The stability and control of nonlinear time-delay systems of Takagi-Sugeno (T-S) fuzzy model are studied in this paper. The integral inequality of a free weight matrix is chosen to give a less conservative delay-dependent stability criterion in the form of linear matrix inequalities (LMIs). The premise mismatch strategy is applied, it is combined with Finsler lemma, a more flexible design method of fuzzy state feedback controller is proposed. This method does not require the controller and system to share the common premise membership function and the number of rules. The controller design strategy proposed in this paper can effectively solve the control problem of fuzzy systems when the number of state variables is not equal to the number of input variables (), or . Finally, two simulation examples are given to prove the advancement and effectiveness of the proposed theory.
Strict mathematical linear system theory and flexible fuzzy logic theory can be combined into a unified framework. Fuzzy model methods are recognized as a powerful tool to approximate the nonlinear dynamics of complex systems. In particular, since the T-S fuzzy model has been proposed [1], the stability analysis, controller synthesis, and filter design of nonlinear systems have received a great deal of attention. The T-S fuzzy model can represent a complex nonlinear system as a weighted sum of linear subsystems, it facilitates theoretical analysis. Currently, the T-S fuzzy method has become a tool, it can effectively deal with nonlinear systems [2].
Under normal circumstances, time lags are unavoidable in practical systems and engineering problems, such as signal transmission, network control systems, neural networks, and synchronization between chaotic systems [3]. Time lag often leads to degradation of control system performance, oscillation and instability [4]. Therefore, the stability and stabilization of T-S fuzzy time-delay systems has been one of the hot topics in control research. In recent years, combined with free-weight matrix method, time-division segmentation technique, integral inequality method and advanced Lyapunov function method, scholars have obtained a large number of meaningful time-delay-dependent stability criteria. Lyapunov-Krasovskii functional was constructed [5], it was associated with a delay variable, the integration interval is not fixed. The stability criteria of a time-delayed recurrent neural network system are given, and it is proved that this method can be implemented, and there is the same effect as the time-delayed segmentation. However, the Lyapunov-Krasovskii functional method is not easy to integrate controllers. Lyapunov-Krasovskii functional was improved, it was combined with the integral inequality of the free weight matrix, a stability criterion was given for the T-S fuzzy time-delay system [6, 7], it is less conservative. However, the process is complex and not easy to design the controller. Based on the free weight matrix method, a memory state feedback controller was designed for uncertain stochastic time-varying delay systems [8]. However, introducing too many free weight matrices may increase the computational complexity. An appropriate free weight matrix was introduced, a series of new single integral inequalities were proposed [9], and it is proved that this inequality contains Wirtinger’s integral inequality, the inequality of auxiliary functions, etc. Meanwhile, the stability of nonlinear time-delay systems is studied.
On the other hand, for the controller design problem of T-S fuzzy time-delay systems, the current research results are basically based on the parallel distributed compensation (PDC) algorithm. The fuzzy controller and the fuzzy model share the common premise membership number and the number of fuzzy rules. However, the PDC strategy limits the design freedom of the controller, the robustness of the controller is reduced [10]. In recent years, in order to overcome the limitations of the PDC strategy, a controller design strategy has been proposed based on premise mismatch. This method does not require that the fuzzy controller and the fuzzy model have the same premise membership function or the same number of fuzzy rules. A Lyapunov functional is constructed with a triple integral [11], and a less conservative delay-dependent stability criterion is given. Based on the premise mismatch strategy, a fuzzy state feedback controller design method is proposed. In the stability analysis, considering the information of membership functions, based on the premise of non-matching strategies, a polynomial fuzzy controller design method was proposed [12]. For a class of time-delay network systems, Lyapunov-Krasovskii functional method is used to introduce relaxation matrix and matrix inequality [13]. Based on the premise mismatch strategy, a fuzzy state feedback controller design method is proposed [14]. It should be pointed out that when the controller is designed based on the premise mismatch strategy, only the situation is considered that the premise membership function is not the same, and the situation is not considered that the number of fuzzy rules is inconsistent. If the membership functions in the premise of the fuzzy rules of the fuzzy controllers are allowed to be designed arbitrarily, we can even achieve better design flexibility. For instance, a fuzzy controller not sharing the same premise rules as those of the T-S fuzzy model referred to as imperfect premise matching is employed to control the nonlinear plants [15, 16], and the available results are extended to the T-S fuzzy time-delay systems with only the state delay [17].
