
Abstract
Swarm intelligence optimization algorithm has been proved to perform well in the field of parameter optimization. In order to further improve the performance of intelligent optimization algorithm, this paper proposes an improved and adaptive tunicate swarm algorithm (IMATSA) based on tunicate swarm algorithm (TSA). IMATSA improves TSA in the following four aspects: population diversity, local search convergence speed, jumping out of local optimal position, and balancing global and local search. Firstly, IMATSA adopts Tent map and quadratic interpolation to initialize population and enhance the diversity. Secondly, IMATSA uses Golden-Sine algorithm to accelerate the convergence of local search. Thirdly, in the process of global development, IMATSA adopts Levy flight and the improved Gauss disturbance method to adaptively improves and coordinates the ability of global development and local search. Then, this paper verifies the performance of IMATSA based on 14 benchmark functions experiment, ablation experiment, parameter optimization experiments of Support Vector Machine (SVM) and Gradient Boosting Decision Tree (GBDT), Wilcoxon signed rank test and image multi-threshold segmentation experiment with the performance metrics are convergence speed, convergence value, significance level P-value, Peak Signal-to-Noise Ratio (PSNR) and Standard Deviation (STD). Experimental results show that IMATSA performs better in three kinds of benchmark functions; each component of IMATSA has a positive effect on the performance; IMATSA performs better in parameter optimization experiments of SVM experiment and GBDT; there is significant difference between IMATSA and other algorithms by Wilcoxon signed rank test; in image segmentation, the performance is directly proportional to the number of thresholds, and compared with other algorithms, IMATSA has better comprehensive performance.
Keywords
Introduction
Intelligent optimization algorithm [8,9,13] has been proved to be effective in solving parameter optimization problems [33,34,36], image segmentation [17,31], and other engineering application fields. Intelligent optimization algorithm has a good research and development prospect, including sooty tern optimization algorithm (STOA) [1,7], sailed fish optimizer (SFO) [20,28], grey wolf optimization (GWO) [25,30], butterfly optimization algorithm (BOA) [3,37], supply-demand-based optimization (SDO) [42], pathfinder algorithm (PFA) [40], whale optimization algorithm (WOA) [23] and other optimization algorithms, etc.
Kaur et al. [15] proposed tunicate swarm algorithm (TSA) in 2020. Kaur compared TSA with other swarm intelligence optimization algorithms, and the results show that TSA can find the optimal solution quickly. Based on gradient free optimization technology, TSA has strong development ability and performs well in the field of function optimization. However, the search method of TSA is lack of flexibility and mobility, so it is difficult to jump out of the local optimal position. By directly aggregating to the global optimum, the global search of TSA is insufficient. In the follow-up research, some scholars applied TSA to different research fields and achieved some results. In solving the problem of unknown search points, Sharma [29] used TSA to estimate the optimal value of unknown parameters of photovoltaic cell modules under standard temperature conditions, which effectively proves the superiority of TSA in extracting optimal parameters from photovoltaic cells. Daniel [6] applied TSA algorithm to feature selection to solve the scalability problem caused by large feature set. Fetouh [10] applied TSA to the distribution system to find the optimal solution to provide quantitative and qualitative power services and reduce energy consumption. In order to solve the problems of insufficient global exploration ability, low optimization accuracy and slow convergence speed of TSA, Li [19] improved the TSA algorithm by using chaos initialization and global search vector, then applied it to solve the dynamic economic emission scheduling problem. Houssein [12] integrated TSA with a local escaping operator (LEO) for overcoming the weaknesses of the original TSA, and proposed TSA-LEO. The LEO strategy in TSA-LEO prevents searching deflation in TSA and improves the convergence rate and local search efficiency of swarm agents.
