
Abstract
Dynamic link prediction is an important component of the dynamic network analysis with many real-world applications. Currently, most advancements focus on analyzing link-defined neighborhoods with graph convolutional networks (GCN), while ignoring the influence of higher-order structural and temporal interacting features on link formation. Therefore, based on recent progress in modeling temporal graphs, we propose a novel temporal motif-based attentional graph convolutional network model (TMAGCN) for dynamic link prediction. As dynamic graphs usually contain periodical patterns, we first propose a temporal motif matrix construction method to capture higher-order structural and temporal features, then introduce a spatial convolution operation following a temporal motif-attention mechanism to encode these features into node embeddings. Furthermore, we design two methods to combine multiple temporal motif-based attentions, a dynamic attention-based method and a reinforcement learning-based method, to allow each individual node to make the most of the relevant motif-based neighborhood to propagate and aggregate information in the graph convolutional layers. Experimental results on various real-world datasets demonstrate that the proposed model is superior to state-of-the-art baselines on the dynamic link prediction task. It also reveals that temporal motif can manifest the essential dynamic mechanism of the network.
Introduction
A network,1
Graph and network can be used interchangeably.
Link prediction, considered as one of the vital tasks in various data mining applications, has drawn attention for decades and several methods have been applied in this domain [5]. These methods can be classified into substantial types such as similarity-based indices, probabilistic methods, content-based methods, and embedding-based methods, etc. A majority of the previous approaches mainly focus on static graphs without considering the graph evolution. However, many graphs in real-world applications are intrinsically dynamic, in which links between nodes dynamically change over time [6]. Examples include academic co-authorship networks where authors may periodically switch their collaboration behaviors, and social networks where individual users may continuously change their association or communication relationships with others. Aiming to predict whether a link will form between two nodes in the future based on past network information, link prediction in dynamic networks has become a significant research topic in recent years. It is inherently challenging because continual complex interacting behaviors between nodes can give rise to the non-linear transformation of underlying structures. Conventional link prediction methods using neighborhood-based node similarities in static graph settings such as Common Neighbors (CN), Katz, Preferential Attachment (PA), Jaccard Coefficient (JC), have been adapted to dynamic networks by allowing the latent features to change over time [7, 8, 9, 10, 11, 12, 13]. These approaches represent dynamic graphs as a sequence of graph snapshots from different time stamps, and take advantage of historical information to predict links of the next moment. Although those methods often work well in the respect of computing complexity, they can hardly extract the hidden network structure and overcome the problem of low link prediction accuracy.
In order to model the non-linear transformation of network structure, some dynamic network embedding methods [1, 14, 15, 16, 17, 18] have been proposed to capture the dynamic evolution pattern. Recently, graph neural networks (GNNs) [19, 20, 21] for dynamic link prediction have emerged and achieved excellent results in many aspects. Typical methods [22, 23, 24, 25, 26] are to inject the dynamism into the parameters of GCN [27] through recurrent neural network (RNN). They use GCNs as a feature extractor and RNNs for sequence learning from the extracted features. One limitation of these methods is that none of them consider time at finer level and they fail to capture both topological evolution and interactions simultaneously. Most real-world graphs exhibit at least two distinct dynamic processes that evolve at different time scales: (a) Long-term association: the number of nodes and links are expected to grow (or shrink) over time leading to structural changes in the graph; (b) Communication: it relates to activities between nodes that may or may not be structurally connected. In order to capture both topological evolutions and interactions simultaneously, Trivedi et al. [28] proposed a two-time scale deep temporal point process model, i.e. DyRep, to capture the continuous-time fine-grained temporal dynamics of the two observed processes. Knyazev et al. [29] further extended DyRep by replacing concatenation with bilinear layers to permit more complex relationships between node representations, and this extension achieved the-state-of-art performance.
However, these methods only focus on the binary relationship (i.e., link) in the graph, and ignore the higher-order connectivity patterns (e.g., motifs) in the graph. In static networks, higher-order structural units such as motifs [30] are indicative and informative subgraph patterns recurring frequently in a graph, whose counts are significantly higher than that in random networks. In temporal networks, temporal motifs [31] are defined as induced subgraphs on sequences of temporal links. It has been proved that higher-order connectivity patterns such as network motifs are essential to understanding the fundamental mechanism that control and mediate the behavior of many complex systems [32, 33]. Therefore, temporal motifs can capture both temporal and structural features for dynamic link prediction.
Figure 1 is a toy example illustrating why higher-order structural and temporal information matters. In Fig. 1, three avatar nodes represent one boy student, one girl student and one tutor. At the present time
An example to illustrate that nodes can benefit from using temporal motifs compared to link-defined neighborhood.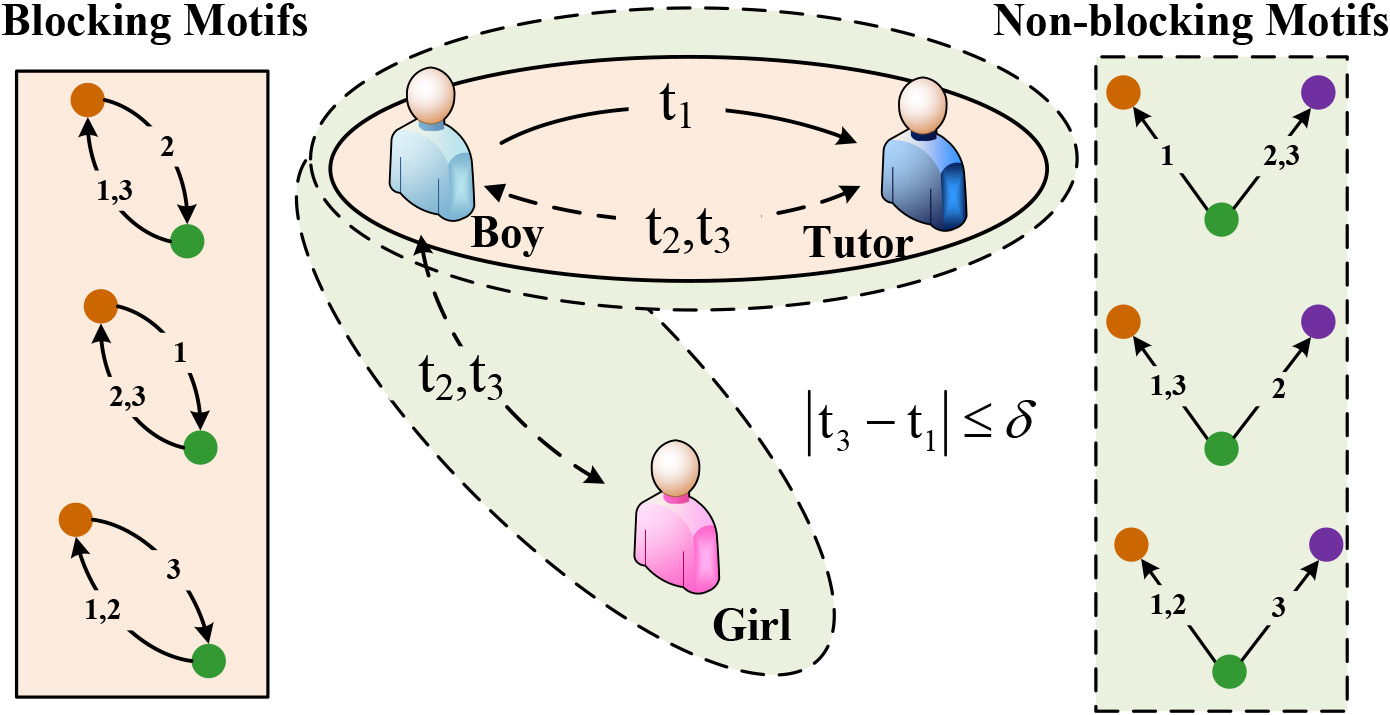
Inspired by recent work on attention mechanism, we propose a novel model, named temporal motif-based attentional graph convolutional network (TMAGCN), to incorporate such higher-order structural and temporal information into node embeddings for dynamic link prediction. The main contributions of this work are summarized as follows:
We develop a temporal network motif matrix construction method to capture higher-order structural and temporal features. The respective field around a target node of interest is defined by combining temporal motif matrix with adjacency matrix. We propose a novel model, TMAGCN, to model interleaved evolution of two-time scale series processes from a graph-based perspective. To the best of our knowledge, it is the first time to bridge the gap between the power of graph neural network and temporal motif in dynamic link prediction study. Two methods to combine multiple temporal motif-based attention, a dynamic attention-based method and a reinforcement learning-based method, are proposed to allow each individual node to make the most of the relevant motif-based neighborhood to propagate and aggregate information in the graph convolutional layers for updating node embeddings. We conduct extensive experiments to comprehensively evaluate TMAGCN on the dynamic link prediction task using various real-world datasets. Experimental results show that the proposed method consistently outperforms the state-of-the-art methods on dynamic graphs. Qualitative analysis through embedding visualization is further presented to show the effectiveness of TMAGCN.