For a class of T-S fuzzy time-delay systems, the appropriate Lyapunov-Krasovskii functionals are constructed, and the integral inequalities of a free weight matrix are combined to give the stability criterion of time-delay with less conservativeness. Based on the premise mismatch strategy, a more flexible design method of fuzzy state feedback controller is proposed. This method does not require the controller and system to share the common premise membership function and the number of rules. By selecting a simpler membership function and a small number of fuzzy rules, a simple and effective fuzzy controller design method is proposed.
Problem description
Fuzzy model
The state feedback control problem for a class of nonlinear time-delay systems is shown in Fig. 1. The system mainly includes the fuzzy state feedback controllers of the controlled object in the T-S fuzzy model and the unmatched strategy of the premise, the different fuzzy rule bases are adopt in the fuzzy model and the fuzzy controller. The main goal of this paper is to give the stability criteria of fuzzy time-delay systems. Based on this, a fuzzy state feedback controller is designed based on the premise mismatch strategy, so that the controlled object is asymptotically stable in the T-S fuzzy model.
The T-S fuzzy model of the controlled object is described as Eq. (1):
Rule : IF is and is and , is THEN
Where is a state variable, is a control variable, , , and , are known system matrices with appropriate dimensions; is a fuzzy term of rule corresponding to the function , ; are fuzzy sets, the time lag is known and fixed, and is the initial state defined on .
At this point, the T-S fuzzy model can represent Eq. (2):
Where is the membership function of in , here has , .
Control system block diagram.
Fuzzy controller based on premise mismatch strategy
Based on the premise mismatch strategy, a fuzzy state feedback controller Eq. (3) is given:
Rule : IF is and IF is and IF is THEN
Parallel distributed compensation (PDF) requires , the output of the PDF controller is determined by the summation: [21]. It is important to note that T-S models of the plant the PDF compensator contain the same number of rules, that membership functions for for the corresponding rules are the same. We relax the conditions or , here.
At this point, the state feedback fuzzy control law is represented by Eq. (4):
Here, is the control gain matrix to be solved.
Combining Eqs (2) and (4), the closed-loop system of the T-S fuzzy model can be obtained in a compact form Eq. (5):
Where , , , .
Note 1: Unlike the traditional PDC strategy, this paper does not require that the fuzzy model and the fuzzy controller share a common number of premise membership functions and fuzzy rules, ie and are not required. In the following, the design method of the fuzzy controller is proposed in this paper, it is more flexible and more widely applicable.
Preparatory lemma
Lemma 1: (Integral inequality based on free weight matrix) [18, 19]. Assume that is a continuously differentiable function: , for positive definite matrix , , , and arbitrary matrix , , , satisfy Eq. (6):
Lemma 2: (Finsler lemma) [20]. Assume , , and , the following two propositions are equivalent:
(1) (2)
Main theorems
Stability analysis
Theorem 1: For a given time lag , the T-S fuzzy time-delay system (2) is asymptotically stable at , if there exists the following matrix with appropriate dimensions and any matrix make the following LMIs satisfy the following equations:
Where
Proof: Consider the following Lyapunov-Krasovskii functional Eq. (10):
Where
The matrix , , and have suitable dimensions.
By deriving the Lyapunov-Krasovskii functional Eq. (10) along the trajectory (2) versus time , we get the following formula:
If LMIs Eqs (8) and (9) are true, then . From the Lyapunov stability theorem, system (2) is asymptotically stable. This is the end of proof.
Design of fuzzy controller based on premise mismatch strategy
Theorem 2: For a given time lag and a parameter , the closed-loop system (5) is asymptotically stable. If there are the following matrices with appropriate dimensions: , , , , and any matrix , , , , make the following LMIs satisfy the following equations:
At this time, the controller gain is .
Where
Proof: Based on the proof of Theorem 1, we can get Eq. (19) from Eq. (16).
Where
Define the matrix:
Where is the adjustment parameter, is an arbitrary matrix, .
From Eqs (20) and (22), , Lemma 2 is used, if there is , then is equivalent to .