Based on gradient free optimization technology, TSA has strong development capability and performs well in the field of function optimization. However, the search method of TSA lacks flexibility and mobility, and it is difficult to jump out of the local optimal position. Moreover, as a result of using the method of direct aggregation to the global optimal location, the global search of TSA is insufficient. In order to further improve the performance of TSA, this paper proposes IMATSA and improves TSA in four aspects: population diversity, local search convergence speed, ability to jump out of local optimal position, and balancing global and local search. Firstly, IMATSA proposes a method of combining Tent map and quadratic interpolation for population initialization to improve population diversity; secondly, IMATSA uses Golden-Sine algorithm to accelerate the convergence of local search and improve the local search capability; thirdly, IMATSA adopts Levy flight and the improved Gauss disturbance method to disturd the optimal position, which improves the ability of the algorithm to jump out of the local optimal position, and effectively balances the global and local search. Then, this paper applys IMATSA in the fields of image segmentation and other parameter optimization problems.
In order to verifies the performance of IMATSA, this paper designs a variety of experiments, including benchmark functions experiment, ablation experiment, parameter optimization experiment of Support Vector Machine (SVM), parameter optimization experiment of Gradient Boosting Decision Tree (GBDT), Wilcoxon signed rank test and image multi-threshold segmentation experiment. The performance metrics of benchmark functions experiment, ablation experiment and parameter optimization experiments are convergence speed and convergence value; the performance metrics of Wilcoxon signed rank test are convergence value and significance level P-value; and the performance metrics of image multi-threshold segmentation experiment are Peak Signal-to-Noise Ratio (PSNR) and Standard Deviation (STD).
Experiments show that IMATSA performs better in benchmark function experiment, and the experimental results are ahead of most orders of magnitude; each improvement has a certain positive effect; in the parameter optimization experiments of SVM and GBDT, the convergence values of IMATSA are better; the value of significance level P-value in Wilcoxon signed rank test are all less than 0.05, and there is significant difference between IMATSA and other algorithms; in image multi threshold segmentation experiments, IMATSA has better PSNR and MEAN in most scenes, and the performance is directly proportional to the number of thresholds.
Methods
Tunicate swarm algorithm
TSA simulates the jet propulsion behavior and group behavior of tunicates, and the theory is novel. Jet propulsion behavior is mainly composed of three parts: avoiding individual position conflict, approaching the best individual and moving to the best individual. In group behavior, the tunicates perceive the changes of water flow through the peripheral nerves, determine their positions based on the light emitted by their companions, and gather together to the target food source to achieve the effect of group foraging. The algorithm can truly simulate the foraging behavior of tunicates in the ocean, and has certain optimization ability and accuracy.
Jet propulsion behavior
Before jet propulsion, the tunicates need to avoid the conflict of individuals. In order to avoid the conflict, a new position vector will be calculated, and the functional equations are given as follows:
Where
Where
After avoiding the conflict of domain search location, the individual moves towards the food source. In this process, the distance between the individual and the food source position needs to be calculated. The functional equation is given as follow:
Where t represents the number of iterations,
The search individual keeps moving to the position of food source. The functional equation is given as follow:
Where
Group behavior
After avoiding individual conflict and calculating the distance between the search individual and the food source, the individual converges to the food source position based on the group behavior, and adjusts the individual position according to the food source. The functional equation is given as follow:
Where
Improvements
Tent map and quadratic interpolation
In the later stage of optimization, the population diversity of TSA decreases and the probability of falling into the local optimal position increases, resulting in insufficient convergence accuracy. In this paper, a Tent map and quadratic interpolation method is proposed to initialize the population and enhance the population diversity.
Chaotic map is based on nonlinear theory, which means that in a deterministic system, there is a seemingly random irregular motion. It can traverse all states according to the characteristics in a certain range, with the characteristics of ergodicity, nonlinearity, randomness and universality.
At present, logistic map and Tent map are the most common chaotic map methods. Research [21] shows that Tent map has better ergodicity than logistic map. Tent map is a piecewise linear map in the field of mathematics, with good correlation and uniform distribution function. The chaotic sequence of Tent map has uniform interval distribution and fast iteration speed. The functional equation of Tent map is given as follow:
Figure 1 depicted the sequence distribution histogram of Tent map, in which the maximum number of iterations is 500 and the number of intervals is 20. As can be seen from Fig. 1, the Tent map is evenly distributed.

Tent map sequence distribution histogram.