The remainder of the paper is organized as follows. Section 2 discusses related work on dynamic link prediction and network motif. Section 3 formulates the preliminaries and some necessary definitions of the problem. Section 4 details the proposed TMAGCN. Section 5 presents datasets, experimental settings and the experimental results. Finally, the conclusion is drawn and possible directions for future work are outlined in Section 6.
This section will introduce recent advances in link prediction with a primary focus on representation learning methods for dynamic link prediction, as well as higher-order structures with network motifs.
Dynamic Link prediction.
Link prediction has been widely studied and successfully applied to several domains. Numerous methods of link prediction have been proposed and can be grouped into several categories, like topology-based similarity metrics, probabilistic and maximum likelihood-based models, dimensionality reduction-based methods, learning-based models, etc. [5] A majority of these methods were originally proposed for static graphs.
However, most real-world networks are actually dynamic and keep evolving with time [34]. The dynamic link prediction problem is more complex. Methods for dynamic graphs are often the extensions of those for static ones, with an additional focus on the temporal dimensions and update rules. Taking the topology-based similarity metrics as an example, the larger the similarity is, the more likely two nodes will establish a link. A bunch of dynamic link prediction technologies [7, 8, 9, 10, 11, 12, 13, 35] utilize the topology information of the network to define the similarity of nodes, named structural similarity indices, including local similarity indices and global similarity indices. For example, Günes et al. [9] leveraged a time series forecasting model to predict future similarity scores between nodes based on their past similarity score values. However, these similarity-based features sometimes cannot capture high-quality underlying characteristics of networks, as they ignore the dynamic evolution of the network at the previous moment and contains not ample but segmentary features of the evolving network. The dominant advantage of such methods is the computational efficiency, while the accuracy of those methods is not as high as expected if the links dynamically change over time. In addition to spatial features, there are also methods that learn temporal information of dynamic networks. Some methods [36, 37, 38] are designed to utilize a sequence of previous snapshots to predict future links. They integrate both structural and temporal information to model the dynamic evolution process. For example, Yu et al. [37] proposed a link prediction model with spatial and temporal consistency (LIST) to predict links in a sequence of networks over time. LIST characterizes the network dynamics as a function of time. It integrates the spatial topology of network at each timestamp and the temporal network evolution. Many researchers [16, 17, 39, 40, 41, 42] recently integrated time information into network embedding to make it capable of capturing the dynamic evolution of the network. Goyal et al. [39] proposed DyLink2Vec for the task of link prediction in a dynamic network, which considers the feature learning task as an optimal coding problem and the learning process as a two-step compression-reconstruction step. Zhou et al. [17] proposed a novel representational learning method, DynamicTriad, to preserve both the structural information and evolutionary patterns of a given network, so that the model can capture network dynamics and learn the representation vector for each node at different time steps. Xiao et al. [1] proposed a model based on network embedding, which combines network structure feature and user text feature to predict links. Due to the great success of GNNs in handling graph data, some researchers harness the power of GNNs to handle dynamic graph data [22, 23, 24, 25, 26]. For example, in order to predict both the added and removed links at the same time, Chen et al. [25] proposed a unified model, GC-LSTM, to make full use of GCN to learn network structure in hidden state and cell state, and learn temporal feature of network through LSTM model. Lei et al. introduced a novel model GCN-GAN [26] to tackle the challenging temporal link prediction task, which combines the strengths of the GCN and LSTM in learning the comprehensive distributed representations of networks as well as the generative adversarial network (GAN) in generating high-quality weighted links. One limitation of these methods is that none of them consider time at finer level and do not capture both topological evolution and interactions simultaneously. Recent researches [28, 29] try to capture both topological evolution and interactions simultaneously with a two-time scale deep temporal point process model, and achieve the-state-of-art performance. However, all the GCN-based methods mentioned above primarily focus more on link-based node features but less on graph structures within the neighborhood, especially higher-order structural patterns named motifs.
Network motif.
Network motifs are fundamental building blocks of complex networks [30]. Investigations of such patterns usually lead to the discovery of meaningful connectivity patterns and understanding the dynamic mechanisms of complex systems. Motifs have been used successfully in static network analysis for a wide range of applications such as bioinformatics [43], neuroscience [44], scholar networks [45], and social networks [46, 47]. Multiple works have demonstrated that it is useful to explore the motifs in different graph-based ML tasks [32, 33, 48], such as node classification [49], node ranking [50, 51], community detection [52] and graph classification [53] tasks. Rossi et al. [32] proposed the notion of higher-order network embeddings, and demonstrated that one can learn better embeddings when various motif-based matrix formulations are considered. Paranjape et al. [31] found that temporal motif counts reveal key structural patterns in networks, and networks from different domains tend to exhibit very different organizational structures, whereas networks from the same domain tend to have similar structure. Zhao et al. [50] proposed a novel framework, motif-based PageRank (MPR), to incorporate higher-order structures into conventional PageRank computation. Our work extends but differs from previous approaches [28, 29, 31, 32, 50]. We employ temporal motifs to define the receptive field around a target node of interest both in spatial and temporal dimensions for graph convolution. Specifically, we propose a novel GCN which utilizes temporal motif-based attention for dynamic link prediction.
Preliminaries
Notations
Table 1 lists the mathematical symbols frequently used in model description. Upper-case bold letters denote matrices, lower-case bold letters represent vectors, and non-bold italicized letters for scalars.
Table of notations
Table of notations
The central goal of this work is to predict links in temporal graphs. DyRep [28] assumes that temporal graphs evolve according to two fundamental processes:
These two kinds of processes are realized in the form of sequential events observed between nodes over a temporal window
We use definition of temporal network motifs as defined in [31] and extend it with minor changes.