If LMIs Eqs (17) and (18) are true, then , According to the Lyapunov stability theorem, the closed-loop system (5) is asymptotically stable. This is the end of proof.
Note 2: It is worth pointing out that when dealing with the control problem of fuzzy systems, the PDC strategy can well solve , and . However, when or , the parallel distributed compensation (PDC) strategy cannot do anything [21, 22]. However, the proposed controller design strategy in this paper can effectively solve this situation.
Simulation example
Example 1: T-S fuzzy time-delay systems are given with and two regular numbers [23].
For the T-S fuzzy time-delay system of Example 1, Table 1 shows the maximum allowable time lag for the asymptotic stability of the system by different methods. Obviously, is obtained by Theorem 1 is the largest This shows that Theorem 1 is less conservative than the method which was proposed in [23, 24, 25, 26, 27].
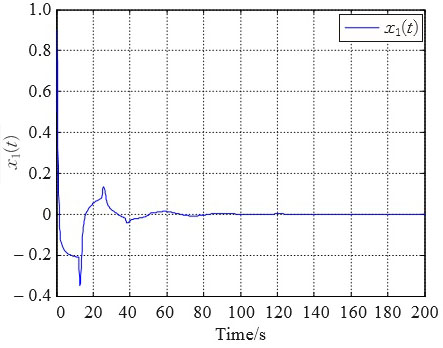
Where represents the angular displacement of the trailer and the truck, represents the angular displacement of the trailer, represents the vertical displacement of the rear end of the trailer, represents the traction guiding angle, the length of the truck is 2.8 m, and the trailer length 1.5 m, the reverse speed is fixed, and 1.0 m/s, the lag coefficient 0.7, 2.0 s, 0.5 s.
The approximation of the above nonlinear system is approximated by using the following fuzzy model with a number of two fuzzy rules.
Rule 1: IF is 0 rad
THEN
Rule 2: IF is rad or rad
THEN
Where
Trailer-to-truck angular displacement difference status response.
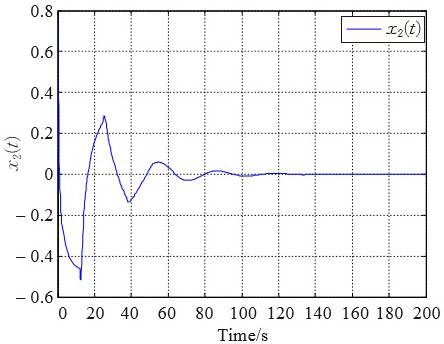
Trailer angular displacement status response.
In this example, the number of fuzzy choices is , . The membership function takes the following form:
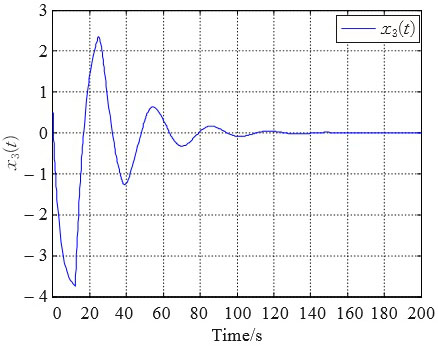
Trailer rear end vertical displacement state response.
This system was also studied in the literature [23, 28], and the maximum allowable time lag was given to ensure system stabilization. The maximum allowable time delays which were obtained in [24] are 10.4653 and 4.7920, respectively, while the maximum allowable time delay which is obtained by Theorem 2 is 751.757. The results given in this paper are much larger than those in the literature [23, 28]. The results indicate that Theorem 2 is less conservative.
In particular, the time delay 12 and the parameter 0.035 are taken. The state feedback gain can be obtained through the Matlab LMI toolbox.
The initial value of is taken, the state response of the T-S fuzzy time-delay closed-loop system describing the truck trailer model is obtained by Matlab simulation, as shown in Figs 2–4. It can be seen from the simulation results that the closed-loop system is asymptotically stable, it explains that the fuzzy state controller design method of the premise mismatch strategy in this paper is effective.
Conclusions
In this paper, for a class of T-S fuzzy time-delay systems, an appropriate Lyapunov-Krasovskii functional is constructed. Combined with a recently proposed integral inequality of the free weight matrix, a time-dependent stability criterion is given with less conservativeness. Based on the premise mismatch strategy, a more flexible fuzzy state feedback controller design method is proposed. This method does not require the controller and system to share a common number of premise membership functions and rules. By selecting a simpler membership function and a smaller number of fuzzy rules, a simple and effective fuzzy controller design method is proposed.