After initializing the population with Tent map, this paper uses quadratic interpolation (QI) method to create new individuals to enhance the diversity and make the distribution more uniform. Experimental results [32] show that the application of quadratic interpolation as a local search operator to meta heuristic algorithm can effectively enhance the local search ability of the applied algorithm.
QI uses the curve to fit the shape of the quadratic function. It is a local search operator to fit the optimal value of the function with the calculated curve extreme points.
Supposing X and Y are the two random positions of the population in the D dimension problem, the current global optimal position is Z, the functional equation of parabola passing through
The functional equations of second-order polynomial are as follows:
Based on the functional equations (10), (11) and (12),
If
Based on the functional equation (14), a new individual
This paper proposes a Tent map and QI strategy. The new strategy firstly initializes the population according to the Tent map, and then generates new individuals according to QI. Then, all individuals of the two populations are ordered according to the fitness values, and the best individuals are selected as the final initialization population, which improves the quality of the whole population. The processes are summarized as follows:
Within the upper and lower limits, N positions are initialized according to the Tent map as the initial population positions.
New individuals are generated according to QI.
The initial and new individuals are merged, the fitness values after merging are reordered, and the first N individuals are selected as the final initial populations.
The Golden-Sine algorithm [35] is based on the design of sine function in mathematics, and improves the optimization performance by using the golden section coefficient. It is a new intelligent algorithm, which can be divided into three steps, including population initialization, golden section coefficient and updating position. In this paper, IMATSA uses Golden-Sine to reduce the search space in the local search stage to approximate the optimal solution of the algorithm and speed up the convergence speed.
The initial step of Golden-Sine is to update the initial space by randomly generating a uniform distribution of each dimension. The functional equation is given as follow:
Where
In the process of updating position, the golden section coefficient is introduced to reduce the space, so as to guide the individual to approach the optimal value.
Where
The Golden-Sine updates the individual position according to the following equation:
Where
The principle of Golden-Sine is to use the unit circle scanning of sinusoidal function, which is similar to the spatial search of the solution of the problem to be optimized, and reduce the search space through the golden section ratio to approximate the optimal solution of the algorithm.
In this paper, after updating the individual position by using equation (7) of group behavior, IMATSA uses Golden-Sine to accelerate the convergence speed and update the individual position again. The equation is as follow:
Levy flight
Levy flight is a random walking strategy [39], and its moving step size conforms to the stable distribution of a heavy tail, moving alternately for a short distance and a relatively long distance. Therefore, using Levy flight strategy in swarm intelligence optimization algorithm can effectively improve the search range, the diversity of search and the ability of jumping out of the local optical position.
In this paper, the equation for updating the optimal position according to Levy flight is as follows:
Where
This paper constructs Levy flight step disturbance method, and the equations of are shown are as follows:
Where i is the individual, j is the current dimension of the individual, u and v are generated according to the current individual dimension J, u and v belong to normal distribution,
Improved Gauss disturbance
Gauss disturbance strategy [11] refers to adding Gauss local disturbance term in the optimization process, so as to increase the probability of the algorithm jumping out of the local optimal position, maintain the population diversity and avoid premature convergence. In this paper, an improved Gauss disturbance strategy is proposed to disturb the optimal position, which enhances the search ability and convergence accuracy of the algorithm. In the iterations, Gauss disturbance is applied to the current optimal position. The functional equation of Gauss disturbance before improvement is as follow:
In order to coordinate the global and local search ability of tunicate swarm algorithm,
The processes of IMATSA
Firstly, after the parameters are setted, the initial population is created by Tent map method, and the new population is created by QI; then, the initial population and new population are reordered by fitness values, and the first D individuals are selected as the final initial population.
Secondly, IMATSA is executed based on parameters and population. After the j individual of the i iteration is executed, the Golden-Sine algorithm is executed for the j individual to accelerate the convergence of local search.
Thirdly, IMATSA adopts Levy flight and the improved Gauss disturbance method to disturd the optimal position, which can adaptively improve and coordinate the ability of global development and local search. In order to give full play to the effects of Levy flight and the improved Gauss disturbance, the probability parameter p is set in this paper. p belongs to
Fourthly, when the number of iterations is equal to

The processes of IMATSA.
