the following theorems.
Theorem 4. An unbiased estimator of the population proportion π is given by:
Proof. Given that , , , and , so we have:
Now by the definition of expected value, from (27), we have
On solving it for π, we have
By the method of moments, we have the theorem.
Theorem 5. The variance of the unbiased estimator of the population proportion π is given by:
Proof. Given , , , and ,
so we have:
Note that all the responses are independent, so by the definition of variance, we have
where
We have (31) because:
On using (31) in (30), we have the theorem.
Theorem 6. An unbiased estimator of the variance of the proposed estimator of the population proportion π is given by:
Proof. Note that
and
So we get
which proves the theorem.
In the Relative Efficiency of the Model II subsection, we investigate situations where the proposed fixed multiple trial randomized response model (model II) can perform better than the Odumade and Singh (2009) model.
Relative Efficiency of the Model II
We define the percent relative efficiency of the proposed multi trial alternative estimator with respect to the Odumade and Singh (2009) estimator as:
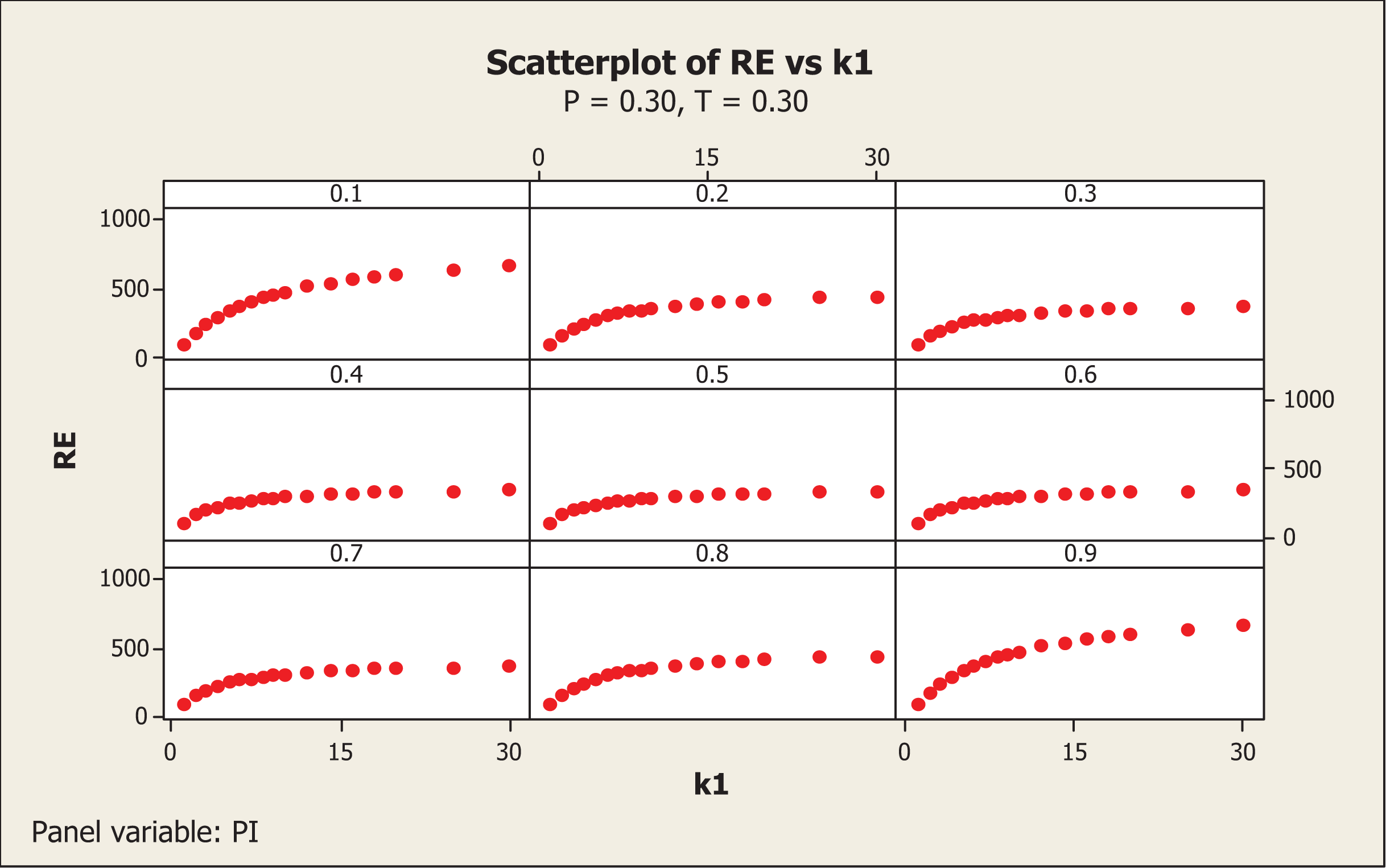
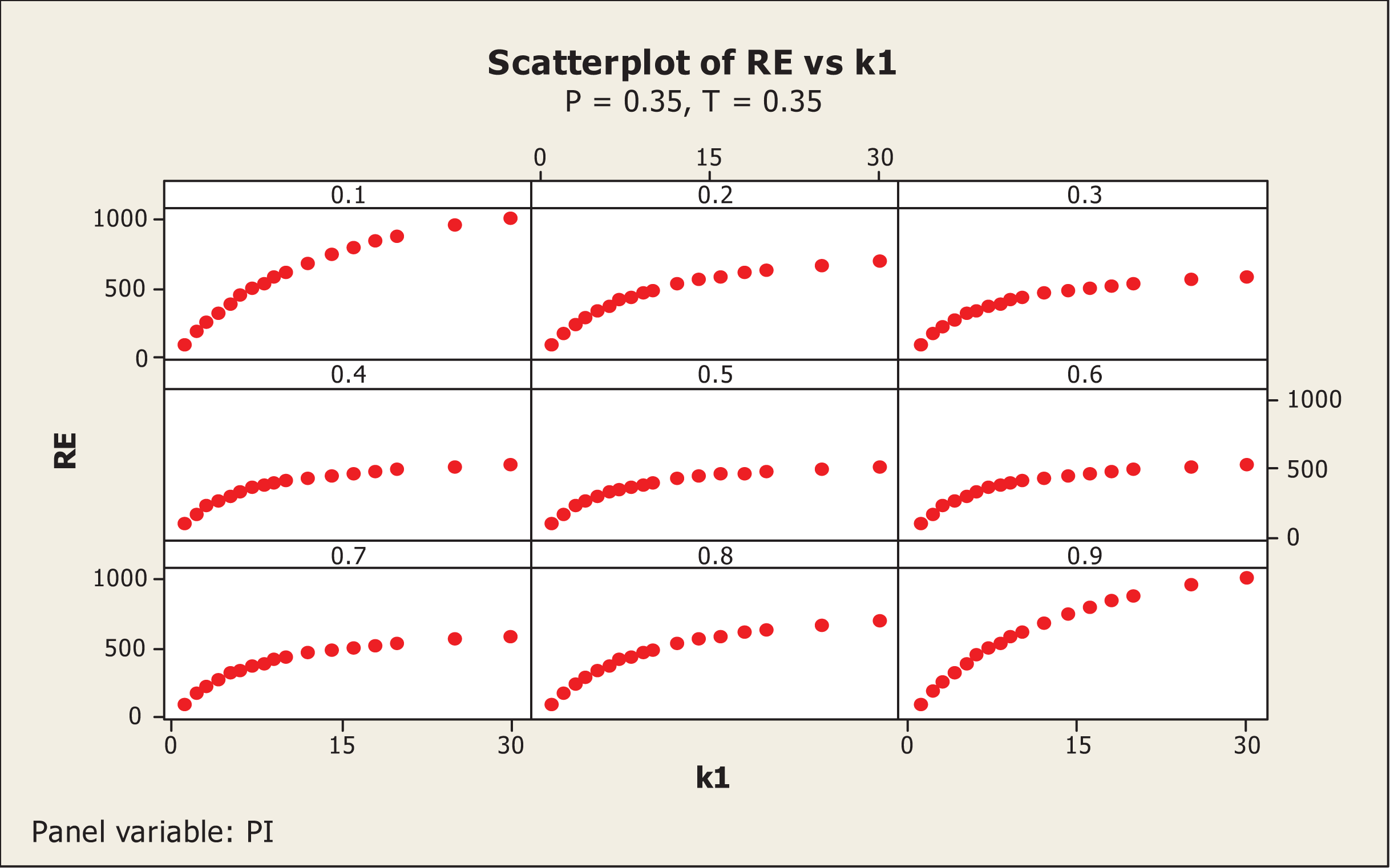
Note that the values are free from the sample size but depend on the choice of randomization device parameters such as P, T, k1, k2, and the value of π. We keep the same choice of P, and T in the proposed multiple trial alternative randomized response model (model II) as in the Odumade and Singh (2009) model. In this simulation study, we consider four choices of P and T as 0.30, 0.35, 0.65, and 0.70 in the proposed multiple trial and the Odumade and Singh (2009) models. We varied the values of k1 and k2 from 1 to 30 to investigate whether the increase in the number of trials per respondent increases the efficiency of the estimator. We kept k1 equal to k2; in addition, the values of π were varied between 0.1 and 0.9 with a stepping of 0.1. We wrote the FORTRAN codes PRGM3.F95 (see Online Appendix A) to investigate the different situations. Executing the FORTRAN codes lead to the results listed in Table A.2, as given in Online Appendix A.