Some examples of temporal motifs are shown in Fig. 2. The above definition provides a template for any pattern types. A collection of timestamped links in a temporal graph is an instance of
3-link temporal motifs whose links appear in a time order. Note that the link numbers indicate their temporal orders. Adapted from [31].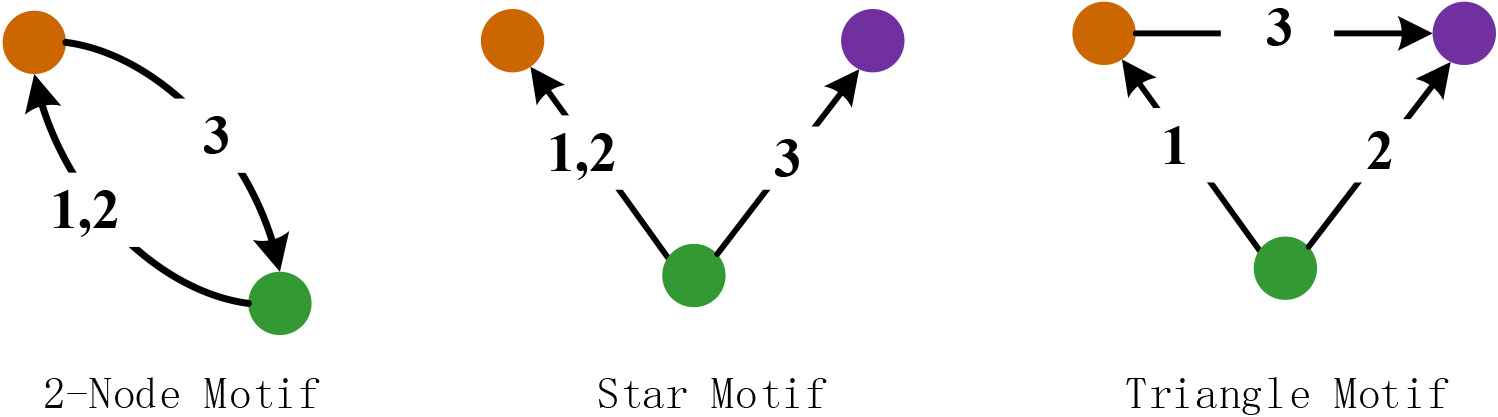
where
(a) is an example 4-node, 8-link temporal graph. (b) is the temporal motif-based adjacency matrix for 3-node, 3-link triangle motif with time window 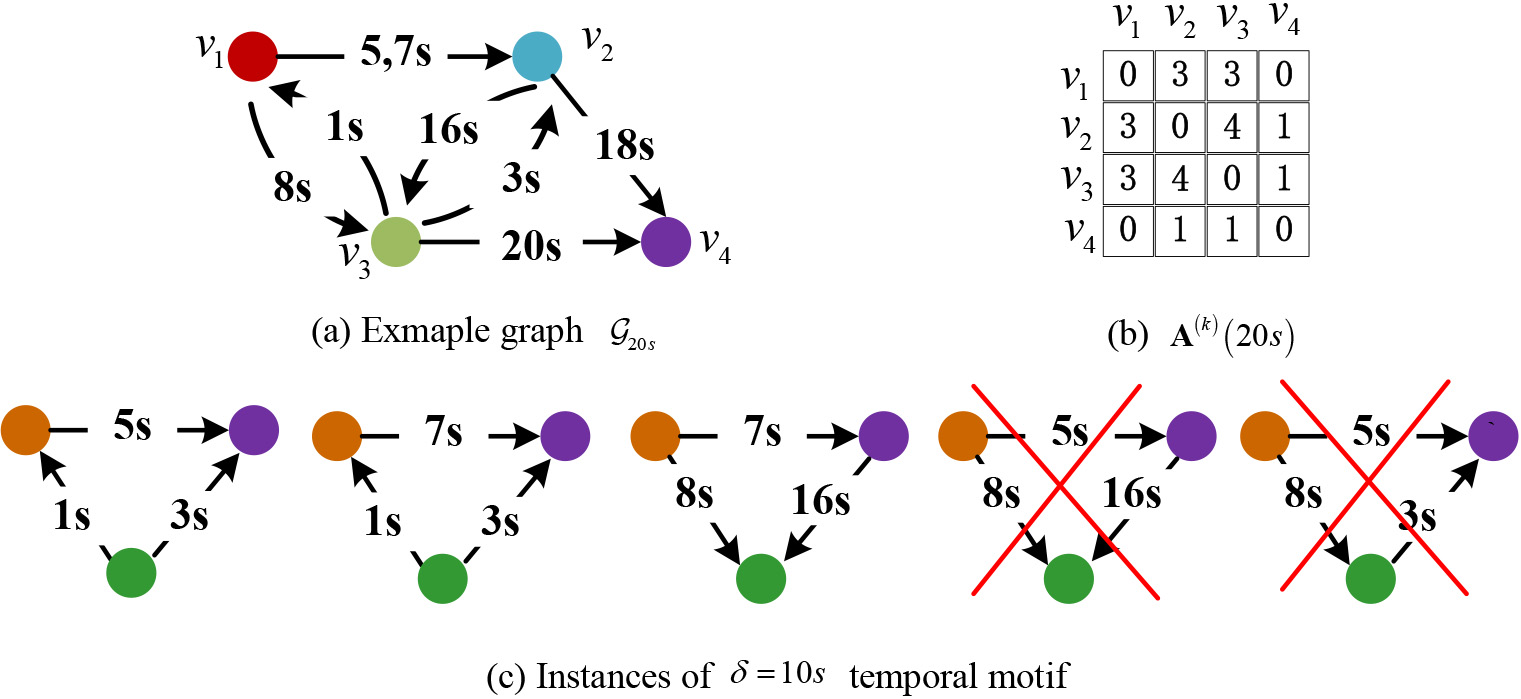
Now, we give an example to illustrate the motif-based adjacency matrix in Fig. 3. Assume we extract a temporal graph
With the above definitions, the problem of dynamic link prediction can be formalized as follows:
In this section, we introduce the design of TMAGCN. First, we overview the architecture of TMAGCN. Second, we introduce a novel algorithm to construct temporal motif-based adjacency matrix. Third, we introduce temporal motif-based attentional graph convolutional networks. Forth, we explain the latent mediation process for dynamic link prediction. Finally, we detail the training process of TMAGCN.
The framework of TMAGCN.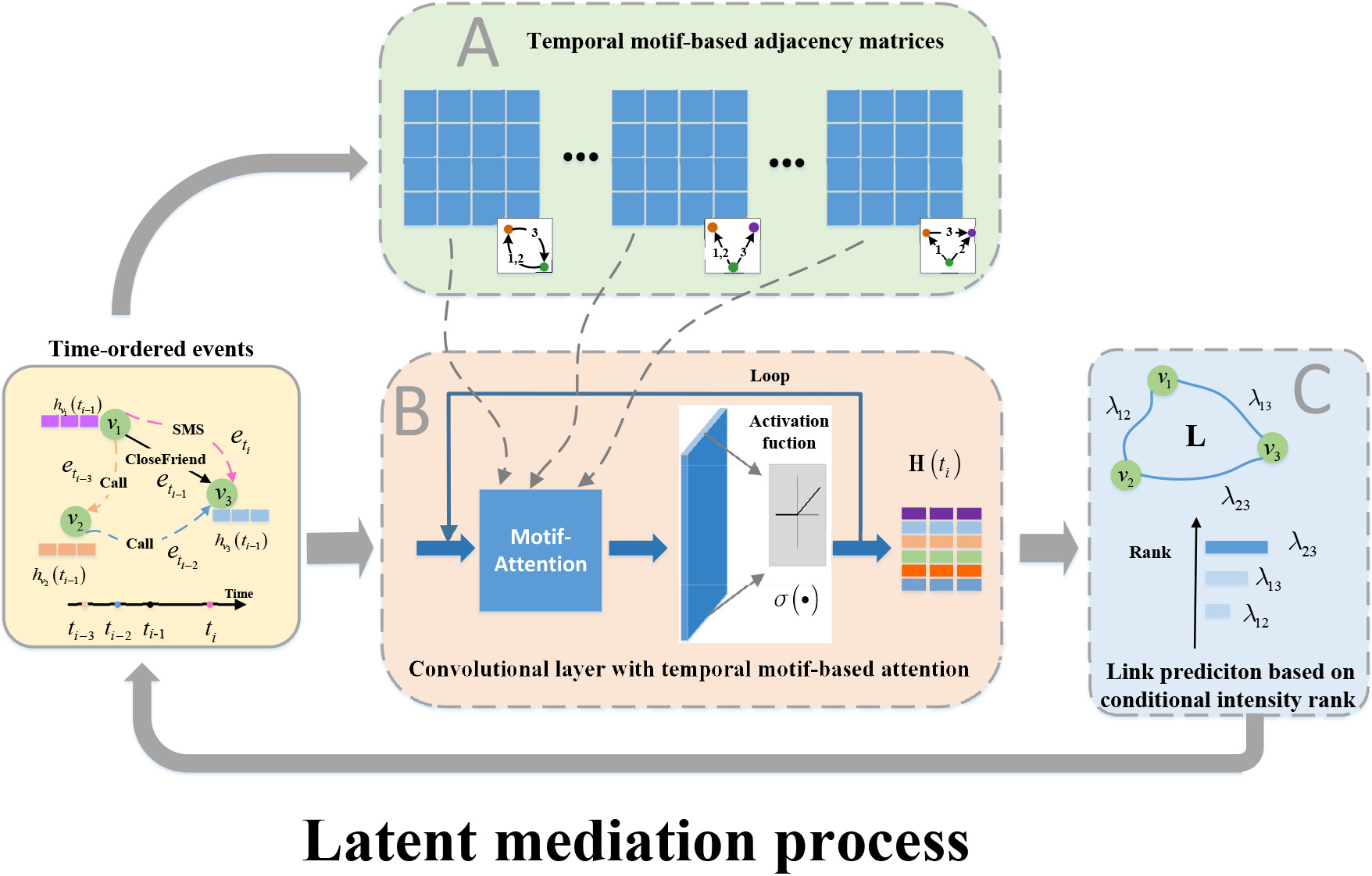
As shown in Fig. 4, TMAGCN consists of a temporal motif-based adjacency matrix constructing module (
The above three modules operate in the workflow of latent mediation process for dynamic link prediction.