In order to verify the performance of IMATSA, several type experiments are designed in this paper. The benchmark functions, parameter optimization experiments of SVM and GBDT can test the general performance of the algorithm. The Wilcoxon signed rank test can verify whether there are significant differences in performance between IMATSA and other algorithms. The experiment of image multi threshold segmentation can test the image segmentation performance of the algorithm. All experiments in this paper are operated on the PC with 1.19 GHz CPU and 16 GB memory, python development language and pycharm development software. The operating system is windows 10 and 64 bit.
The experiment of benchmark functions
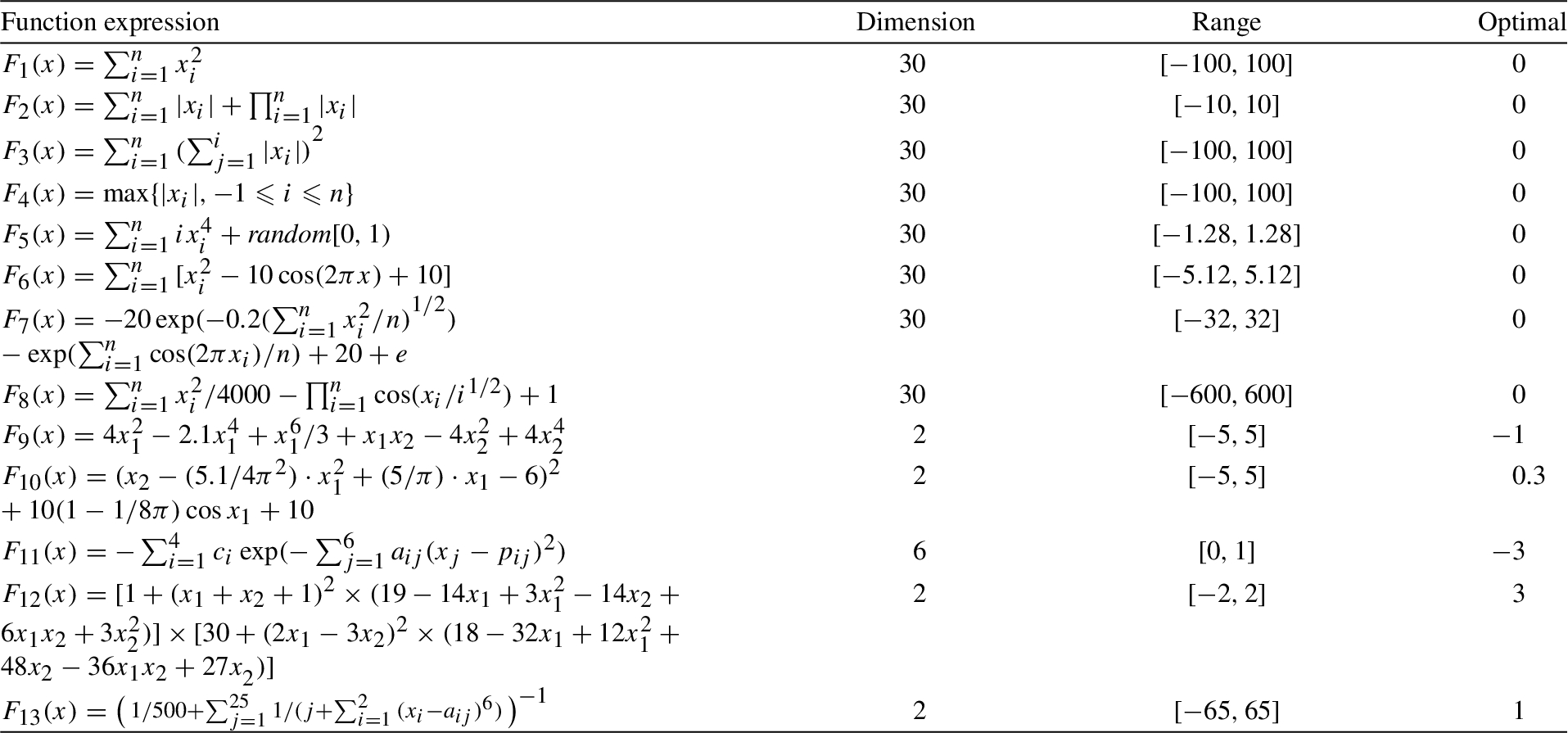
14 benchmark functions [38] are used in the experiments. The parameters are depicted in Table 1, and the benchmark functions are depicted in Table 2.