From the results in Table A2, it is clear that the values of are equal for and and are again equal for and . To look at the behavior of the relative efficiency, values as k1 and k2 increase, we plotted versus for each value of π. This was done for each of the chosen values of and is presented in Figures 6 and 7. The results for the choice of are mirror image of the results for , and the results for are mirror image of , so those results are not presented in separate figures than Figures 6 and 7. From the graphical presentations, it is clear that just increasing the number of cards a respondent is to draw increases efficiency, but only to a certain point after which any increase is minimal. Note that if , then the proposed estimator has efficiency of 100 percent (if P = T). In another study, we found that if , then the proposed estimator may perform worse than the Odumade and Singh (2009) model for irrespective of the value of π. Thus, based on our study, we suggest using with a value between 2 and 6 which should not affect respondents’ cooperation. Requiring too many trials per respondent may at times be unacceptable; however, in the proposed model only a single response (the sum) is requested, so it seems likely that we would not be risking a loss of cooperation.
The versus with P = 0.30 and T = 0.30 for .
The versus with P = 0.35 and T = 0.35 for .
In the next section, we consider a further extension of the Odumade and Singh (2009) model based on “fixed and targeted trials” per respondent, which leads to a new alternative randomized response model.
Model III
Using the same decks of cards as before, respondents are asked to draw cards at random with replacement from each of the decks and, based on whether they belong to group A or not, to report different things.
Case I: Respondent belongs to group A. In this case, the respondent is asked to draw k1 cards from deck I. Let be the number of red cards drawn. They are then to draw cards from deck II until red cards appear. Let be the number of cards drawn. In this case, , that is follows a binomial distribution with parameters k1 and P; and that is follows a negative binomial distribution with parameters and T. Finally they are to report the sum ().
Case II: Respondent does not belong to group A. In this case, the respondent is asked to draw k1 cards from deck I. Let be the number of green cards drawn. They are to draw cards from deck II. Let be the number of green cards drawn. In this case, , that is follows a binomial distribution with parameters k1 and , and that is follows a negative binomial distribution with parameters and . Finally, they are to report the sum (X2 + Y2).
Taking π as before the true proportion of the sensitive characteristic in the population who belongs to the group A and be the true proportion of the sensitive characteristic in the population who belong to the nonsensitive group Ac, the distribution of observed responses , from the n respondents in a sample is again given by:
In other words, the observed response takes a values of with a probability of π and takes a value of with a probability of .
Now, we have the following theorems.
Theorem 7. An unbiased estimator of the population proportion π is given by:
Proof. Given that , , , and , so we have:
Now by the definition of expected value, from (34), we have
On solving it for π, we have
So we have
Taking expected value on both sides of (35), we have
which proves the unbiasedness.
Theorem 8. The variance of the unbiased estimator of the population proportion π is given by:
Proof. Given , , , and , we have:
Note that all the responses are independent, so by the definition of variance, we have
where
Now using (38), we have
On using (39) in (37), we have the theorem.
Theorem 9. An unbiased estimator of the variance of the proposed estimator of the population proportion π is given by:
Proof. Note that
So we get
which proves the theorem.
In the Relative Efficiency of the Model III subsection, we investigate situations where the proposed fixed and targeted trials randomized response model (model III) can perform better than the Odumade and Singh (2009) model.
