
Abstract
In order to develop long-lifetime neural electrodes, the insertion tissue injury caused by two optimized neural electrode (convex streamline electrode and vibration attenuation electrode) models were evaluated compared with a reference electrode. Based on the experimental evaluation system for testing tissue injury, the effects of insertion speeds on tissue injury of the two optimized electrodes with different insertion depths were studied. The maximum tissue strain caused by the two optimized neural electrodes firstly increased and then decreased with the increase of insertion speed at the depths of 3 mm and 4.5 mm. The insertion forces caused by vibration attenuation electrode are steady with the change of insertion speed. The convex streamline neural electrode caused less tissue injury compared with the other two electrodes. The higher or lower insertion speed causes smaller tissue strain for the two optimized electrodes, which is conductive to set implantation parameters to minimize tissue injury.
Introduction
Neural recording and stimulation in the central nervous system provide potential for both experimental research and therapeutic practice, which is based on the rapid development of neural electrode [1–3]. Neural electrodes are the key component of the neural recording and timulating system [2]. And the most important functional region of the electrodes is the interface in contact with the brain tissue [4]. However, the application of neural electrode is faced with the technical problem of poor long-term stability and short service life. The acute tissue injury during implantation and the long-term micro-motion induced injury of the brain tissue would cause immune response which result in an encapsulating scar at the electrode-tissue interface, and eventually lead to the weakening of the intensity of neural signal [5–7]. Studies have found that the insertion injury of brain tissue is one of the critical factors leading to tissue encapsulation and the failure of the electrode [7,8].
To improve the long-term effectiveness of neural electrode, many researches try to optimize the structure of neural electrode [9,10]. In this work, two kinds of optimal-designed neural electrodes were evaluated and compared with the reference electrode: the electrodes with convex streamline [11] and electrodes with the capability of vibration attenuation [12], which were designed in our previous work. The electrode with convex streamline was designed to decrease the acute tissue injury during implantation by changing the tip shape of the neural electrode [11]. The vibration attenuation electrode was designed based on the compliant mechanism [13], according to the numerical simulation results, which can reduce the micro-motion induced injury of brain tissue [12]. However, it has not been verified whether the vibration attenuation electrode can reduce the insertion injury effectively.
Referring to the research results of Bjornesson [14] and Welkenhuysen [15], the insertion speed was an important parameter affecting the tissue injury caused by implantation. Moreover, the neural electrodes are widely used in treatment of different diseases, so the insertion depths in human brain are all different. The insertion depth was based on the position of functional nuclei which is different in grey and white matter [16]. Thus, the insertion depth is also an important factor to be investigated.
Several researchers have conducted some studies to evaluate the injury of brain tissue [17–19]. In the study of biomechanics, there are two main research methods [20]: numerical simulation and animal experiment. However, the numerical models for simulating the implantation process require much more complex definitions, and the results of numerical simulation methods usually lack experimental validation. And the animal experiment tends to be affected by multiple biological factors which may lead to tissue distortion [14]. Moreover, with the disadvantages of poor repeatability and comparability, it is not easy to obtain repeatable measurement results and design criteria of the electrode, which is far from enough for the optimization of the electrode design. Therefore, an evaluation system which is repeatable, objective, near to reality and easy to operate is needed to test the insertion injury of the brain tissue.
In order to develop long-lifetime neural electrodes, the insertion tissue injury caused by two optimized neural electrode (convex streamline electrode and vibration attenuation electrode) models were evaluated compared with a reference electrode based on simulated implantation system.
Materials and methods
Experiment materials
The model electrodes used in this work are shown in Fig. 1. As shown in Fig. 1(a), the electrode A1×16-3 mm-50-177 (NeuroNexus Technologies, Ann Arbor, MI) model was set as a reference electrode because of its widespread use for both chronic and acute recording, and based on which, two optimal electrodes were designed. The optimal electrodes which were designed in our previous study are shown in Fig. 1(b) and (c). Figure 1(b) shows the tip of the neural electrode, which was optimized into convex streamline [11]. The vibration attenuation electrode model is illustrated in Fig. 1(c), which was designed based on lumped compliance compliant mechanism using four flexible hinges [12].