Temporal motif-based adjacency matrix construction
Paranjape et al. [31] proposed a general framework for exactly counting the number of instances of all possible
[!h] : Temporal motif-based adjacency matrix construction.[1] Sequence
The key idea in mapping a sequence of temporal links
Algorithm 4.2 outlines the temporal motif-based adjacency matrix construction method. With respect to the original algorithm in [31], the highlighted codes in Algorithm 4.2 denote the changes for recording link list of motif. Line 1 includes all the necessary data initialization. The time serial numbers start from 0. The motif counter is set 0. The set linksrecord [
Temporal motif-based graph convolutional networks
Convolutional layer with single temporal motif-based attention
The original graph convolutional network (GCN) [27] aims to fuse a node’s information with its neighbors’ information to handle spatial dependencies in a graph. When the adjacency matrix
where
where
Based on the attentional mechanism of graph attention network (GAT) [56], we propose a variant of GAT to modify Eq. (4) with attention coefficient
where
GAT employs the multi-head attention to stabilize the attention coefficients learning process.
We have demonstrated how to integrate higher-order temporal and structural information into node embeddings based on a single temporal motif-based attention. Given
Inspired by recent advances in attention mechanism, we propose a motif-attention model to dynamically weight the importances of different motifs for each node. We use the scaled dot-product form to compute the node
where
Furthermore, we propose a reinforcement learning strategy to allow each node to select its most relevant neighborhood to integrate information. We define one function
where
where
In Section 3.2, we have formally stated that most real-world dynamic networks contain two interleaved processes in the form of communication and association events, and can be modeled as temporal graph
The interaction of these two processes can be expressed as three recursively executed functions:
where
Embeddings
where
where
where
Given the mini-batch size
where
While
where
Datasets
In order to evaluate the performance of our proposed method, we use three real-world social networks: European Email Network (Email-EU) [13], Social Evolution Network (SocialEvl) [58] and Github Network (Github) [28]. Details of these datasets are introduced below.
Email-EU.
The network was generated using email data from a large European research institution. The e-mails only represent communication between institution members, and the dataset does not contain incoming messages from or outgoing messages to the rest of the world. A directed link
SocialEvl.
This dataset is released by MIT Human Dynamic Lab. It was generated using everyday online social network data from an undergraduate dormitory. This dataset consists of 84 students, 426,332 communication events in 3 types and 10,548 association events in 5 types. Individual attributes and relationships were captured by phone sensors. A communication event is represented by the sending of an SMS message, or a PROXIMITY or CALL event from person
Github.
This dataset consists of 284 users and 7333 communication events in 7 types and 730 association events in 1 type. A communication event is represented by committing a ForkEvent, PushEvent, WatchEvent, IssuesEvent, IssueCommentEvent, PullRequestEvent, or a CommitCommentEvent from user to user. An association event is represented by the fact that a user committed a FollowEvent with another user. We use events from January 1, 2013 to May 31, 2013 for training, and from June 1, 2013 to June 31, 2013 for testing which gives 5 days of events per time slot. This leads to an approximate 75/25 (train/test) split.
Summary statistics of temporal network datasets
Summary statistics of temporal network datasets
In Table 2, we summarize statistics of benchmark datasets. Cc denotes the clustering coefficient of networks, Cr denotes the correlation coefficient between train and test events. Graph dynamics in the first dataset belong to a single-time scale process and all the events are represented as
We apply a two-layer GCN model to update node embeddings. Then, we use the rectified linear units (ReLU) as the nonlinear activation function in graph convolution layers, and exponential linear unit (ELU) to compute the attention weights in GAT model. GCN model is initialized using He [59] initialization while GAT model is initialized using Glorot [60] initialization. We construct temporal motif adjacency matrix based on the 3-link temporal network motifs as defined in [31]. We optimize all models by minimizing the cost function with the Adam optimizer [61], an initial learning rate of 0.0002, decay step of 10, decay weight of 0.5, minibatch size of 200, and 64 hidden units per layer. The number of attention heads in GAT model is 8. We adopt an
For SocialEvl dataset, we generate the one-hot node embedding as the initial hidden representation based on the information about which year the subjects were in, and which living sector in the dorm building the subjects’ apartments were located in. This is for the reason that living sector in the dormitory and year in school are the two major factors in determining relationships in the dataset. For the other two datasets, we utilize motif counts distribution to generate the initial node embeddings, which are then updated during training.
During testing, given a tuple
We divide the test sets into
Results
To evaluate the superiority of our proposed TMAGCN, we conduct extensive experiments on dynamic link prediction tasks and compare TMAGCN against state-of-the-art evolving embeddings methods DyRep [28] (representation learning framework for dynamic graphs) and LDG [29] (latent dynamic graph) on 3 real world dynamic networks. Specifically, the compared baselines are as follows:
In this paper, the dynamic link prediction task is to predict future events between nodes. We summarize the overall MAR and HITS@10 and standard deviations of different methods on the three dynamic network datasets in Table 3. For TMAGCN based methods, we choose
TMAGCN achieves high HITS@10 and low standard variances for all datasets, which demonstrates its robustness in accurate learning from various properties of data. Specifically, TMAGCN based methods consistently improve results, achieving gains of 7.6%, 7.8% and 5.6% in HITS@10 while rising 6.7, 3.9 and 14.55 places in MAR over LDG based models on Email-EU, SocialEvl and Github datasets, respectively. Even though only the temporal motif-based adjacency matrix is utilized, TMAGCN TMAGCN DyRep achieves the relatively lowest evaluation values, but it provides the cornerstone and inspiration for LDG and TMAGCN in modeling two-time scale dynamics. The results on one-time scaled dynamic graph of Email-EU dataset further confirm the finding from [29] that the bilinear transformation is superior to feature concatenation.
Results of dynamic link prediction in terms of MAR and HITS@10 metrics
For SocialEvl dataset, there are three types of communication events: SMS, PROXIMITY and CALL. For Github dataset, there are seven types of communication events: ForkEvent (FE), PushEvent (PE), WatchEvent (WE), IssuesEvent (IE), IssueCommentEvent (ICE), PullRequestEvent (PRE) and CommitCommentEvent (CCE). In order to show the necessity of the attentional graph convolutional structure, we further illustrate the dynamic link prediction results of every specific type of communication events in Fig. 5. The series of TMAGCN methods based on the framework of GAT model almost consistently improve results. They increase HIST@10 values and decrease MAR values over DyRep and LDG based models on every specific type of communication event.