Relative Efficiency of the Model III
We define the percent relative efficiency of the proposed estimator with respect to the Odumade and Singh (2009) estimator as:
Note that the values are free from the sample size but depend on the choice of randomization device parameters such as P, T, , , , and the value of π. We keep the same choice of P, and T in the proposed model III as in the Odumade and Singh (2009) model. In this simulation study, we consider four choices of P and T as 0.30, 0.35, 0.65, and 0.70 in the proposed fixed and targeted model and the Odumade and Singh (2009) model. In addition, we vary the values of , , and as 1, 2, 3 to search those choices for which the percent relative efficiency value remain higher than 100 percent. The values of π are changed between 0.1 and 0.9 with a step of 0.1. We wrote the FORTRAN codes PRGM4.F95 (see Online Appendix A) to investigate the different situations. Executing the above codes lead to the results listed in Table A3 (See Online Appendix A). From these results, one could conclude that the proposed model III can also be used to produce more efficient estimate than the Odumade and Singh (2009) model.
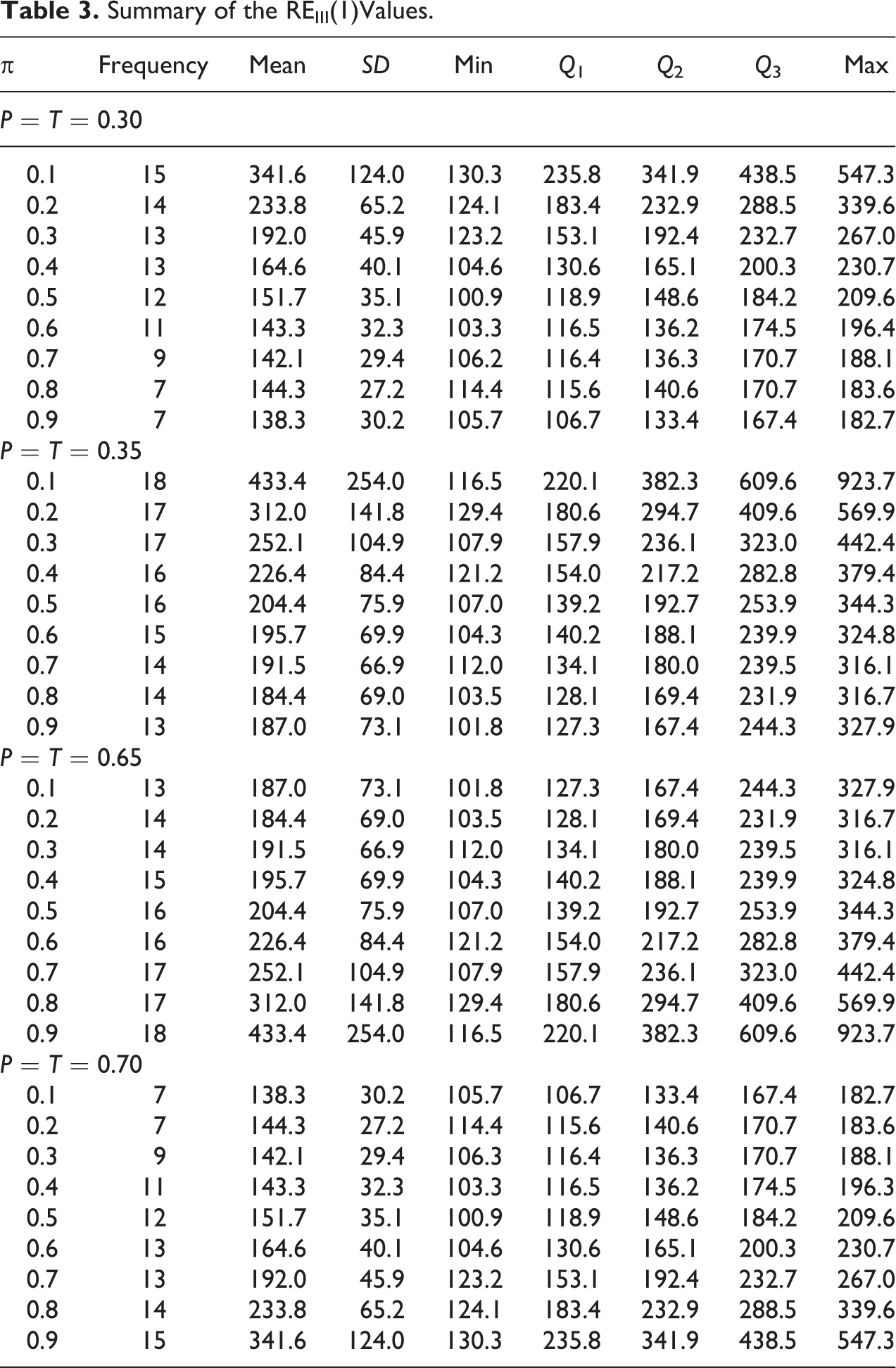
In Table 3, we present a summary of the values of the percent relative efficiency for each value of P = T and different values of π between 0.1 and 0.9.