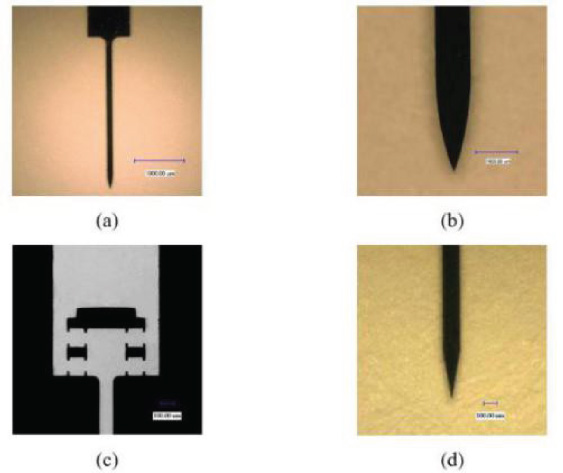
The electrode models: (a) The electrode A1×16-3 mm-50-177 model. (b) The electrode model with convex streamline. (c) The vibration attenuation electrode model. (d) The tip of the reference electrode.
The optimal electrode was fabricated using photolithography and dry etching process by AEMD (Center for Advanced Electronic Materials and Devices, Shanghai Jiao Tong University), which was without any internal circuit. The neural electrodes used in the comparative experiments are shown in Fig. 2. Figure 2(a) and (b) show the electrode with convex streamline. Figure 2(c) shows the electrode with lumped compliance compliant mechanism. And Fig. 1(d) shows the tip of the reference electrode (wedge angle 20°).
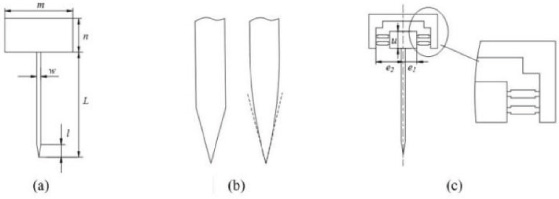
Geometry parameters of silicon electrode.
According to our earlier study [11], the brain tissue could be simulated using silicon rubber, which is reasonable to get expected results. Series of experiments have been done to verify the mechanical property of the brain tissue model [11,21]. In detail, it was made of silicone rubber (Ecoflex-0010, Smooth-on, Inc.) mixed with a proportion (20%) of the softener (Slacker, Smooth-on, Inc.). Also, the optimal speckle (Fig. 3(a), ×200 image taken by the digital microscope) can be fabricated with the following parameters: silicone rubber component A: silicone rubber component B: softener: graphite = 5 ml: 5 ml: 2 ml: 0.6 g, spinning rate: 1000 r/min (KW-4A, Institute of Microelectronics of Chinese Academy of Sciences). Figure 3(b) shows the grey-scale map for average gray level gradient calculation to test the quality of the speckle pattern. The speckle pattern was verified to be high-quality with the mean intensity gradient (MIG) parameters [22].
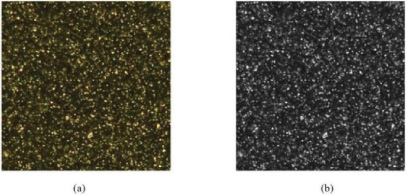
Speckle pattern of the surface of biological tissue phantom. (a) The optimal speckle pattern. (b) The grey-scale map to test the quality of the speckle pattern.