Parameters of the algorithms
Parameters of the algorithms
In Table 2,
Benchmark functions
The experimental results of benchmark functions are depicted in Table 3 and Table 4. In unimodal functions
Experimental results of STOA, SFO, GWO, BOA, IMATSA
Experimental results of SDO, PFA, TSA, TSA-LEO, IMATSA
Figure 3 depicts the convergence graph of the benchmark functions. With the limited space, the convergence diagrams of
The following is the description of the functions not shown in Fig. 3. For unimodal functions
In this paper, the ablation experiments are designed to verify the effect of each improvement of IMATSA. The bench functions used in ablation experiments are the same as those in Table 2. The experimental results are depicted in Table 5. As shown in Table 4, with the addition of every improvement, the MEAN and STD are better and better.

The convergence graph of benchmark functions.
The results of ablation experiments
Support vector machines (SVM) can transformed the linear classification boundary into nonlinear classification boundary by means of kernel function, so as to obtain better generalization performance. SVM is usually used for classification or regression problems [4,22,43].
Based on different algorithms, this paper optimizes the C and gamma of SVM parameters to search the partition hyperplane that meets the maximum interval. The population size is 100, and the number of iterations is 100.
C [27] controls the punishment degree of sample misclassification, which reflects the balance between model classification performance and complexity. Gamma is the coefficient of RBF [16] kernel function, which implicitly changes the mapping function and controls the performance of feature space.
Figure 4 depicts the convergence graph of the classification error rate based on different algorithms. From Fig. 4, IMATSA has the fastest convergence rate and the lowest classification error rate, and the comprehensive performance of IMATSA is better.
Parameter optimization experiment of GBDT
Gradient Boosting Decision Tree (GBDT) is an iterative decision tree algorithm, which is composed of multiple decision trees. The conclusions of all trees are accumulated to make the final answer. The core idea is to fit the residual of the previous round of learners through the negative gradient of the loss function. GBDT is usually used for classification or regression problems [5,18,41].
Based on different algorithms, this paper optimizes four parameters of GBDT to reduce classification error rate, including max_depth, subsample, min_samples_leaf and min_samples_split. The population size is 5, and the number of iterations is 10.
max_depth is the maximum depth of the decision tree. subsample is the proportion of subsampling, which belongs to
Figure 5 depicts the convergence graph of the classification error rate based on different algorithms. From Fig. 5, IMATSA has the fastest convergence rate and the lowest classification error rate, and the comprehensive performance of IMATSA is better.
Wilcoxon signed rank test
Based on parameter optimization experiments of GBDT, the Wilcoxon signed rank test [2,14] is designed to verify whether there are significant differences in performance between IMATSA and other algorithms.
In the parameter optimization experiments of GBDT, the algorithms are executed 5 times and 10 times respectively. Then the Wilcoxon signed rank test with significance level being 0.05 is performed. The assumptions are given as follows:
H0: there is no significant difference about classification error rate between IMATSA and other algorithms.
H1: there is significant difference about classification error rate between IMATSA and other algorithms.
Table 6 depicts the results of Wilcoxon signed rank test. The values are less than 0.05. Therefore, H1 is accepted. There is significant difference about classification error rate between IMATSA and other algorithms.
The experiment of image multi threshold segmentation
Threshold segmentation methods
In the field of image segmentation, threshold segmentation method is a typical method. This paper extends the threshold segmentation methods based on Otsu and Renyi entropy to multi-threshold segmentation method.