For a class of nonlinear time-delay systems based on the TS fuzzy model description, combined with the Lyapunov function method and the integral inequality method, a new conservative less stability criterion is given, and a fuzzy state feedback control design method is proposed based on the premise mismatch strategy. When solving the controller, Finsler lemma is used to deal with nonlinear coupling terms. By selecting a simpler membership function and a smaller number of fuzzy rules, the design difficulty and cost of the fuzzy controller are reduced, and the design freedom is increased. Compared with the traditional PDC-based controller, the proposed method has better application prospects. Simulation examples show the advanced nature and applicability of the proposed theory. In the actual control system, the time lag is usually indefinite. The next step is to study the stability and control problems of nonlinear systems with time-varying delays.
In response to the huge inference rules in multidimensional fuzzy reasoning, Takagi and Sugeno proposed a new fuzzy reasoning model in 1985, it is called Takagi-Sugeno (T-S) model. The “IF” part of the fuzzy rule of the T-S model is similar to the “IF” part of the zadeh rule. But its “THEN” part is an exact function, usually an input variable polynomial. The conclusion of the T-S fuzzy inference model replaces the constants in the general inference process with linear local equations.
Therefore, the T-S model can generate more complex nonlinear functions with a small number of fuzzy rules, which can effectively reduce the number of fuzzy rules when dealing with multivariable systems, thus producing great advantages. However, since the conclusion parameter is a linear function rather than a fuzzy number, the conclusion part cannot be directly obtained from the expert experience and operational data in the actual system, and must be trained by a certain algorithm. Therefore, the identification of model parameters has become a major problem in the establishment of T-S type fuzzy systems.
The T-S model is designed by the PDC method. Specifically, a local controller is designed separately for each local subsystem model. The resulting local controller is multiplied by the weight of each local rule (generally the membership function of the predecessor variable is taken larger) and the resulting value is the overall controller output. The local fuzzy controller design can be applied by linear design methods or by other mature theoretical methods. The stability analysis of the closed-loop system of the formed model controller is the hottest topic in the field of fuzzy control.
Footnotes
Acknowledgments
This work was support by the Scientific Research Project (NO. 19C0896) of Hunan Provincial Education Department, China. This work was support by the Scientific Research Project (NO. 19B329) of Hunan Provincial Education Department, China.
References
1.
TakagiT. and SugenoM., Fuzzy identification of systems and its applications to modeling and control, IEEE Transactions on Systems, Man, and Cybernetics1 (1985), 116–132.
2.
LiR.C.GuoY.Q. et al., Takagi-Sugeno fuzzy model identification for turbofan aero-engines with guaranteed stability, Chinese Journal of Aeronautics31(6) (2018), 1206–1214.
3.
KwonO.M.ParkM.J.JuH.P. et al., Stability and stabilization of T-S fuzzy systems with time-varying delays via augmented Lyapunov-Krasovskii functionals, Information Sciences37(2) (2016), 1–15.
4.
KangW.ZhongS.ShiK. et al., Finite-time stability for discrete-time systems with time-varying delay and nonlinear perturbations, ISA Transactions60 (2016), 67–73.
5.
WangZ.DingS.ShanQ. et al., Stability of recurrent neural networks with time-varying delay via termina lmethod, IEEE Transactions on Neural Networks and Learning Systems99 (2016), 1–8.
6.
MaC.ZhangX.K. et al., Improved nonlinear control for ship course-keeping based on Lyapunov stability, Chinese Journal of Ship Research14(1) (2019), 150–155.
7.
ChenR.M. and JiangY.F., Stability criterion for a class of T-S fuzzy time-delay systems, Journal of Hangzhou Dianzi University: Natural Science Edition36(5) (2016), 52–56.
8.
LiB.R., Memory feedback control of uncertain stochastic time-varying delay systems, Control Engineering9 (2016), 1462–1468.
9.
ChenJ.XuS. and ZhangB., Single/multiple integral inequalities with applications to stability analysis of time-delay systems, IEEE Transactions on Automatic Control99 (2016), 1–9.