Dynamic link prediction performance of every type of communication events in terms of HITS@10 and MAR on SocialEvl and Github datasets.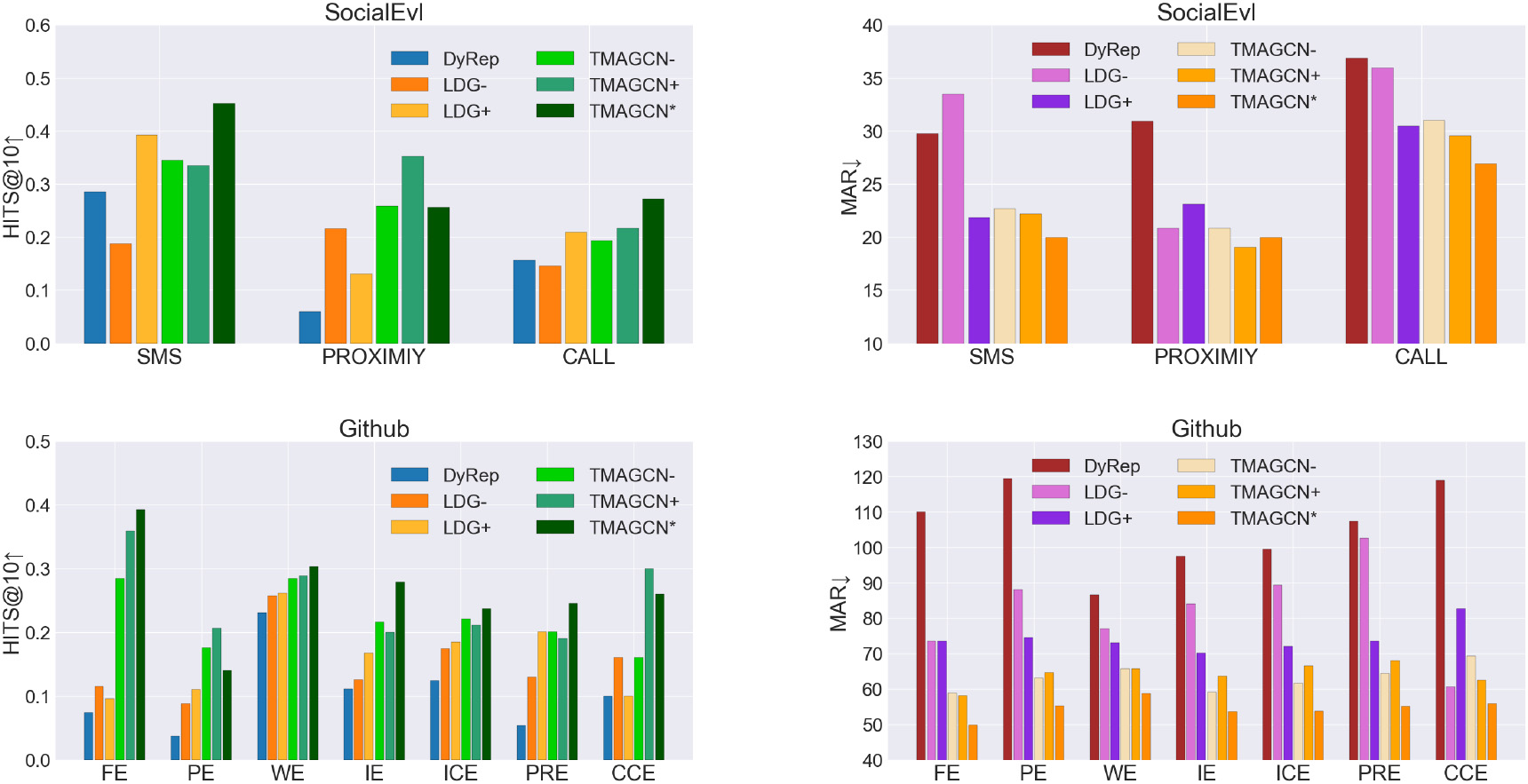
In Fig. 6, we take the SocialEvl dataset as an example to plot the dynamic link prediction performances of all methods in terms of HITS@10, and we explore the change of performance over time. Figure 6 shows our method outperforms all the baselines in every slot. The performances of all methods drop over time due to the temporal recency effects on node’s evolution. DyRep and LDG can capture event dynamics well in the first two slots but their performances deteriorate significantly in HITS@10 metric over time. Comparatively, the performances of TMAGCN based methods drop a little over time for all slots and can consistently maintain at a relatively higher level. It demonstrates that features learned through link-level modeling limit the predictive capacity over time, while features learned through temporal motif-level modeling can alleviate the problem to some extent.
Dynamic link prediction performance in terms of HITS@10 in different time slots on the SocialEvl dataset.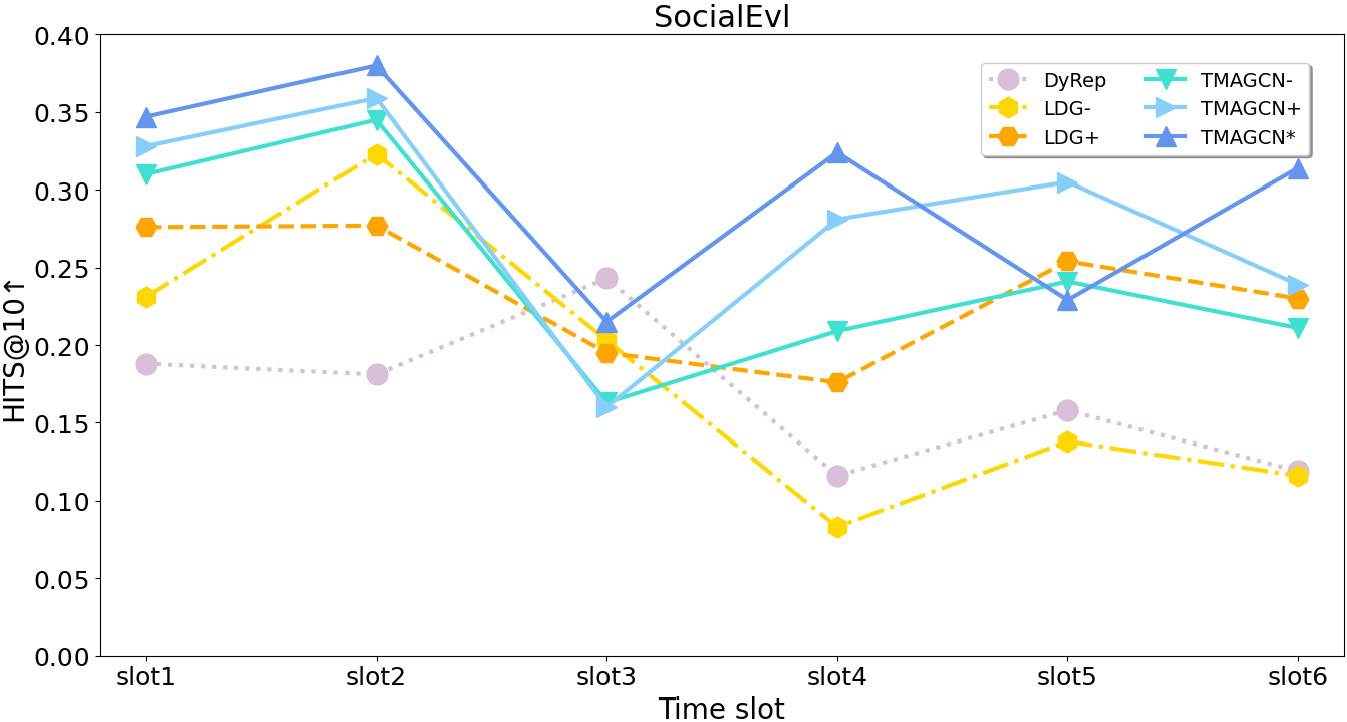
Noting that the temporal motif-induced adjacency matrix plays an important role in the representation learning, and the time window
We first plot the distribution of temporal motif instance counts for
Then we plot the performance of TMAGCN* for the four different time windows in Fig. 8. We analyze these results in Fig. 8 based on the empirical observations in Fig. 7 uniquely available due to temporal motifs (compared to separate links). Prevalence of non-blocking motif
Qualitative performance