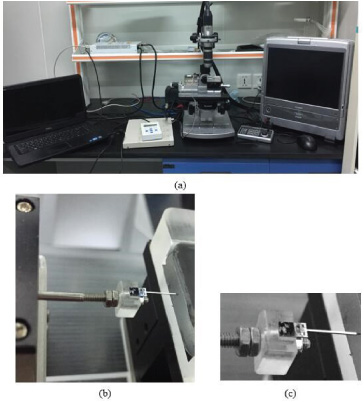
The evaluation system for testing tissue injury [11] was set up as shown in Fig. 4(a). The system is composed of three modules: (a) load module for simulating neural electrode implantation process, including stage controller (CHUO SEIKI, QTCM2), X-axis step motor driven micro platform (ALS-602-H1M), NMB force sensor (UT-100GR, 980.7 mN), and Z-axis micro platform; (b) data acquisition module, including digital microscope (KEYENCE VHX-500) used to capture micrographs of speckle pattern on the tissue surface. (c) Post processing module, including personal computer and Vic-2d software for extracting tissue deformation information from the captured speckle patterns.
As shown in Fig. 4(b), the silicon electrode was attached to the tip of the force sensor by the medical adhesive (Loctite 4861). The force sensor was fixed to the X-axis micro platform so that it can drive the electrode with different displacement or speed. Brain tissue phantom was placed in a container fixed onto the Z-axis micro platform to adjust tissue’s height and make sure the tissue aligns with the electrode. The phantom can be freely moved in the Y-axis direction for insurance that each insertion point is new.
Evaluation system of electrode insertion induced injury.
The implantation site of the neural electrode was cerebral cortex which was composed of gray matter and white matter. And the thickness of gray matter varied from 2.5 mm to 3 mm. The white matter is under the gray matter. So, 1.5 mm, 3 mm and 4.5 mm were set as the insertion depth to ensure that the electrodes can be inserted into cerebral cortex or cerebral medullary substance. 50 μm/s, 100 μm/s, 500 μm/s, 1000 μm/s, 1500 μm/s, 2000 μm/s were set as the speed parameter.
The maximum tissue strain
The maximum tissue strain and tissue deformation are common parameters for evaluating biological tissue damage [2]. The maximum tissue strain in this study was calculated with VIC-2d based on digital image correlation method [24].
As shown in Fig. 5(a) and (b), the displacement and strain are axisymmetric along the electrode. The strain is concentrated at the tip of the electrode. The pattern of the displacement fields and strain fields were similar.

(a) Deformation fields of tissue phantom. (b) Strain fields of tissue phantom.
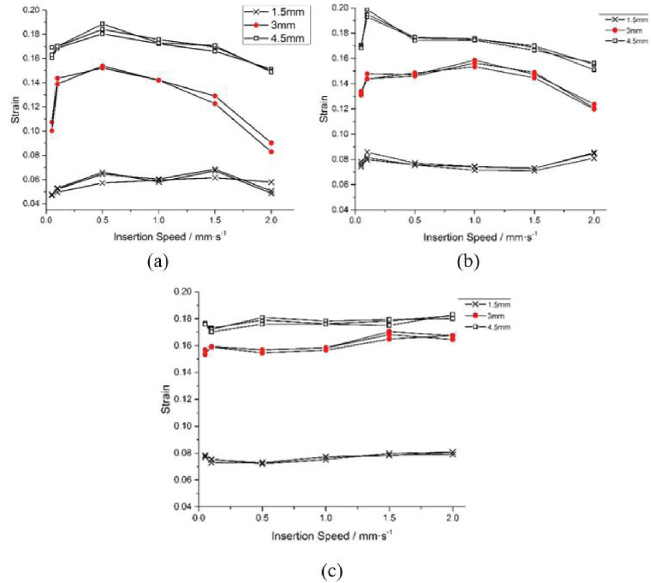
The maximum strain with different insertion speed and depth of three kinds of neural electrodes. (a) Neural electrode with convex streamline. (b) Neural electrode with capability of vibration attenuation. (c) Reference electrode.