10.
LamH.K. and LeungF.H.F., Stability analysis of fuzzy-model based control systems, Berlin, Germany: Springer, 2011.
11.
SunC.WangF.L. and HeX.Q., Delay-dependent stability and stabilization criteria for T-S fuzzy singular systems with interval time-varying delay by improved delay partitioning approach, SpringerPlus5(1) (2016), 349–373.
12.
LiX.LamH.K.LiuF. et al., Stability and stabilization analysis of positive polynomial fuzzy systems with time delay considering piecewise membership functions, IEEE Transactions on Fuzzy Systems25(4) (2017), 958–971.
13.
YangJ.LuoW.P. et al., Further improved stability criteria for uncertain T-S fuzzy systems with time-varying delay by (m, N)-delay-partitioning approach, ISA Transaction59 (2015), 20–28.
14.
XuJ.W. and ZhouS.S., Mismatched controller design for a class of networked control systems, Journal of Hangzhou Dianzi University: Natural Science Edition36(1) (2016), 46–50.
15.
LamH.K. and LeungF.H.F., LMI-based stability and performance design of fuzzy control systems: fuzzy models and controllers with different premises, in: Proceedings of the International Conference on Fuzzy Systerm, Vancouver, Canada, 2006, pp. 9599–9506.
16.
LamH.K. and NarimaniM., Stabilityanalysisandperfomance design for fuzzy-model-based control system under imperfect premisematching, IEEE Transactionson Fuzzy Systems17(4) (2009), 949–961.
17.
ZhangZ.J.HuangX.L.BanX.J. and GaoX.Z., Stability analysis and controller design of T-S fuzzy systems with timedelay under imperfect premise matching, Journal of Beijing Institute of Technology21(3) (2012), 387–393.
18.
ZengH.B.HeY.WuM. et al., Free-matrix-based integral inequality for stability analysis of systems with time-varying delay, IEEE Transactions on Automatic Control60(10) (2015), 2768–2772.
19.
ZhiY.L.HeY. and WuM., Improved free matrix-based integral inequality for stability of systems with time-varying delay, IET Control Theory & Applications11(10) (2017), 1571–1577.
20.
TrégouëtJ.F.SeuretA. and Di LoretoM., A periodic approach for input-delay problems: application to network controlled systems affected by polytopic uncertainties, International Journal of Robust and Nonlinear Control26(3) (2016), 385–400.
21.
WangH.O. and LiJ., Parallel distributed compensation for Takagai-Sugeno fuzzy model: new stable conditions and dynamic feedback designs, ACTA Automatica Sinica27(4) (2001), 460–476.
22.
WangH.O.TanakaK. and GriffinM.F., Parallel distributed compensation of nonlinear systems by Takagi-Sugeno fuzzy model, in: Proceedings of the 4th IEEE International Conference on Fuzzy Systems and the Second International Fuzzy Engineering Symposium (FUZZ-IEEE/IFES), New York, USA: IEEE, 1995, pp. 531–538.
23.
ZhaoY.GaoH.LamJ. et al., Stability and stabilization of delayed T-S fuzzy systems: a delay partitioning approach, IEEE Transactions on Fuzzy Systems17(4) (2009), 750–762.
24.
LiuF.WuM.HeY. et al., New delay-dependent stability criteria for TS fuzzy systems with time-varying delay, Fuzzy Sets and Systems161(15) (2010), 2033–2042.
25.
AnJ.LiT.WenG. et al., New stability conditions for uncertain TS fuzzy systems with interval time-varying delay, International Journal of Control, Automation and Systems10(3) (2012), 490–497.
26.
LianZ.HeY.ZhangC.K. et al., Stability analysis for TS fuzzy systems with time-varying delay via free matrix based integral inequality, International Journal of Control, Automation and Systems14(1) (2016), 21–28.
27.
ZengH.B.ParkJ.H.XiaJ.W. et al., Improved delay dependence stability criteria for T-S fuzzy systems with time-varying delay, Applied Mathematics and Computation235 (2014), 492–501.
28.
ZhaoL.GaoH. and KarimiH.R., Robust stability and stabilization of uncertain TS fuzzy systems with time-varying delay: an input-output approach, IEEE Transactions on Fuzzy Systems21(5) (2013), 883–897.