The principle of multi-threshold segmentation is to determine the threshold group
For the image with gray level
In 1979, a threshold segmentation method named Otsu [24] was proposed. Otsu dynamically determines the threshold based on the maximum inter class variance. In this paper, a multi-threshold segmentation method is realized based on Otsu, and the gray mean value of each part is
The Renyi entropy [26] quantifys the value of entropy, and maximizes the sum of entropy between segmented target and background. In this paper, a multi-threshold segmentation method is realized based on Renyi entropy, and the gray mean value of each part is
The processes of multi-threshold segmentation method based on IMATSA
If the threshold vector is

The SVM convergence graph of the classification error rate.

The GBDT convergence graph of the classification error rate.
Wilcoxon signed rank test

The processes of multi-threshold segmentation method based on IMATSA.
Baboon, Barbara, Goldhill, and Peppers in the classical threshold segmentation data set are selected as the detection images.
The comparitive algorithms are IMATSA, TSA-LEO, GWO, SFO, BOA and WOA, The population size is 100, the number of iterations is 100, and each algorithm run independently for 20 times. Peak Signal-to-Noise Ratio (PSNR) and Standard Deviation (STD) are used as experimental indicators, and the functional equations are as follows:
The experimental results of IMATSA are depicted as Table 7 and Table 8. It can be seen from Table 7 and Table 8 that in the threshold segmentation experiments of different images, with the increase of the number of thresholds, the PSNR and MEAN become better and better, and the performance is directly proportional to the number of thresholds.
Experimental results based on Otsu
Experimental results based on Otsu
Experimental results based on Renyi entropy
Table 9 depict the experimental results of IMATSA, TSA-LEO and GWO based on Otsu. Table 10 depict the experimental results of SFO, BOA and WOA based on Otsu. Compared with TSA-LEO, GWO, SFO and BOA, IMATSA has better convergence stability and PSNR value. The overall performance of IMATSA is better.
Experimental results based on Otsu of IMATSA, TSA-LEO and GWO
Experimental results based on Otsu of IMATSA, SFO and BOA
Table 11 depict the experimental results of IMATSA, TSA-LEO and GWO based on Renyi entropy. Table 12 depict the experimental results of SFO, BOA and WOA based on Renyi entropy. Compared with TSA-LEO, GWO, SFO and BOA. The overall performance of IMATSA is also better.
Experimental results based on Renyi entropy of IMATSA, TSA-LEO and GWO
Experimental results based on Renyi entropy of IMATSA, SFO and BOA
The segmentation effect of IMATSA based on Otsu and Renyi entropy are shown in Fig. 7 and Fig. 8 respectively. As can be seen, the segmentation effect is directly proportional to the number of thresholds. With the number of thresholds increasing, the detail processing and segmentation quality are better.

Segmentation effect based on Otsu.

Segmentation effect based on Renyi entropy.
In the field of parameter optimization, swarm intelligence optimization algorithm has broad prospects. At present, swarm intelligence optimization algorithm has made some achievements in the field of parameter optimization. However, the single search methods of many swarm intelligence optimization algorithms lead to lack of flexibility and mobility, and it is difficult to jump out of the local position. As a new swarm intelligence optimization algorithm, TSA also has some problems to some extent, such as lack of group diversity, local development and global search to be optimized.
This paper improves TSA in three aspects, including enhancing population diversity, local development ability and global search ability. At the same time, the algorithm proposed by this paper can adaptively coordinate and balance the local development and global search ability under a certain probability through the improved Gauss disturbance method. Based on the above improvements, this paper proposes an improved and adaptive tuner swarm algorithm (IMATSA).
A population with good distribution and randomness can be created by Tent map, and then the uniformity of the population can be further strengthened by QI. In terms of enhancing population diversity, this paper propose a Tent map and QI strategy. A population with good distribution and randomness can be created by Tent map, and then the uniformity of the population can be further strengthened by QI. Firstly, The new strategy initializes the population by Tent map, and generates new individuals according to QI. Secondly, all individuals are ordered according to the fitness values. Thirdly, the best individuals are selected as the final initialization population.