Summary of the REIII(1)Values.
π
Frequency
Mean
SD
Min
Q1
Q2
Q3
Max
P = T = 0.30
0.1
15
341.6
124.0
130.3
235.8
341.9
438.5
547.3
0.2
14
233.8
65.2
124.1
183.4
232.9
288.5
339.6
0.3
13
192.0
45.9
123.2
153.1
192.4
232.7
267.0
0.4
13
164.6
40.1
104.6
130.6
165.1
200.3
230.7
0.5
12
151.7
35.1
100.9
118.9
148.6
184.2
209.6
0.6
11
143.3
32.3
103.3
116.5
136.2
174.5
196.4
0.7
9
142.1
29.4
106.2
116.4
136.3
170.7
188.1
0.8
7
144.3
27.2
114.4
115.6
140.6
170.7
183.6
0.9
7
138.3
30.2
105.7
106.7
133.4
167.4
182.7
P = T = 0.35
0.1
18
433.4
254.0
116.5
220.1
382.3
609.6
923.7
0.2
17
312.0
141.8
129.4
180.6
294.7
409.6
569.9
0.3
17
252.1
104.9
107.9
157.9
236.1
323.0
442.4
0.4
16
226.4
84.4
121.2
154.0
217.2
282.8
379.4
0.5
16
204.4
75.9
107.0
139.2
192.7
253.9
344.3
0.6
15
195.7
69.9
104.3
140.2
188.1
239.9
324.8
0.7
14
191.5
66.9
112.0
134.1
180.0
239.5
316.1
0.8
14
184.4
69.0
103.5
128.1
169.4
231.9
316.7
0.9
13
187.0
73.1
101.8
127.3
167.4
244.3
327.9
P = T = 0.65
0.1
13
187.0
73.1
101.8
127.3
167.4
244.3
327.9
0.2
14
184.4
69.0
103.5
128.1
169.4
231.9
316.7
0.3
14
191.5
66.9
112.0
134.1
180.0
239.5
316.1
0.4
15
195.7
69.9
104.3
140.2
188.1
239.9
324.8
0.5
16
204.4
75.9
107.0
139.2
192.7
253.9
344.3
0.6
16
226.4
84.4
121.2
154.0
217.2
282.8
379.4
0.7
17
252.1
104.9
107.9
157.9
236.1
323.0
442.4
0.8
17
312.0
141.8
129.4
180.6
294.7
409.6
569.9
0.9
18
433.4
254.0
116.5
220.1
382.3
609.6
923.7
P = T = 0.70
0.1
7
138.3
30.2
105.7
106.7
133.4
167.4
182.7
0.2
7
144.3
27.2
114.4
115.6
140.6
170.7
183.6
0.3
9
142.1
29.4
106.3
116.4
136.3
170.7
188.1
0.4
11
143.3
32.3
103.3
116.5
136.2
174.5
196.3
0.5
12
151.7
35.1
100.9
118.9
148.6
184.2
209.6
0.6
13
164.6
40.1
104.6
130.6
165.1
200.3
230.7
0.7
13
192.0
45.9
123.2
153.1
192.4
232.7
267.0
0.8
14
233.8
65.2
124.1
183.4
232.9
288.5
339.6
0.9
15
341.6
124.0
130.3
235.8
341.9
438.5
547.3
From Table 3, the results show in the case of that if , there were 15 choices of , , and , between 1 and 3 with percent over 100 percent, these have: a minimum value 130.3 percent, median 341.9 percent, and maximum 547.3 percent; if , there were 14 such choices these have: a minimum value 124.1 percent, median 232.9 percent, and maximum 339.6 percent; if , there were 13 such values these have: a minimum value 123.2 percent, median 192.4 percent, and maximum 267.0 percent; a minimum value 104.6 percent, median 165.1 percent, and maximum 230.7 percent if ; a minimum value 100.9 percent, median 148.6 percent, and maximum 209.6 percent if ; a minimum value 103.3 percent, median 136.2 percent, and maximum 196.4 percent if ; a minimum value 106.2 percent, median 136.3 percent, and maximum 188.1 percent if ; a minimum value 114.4 percent, median 140.6 percent, and maximum 183.6 percent if ; and a minimum value 105.7 percent, median 133.4 percent, and maximum 182.7 percent if .