In this section, we conduct qualitative experiments through a visualization using t-SNE (T-Distribution Stochastic Neighbour Embedding) [62], which extracts transformed feature representations on the SocialEvl dataset, to investigate the discriminative quality of evolving embeddings learned by TMAGCN. In a static graph, a good network visualization usually implies that nodes similar in terms of network
Counts of temporal motif instances in four time intervals for the Email-EU and Github datasets. The color for the count of motif 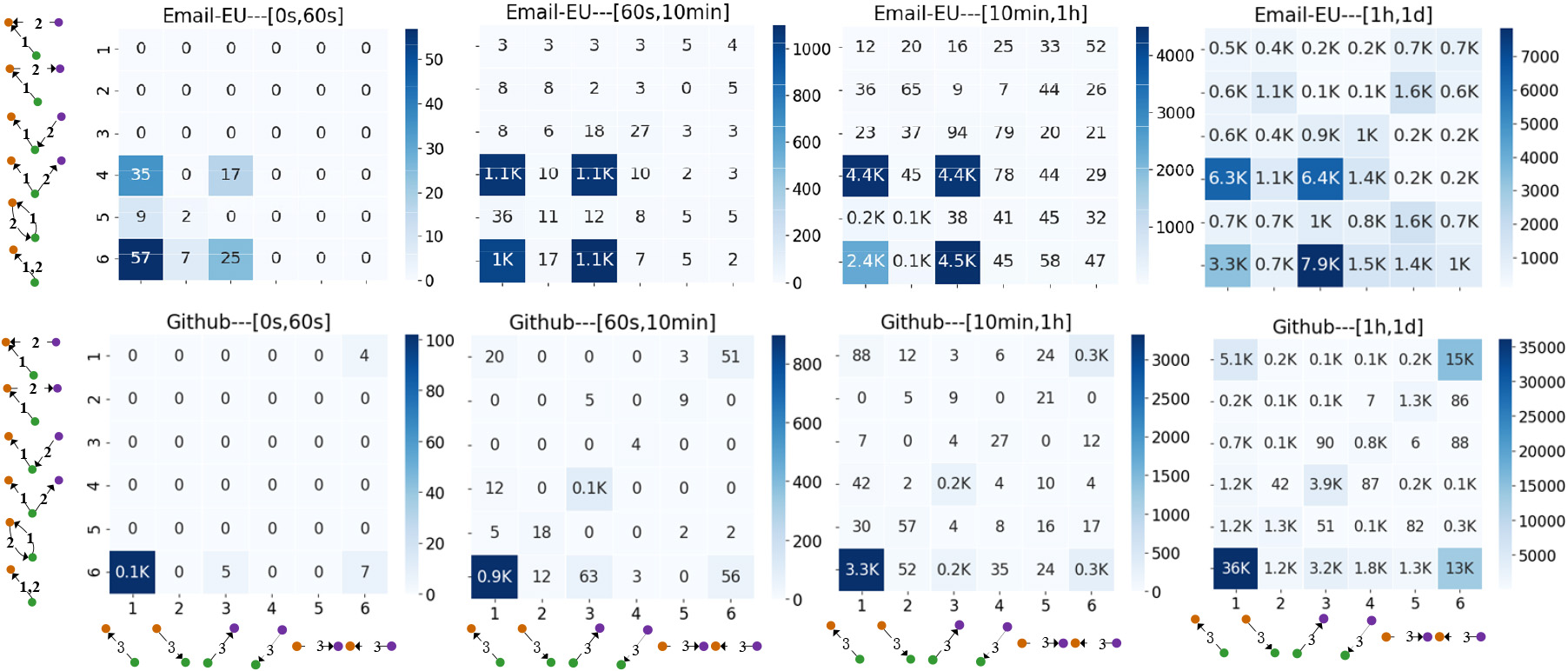
Dynamic link prediction performance in terms of HITS@10 in different time slots on Email-EU and Github datasets.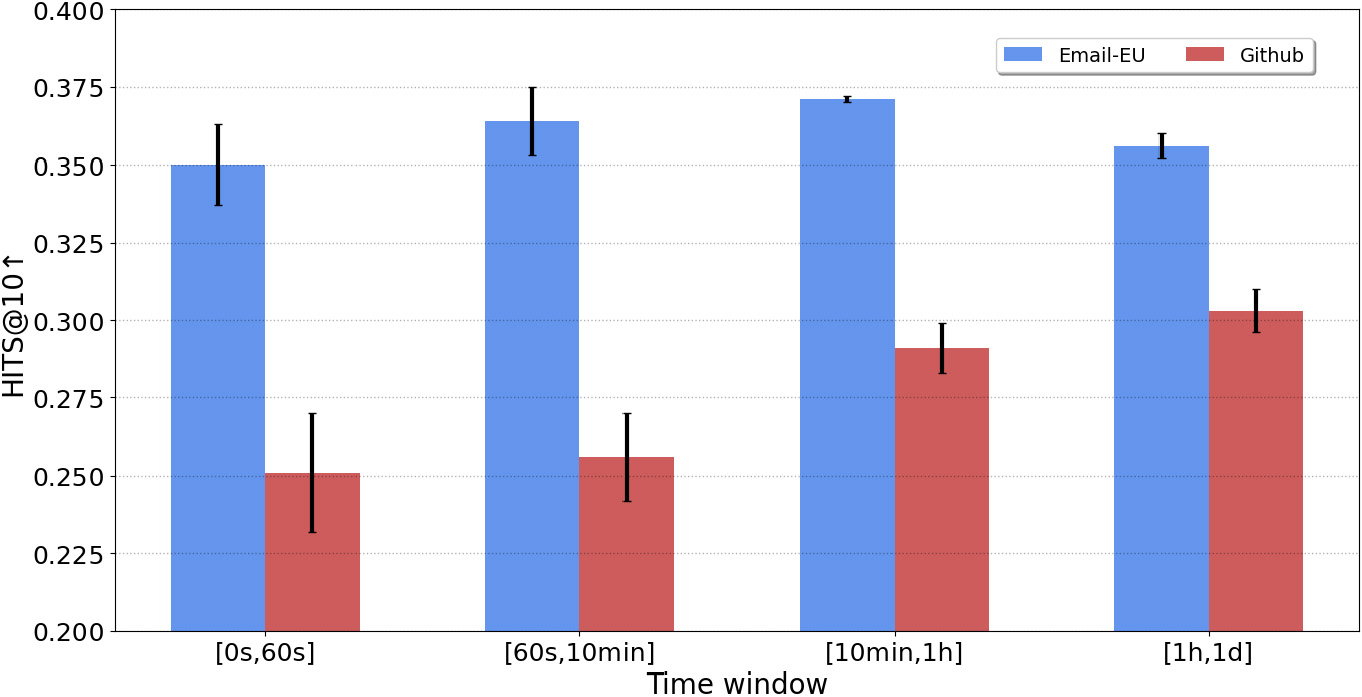
topology tend to be visualized close to each other. In a dynamic graph, frequently communicating nodes generally reside closer to each other after training step.
We consider three use cases to demonstrate how the interactions and associations between the nodes change their representations and visualize them to realize the effect. The first use case is the pair of nodes 10 and 15 that have established 2 association events (1 SocializeTwicePerWeek and 1 PoliticalDiscussant), 137 communication events (6 SMS and 131 CALL) in training period and 1 association events (1 PoliticalDiscussant), 34 communication events (34 CALL) in testing period. The second use case is the pair of nodes 43 and 63 that have established 2 association events (1 FacebookAllTaggedPhotos and 1 BlogLivejournalTwitter), 892 communication events (889 Proximity and 3 CALL) in training period and 2 association events (1 FacebookAllTaggedPhotos and 1 BlogLivejournalTwitter), 220 communication events (220 Proximity) in testing period. The third use case is the pair of node 43 and node 10 that have established 2 association events (1 FacebookAllTaggedPhotos and 1 BlogLivejournalTwitter) in training period and 2 association events (1 FacebookAllTaggedPhotos and 1 BlogLivejournalTwitter) in testing period.