In terms of enhancing local development ability, this paper adopts Golden-Sine algorithm to reduce the search space in the local search stage to approximate the optimal solution of the algorithm and speed up the convergence speed. The principle of Golden-Sine is to use the unit circle scanning of sinusoidal function, which is similar to the spatial search of the solution of the problem to be optimized, and reduce the search space through the golden section ratio to approximate the optimal solution of the algorithm. In this paper, after updating the individual position by group behavior, IMATSA uses Golden-Sine to accelerate the convergence speed and update the individual position again.
In terms of enhancing the global search ability, this paper adopts Levi flight to improve the search range under a certain probability, and the probability value can be dynamically adjusted according to different scenes, so as to enhance the population diversity and the ability to jump out of the local optimal position. Levy flight is a random walking strategy, and its moving step size conforms to the stable distribution of a heavy tail, moving alternately for a short distance and a relatively long distance. In this paper, after each iteration, the current optimal position and fitness value are updated by Levy flight strategy, so as to improve the search range search range.
In terms of coordinating the local development and global search ability, this paper proposes an improved Gauss disturbance strategy to disturb the optimal position. In the early stage of the algorithm, the algorithm has strong global exploration ability; In the middle and later stage, gradually decreases, and the algorithm will do more sufficient local search. In this paper, after each iteration, the current optimal position and fitness value are updated by improved Gauss disturbance strategy under a certain probability, and the probability value can be dynamically adjusted according to different scenes.
In order to verify the performance of IMATSA, this paper has designed various types of experiments, including three kinds of benchmark functions experiment, ablation experiment, parameter optimization experiments of Support Vector Machine (SVM) and Gradient Boosting Decision Tree (GBDT), Wilcoxon signed rank test and image multi-threshold segmentation experiment. The benchmark functions, parameter optimization experiments of SVM and GBDT can test the general performance of the algorithm. The Wilcoxon signed rank test can verify whether there are significant differences in performance between IMATSA and other algorithms. The experiment of image multi threshold segmentation can test the image segmentation performance of the algorithm. Experimental results show that IMATSA performs better in the all kinds of benchmark functions; each component of IMATSA has a positive effect on the performance; IMATSA performs better in parameter optimization experiments of SVM experiment and GBDT; there is significant difference between IMATSA and other algorithms by Wilcoxon signed rank test; in image segmentation, the performance is directly proportional to the number of thresholds, and compared with other algorithms, IMATSA has better comprehensive performance.
There also exists a problem of a lack of application and business scenarios in IMATSA. In this paper, IMATSA has been tested and demonstrated in the scenarios of benchmark functions, machine learning and image segmentation, but it has not been verified in specific business scenarios, such as operation research optimization, task scheduling and so on. The optimization accuracy, speed and stability of imatsa under more business scenarios need to be further verified.
For future work, this team will continue to enrich the business scenarios, and investigate and compare the performance of IMATSA and other algorithms in the further studies. In addition, this team will design more types and numbers of experiments for different business scenarios, and continuously improve the algorithm according to the experimental results.
Conclusion
In order to improve the performance of TSA, this paper proposes IMATSA. Firstly, IMATSA adopts Tent map and QI to initialize the population. Secondly, this paper adopts Golden-Sine algorithm to accelerate the convergence of local search. Thirdly, this paper adopts Levy flight strategy to improve the search range under a certain probability. Finally, this paper adopts improved Gauss disturbance to disturb optimal solution, which can improve the population diversity, and coordinate the local development and global search ability.
In order to verify the performance of IMATSA, this paper designs various types of experiments, including benchmark functions, ablation experiment, parameter optimization experiments of SVM and GBDT, Wilcoxon signed rank test, and image multi threshold segmentation experiment.
Experiments show that IMATSA performs better in the three kinds of benchmark functions, parameter optimization experiments of SVM and GBDT; each component of IMATSA has a positive effect on the performance; there is significant difference between IMATSA and other algorithms; the performance is directly proportional to the number of thresholds, and compared with other algorithms, IMATSA has better comprehensive performance.
In the follow-up research work, the performance of IMATSA will be further optimized and applied to more research fields and business scenarios.
Footnotes
Acknowledgements
This research was funded by the National Natural Science Foundation of China, grant number 61762009 and this research was funded by the Natural Science Foundation of Guangxi Province of China, grant number 2020GXNSFAA159090.