Also Table 3 shows in case , that the corresponding values of the RE are 341.6 percent, 233.8 percent, 192.0 percent, 164.6 percent, 1,151.7 percent, 143.3 percent, 142.1 percent, 144.3 percent and 138.3 percent along with respective standard deviations of 124.0 percent, 65.2 percent, 45.9 percent, 40.1 percent, 35.1 percent, 32.3 percent, 29.4 percent, 27.2 percent, and 30.2 percent for π equal to 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, and 0.9, respectively. In the same way, the rest of the results in Table 3 can be interpreted. It is interesting to see that if the value of π is close to 0, then the gain in relative efficiency of the proposed model is higher indicating that the proposed model could be more useful when the prevalence of a sensitive characteristic is not too high in a population under study. Figure 8 shows the percentage relative efficiency of the proposed fixed and targeted randomized response model with respect to the Odumade and Singh (2009) model for different values of π between 0.1 and 0.9.
values versus π between 0.1 and 0.9.
Conclusion
Thus, based on our simulation study, we conclude that the proposed new estimators can be used more efficiently and without altering the respondent’s cooperation than both Odumade and Singh (2009) and Singh and Grewal (2013) models by making a reasonable choice of parameters.
Supplemental Material
Supplemental Material, michael_paper2_updated_revised - Alternative Methods to Make Efficient Use of Two Decks of Cards in Randomized Response Sampling
Supplemental Material, michael_paper2_updated_revised for Alternative Methods to Make Efficient Use of Two Decks of Cards in Randomized Response Sampling by Michael Lee Johnson, Stephen A. Sedory, and Sarjinder Singh in Sociological Methods & Research
Footnotes
Acknowledgments
The authors are thankful to the editor in chief, Professor Christopher Winship, admin, Genevieve Butler, and two referees for their constructive comments on the original version of this article.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Supplemental Material
Supplemental material for this article is available online.
References
1.
ChaudhuriA.2011. Randomized Response and Indirect Questioning Techniques in Surveys. Boca Raton, FL: Chapman and Hall/CRC.
FoxJ. A.2016. Randomized Response and Related Methods: Surveying Sensitive Data. 2nded. CA: Sage.
4.
FoxJ. A.TracyP. E.. 1986. Randomized Response: A Method for Sensitive Surveys. Beverly Hilss, CA: Sage.
5.
GjestvangC. R.SinghS.. 2006. “A New Randomized Response Model.” Journal of the Royal Statistical Society Series B68:523–30.
6.
JohnsonMichael L.2014. “Improved Randomized Response Techniques.” Unpublished manuscript, Thesis submitted to the Department of Mathematics, Texas A&M University–Kingsville, Kingsville.
7.
KerkvlietJ.1994. “Estimating a Logit Model with Randomized Data: The Case of Cocaine Use.” The Australian Journal of Statistics36:9–20.
8.
KukA. Y. C.1990. “Asking Sensitive Questions Indirectly.” Biomerika77:436–38.
9.
LeeC.-SSedoryS. A.SinghS.. 2013. “Simulated Minimum Sample Sizes for Various Randomized Response Models.” Communications in Statistics: Simulation and Computation42:771–89.
10.
MangatN. S.1994. “An Improved Randomized Response Strategy.” Journal of the Royal Statistical Society: Series B56:93–95.
11.
MangatN. S.SinghR.. 1990. “An Alternative Randomized Response Procedure.” Biometrika77:439–42.
12.
SinghS.2003. Advanced Sampling Theory with Applications: How Michael Selected Amy. Dordrecht, the Netherlands: Kluwer Academic.
13.
SinghS.GrewalI. S.. 2013. “Geometric Distribution as a Randomization DEVICE Implemented to the Kuk’s Model.” International Journal of Contemporary Mathematical Sciences8:243–48.
14.
SuS.-CSedoryS. A.SinghS.. 2015. “Kuk’s Model Adjusted for Protection and Efficiency.” Sociological Methods & Research44:534–51.
15.
OdumadeO.SinghS.. 2009. “Efficient Use of Two Decks of Cards in Randomized Response Sampling.” Communications in Statistics—Theory and Methods38:439–46.
16.
WarnerS. L.1965. “Randomized Response: A Survey Technique for Eliminating Evasive Answer Bias.” Journal of the American Statistical Association60:63–69.
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.