Counts of temporal motif instances of the pair of node 10 and node 15, the pair of node 43 and node 63, and the pair of node 10 and node 43.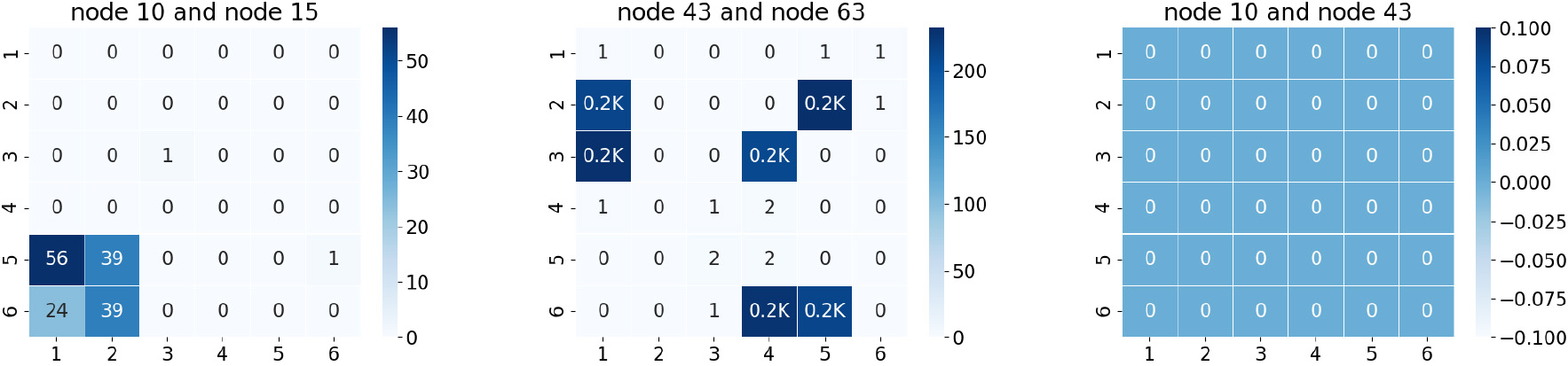
Figure 9 shows the counts of temporal motif instances the three pairs of nodes have participated in. Our proposed algorithm 1 finds that node 15 and node 10 have participated in
Figure 10 shows the visualization of evolving embeddings. Different from exploratory analysis in [28], we put the three use cases in the same subplot figure to provide an explicit comparison. Solid lines denote the sampled pairs of nodes. Green hexagons correspond to the sampled frequently communicating pair of nodes with a close relationship. Inverted red triangles correspond to the sampled frequently communicating pair of nodes with a non-intimate relationship. For every subplot figure, we calculate the cosine distances and cosine similarities of node 10 and node 15, node 43 and node 63, and node 10 and node 43.
From the figure, we have the following observations:
For the first use case: after training, all the four comparing methods DyRep, LDG For the second use case: during training period, node 43 resides far from node 63. After training, in DyRep, the cosine similarity of node 43 and node 63 is very high – 0.998, almost equal to the cosine similarity of node 10 and node 15. DyRep tends to consider that node 43 and node 63 have a close relationship based on the large number of communication events between the two nodes. However, the fractions of counts corresponding to the blocking and non-blocking motifs out of the counts for all 36 motifs in Fig. 9 uncover that blocking communication events between node 10 and node 15 are vastly more common, while non-blocking communication events between node 43 and node 63 are prevalent. Our proposed TMAGCN For the third use case, node 43 resides close to node 10 in training period but belong to different clusters in testing period since these two nodes share very limited interactions. After training, DyRep and LDG
These observations demonstrate that TMAGCN can leverage higher-order structural and temporal features to capture communication events effectively and correctly. These advantages cannot be obtained by exploring separate temporal links.
t-SNE node embeddings on SocialEvl dataset from training period to testing period.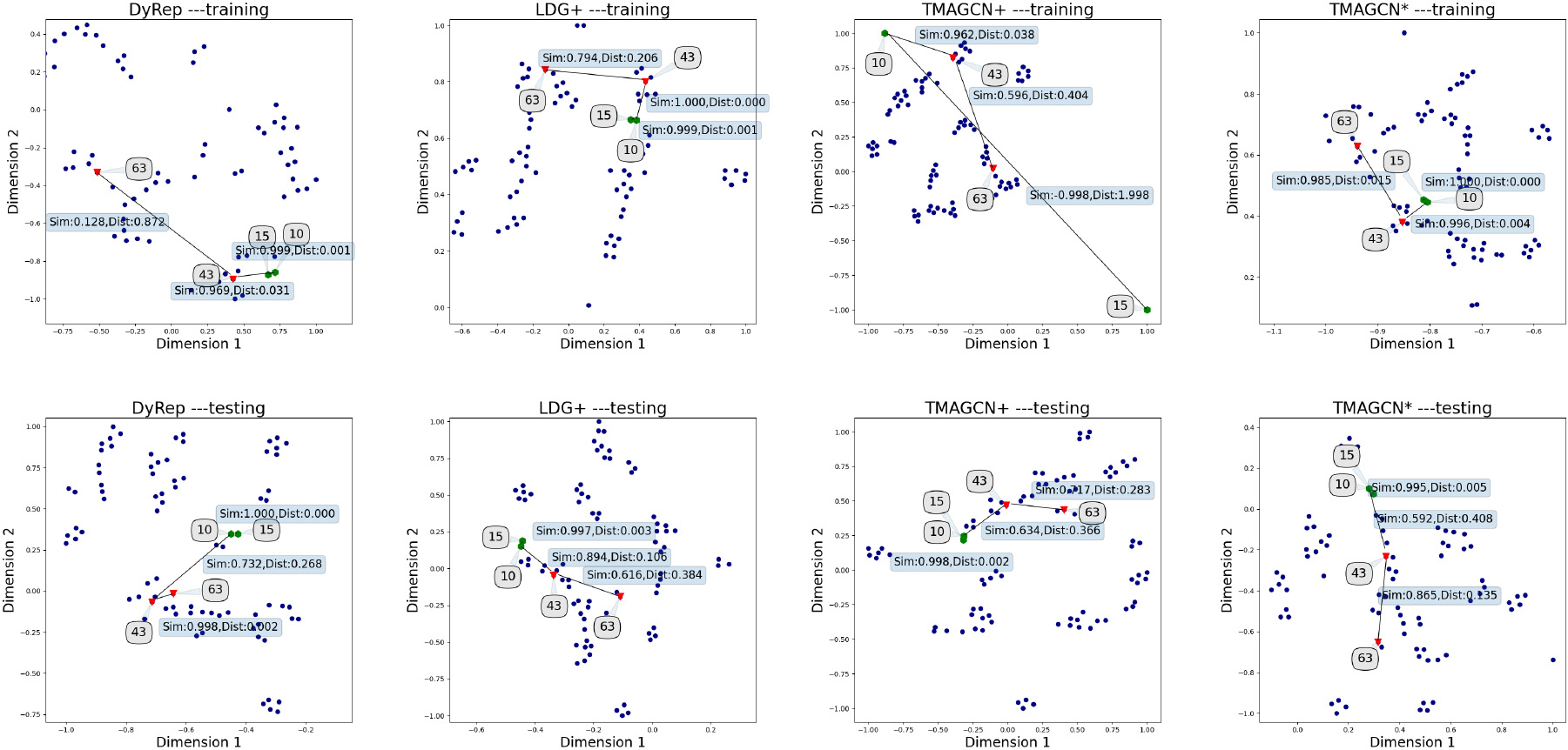
Plots of training loss w.r.t. iteration for dynamic link prediction methods on Email-EU dataset.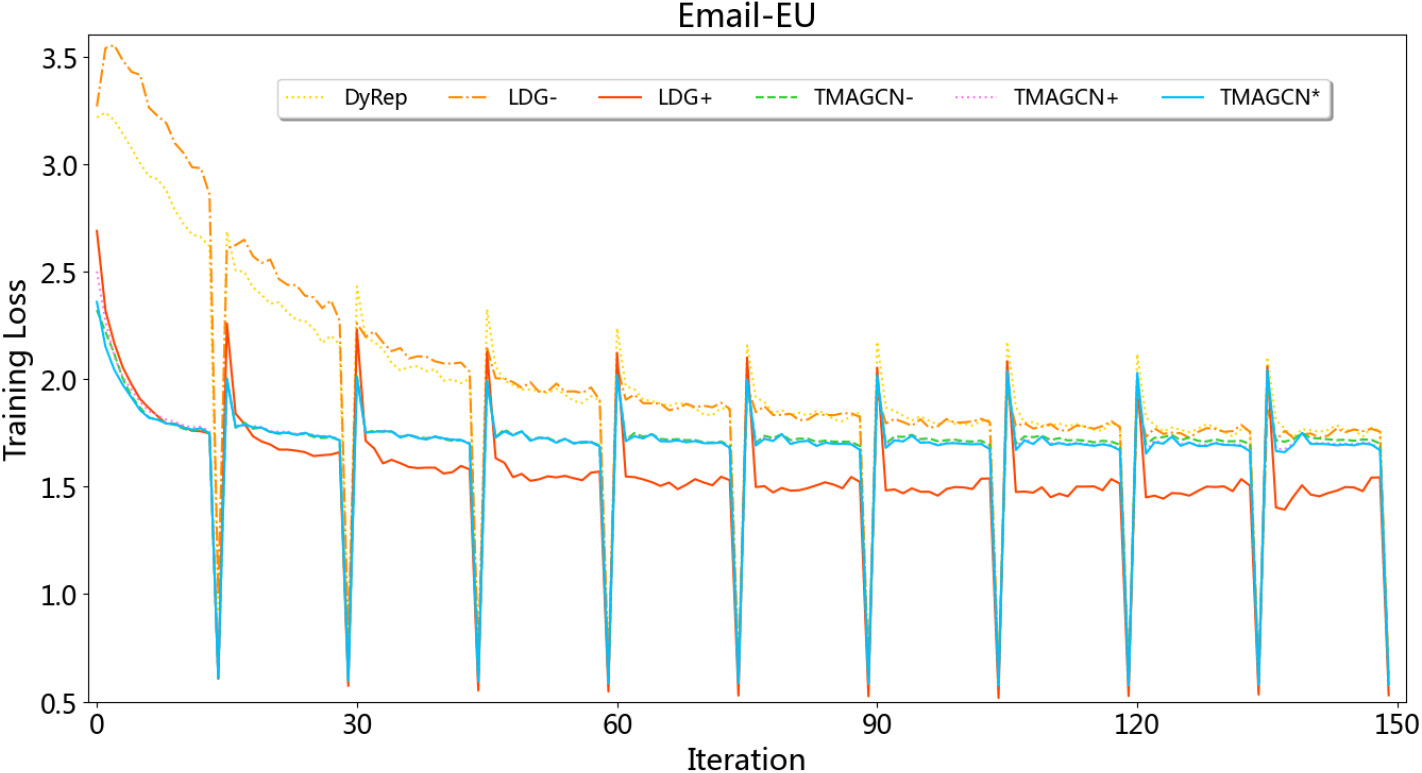
Comparison of (a) Number of training parameters and (b) Time per epoch on Email-EU dataset.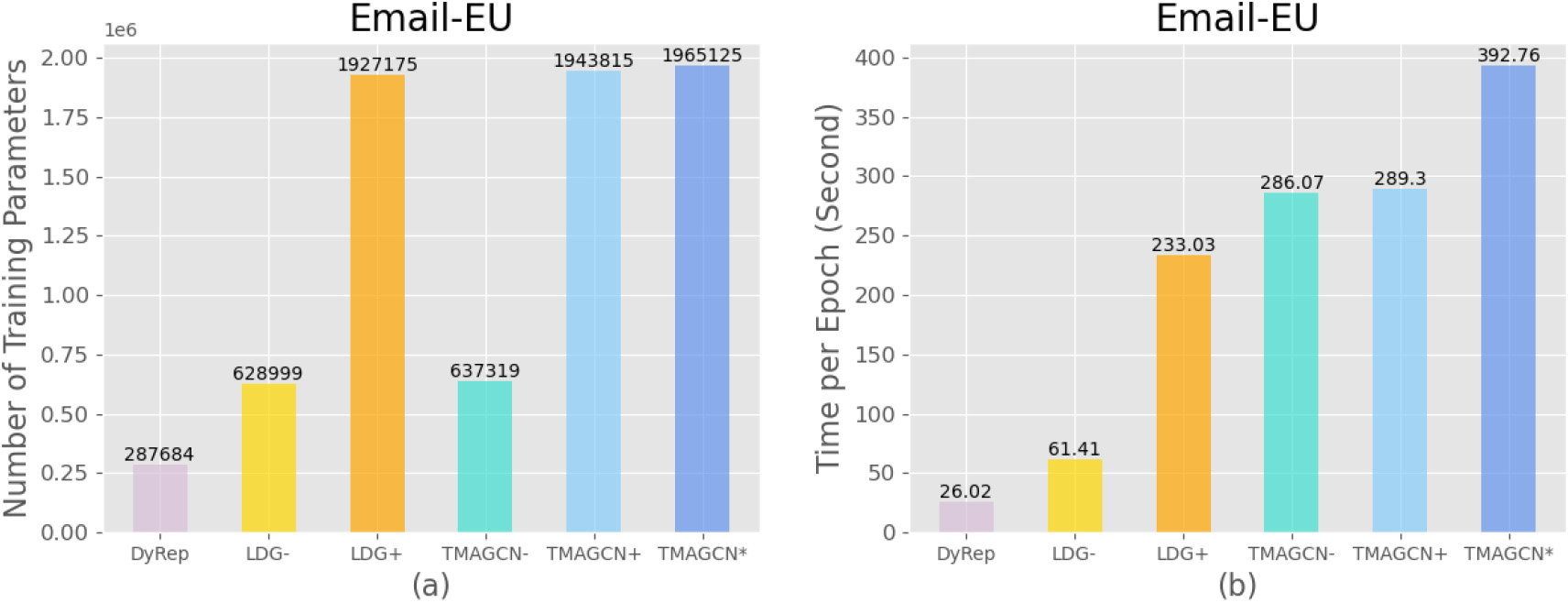