Figure 6(a) shows the curves of electrode with convex streamline. The curve of the insertion depths of 3 mm and 4.5 mm was similar, as the strain value firstly increased and then declined with the increase of the insertion speed. Figure 6(b) shows the curves of neural electrode with the capability of micro-motion attenuation. While the insertion depths are 3 mm and 4.5 mm, the maximum strain increased and then decreased with the increase of insertion speed. And the peak value occurred at disparate insertion speed. Figure 6(c) shows the graph of reference electrode. The curves of three insertion depths were all stable. Comparing the three figures, it can be seen that the convex streamline electrode cause smaller tissue strain than other two electrodes in any insertion depths. If the insertion depth was deeper, the two optimized neural electrodes caused less tissue injury with the increase of insertion speed compared with the reference electrode, while the tissue strain caused by the reference electrode varied little.
The insertion force is another important factor for evaluating the insertion injury of brain tissue [14]. In this study, the insertion force was collected by the NMB (UT-100GR, 980.7 mN) force sensor.
Figure 7 shows the changes of insertion force with time. During the implantation process, the insertion force increased at first. Once the electrodes were fully inserted into the brain, there was a decline in the compression force over time. And then the compression force kept at a constant value.
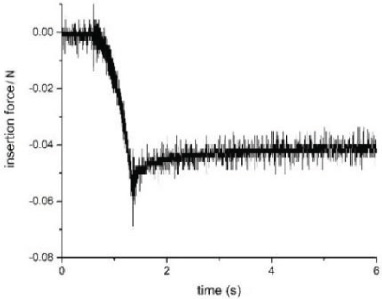
Force-time curves.
The peak insertion forces with various insertion speeds and depths of the model electrodes are illustrated in Fig. 8. For all the neural electrode models, the values of peak force at the depth of 1.5 mm are stable. As shown in Fig. 8(a) and (c), the peak force of the electrode with convex streamline and the reference electrode change a lot with the increase of insertion speed at the depths of 3 mm and even more emphatically at 4.5 mm. The curves of vibration attenuation electrode are shown in Fig. 8(b). There is small variance in insertion force with the change of speed. However, the range of insertion force caused by the reference electrode was larger than the others.
By comparing the three figures, it can be inferred that the peak insertion force caused by convex streamline electrode is smaller than that of the other two at the same condition, which is consistent with the tissue strain. Therefore, the neural electrode with convex streamline was validated to be effective to alleviate the insertion injury in this work.
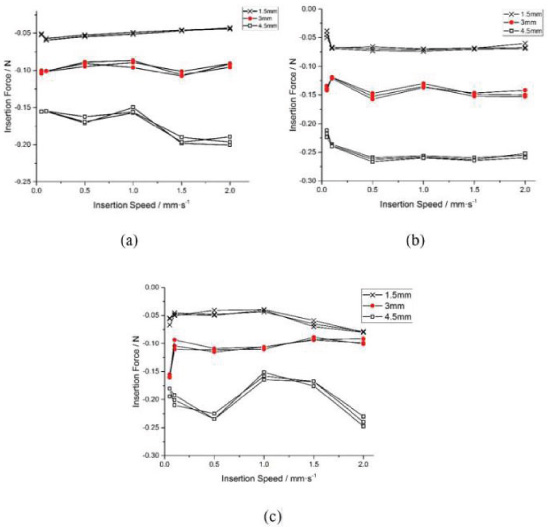
The peak insertion force with various insertion speed and depth of three different kinds of neural electrodes. (a) Neural electrode with convex streamline. (b) Neural electrode with capability of vibration attenuation. (c) Reference electrode.
In this work, comparative experiments were carried out based on the evaluation system for tissue injury simulation. The convex streamline neural electrode caused less tissue injury compared with the other two electrodes. The higher or lower insertion speed causes smaller tissue strain for the two optimized electrodes, which is conductive to set implantation parameters to minimize tissue injury.
Footnotes
Acknowledgements
The authors gratefully acknowledge the financial support from the National Natural Science Foundation of China (Grant No.51675330). The authors would like to thank Instrumental Analysis Center and Advanced Electronic Materials and Devices Center of Shanghai Jiao Tong University for their generous help.