We take Email-EU dataset as an example to plot the loss curves of different methods. We compare the convergence rates of different methods by depicting the training loss curves using the same model configuration and hyper-parameters. The training process is illustrated in Fig. 11. The peak and trough of loss curves correspond to the first batch and last batch of data in each epoch. It is meaningful to focus on the downtrends and smoothness instead of absolute values of loss curves. Overall, TMAGCN based methods achieve faster convergence in comparison to baselines since it leverages multiple relevant graph patterns simultaneously.
We report running times on an AMD EPYC 7742 64-Core Processor system with 256 GB memory. We compare the numbers of training parameters and time costs per epoch of TMAGCN based methods with the compared baselines on Email-EU dataset in Fig. 12. We find that DyRep has the minimum number of training parameters and spends the least time per epoch at the cost of worse link prediction performance. TMAGCN
In this work, we proposed a novel model TMAGCN for the task of dynamic link prediction. This work is as the first model that bridges the gap between the power of GCN and temporal motif in dynamic link prediction study. In order to model complex and nonlinear dynamics of evolving graph, we first extracted higher-order structural and temporal features by the temporal motif-based adjacency matrix construction algorithm. Then motivated by the attention mechanism, we adopted the attentional GCN to encode higher-order structural and temporal features into node embeddings. We designed a dynamic attention-based method and a reinforcement learning-based method to combine multiple temporal motif-based attentions. These two methods allow each individual node to make the most of the relevant motif-based neighborhood to propagate and aggregate information in the graph convolutional layers for updating node embeddings. Finally, we predicted future links through the latent mediation process. The experimental results on several real-world temporal networks demonstrate the advantages of the proposed model over state-of-the-art baselines.
The proposed model supports data mining and analysis on a wide range of temporal networks. It have many potential applications such as user behavior modeling for recommender systems and fraud discovery in telecommunication networks. Our future work will involve the extension of three-link temporal motif to more complex temporal motif containing more nodes and links. The multilayer temporal motif will also be explored to provide fine-grained insights on graph evolution by adding labels to each link denoting the type of relationship, e.g., private or public.
Footnotes
Acknowledgments
This research is supported by the National Natural Science Foundation for Young Scholars (No. 62002384), the China Postdoctoral Science Foundation (No. 2020M683760), and the Collaborative Innovation Program of Zhengzhou (No. 162/32410218).